机器人系统
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及一种机器人系统,其具备与从上位装置发送的指令对应地动作的工业用机器人、从上位装置接收指令来控制工业用机器人的控制器以及连接控制器的管理装置。
背景技术
目前,已知一种管理工业用机器人的动作历史的动作历史管理系统(例如,参照专利文献1)。专利文献1中记载的动作历史管理系统具备上位装置、与从上位装置发送的指令对应地动作的工业用机器人、从上位装置接收指令来控制工业用机器人的控制器以及连接控制器的管理装置。工业用机器人是搬运玻璃基板等工件的水平多关节型机器人。工业用机器人具备用于使工业用机器人动作的多个伺服电动机。
在专利文献1中记载的动作历史管理系统中,管理装置从控制器获取各种数据。在管理装置从控制器获取的数据中,包括有控制器从上位装置接收到的指令和工业用机器人的转矩数据,管理装置从控制器获取工业用机器人进行转矩监视用的特定动作时的一系列转矩数据。在管理装置中,对工业用机器人进行特定动作时的转矩数据预先设定了最大转矩的管理范围和最小转矩的管理范围。
在专利文献1中记载的动作历史管理系统中,管理装置判断从控制器获取到的一系列转矩数据中最大转矩及最小转矩是否偏离了管理范围。另外,管理装置在最大转矩及最小转矩中的至少任一方偏离了管理范围的情况下,判定为有异常,并将该转矩数据作为异常数据进行存储。
现有技术文献
专利文献
专利文献1:日本专利特开2019-171490号公报
发明内容
发明所要解决的技术问题
专利文献1所记载的动作历史管理系统中,在管理动作历史的工业用机器人中,一般而言,用于使工业用机器人动作的伺服电动机连接至减速器。本申请发明人探讨了使用专利文献1所记载的动作历史管理系统来管理工业用机器人的减速器的经年劣化的情况。然而,通过本申请发明人的研究可知,如果使用工业用机器人进行转矩监视用的特定动作时的一系列转矩数据中的最大转矩、最小转矩来判定减速器是否因经年劣化而引起异常,则判定减速器是否因经年劣化而引起的异常的判定精度有可能降低。
因此,本发明的课题在于提供一种机器人系统,其具备具有伺服电动机及连接有伺服电动机的减速器的工业用机器人,能够提高对减速器是否有因经年劣化引起的异常进行判定的判定精度。
解决技术问题所采用的技术方案
为了解决上述技术问题,本申请发明人首先研究了当使用工业用机器人进行转矩监视用的特定动作时的一系列转矩数据中的最大转矩或最小转矩来判定减速器是否有因经年劣化引起的异常时,判定精度有可能降低的原因。其结果是,本申请发明人得到如下见解:当工业用机器人进行转矩监视用的特定动作时,在伺服电动机的转矩为最大的情况或伺服电动机的转矩为最小的情况下,伺服电动机进行加速/减速动作,较大的力作用于减速器,因此,一系列的转矩数据中的最大转矩或最小转矩难以反映减速器本身的特性。另外,本申请发明人得到如下见解:由于一系列的转矩数据中的最大转矩或最小转矩难以反映减速器本身的特性,因此,如果使用一系列的转矩数据中的最大转矩或最小转矩来判定减速器是否有因经年劣化而引起的异常,则判定精度有可能降低。
另一方面,本申请发明人得到如下见解:在转矩监视用的特定动作中,在伺服电动机等速旋转时或伺服电动机停止时,作用于减速器的力减小,因此,伺服电动机等速旋转时的转矩数据或停止时的转矩数据中容易反映出减速器本身的特性。另外,本申请发明人得到如下见解:由于伺服电动机等速旋转时的转矩数据或停止时的转矩数据中容易反映出减速器本身的特性,因此如果使用等速旋转时的转矩数据或停止时的转矩数据来判定减速器是否有因经年劣化而引起的异常,则能够提高判定精度。
本发明的机器人系统是基于该新的见解而设立的,其特征在于,包括:上位装置;工业用机器人,其具有对应于从上位装置发送的指令进行旋转的伺服电动机;控制器,其从上位装置接收指令来控制伺服电动机;以及管理装置,其连接控制器,工业用机器人具备连接伺服电动机的减速器,管理装置进行从控制器获取伺服电动机的转矩数据和指令的获取处理,并且若将提取在获取处理中获取的转矩数据中的伺服电动机以等速旋转时的部分即等速时转矩数据的处理设为等速时转矩数据提取处理,将提取在获取处理中获取的转矩数据中的伺服电动机停止时的部分即停止时转矩数据的处理设为停止时转矩数据提取处理,将进行等速时转矩数据的统计处理并计算基于等速时转矩数据的最大值、最小值、平均值、中间值、标准偏差及方差中的至少任一个的等速时统计处理数据的处理设为等速时统计处理,将进行等速时转矩数据的FFT处理来求出等速时FFT数据的处理设为等速时FFT处理,将进行停止时转矩数据的统计处理并计算基于停止时转矩数据的最大值、最小值、平均值、中间值、标准偏差及方差中的至少任一个的停止时统计处理数据的处理设为停止时统计处理,将进行停止时转矩数据的FFT处理来求出停止时FFT数据的处理设为停止时FFT处理,将包括等速时转矩数据提取处理和等速时统计处理的处理设为第一数据处理,将包括等速时转矩数据提取处理和等速时FFT处理的处理设为第二数据处理,将包括停止时转矩数据提取处理和停止时统计处理的处理设为第三数据处理,将包括停止时转矩数据提取处理和停止时FFT处理的处理设为第四数据处理时,则进行第一数据处理、第二数据处理、第三数据处理及第四数据处理中的至少任一种数据处理,此外,在进行第一数据处理时,将等速时统计处理数据和指令相关联地保存,且将根据等速旋转时的伺服电动机的转速和指令设定的第一基准值和等速时统计处理数据进行比较,基于比较结果判定减速器有无异常,在进行第二数据处理时,对应保存等速时FFT数据和指令,且将根据等速旋转时的伺服电动机的转速和指令设定的第二基准值与等速时FFT数据的峰值相比较,基于比较结果判定减速器有无异常,在进行第三数据处理时,将停止时统计处理数据和指令相关联地保存,且将根据指令设定的第三基准值和停止时统计处理数据进行比较,基于比较结果判定减速器有无异常,在进行第四数据处理时,将停止时FFT数据和指令相关联地保存,且将根据指令设定的第四基准值和停止时FFT数据的峰值进行比较,基于比较结果判定减速器有无异常。
在本发明的机器人系统中,管理装置在进行第一数据处理时,基于等速时统计处理数据和第一基准值的比较结果判定减速器有无异常,该等速时统计处理数据基于伺服电动机以等速旋转时的转矩数据即等速时转矩数据来计算,在进行第二数据处理时,基于通过对等速时转矩数据进行FFT处理而求出的等速时FFT数据的峰值和第二基准值的比较结果来判定减速器有无异常。另外,在本发明中,管理装置在进行第三数据处理时,基于停止时统计处理数据和第三基准值的比较结果来判定减速器有无异常,该停止时统计处理数据基于伺服电动机停止时的转矩数据即停止时转矩数据来计算,在进行第四数据处理时,基于通过对停止时转矩数据进行FFT处理而求出的停止时FFT数据的峰值和第四基准值的比较结果来判定减速器有无异常。即,在本发明中,管理装置使用伺服电动机等速旋转的等速旋转时的转矩数据或伺服电动机停止的停止时的转矩数据来判定减速器有无异常。因此,在本发明中,能够提高减速器是否有因经年劣化而引起的异常的判定精度。
在本发明中,例如,管理装置在进行第一数据处理时,判断等速时统计处理数据是否超过第一基准值,在等速时统计处理数据超过第一基准值的情况下,判定为减速器有异常,或者判断第一基准值和等速时统计处理数据之差是否超过规定的第一允许值,在第一基准值和等速时统计处理数据之差超过第一允许值的情况下,判定为减速器有异常,管理装置在进行第二数据处理时,判断等速时FFT数据的峰值是否超过第二基准值,在等速时FFT数据的峰值超过第二基准值的情况下,判定为减速器有异常,或者判断第二基准值和等速时FFT数据的峰值之差是否超过规定的第二允许值,在第二基准值和等速时FFT数据的峰值之差超过第二允许值的情况下,判定为减速器有异常,管理装置在进行第三数据处理时,判断停止时统计处理数据是否超过第三基准值,在停止时统计处理数据超过第三基准值的情况下,判定为减速器有异常,或者判断第三基准值和停止时统计处理数据之差是否超过规定的第三允许值,在第三基准值和停止时统计处理数据之差超过第三允许值的情况下,判定为减速器有异常,管理装置在进行第四数据处理时,判断停止时FFT数据的峰值是否超过第四基准值,在停止时FFT数据的峰值超过第四基准值的情况下,判定为减速器有异常,或者判断第四基准值和停止时FFT数据的峰值之差是否超过规定的第四允许值,在第四基准值和停止时FFT数据的峰值之差超过第四允许值的情况下,判定为减速器有异常。
在本发明中,优选为管理装置进行第一数据处理、第二数据处理、第三数据处理及第四数据处理。等速时统计处理数据、等速时FFT数据的峰值、停止时统计处理数据及停止时FFT数据的峰值中哪个值容易随着时间的经过而变化根据减速器的构造等而不同,但是如果这样构成,则能够从各种观点出发来判定减速器是否有因经年劣化而引起的异常。因此,能够进一步提高判定减速器是否有因经年劣化而引起的异常的判定精度。
在本发明中,优选为管理装置在进行等速时转矩数据提取处理时,提取在获取处理中获取到的转矩数据中的伺服电动机以等速旋转时的部分、即此时的伺服电动机的旋转量超过规定的基准量的部分,以作为等速时转矩数据。如果这样构成,则能够提取更加有效的等速时转矩数据,以作为用于判定减速器是否有因经年劣化而引起的异常的等速时转矩数据,其结果是,可以使用更加有效的等速时转矩数据,来判定减速器是否有因经年劣化而引起的异常。
在本发明中,管理装置也可以在进行等速时转矩数据提取处理时,提取在获取处理中获取到的转矩数据中的伺服电动机以等速旋转时的部分、即此时的伺服电动机的转速超过规定的基准速度的部分,以作为等速时转矩数据。这种情况下,也能提取更加有效的等速时转矩数据,以作为用于判定减速器是否有因经年劣化而引起的异常的等速时转矩数据,其结果是,可以使用更加有效的等速时转矩数据,来判定减速器是否有因经年劣化而引起的异常。
在本发明中,优选为管理装置在进行停止时转矩数据提取处理时,提取在获取处理中获取的转矩数据中的伺服电动机停止时的部分、即此时的伺服电动机的停止时间超过规定的基准时间的部分,以作为停止时转矩数据。如果这样构成,则能够提取更加有效的停止时转矩数据,以作为用于判定减速器是否有因经年劣化而引起的异常的停止时转矩数据,其结果是,可以使用更加有效的停止时转矩数据,来判定减速器是否有因经年劣化而引起的异常。
发明效果
如上所述,在本发明中,在具备具有伺服电动机及连接伺服电动机的减速器的工业用机器人的机器人系统中,能够提高判定减速器是否有因经年劣化而引起的异常的判定精度。
附图说明
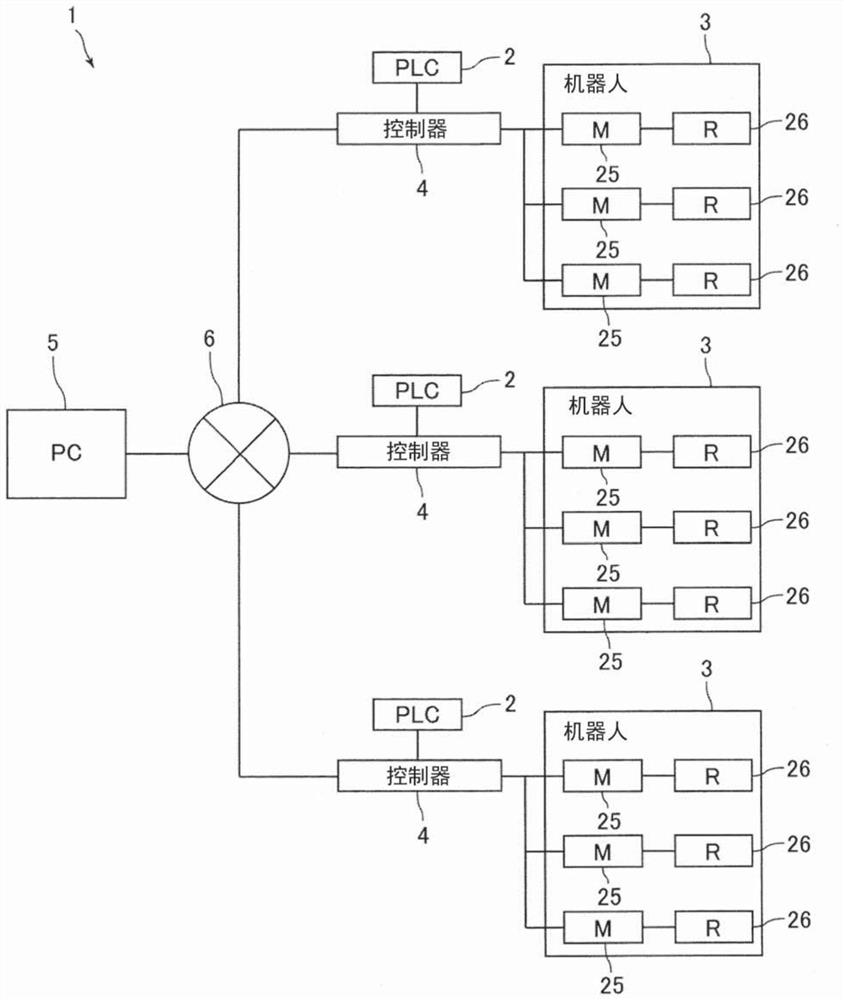
图1是本发明实施方式所涉及的机器人系统的系统结构图。
图2是图1所示的工业用机器人的俯视图。
图3是图2所示的工业用机器人的侧视图。
图4是用于说明图1所示的管理装置从控制器获取的转矩数据的图。
图5是图1所示的管理装置进行的第一数据处理及后续处理的流程图。
图6是图1所示的管理装置进行的第二数据处理及后续处理的流程图。
图7是图1所示的管理装置进行的第三数据处理及后续处理的流程图。
图8是图1所示的管理装置进行的第四数据处理及后续处理的流程图。
具体实施方式
下面,参照附图,对本发明的实施方式进行说明。
(机器人系统的整体结构)
图1是本发明实施方式所涉及的机器人系统1的系统结构图。图2是图1所示的工业用机器人3的俯视图。图3是图2所示的工业用机器人3的侧视图。
本实施方式的机器人系统1具备上位装置2、与从上位装置2发送的指令相对应地动作的工业用机器人3(下面设为“机器人3”。)、从上位装置2接收指令来控制机器人3的控制器4以及连接控制器4的管理装置5。控制器4连接至上位装置2。机器人3连接至控制器4。另外,控制器4经由网络6连接至管理装置5。
本实施方式的机器人系统1具备多台机器人3,在机器人系统1中,多台机器人3由一台共同的管理装置5来管理。控制器4设置于多台机器人3中的每一台。上位装置2设置于多台控制器4中的每一台。即,机器人系统1具备与机器人3同数量的控制器4及上位装置2。多台控制器4经由网络6连接至管理装置5。
此外,在图1所示的例子中,三台机器人3由一台管理装置5来管理,但是被一台管理装置5管理的机器人3的台数可以为两台,也可以为四台以上。另外,被一台管理装置5管理的机器人3的台数也可以为一台。另外,多台控制器4也可以连接至一台共同的上位装置2。
机器人3是搬运液晶显示器等中使用的玻璃基板9(下面,设为“基板9”。)的水平多关节型机器人。机器人3具备搭载基板9的两只手10、两只手10分别连接至前端侧的两条臂11、支承两条臂11的主体部12以及以能够沿水平方向移动的方式支承主体部12的基座构件13。此外,机器人3也可以搬运基板9以外的搬运对象物。例如,机器人3也可以搬运半导体晶片。
主体部12具备对臂11的基端侧进行支承且可升降的臂支撑件15、以可升降的方式支承臂支撑件15的支承框架16、构成主体部12的下端部分并且能够相对于基座构件13水平移动的基台17、以及固定支承框架16的下端并且能够相对于基台17转动的旋转框架18。
臂11由第一臂部20和第二臂部21这两个臂部构成。第一臂部20的基端侧以能够转动的方式连接至臂支撑件15。第二臂部21的基端侧以能够转动的方式连接至第一臂部20的前端侧。手10以能够转动的方式连接至第二臂部21的前端侧。臂11能够沿水平方向伸缩以使手10在朝向恒定方向的状态下大致线性地移动。此外,臂11也可以由三个以上的臂部构成。
支承框架16经由臂支撑件15将手10及臂11保持为能够升降。支承框架16具备将臂支撑件15保持为能够升降的柱状的第一支承框架22和将第一支承框架22保持为能够升降的柱状的第二支承框架23。旋转框架18形成为细长的大致长方体状。第二支承框架23的下端部固定在旋转框架18的前端侧的上表面。旋转框架18的基端侧被基台17所支承,以使得能够进行以上下方向为转动的轴向的转动。旋转框架18配置为比基台17更靠上侧。
机器人3通过臂11的伸缩动作和臂11等的升降动作、转动动作及水平移动动作的组合来搬运基板9。机器人3具备用于使机器人3动作的多台伺服电动机25(下面,设为“电动机25”。)和用于检测电动机25的旋转量的编码器(省略图示)。基于编码器的检测结果来控制电动机25。另外,机器人3具备连接电动机25的减速器26。具体而言,机器人3具备多个减速器26,多个电动机25分别与多个减速器26中的每一个相连接。减速器26使电动机25的动力减速地传递。
上位装置2是PLC(Programmable Logic Controller:可编程逻辑控制器)。上位装置2将机器人3的指令(动作指令)发送到控制器4。具体而言,上位装置2将多个电动机25各自的指令发送到控制器4。此外,上位装置2也可以是个人计算机(PC)。
控制器4从上位装置2接收指令来控制电动机25。本实施方式中,一台机器人3具有的多个电动机25连接至控制器4,控制器4控制一台机器人3具有的所有电动机25。电动机25与从上位装置2发送的指令相对应地旋转。另外,控制器4从机器人3实时获取各种数据,并与从上位装置2获取的指令一起发送到管理装置5。
管理装置5例如是通用的个人计算机(PC)。管理装置5具备由CPU、MPU、GPU、DSP及ASIC等构成的控制部、由RAM、ROM、HDD及闪存等构成的存储部、液晶显示装置等显示部、以及键盘和鼠标等输入部。另外,管理装置5具备用于与外部设备或网络6连接的接口。管理装置5从控制器4获取各种数据,并执行各种处理。下面,对管理装置5中进行的处理进行说明。
(管理装置中进行的处理的概要)
图4是用于说明图1所示的管理装置5从控制器4获取的转矩数据的图。
如上所述,管理装置5从控制器4获取各种数据。在管理装置5从控制器4获取的数据中,包含电动机25的转矩数据和从上位装置2接收到的指令。即,管理装置5进行从控制器4获取电动机25的转矩数据和指令的获取处理。在获取处理中,管理装置5与此时的指令一起获取在基板9的搬运工序中机器人3反复进行的动作中的、机器人3进行转矩监视用的特定动作时的电动机25的转矩数据。
例如,在获取处理中,管理装置5与此时的指令一起获取机器人3进行将基板9放置于规定位置的动作时的电动机25的转矩数据或机器人3进行从规定位置拾取基板9的动作时的电动机25的转矩数据。另外,在获取处理中,管理装置5获取多台机器人3具有的所有电动机25的转矩数据。此外,在获取处理中,管理装置5从控制器4实时获取电动机25的转矩数据。如图4所示,可以将在获取处理中管理装置5获取的转矩数据表示为以横轴为时间、以纵轴为转矩值的曲线图。
如图4所示,在获取处理中管理装置5获取的转矩数据中,包含电动机25等速旋转时的转矩数据即“等速时转矩数据”以及电动机25停止时的转矩数据即“停止时转矩数据”。另外,在管理装置5获取的转矩数据中,包含电动机25加速时的转矩数据以及电动机25减速时的转矩数据。此外,在本说明书中,“停止时转矩数据”并非电流向电动机25的驱动用线圈的供给停止的状态下电动机25停止时的电动机25的转矩数据,而是指电动机25的驱动用线圈在通电状态下电动机25停止时的电动机25的转矩数据。
另外,在获取处理中管理装置5从控制器4获取的数据中包含电动机25的位置数据和电动机25的速度(转速)数据。电动机25的位置数据是连接至电动机25的编码器的脉冲值。另外,在获取处理中管理装置5获取的电动机25的转速是连接至电动机25的编码器的每秒钟的脉冲数(脉冲/秒)。
若将提取在获取处理中获取到的转矩数据中的电动机25以等速旋转时的部分的等速时转矩数据的处理设为等速时转矩数据提取处理,将进行等速时转矩数据的统计处理并计算基于等速时转矩数据的最大值、最小值、平均值、中间值、标准偏差及方差中的至少任一个的等速时统计处理数据的处理设为等速时统计处理,将进行等速时转矩数据的FFT处理(快速傅立叶变换)来求出等速时FFT数据的处理设为等速时FFT处理,则管理装置5在获取处理之后,进行包含等速时转矩数据提取处理和等速时统计处理的第一数据处理、以及包含等速时转矩数据提取处理和等速时FFT处理的第二数据处理。
另外,若将提取在获取处理中获取的转矩数据中的电动机25停止时的部分的停止时转矩数据的处理设为停止时转矩数据提取处理,将进行停止时转矩数据的统计处理并计算基于停止时转矩数据的最大值、最小值、平均值、中间值、标准偏差及方差中的至少任一个的停止时统计处理数据的处理设为停止时统计处理,将进行停止时转矩数据的FFT处理来求出停止时FFT数据的处理设为停止时FFT处理,则管理装置5在获取处理之后,进行包含停止时转矩数据提取处理和停止时统计处理的第三数据处理、以及包含停止时转矩数据提取处理和停止时FFT处理的第四数据处理。
(第一数据处理及后续处理)
图5是图1所示的管理装置5进行的第一数据处理及后续处理的流程图。
在进行第一数据处理时,管理装置5首先进行等速时转矩数据提取处理,接着进行等速时统计处理,之后进一步进行规定的处理。具体而言,在进行第一数据处理时,如图5所示,管理装置5首先基于在获取处理中获取到的电动机25的速度数据,取出在获取处理中获取到的转矩数据中的电动机25以等速旋转时的部分(步骤S1)。之后,管理装置5计算在步骤S1中获得的部分的电动机25的旋转量(即、等速旋转时的电动机25的旋转量)(步骤S2)。
在本实施方式中,在步骤S2中,管理装置5基于在获取处理中获取到的电动机25的位置数据(编码器的脉冲值),来计算电动机25以等速旋转时的机器人3的动作距离,从而间接地计算等速旋转时的电动机25的旋转量。在步骤S2中,管理装置5将电动机25开始等速旋转时的编码器的脉冲值和电动机25结束等速旋转时的编码器的脉冲值发送到控制器4,并从控制器4取出此时的机器人3的坐标数据,并且基于从控制器4取出的坐标数据来计算电动机25以等速旋转时的机器人3的动作距离。
之后,管理装置5判断在步骤S2中计算出的机器人3的动作距离是否超过规定的基准距离(步骤S3)。在步骤S3中,在机器人3的动作距离超过规定的基准距离的情况下(例如,在作为对象的动作是使主体部12沿水平方向移动的动作且主体部12向水平方向的移动量超过1(m)的情况下),管理装置5将在步骤S1中取出的部分的数据确定为等速时转矩数据,并将其作为等速时转矩数据来提取(步骤S4)。即,在间接地计算的等速旋转时的电动机25的旋转量超过规定的基准量的情况下,管理装置5将在步骤S1中取出的部分的数据确定为等速时转矩数据,并作为等速时转矩数据来提取。
之后,管理装置5将在步骤S2中计算出的机器人3的动作距离除以电动机25等速旋转时的时间,来计算机器人3的动作速度(步骤S5)。即,在步骤S5中,管理装置5通过计算机器人3的动作速度来间接地计算电动机25的转速。在步骤S5中计算的机器人3的动作速度是机器人3每秒钟的动作距离(mm/秒)。
另一方面,在步骤S3中,在机器人3的动作距离为规定的基准距离以下的情况下,管理装置5判断为在步骤S1中取出的部分的数据不足以作为等速时转矩数据,放弃在步骤S1中取出的部分的数据(步骤S6),并返回步骤S1。
由此,管理装置5在进行等速时转矩数据提取处理时,提取在获取处理中获取到的转矩数据中的电动机25以等速旋转时的部分、即此时的机器人3的动作距离超过规定的基准距离的部分,以作为等速时转矩数据。即,管理装置5在进行等速时转矩数据提取处理时,提取在获取处理中获取到的转矩数据中的电动机25以等速旋转时的部分、即此时的电动机25的旋转量超过规定的基准量的部分,以作为等速时转矩数据。
之后,管理装置5进行等速时统计处理(步骤S7)。即,在步骤S7中,管理装置5进行等速时转矩数据的统计处理并计算基于等速时转矩数据的最大值、最小值、平均值、中间值、标准偏差及方差中的至少任一个的等速时统计处理数据。
在等速时统计处理中算的等速时统计处理数据是等速时转矩数据的最大值、最小值、平均值、中间值、标准偏差及方差中的至少任一个数据本身、和/或使用等速时转矩数据的最大值、最小值、平均值、中间值、标准偏差及方差中的至少任一个来计算的一个或多个数据,等速时统计处理数据由一种或多种数据构成。例如,等速时统计处理数据由等速时转矩数据的最大值、最小值、平均值、标准偏差及方差这五种数据构成。针对多台电动机25中的每一台单独地计算等速时统计处理数据。
之后,管理装置5将等速时统计处理数据和指令相关联地保存(步骤S8)。具体而言,在步骤S8中,管理装置5将指令和与基于该指令进行的动作对应的等速时统计处理数据、与电动机25(提取出成为等速时统计处理数据源的等速时转矩数据的电动机25)相关联地保存。之后,管理装置5判断等速时统计处理数据是否超过根据上述步骤S5中计算出的机器人3的动作速度(即、电动机25的转速)和指令设定的第一基准值(步骤S9)。
第一基准值根据机器人3的每个动作速度,且根据每个指令来设定。另外,在等速时统计处理数据由多种数据构成的情况下,根据机器人3的动作速度和指令,针对多种数据中的每一种设定第一基准值。例如,在等速时统计处理数据由等速时转矩数据的最大值、最小值、平均值、标准偏差及方差这五种数据构成的情况下,根据机器人3的动作速度和指令,设定最大值的第一基准值、最小值的第一基准值、平均值的第一基准值、标准偏差的第一基准值及方差的第一基准值。此外,可以在机器人系统1开始工作前预先设定第一基准值,也可以在机器人系统1开始工作并经过规定时间后更新第一基准值。
在步骤S9中,在等速时统计处理数据超过第一基准值的情况下,管理装置5判定为减速器26(具体而言,连接提取出成为超过第一基准值的等速时统计处理数据源的等速时转矩数据的电动机25的减速器26)有异常,进行规定的异常处理(步骤S10)。例如,在等速时统计处理数据由等速时转矩数据的最大值、最小值、平均值、标准偏差及方差这五种数据构成的情况下,在步骤S9中,如果等速时转矩数据的最大值、最小值、平均值、标准偏差及方差这五种数据中的至少任一个超过第一基准值,则在步骤S10中,管理装置5判定为减速器26有异常,并进行规定的异常处理。
由此,在进行第一数据处理时,管理装置5将第一基准值和等速时统计处理数据进行比较,并基于比较结果来判定减速器26有无异常。在步骤S10中,例如,管理装置5将错误数据发送到控制器4,控制器4将从管理装置5接收到的错误数据发送到上位装置2。接收到错误数据的上位装置2例如产生警报。或者,接收到错误数据的上位装置2经由控制器4使机器人3停止。此外,在管理装置5与控制管理装置5的上位装置相连接的情况下,在步骤S10中,管理装置5也可以将错误数据发送给该上位装置。
在步骤S10中,若管理装置5进行异常处理,则返回步骤S1。另外,在步骤S9中,即使在等速时统计处理数据为第一基准值以下的情况下,也返回步骤S1。例如,在等速时统计处理数据由等速时转矩数据的最大值、最小值、平均值、标准偏差及方差这五种数据构成的情况下,在步骤S9中,当等速时转矩数据的最大值、最小值、平均值、标准偏差及方差这五种数据均为第一基准值以下时,返回步骤S1。
(第二数据处理及后续处理)
图6是图1所示的管理装置5进行的第二数据处理及后续处理的流程图。
在进行第二数据处理时,管理装置5首先进行等速时转矩数据提取处理,接着进行等速时FFT处理,之后进一步进行规定的处理。具体而言,在进行第二数据处理时,如图6所示,与进行第一数据处理时同样地,管理装置5首先执行步骤S1~S6。另外,在进行第二数据处理时,管理装置5在步骤S5之后,进行等速时FFT处理(步骤S17)。即,在步骤S17中,管理装置5进行等速时转矩数据的FFT处理并求出等速时FFT数据。
之后,管理装置5将等速时FFT数据和指令相关联地保存(步骤S18)。具体而言,在步骤S18中,管理装置5将指令和与基于该指令进行的动作对应的等速时FFT数据、与电动机25(提取出成为等速时FFT数据源的等速时转矩数据的电动机25)相关联地保存。之后,管理装置5判断等速时FFT数据的峰值是否超过根据步骤S5中计算出的机器人3的动作速度(即、电动机25的转速)和指令设定的第二基准值(步骤S19)。第二基准值根据机器人3的每个动作速度,且根据每个指令来设定。此外,与第一基准值同样地,可以在机器人系统1开始工作前预先设定第二基准值,也可以在机器人系统1开始工作且经过规定时间后更新第二基准值。
在步骤S19中,在等速时FFT数据的峰值超过第二基准值的情况下,管理装置5判定为减速器26(具体而言,连接提取出成为峰值超过第二基准值的等速时FFT数据源的等速时转矩数据的电动机25的减速器26)有异常,与上述步骤S10同样地进行规定的异常处理。由此,在进行第二数据处理时,管理装置5将第二基准值和等速时FFT数据的峰值进行比较,并基于比较结果来判定减速器26有无异常。在步骤S10中,当管理装置5进行异常处理时,返回步骤S1。另外,在步骤S19中,在等速时FFT数据的峰值为第二基准值以下的情况下,也返回步骤S1。
(第三数据处理及后续处理)
图7是图1所示的管理装置5进行的第三数据处理及后续处理的流程图。
在进行第三数据处理时,管理装置5首先进行停止时转矩数据提取处理,接着进行停止时统计处理,之后,进一步进行规定的处理。具体而言,在进行第三数据处理时,如图7所示,管理装置5首先基于在获取处理中获取到的电动机25的速度数据,来取出获取处理中获取到的转矩数据中的电动机25停止时的部分(步骤S21)。之后,管理装置5计算在步骤S21中取出的部分的时间(电动机25的停止时间,即、机器人3的停止时间)(步骤S22)。
之后,管理装置5判断在步骤S22中计算出的电动机25的停止时间是否超过规定的基准时间(步骤S23)。在步骤S23中,在电动机25的停止时间超过规定的基准距离的情况下(例如,在电动机25的停止时间超过5秒钟的情况下),管理装置5将在步骤S21中取出的部分的数据确定为停止时转矩数据,并作为停止时转矩数据来提取(步骤S24)。另一方面,在步骤S23中,在电动机25的停止时间为规定的基准时间以下的情况下,管理装置5判断为在步骤S21中检索的部分的数据不足以作为停止时转矩数据,将在步骤S21中取出的部分的数据放弃(步骤S26),并返回步骤S21。
由此,管理装置5在进行停止时转矩数据提取处理时,提取在获取处理中获取到的转矩数据中的电动机25停止时的部分、即此时的电动机25的停止时间超过规定的基准时间的部分,以作为停止时转矩数据。
之后,管理装置5进行停止时统计处理(步骤S27)。即,在步骤S27中,管理装置5进行停止时转矩数据的统计处理并计算基于停止时转矩数据的最大值、最小值、平均值、中间值、标准偏差及方差中的至少任一个的停止时统计处理数据。
与在等速时统计处理中计算的等速时统计处理数据同样地,在停止时统计处理中计算的停止时统计处理数据是停止时转矩数据的最大值、最小值、平均值、中间值、标准偏差及方差中的至少任一个数据本身、和/或使用停止时转矩数据的最大值、最小值、平均值、中间值、标准偏差及方差中的至少任一个来计算的一个或多个数据,停止时统计处理数据由一种或多种数据构成。例如,停止时统计处理数据由停止时转矩数据的最大值、最小值、平均值、标准偏差及方差这五种数据构成。针对多台电动机25中的每一台单独地计算停止时统计处理数据。
之后,管理装置5将停止时统计处理数据和指令相关联地保存(步骤S28)。具体而言,在步骤S28中,管理装置5将指令和与基于该指令进行的动作对应的停止时统计处理数据、与电动机25(提取出成为停止时统计处理数据源的停止时转矩数据的电动机25)相关联地保存。之后,管理装置5判断停止时统计处理数据是否超过根据指令设定的第三基准值(步骤S29)。
针对每个指令设定第三基准值。另外,在停止时统计处理数据由多种数据构成的情况下,与第一基准值同样地,根据指令且针对多种数据中的每一种设定第三基准值。例如,在停止时统计处理数据由停止时转矩数据的最大值、最小值、平均值、标准偏差及方差这五种数据构成的情况下,根据指令来设定最大值的第一基准值、最小值的第一基准值、平均值的第一基准值、标准偏差的第一基准值及方差的第一基准值。此外,与第一基准值同样地,可以在机器人系统1开始工作前预先设定第三基准值,也可以在机器人系统1开始工作且经过规定时间后更新第三基准值。
在步骤S29中,在停止时统计处理数据超过第三基准值的情况下,管理装置5判定为减速器26(具体而言,连接提取出成为超过第三基准值的停止时统计处理数据源的停止时转矩数据的电动机25的减速器26)有异常,与上述步骤S10同样地进行规定的异常处理。例如,在停止时统计处理数据由停止时转矩数据的最大值、最小值、平均值、标准偏差及方差这五种数据构成的情况下,在步骤S29中,如果停止时转矩数据的最大值、最小值、平均值、标准偏差及方差这五种数据中的至少任一个超过第三基准值,则在步骤S10中,管理装置5进行规定的异常处理。
由此,在进行第三数据处理时,管理装置5对第三基准值和停止时统计处理数据进行比较,并基于比较结果来判定减速器26有无异常。在步骤S10中,当管理装置5进行异常处理时,返回步骤S21。另外,在步骤S29中,即使在停止时统计处理数据为第三基准值以下的情况下,也返回步骤S21。例如,在停止时统计处理数据由停止时转矩数据的最大值、最小值、平均值、标准偏差及方差这五种数据构成的情况下,在步骤S29中,在停止时转矩数据的最大值、最小值、平均值、标准偏差及方差这五种数据均为第三基准值以下的情况下,返回步骤S21。
(第四数据处理及后续处理)
图8是图1所示的管理装置5进行的第四数据处理及后续处理的流程图。
在进行第四数据处理时,管理装置5首先进行停止时转矩数据提取处理,接着进行停止时FFT处理,之后,进一步进行规定的处理。具体而言,在进行第四数据处理时,如图8所示,与进行第三数据处理时同样地,管理装置5首先执行步骤S21~S24、S26。另外,在进行第四数据处理时,管理装置5在步骤S24之后进行停止时FFT处理(步骤S37)。即,在步骤S37中,管理装置5进行停止时转矩数据的FFT处理并求出停止时FFT数据。
之后,管理装置5将停止时FFT数据和指令相关联地保存(步骤S38)。具体而言,在步骤S38中,管理装置5将指令和与基于该指令进行的动作对应的停止时FFT数据、与电动机25(提取出成为停止时FFT数据源的停止时转矩数据的电动机25)相关联地保存。之后,管理装置5判断停止时FFT数据的峰值是否超过根据指令设定的第四基准值(步骤S39)。针对每个指令设定第四基准值。此外,与第三基准值同样地,可以在机器人系统1开始工作前预先设定第四基准值,也可以在机器人系统1开始工作且经过规定时间后更新第四基准值。
在步骤S39中,在停止时FFT数据的峰值超过第四基准值的情况下,管理装置5判定为减速器26(具体而言,连接提取出成为峰值超过第四基准值的停止时FFT数据源的停止时转矩数据的电动机25的减速器26)有异常,与上述步骤S10同样地进行规定的异常处理。由此,在进行第四数据处理时,管理装置5对第四基准值和停止时FFT数据的峰值进行比较,并基于比较结果来判定减速器26有无异常。在步骤S10中,当管理装置5进行异常处理时,返回步骤S21。另外,在步骤S39中,即使在停止时FFT数据的峰值为第四基准值以下的情况下,也返回步骤S21。
(本实施方式的主要效果)
如以上说明的那样,在本实施方式中,管理装置5基于根据等速时转矩数据计算的等速时统计处理数据和第一基准值的比较结果,来判定减速器26有无异常,并且基于通过对等速时转矩数据进行FFT处理而求出的等速时FFT数据的峰值和第二基准值的比较结果,来判定减速器26有无异常。另外,在本实施方式中,管理装置5基于根据停止时转矩数据计算的停止时统计处理数据和第三基准值的比较结果,来判定减速器26有无异常,并且基于通过对停止时转矩数据进行FFT处理而求出的停止时FFT数据的峰值和第四基准值的比较结果,来判定减速器26有无异常。
即,在本实施方式中,管理装置5使用电动机25等速旋转的等速旋转时的转矩数据或电动机25停止的停止时的转矩数据,来判定减速器26有无异常。因此,在本实施方式中,能够提高判定减速器26是否有因经年劣化而引起的异常的判定精度。
在本实施方式中,管理装置5进行第一数据处理、第二数据处理、第三数据处理及第四数据处理这四种数据处理。因此,在本实施方式中,能够从各种观点出发来判定减速器26是否有因经年劣化而引起的异常。因此,在本实施方式中,能够进一步提高判定减速器26是否有因经年劣化引起的异常的判定精度。
在本实施方式中,管理装置5在进行等速时转矩数据提取处理时,提取在获取处理中获取到的转矩数据中的电动机25以等速旋转时的部分、即此时的电动机25的旋转量超过规定的基准量的部分,以作为等速时转矩数据。因此,在本实施方式中,能够提取更加有效的等速时转矩数据,以作为用于判定减速器26是否有因经年劣化而引起的异常的等速时转矩数据,其结果是,能够使用更加有效的等速时转矩数据,来判定减速器26是否有因经年劣化而引起的异常。
另外,在本实施方式中,在进行停止时转矩数据提取处理时,管理装置5提取在获取处理中获取到的转矩数据中的电动机25停止时的部分、即此时的电动机25的停止时间超过规定的基准时间的部分,以作为停止时转矩数据。因此,在本实施方式中,能够提取更加有效的停止时转矩数据,以作为用于判定减速器26是否有因经年劣化而引起的异常的停止时转矩数据,其结果是,能够使用更加有效的停止时转矩数据,来判定减速器26是否有因经年劣化而引起的异常。
(其它实施方式)
上述的实施方式仅为本发明的优选方式的一个示例,但并不限于此,在不变更本发明的主旨的范围内可以实施各种变形。
在上述实施方式中,管理装置5也可以在进行第一数据处理时,判断根据机器人3的动作速度和指令设定的第一基准值与等速时统计处理数据之差是否超过规定的第一允许值,在第一基准值和等速时统计处理数据之差超过第一允许值的情况下,判定为减速器26有异常。在这种情况下,与上述实施方式同样地,可以在机器人系统1开始工作前预先设定第一基准值,也可以在机器人系统1开始工作且经过规定时间后更新第一基准值。
另外,在上述实施方式中,管理装置5也可以在进行第一数据处理时,判断等速时统计处理数据是否从规定的上限值和下限值之间偏离,在等速时统计处理数据从规定的上限值和下限值之间偏离的情况下,判定为减速器26有异常。即,第一基准值也可以是由规定的上限值和下限值所规定的基准范围。
在上述实施方式中,管理装置5也可以在进行第二数据处理时,判断根据机器人3的动作速度和指令设定的第二基准值与等速时FFT数据的峰值之差是否超过规定的第二允许值,在第二基准值和等速时FFT数据的峰值之差超过第二允许值的情况下,判定为减速器26有异常。在这种情况下,可以在机器人系统1开始工作前预先设定第二基准值,也可以在机器人系统1开始工作且经过规定时间后更新第二基准值。
另外,在上述实施方式中,管理装置5也可以在进行第二数据处理时,判断等速时FFT数据的峰值是否从规定的上限值和下限值之间偏离,在等速时FFT数据的峰值从规定的上限值和下限值之间偏离的情况下,判定为减速器26有异常。即,第二基准值也可以是由规定的上限值和下限值所规定的基准范围。
在上述实施方式中,管理装置5也可以在进行第三数据处理时,判断根据指令设定的第三基准值和停止时统计处理数据之差是否超过规定的第三允许值,在第三基准值和停止时统计处理数据之差超过第三允许值的情况下,判定为减速器26有异常。在这种情况下,可以在机器人系统1开始工作前预先设定第三基准值,也可以在机器人系统1开始工作且经过规定时间后更新第三基准值。
另外,在上述实施方式中,管理装置5也可以在进行第三数据处理时,判断停止时统计处理数据是否从规定的上限值和下限值之间偏离,在停止时统计处理数据从规定的上限值和下限值之间偏离的情况下,判定为减速器26有异常。即,第三基准值也可以是由规定的上限值和下限值所规定的基准范围。
在上述实施方式中,管理装置5也可以在进行第四数据处理时,判断根据指令设定的第四基准值和停止时FFT数据的峰值之差是否超过规定的第四允许值,在第四基准值和停止时FFT数据的峰值之差超过第四允许值的情况下,判定为减速器26有异常。在这种情况下,可以在机器人系统1开始工作前预先设定第四基准值,也可以在机器人系统1开始工作且经过规定时间后更新第四基准值。
另外,在上述实施方式中,管理装置5也可以在进行第四数据处理时,判断停止时FFT数据的峰值是否从规定的上限值和下限值之间偏离,在停止时FFT数据的峰值从规定的上限值和下限值之间偏离的情况下,判定为减速器26有异常。即,第四基准值也可以是由规定的上限值和下限值所规定的基准范围。
在上述实施方式中,管理装置5也可以仅进行从第一数据处理、第二数据处理、第三数据处理及第四数据处理中任意选择的三个、两个、或仅一个数据处理。即使在这种情况下,也可以使用电动机25等速旋转时的转矩数据或电动机25停止时的转矩数据来判定减速器26有无异常,因此能够提高判定减速器26是否有因经年劣化而引起的异常的判定精度。
在上述实施方式中,管理装置5也可以在进行等速时转矩数据提取处理时,提取在获取处理中获取到的转矩数据中的电动机25以等速旋转时的部分、即此时的电动机25的转速超过规定的基准速度的部分,以作为等速时转矩数据。即使在这种情况下,也能够与上述的实施方式同样地提取更加有效的等速时转矩数据,以作为用于判定减速器26是否有因经年劣化而引起的异常的等速时转矩数据,其结果是,可以使用更加有效的等速时转矩数据,来判定减速器26是否有因经年劣化而引起的异常。
在上述实施方式中,管理装置5也可以在进行等速时转矩数据提取处理时,提取在获取处理中获取到的转矩数据中的电动机25以等速旋转时的部分、即此时的电动机25的旋转量为规定的基准量以下的部分,以作为等速时转矩数据。另外,在上述实施方式中,管理装置5也可以在进行停止时转矩数据提取处理时,提取在获取处理中获取到的转矩数据中的电动机25停止时的部分、即此时的电动机25的停止时间为规定的基准时间以下的部分,以作为停止时转矩数据。
标号说明
1:机器人系统;
2:上位装置;
3:机器人(工业用机器人);
4:控制器;
5:管理装置;
25:电动机(伺服电动机);
26:减速器;
S1~S4、S6:等速时转矩数据提取处理;
S1~S4、S6、S7:第一数据处理;
S1~S4、S6、S17:第二数据处理;
S7:等速时统计处理;
S17:等速时FFT处理;
S21~S24、S26:停止时转矩数据提取处理;
S21~S24、S26、S27:第三数据处理;
S21~S24、S26、S37:第四数据处理;
S27:停止时统计处理;
S37:停止时FFT处理。
- 机器人系统、机器人系统的机器人管理计算机和机器人系统的管理方法
- 一种机器人系统的控制单元、机器人系统及机器人系统的控制方法