一种智能割胶机器人及割胶方法
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及农业采集领域,具体地说是一种智能割胶机器人。
背景技术
随着科技发展,现有技术中也出现了专门用于割胶的割胶机,但现有技术中的割胶机多为一树一机方案,安装较为复杂,无法灵活行走,而且橡胶树生长速度快,每次割胶都需要对割胶机进行人工调整,这也增加了割胶的人工成本。
发明内容
本发明的目的在于提供一种智能割胶机器人,能够代替人工割胶,降低人工成本,并且行走灵活,可实现一机多树割胶,提高了割胶效率。
本发明为实现上述目的所采用的技术方案是:
一种智能割胶机器人,包括全地形底盘(6)、储胶罐(2)、六轴机械臂(1)、GPS模块(5)、激光雷达(7)、摄像云台(9)、扫描仪(12)、电动割胶刀(11)、吸胶管(10)、橡胶收集泵和控制器,其中储胶罐(2)和六轴机械臂(1)均设于全地形底盘(6)上,所述六轴机械臂(1)自由端设有电动割胶刀(11)、吸胶管(10)和扫描仪(12),在所述全地形底盘(6)前端设有GPS模块(5)、激光雷达(7)和摄像云台(9),所述全地形底盘(6)的底盘车体(13)内设有控制器,且所述GPS模块(5)、激光雷达(7)、摄像云台(9)和扫描仪(12)均通过所述控制器控制。
所述全地形底盘(6)的一侧设有蓄电池(4),所述全地形底盘(6)的前端设有照明灯(8),所述全地形底盘(6)后部设有通讯模块(3)。
所述全地形底盘(6)的底盘车体(13)内的后部设有驱动储胶罐(2)转动的驱动机构。
所述驱动机构包括储胶罐驱动电机(14)、驱动齿轮(15)和从动齿轮(16),其中驱动齿轮(15)和从动齿轮(16)啮合,且所述驱动齿轮(15)安装于储胶罐驱动电机(14)的输出轴上,从动齿轮(16)与储胶罐(2)固连。
所述储胶罐驱动电机(14)上设有编码器。
一种智能割胶机器人的割胶方法,包括以下步骤:
1)在橡胶树固定位置布置二维码标牌,并在云端系统中录入胶园、橡胶树信息;
2)云端系统通过已录入的胶园、橡胶树信息,规划出机器人采胶路径;
3)割胶机器人根据云端系统规划的路径进行移动;
4)割胶机器人行走至橡胶树固定位置前,利用摄像云台(9)读取二维码标牌,读取并记录本次橡胶树信息;
5)割胶机器人通过电动割胶刀(11)进行割胶;
6)机器人在割胶结束后,通过吸胶管(10)采集胶液并回收在储胶罐(2)中。
步骤5)包括两种方法,分别为:
a)工作人员指定给割胶机器人割胶位置并控制割胶机器人动作。
b)由云端系统发出指令控制割胶机器人动作。
所述云端系统包括:
感知域,用于与割胶机器人通信,负责接入割胶机器人的感知数据,并发送给计算域;
计算域,用于处理从割胶机器人收集的感知数据;
数据域,用于接收来自计算域的割胶机器人收集的感知数据并进行结构化处理,将处理后的结构化数据输出给服务域;
服务域,用于提供割胶机器人的状态跟踪、行为控制、环境监控;
存储域,用于支撑云端系统中计算域、数据域、服务域的过程数据存储。
本发明具有以下有益效果及优点:
1.本发明采用远程控制割胶机器人代替人工割胶的方式,减少人工成本,割胶更为安全可靠;
2.本发明采用一机多树的方案代替传统一机一树方案,安装及操作简单,行走灵活,利用率高;
3.本发明具有多重环境感知的能力,通过精准GPS定位,激光雷达感知周围环境,3D扫描仪感知割胶细节,极大程度的提高对周围环境的感知能力,更能适应复杂环境;
4.本发明采用云端计算的方法,将数据信息传输至云端,信息传输具有更低延迟及更高的可靠性;
5.本发明能够进行全地形自动巡航,可以进行胶液防盗,自动巡检,森林防火等功能。
附图说明
图1为本发明的结构示意图;
图2为本发明用于驱动储胶罐转动的驱动机构示意图;
其中,1为六轴机械臂,2为储胶罐,3为通讯模块,4为蓄电池,5为GPS模块,6为全地形底盘,7为激光雷达,8为照明灯,9为摄像云台,10为吸胶管,11为电动割胶刀,12为扫描仪,13为底盘车体,14为储胶罐驱动电机,15为驱动齿轮,16为从动齿轮;
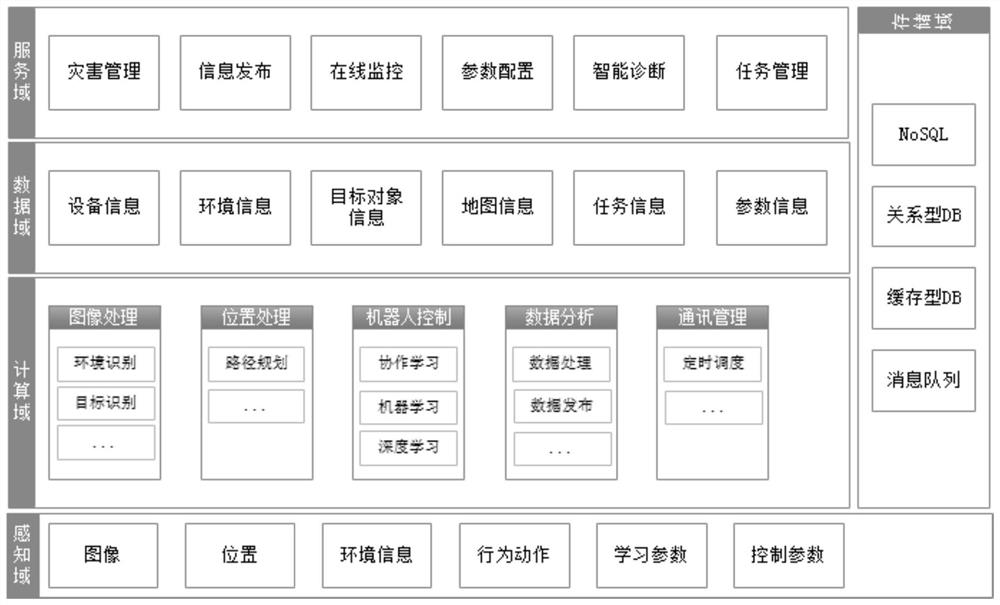
图3为机器人云端框架示意图。
具体实施方式
下面结合附图对本发明作进一步详述。
如图1~2所示,本发明包括全地形底盘6、储胶罐2、六轴机械臂1、GPS模块5、激光雷达7、摄像云台9、扫描仪12、电动割胶刀11、吸胶管10、橡胶收集泵和控制器,其中储胶罐2和六轴机械臂1均设于全地形底盘6上侧,所述六轴机械臂1自由端设有电动割胶刀11、吸胶管10和扫描仪12,在所述全地形底盘6前端设有GPS模块5、激光雷达7和摄像云台9,所述全地形底盘6的底盘车体13内设有控制器,且所述GPS模块5、激光雷达7、摄像云台9和扫描仪12均通过所述控制器控制。本发明工作时,全地形底盘6带动储胶罐2和六轴机械臂1移动,GPS模块5实现精准定位,激光雷达7感知周围环境,移动到位后六轴机械臂1驱动电动割胶刀11开始割胶作业,同时所述扫描仪12感知割胶细节,另外每个橡胶树上均设有二维码标牌,摄像云台9读取二维码标牌并记录本次橡胶树的信息。
如图1所示,所述全地形底盘6的一侧设有蓄电池4用于为各个部分供电,另外所述全地形底盘6的前端设有照明灯8用于夜间或暗处照明,所述全地形底盘6后部设有通讯模块3。
如图2所示,所述全地形底盘6的底盘车体13内的后部设有用于驱动储胶罐2转动的驱动机构,所述驱动机构包括储胶罐驱动电机14、驱动齿轮15和从动齿轮16,其中驱动齿轮15和从动齿轮16啮合,且所述驱动齿轮15安装于储胶罐驱动电机14的输出轴上,从动齿轮16与储胶罐2固连,储胶罐驱动电机14通过驱动齿轮15驱动从动齿轮16转动,进而实现驱动储胶罐2转动目的,另外储胶罐驱动电机14上设有编码器用于控制储胶罐2旋转角度。所述驱动机构主要用于储胶罐2的罐体较大且本发明行走于特殊地形的情况下,以实现储胶罐2姿态角度调整躲避障碍物,保证行走和顺利割胶。
所述全地形底盘6、储胶罐2、六轴机械臂1、GPS模块5、激光雷达7、摄像云台9、扫描仪12、通讯模块3、蓄电池4、电动割胶刀11、吸胶管10和控制器均为本领域公知技术。本实施例中,所述全地形底盘6的厂家为山东国兴智能科技股份有限公司,型号为600mini,所述六轴机械臂1的厂家为Ufactory,型号为xArm6,所述GPS模块5的厂家为千寻位置,型号为MC120M,所述激光雷达7的厂家为镭神智能,型号为C16700B,所述摄像云台9的厂家为浙江大华技术股份有限公司,型号为DH-PTZ11204-GN-P,所述扫描仪12为3D扫描仪,厂家为polyga,型号为C210,所述通讯模块3的厂家为有人物联网,型号为USR-G780 V2,所述蓄电池4的厂家为超燕电源,型号为6-EVF-60。
本发明的工作原理为:
首先在各个橡胶树上先布置二维码标牌,并在系统数据库中录入橡胶树信息(包括树龄、采胶历史记录等),然后控制系统计算并设定本发明的最优移动路径,本发明的全地形底盘6按照设定的移动路径移动至相应位置,当本发明行走到位时,摄像云台9读取橡胶树上的二维码标牌,读取并记录本次橡胶树信息,然后本发明可选择两种不同方案割胶,其中方案一利用高速传输和虚拟VR技术,使工作人员可以远端遥控指定机器人割胶位置,实现精准割胶,此方案也即人工远程操控,所述虚拟VR技术为公知技术,方案二利用高速传输和云端图形识别技术自动计算割胶位置,并由云端发出指令控制割胶机器人动作,此方案也即机器人系统自动割胶,所述云端图形识别技术为公知技术。割胶结束后,全地形底盘6按照设定路径依照顺序到积满胶液的树前用吸胶管10采集胶液并统一回收。
云端具体实现方案如下:
(具体描述云端、数据库的实现方法)
云端系统旨在支撑割胶机器人能够以智能化的方式完成割胶,辅助人控制割胶机器人,同时提供数据化的手段管理胶园及胶园环境监控。如图3所示,为机器人云端框架示意图:感知域、计算域、数据域、服务域及存储域。域是云端系统能力细分,感知域完成同割胶机器人通信,主要负责接入全方位感知数据,包括胶树割面图像、割胶机器人行为信息、位置信息及胶园环境信息等,同时提供机器人学习模型同步,控制参数下发。计算域:用于过滤、聚类、学习、训练及处理从割胶机器人收集的数据,包括实时环境数据、位置信息数据、目标空间数据等。数据域:全局数据模型,包括关于环境(如用于导航的对象位置和地图)、对象识别模型(如动作轨迹、胶树割面图像和模型)和任务知识的信息,负责云端系统数据结构化处理。接收来自计算域的输出的中间处理数据,将非结构化数据根据目标需求封装成满足业务处理需求的结构化数据。结构化数据封装结构通过数据库持久化或向其上层提供数据服务;。服务域:提供机器人状态跟踪、学习更新、行为控制、环境监控等,服务域能力输出依赖数据域输出的结构化数据。服务域通过数据域提供的数据接口或通过数据库的两种方式,实现数据加工,完成状态跟中、环境监控等。割胶机器人之间可以通过云端的知识库与其他机器人即时分享他们所学到的技能,其他机器人就可以通过重用共享的知识来提高学习的速度,服务域为执行任务的机器人提供了一个信息共享通道,构建割胶机器人服务集群环境。存储域支撑云端系统上计算域、数据域、服务域的过程数据存储需求,提供从队列存储到缓存系统到持久化存储的多层次存储机制。
云端应用系统整体上采用容器虚拟化模式搭建,云端涉及的计算和服务全部在一个个单元容器中完成,形成一套基于Kubernetes的计算集群和服务集群。这样一套容器虚拟化模式提供计算弹性与服务弹性的契合。数据处理(覆盖计算域、数据域、服务域)是构建云端系统的核心能力,云端数据处理是由HDFS和MapReduce组成基于Hadoop数据处理系统,利用Hadoop集群并行处理数据,提高计算速度。计算域中的图像分析处理及机器人的学习模型训练都是耗时活动,其响应时间直接影响割胶机器人的在割胶任务中的使用效果。在胶树割面的图像分析采用基于深度学习的YOLOv3算法,利用Hadoop集群并行计算,可以快速提供割面目标空间结果,并进行模型修正,可以接近准实时。并且,这些处理发生在数据或存储附近,从而减少了网络上的I/O延迟。同时HDFS文件系统还负责将文件数据分割成可管理的块,并将它们分布在多个节点上,优化MapReduc并行处理大数据集。数据存储(数据库)除了计算过程HDFS使用外,在云端系统中还使用了缓存、关系数据库、非关系数据库。根据业务(服务)的特点选择相应的存储辅助任务完成。云端系统的数据存储(数据库)使用到Redis、MongoDB、Postgresql构建了多层级数据库。
- 一种智能割胶机器人及割胶方法
- 一种割胶机器人系统及割胶方法