一种机器人关节的驱动控制方法
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及一种机器人关节的驱动控制方法,属于机器人技术领域。
背景技术
现有机器人的关节大多为电机加减速机或同步带等传动控制,电机和减速机等部件很多都在关节上或手臂上,由于受限于机器人外形尺寸,所选用电机功率不可能很大,这就导致了机器人末端负载能力大大减小。
另外,还有少数机器人的关节采用液压传动控制,而液压控制最大的问题是不精准,且自由度不够多。
要使得机器人更加灵活,执行动作精确,负载能力强,现有技术无法完成,需要继续创新。
发明内容
为了克服上述现有技术的不足,本发明提供了一种机器人关节的驱动控制方法,采用伺服液压驱动结构,控制机器人在末端大负载的情况下完成精准动作,且关节和机械臂上占用空间和重量大为减少。
为了实现上述技术目的,本发明采用的技术方案是:一种机器人关节的驱动控制方法,每组伺服电机机构带动一个输入油缸和一个输出油缸,输入油缸与输出油缸通过油管串联,输出油缸两端分别连接关节的构成部件,通过伺服电机机构精确控制输入油缸的动作,从而带动输出油缸作用于关节,做出精准运动。
进一步的,所述伺服电机机构包括伺服电机,伺服电机通过联轴器连接滚珠丝杠,在滚珠丝杠上安装丝杆螺母和牵引板,输入油缸的输入活塞杆连接牵引板。
更进一步的,每组伺服电机机构的所述伺服电机均通过电机固定板安装,并位于电机固定板的同一侧。
更进一步的,所述联轴器上设置下层安装板和上层安装板,丝杠轴承座安装在下层安装板和上层安装板上,滚珠丝杠位于下层安装板和上层安装板之间,输入油缸设置在上层安装板上。
更进一步的,所述下层安装板和上层安装板之间还设置有若干根导柱,牵引板的一个安装耳套接在相邻的一根导柱上,牵引板上对称的另一个安装耳安装输入活塞杆。
更进一步的,所述牵引板的安装耳通过直线轴承安装在导柱上。
进一步的,所述关节的构成部件包括输出油缸两端的球头,用于安装球头的球头座。
更进一步的,所述上层安装板连接机身架,肩关节包括与机身架旋转连接的肩轴,与肩轴铰接的肩头架,一端与肩头架球头座连接,另一端与上层安装板或下层安装板上的球头座连接的肩关节输出油缸;每个肩关节只需两组伺服电机机构控制的输入油缸带动各自按不同角度布置的输出油缸,实现多自由度精准运动。
更进一步的,所述肩头架内安装肩头电机,肩头架通过肩头电机枢转连接大臂架,在大臂架中安装小臂输出油缸,大臂架下端通过小臂输出油缸活塞杆铰接小臂架,每个肘关节靠一组伺服电机机构控制的输入油缸带动小臂输出油缸,实现大力矩精准运动。
本发明的有益技术效果是:结构简单,紧凑,易于在机器人体内安装;伺服电机驱动滚珠丝杠精确控制牵引油缸,输入油缸的活塞压入的时候对应输出油缸顶出,输入油缸的动作从而带动输出油缸作用于关节的精准运动,不需要额外加油泵,每个肩关节只需两组伺服电机机构控制即可实现多自由度精准运动,每个肘关节靠一组伺服控制即可实现大力矩精准运动,且在关节和机械臂上占用空间和重量大为减少,增加了末端负载能力。
附图说明
下面结合附图对本发明进一步说明。
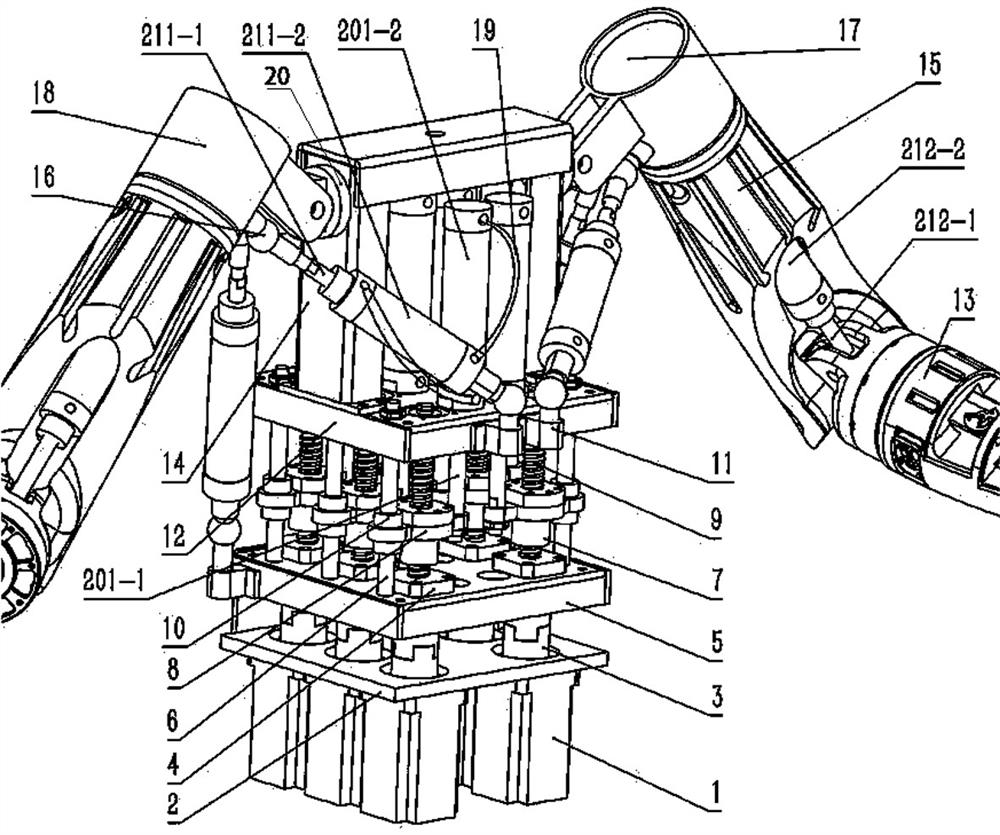
图1为本发明局部剖切结构示意图。
图中:1、伺服电机,2、电机固定板,3、联轴器,4、丝杠轴承座,5、下层安装板,6、导柱,7、丝杆螺母,8、牵引板,9、滚珠丝杠,10、直线轴承,11、球头座,12、上层安装板,13、小臂架,14、机身架,15、大臂架,16、球头,17、电机,18、肩头架,19、油管,20、肩轴,201、输入活塞杆,202、输入油缸,211、肩关节输出活塞杆,212、肩关节输出油缸,221、小臂输出活塞杆,222、小臂输出油缸。
具体实施方式
实施例1
一种机器人关节的驱动控制方法,每组伺服电机机构带动一个输入油缸和一个输出油缸,输入油缸与输出油缸通过油管19串联,输出油缸两端分别连接关节的构成部件,通过伺服电机机构精确控制输入油缸的动作,从而带动输出油缸作用于关节,做出精准运动。
实施例2
如图1所示,作为实施例1的具体结构设计,所述伺服电机机构包括伺服电机1,伺服电机1通过联轴器3连接滚珠丝杠9,在滚珠丝杠9上安装丝杆螺母7和牵引板8,输入油缸202的输入活塞杆201连接牵引板8。
作为一种优化设计,每组伺服电机机构的伺服电机1均通过电机固定板2安装,并位于电机固定板2的同一侧。
作为一种优化设计,所述联轴器3上设置下层安装板5和上层安装板12,丝杠轴承座4安装在下层安装板5和上层安装板12上,滚珠丝杠9位于下层安装板5和上层安装板12之间,输入油缸202设置在上层安装板12上。
作为一种优化设计,所述下层安装板5和上层安装板12之间还设置有若干根导柱6,牵引板8的一个安装耳套接在相邻的一根导柱6上,牵引板8上对称的另一个安装耳安装输入活塞杆201。
作为一种优化设计,所述牵引板8的安装耳通过直线轴承10安装在导柱6上。
实施例3
作为实施例2结构的进一步设计,所述关节的构成部件包括输出油缸两端的球头,用于安装球头16的球头座11。
作为一种优化设计,所述上层安装板12连接机身架14,肩关节包括与机身架14旋转连接的肩轴20,与肩轴20铰接的肩头架18,一端与肩头架18球头座连接,另一端与上层安装板12或下层安装板5上的球头座11连接的肩关节输出油缸212;每个肩关节只需两组伺服电机机构控制的输入油缸带动各自按不同角度布置的输出油缸,实现多自由度精准运动。
作为一种优化设计,所述肩头架18内安装肩头电机17,肩头架18通过肩头电机17枢转连接大臂架15,在大臂架15中安装小臂输出油缸222,大臂架15下端通过小臂输出活塞杆221铰接小臂架13,每个肘关节靠一组伺服电机机构控制的输入油缸带动小臂输出油缸222,实现大力矩精准运动。
本发明给出了一种伺服液压驱动的机器人结构和控制方法,包括若干个伺服电机、联轴器、滚珠丝杠和导柱、电机固定板、输入油缸、输出油缸、上层板、下层板、机身、球头、肩头架、肩轴、大臂、小臂,电机固定板用于连接固定伺服电机,伺服电机驱动滚珠丝杠牵引被动油缸,一个输入油缸与一个输出油缸通过油管串联,输出油缸两端分别连接构成关节的两部件,输入油缸的活塞压入的时候对应输出油缸顶出,通过伺服电机和滚珠丝杠精确控制输入油缸的动作从而带动输出油缸作用于关节的精准运动,每一个伺服电机带动一组输入输出油缸,油缸和管路中填满传动液, 不需要额外加油泵,每个肩关节只需要两组伺服控制的输入油缸带动按一定角度布置的两组输出油缸就可以实现多自由度精准运动,每个肘关节靠一组伺服控制的输入油缸带动一组输出油缸就可以实现大力矩精准运动,且在关节和机械臂上占用空间和重量大为减少,增加了末端负载能力。
- 一种液压驱动关节型足式机器人关节间解耦控制方法
- 具有张力和关节位置反馈的机器人关节用挠性驱动单元控制方法