一种高负载关节型砖坯码垛机器人
文献发布时间:2023-06-19 11:09:54
技术领域
本发明属于机械设备技术领域,具体涉及一种高负载关节型砖坯码垛机器人。
背景技术
人工费持续高涨对我国砖瓦行业的冲击是非常大的,主要表现在码坯和卸砖这两个用人量大的方面。生产线的产量越高,需要的人员就越多,从而砖厂的招工成为一件困难的事情。现在,不但新建的生产线优先考虑自动码坯的方式,而且许多依靠人工码坯的传统砖厂也不得不进行技术改造,以解决用工难的问题。
目前,我国全自动码垛、搬运设备主要依靠进口,国产设备生产厂家相对较少,产品质量良莠不一,搬运机器人技术没有特别成熟。传统的砖坯自动化码垛作业大部分是由直角坐标式码垛机完成,直角坐标式码垛机由于其结构等因素的限制,存在着占地面积大、耗电量大等缺点。而且国内现有的一些关节型码垛机器人只能完成小负载的自动码垛,且码垛精度比较低,很难满足砖厂对自动码垛设备工作载荷大、码垛精度高的要求。
由此可见,研发工作载荷大,码垛精度高,结构紧凑,灵活性大,占地面积小,工作空间大的高负载关节型砖坯码垛机器人,成为本领域技术人员亟待解决的技术课题。
发明内容
本发明的目的是为了解决现有技术中的问题,而提出的一种高负载关节型砖坯码垛机器人。本发明能够实现砖坯等重型货物的自动抓取、搬运等动作,而且具有较高的码垛精度和较快的搬运速度以及较高的承载能力。
为了实现上述目的,本发明采用了如下技术方案:
一种高负载关节型砖坯码垛机器人包括底座、腰部回转机构、平衡缸机构、臂部机构、腕部机构等。
所述底座整体为法兰状,通过螺栓固定在地面或工作台上。与腰部轴承座通过均匀分布的螺栓连接固定。
所述腰部机构包括腰部驱动装置、腰部轴承座、推力轴承、动力输出轴和转盘。腰部驱动装置包括腰部交流伺服电机和腰部减速器,腰部交流伺服电机通过键联接连接腰部减速器,腰部减速器采用端面法兰联接形式与动力输出轴连接,动力输出轴通过平键联接带动转盘做回转运动,腰部轴承座通过推力轴承为转盘的运动提供支撑,同时腰部轴承座与底座通过均布的螺栓连接,大臂轴承座和平衡缸支架通过螺栓固定在腰部转盘上,其余各部分间接的安装于腰部机构上。
所述平衡缸机构是一种拉杆式单杆活塞缸,平衡缸支架一端通过螺栓铰接在大臂轴承座上,另一端通过螺栓铰接在臂部关节轴上。平衡缸位于支架中间位置,且缸体与活塞杆均分别连接一个带孔滑块。大臂轴承座支架由通过活塞杆滑块的四根连杆与缸体滑块通过螺栓固定,臂部关节平衡杠支架由通过缸体滑块的四根连杆与活塞杆滑块通过螺栓固定。
所述臂部机构包括大臂部分和小臂部分:
大臂部分包括大臂回转机构、竖拉杆和大臂主臂,大臂回转支承机构包括大臂轴承座、大臂减速器和大臂交流伺服电机,大臂交流伺服电机通过键联接连接到大臂减速器,大臂减速器与联接压盖固定连接,联接压盖固定安装于大臂主臂上,并通过传动键将动力传递给大臂传动轴,大臂传动轴再通过传动键把驱动力传递给大臂主臂另一侧的大臂压盖,大臂压盖固定安装于大臂主臂上,大臂主臂的上端与小臂回转支撑机构通过两排螺栓固定连接,大臂轴承座与腰部转盘通过螺栓连接固定,大臂主臂结构采用空心的薄壁矩形框体结构,由低合金高强度结构钢的钢板焊接制成,竖拉杆在工作过程中始终与大臂平行,竖拉杆上端与小臂部分的摇臂左端铰接,下端与平衡杆支架铰接,在整个工作过程中与平衡杠机构起支撑作用。
小臂部分包括小臂回转支撑机构、摇臂、横拉杆和小臂主臂,小臂回转支撑机构包括小臂轴承座、小臂减速器和小臂交流伺服电机,小臂回转支承机构与大臂回转支撑机构结构相似,小臂回转支撑机构下端与大臂主臂上端用螺栓连接,小臂主臂结构与大臂主臂结构类似,也是采用空心的薄壁矩形框体结构,横拉杆与小臂主臂平行,其前端与腕部机构的上盖铰接,后端与摇臂右端铰接,整个臂部部分组成腕部姿态调整机构,使得机器人工作时保持腕部安装座始终水平,即运动时机器人末端执行器的工作位姿始终保持不变。
所述腕部机构包括腕部驱动装置、腕部输出轴、减速器座、上盖和腕部压盖,腕部驱动装置是对地垂直安装的一个腕部减速器和腕部交流伺服电动机,腕部交流伺服电机与腕部减速器通过传动键联接,腕部交流伺服电机通过螺栓固定在上盖上端,上盖具有较强的承载能力,上盖的上端和左端分别与横拉杆右端和小臂主臂的小端铰接,连同摇臂一起构成平行四边形连杆机构,减速器座与上盖通过均布的螺栓联接,腕部减速器与腕部输出轴采用端面法兰联接形式固定,角接触球轴承与减速器座通孔过盈配合,通过腕部输出轴的轴肩和腕部压盖定位,为腕部输出轴提供支撑,腕部压盖通过六个均布螺栓与减速器座联接固定。
其中,所述腰部驱动装置、大臂回转支承机构、小臂回转支撑机构和腕部驱动装置中所涉及的减速器均为摆线针轮减速机。
工作使用时,腰部驱动装置将扭矩传给腰部动力输出轴,动力输出轴通过键连接将动力传给转盘,从而带动平衡缸机构、臂部机构、腕部机构做出相应的转动;与此同时,臂部机构在大臂回转支撑机构、和小臂回转支撑机构的作用下,做俯仰、旋转、升降和伸缩等动作,腕部驱动装置将扭矩传给腕部输出轴,腕部输出轴将扭矩传给末端执行器,以实现其的转动,由大臂主臂、竖拉杆、平衡缸、摇臂、小臂主臂、横拉杆、上盖组成的两个平行四边形连杆机构使得机器人运动时保持腕部安装座始终水平。
与现有技术相比,本发明的优点在于:
大臂主臂和小臂主臂结构采用焊接而成的空心的薄壁矩形框体结构,可以增强其结构强度,减轻重量,进而减少了驱动装置的负荷和运转时产生的动载荷与冲击,能够提高手臂运动的响应速度,而且焊接件结构简单,取材方便,成本低,焊接操作技术易于掌握,容易实现机械化和自动化。
腕部主体部件采用铸造制成,具有较强的承载能力,提高了传动的刚度,传动路线简单减少了机械传动系统中由于间隙产生的反转回差。
本发明的平衡缸采用拉杆式单杆活塞缸平衡方式,通过平衡缸两侧的支架连接到大臂轴承座与臂部回转机构上,起到了平衡竖拉杆拉力与提高承载能力的作用。
本发明结构紧凑、灵活性大、占地面积小,有利于车间的良好布局,大部分零件采用焊接和铸造制成,便于生产制造,与现有码垛机械手相比,能够码垛重载货物,码垛精度高。
附图说明
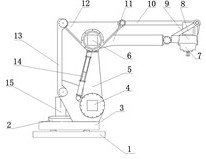
图1是本发明所述的关节型砖坯码垛机器人结构示意图;
图2是本发明所述的关节型坯码垛机器人腰部结构示意图;
图3是本发明所述的关节型坯码垛机器人大臂回转支撑结构示意图;
图4是本发明所述的关节型坯码垛机器人小臂回转支撑结构示意图;
图5是本发明所述的关节型坯码垛机器人腕部机构结构示意图。
附图标记:1、底座;2、腰部驱动装置;201、腰部交流伺服电机;202、腰部减速器;3、转盘;4、大臂回转支承机构;401、大臂交流伺服电机;402、大臂减速器;403、大臂轴承座;5、大臂主臂;6、小臂回转支承机构;601、小臂交流伺服电机;602、小臂减速器;603、小臂轴承座;7、减速器座;8、腕部驱动装置;801、腕部交流伺服电机;802、腕部减速器;9、上盖;10、横拉杆;11、小臂主臂;12、摇臂;13、竖拉杆;14、平衡缸装置;15、腰部电机;16、动力输出轴;17、腰部轴承座;18、推力轴承;19、联接压盖;20、大臂压盖;21、大臂传动轴;22、联接盘;23、小臂压盖;24、小臂传动轴;25、腕部输出轴;26、角接触球轴承; 27、腕部压盖。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
本发明所述高负载关节型砖坯码垛机器人工作结构如图1所示,底座1为码垛机器人的安装载体,通过螺栓连接固定于地基基础上,并与腰部轴承座17通过螺栓连接固定。臂部机构由大臂部分和小臂部分组成,大臂部分包括大臂回转支撑机构4、竖拉杆13和大臂主臂5,平衡缸装置14是一种拉杆式单杆活塞缸,平衡缸支架一端通过螺栓铰接在大臂轴承座403上,另一端通过螺栓铰接在臂部关节轴上。平衡缸位于支架中间位置,且缸体与活塞杆均分别连接一个带孔滑块。
如图2所示,腰部机构包括腰部驱动装置2、腰部轴承座17、推力轴承18、动力输出轴16和转盘3,腰部驱动装置2包括腰部交流伺服电机201和腰部减速器202,腰部交流伺服电机201通过键联接连接腰部减速器202,腰部减速器202采用端面法兰联接形式与动力输出轴16连接,动力输出轴16通过平键联接带动转盘3做回转运动,腰部轴承座17通过推力轴承18为转盘3的运动提供支撑,同时腰部轴承座17与底座1通过均布的螺栓连接,大臂轴承座403和平衡缸支架15通过螺栓固定在腰部转盘上,其余各部分间接的安装于腰部机构上。
如图3所示,大臂回转支承机构4包括大臂轴承座403、大臂减速器402和大臂交流伺服电机401,大臂交流伺服电机401通过键联接连接大臂减速器402,大臂减速器402采用端面法兰联接形式与联接压盖19固定连接,联接压盖19采用法兰联接形式固定安装于大臂主臂5上,并通过传动键将动力传递给大臂传动轴21,大臂传动轴21再通过传动键把驱动力传递给大臂主臂另一侧的大臂压盖20,大臂压盖20采用法兰联接形式固定安装于大臂主臂5上,以此减少单侧驱动运转时产生的动载荷与冲击,大臂主臂5的上端与小臂回转支撑机构通过两排螺栓固定连接,每排四个均布排列。
如图4所示,小臂回转支撑机构6包括小臂轴承座603、小臂减速器602和小臂交流伺服电机601,小臂回转支承机构6与大臂回转支撑机构4结构相似,小臂减速器602采用端面法兰联接形式与联接盘22固定连接,联接盘22采用法兰联接形式固定安装于小臂主臂11上,并通过传动键将动力传递给小臂传动轴24,小臂传动轴24再通过传动键把驱动力传递给小臂主臂另一侧的小臂压盖23,小臂部分还包括摇臂12、横拉杆10和小臂主臂11。如图1所示,摇臂12右端与横拉杆10左端铰接,左端与竖拉杆13上端铰接,中间与小臂回转支撑机构6螺栓固定连接;竖拉杆13下端与平衡杆支架15铰接,竖拉杆13在工作过程中始终与大臂主臂5平行,横拉杆10与小臂主臂11始终平行,其右端与腕部机构的上盖9铰接。
如图5所示,腕部机构包括腕部驱动装置8、腕部输出轴25、减速器座7、上盖9和腕部压盖27,腕部驱动装置8是对地垂直安装的一个腕部减速器802和腕部交流伺服电动机801,腕部交流伺服电机801与腕部减速器802通过传动键联接,腕部交流伺服电机802通过四个均布的螺栓固定在上盖9上端;如图1所示,上盖9的上端和左端分别与横拉杆10右端和小臂主臂11的小端铰接,连同摇臂12一起构成平行四边形连杆机构,减速器座7与上盖9通过十二个均布的螺栓联接,腕部减速器802与腕部输出轴25采用端面法兰联接形式固定,角接触球轴承26与减速器座7通孔过盈配合,通过腕部输出轴25的轴肩和腕部压盖27定位,为腕部输出轴25提供支撑,腕部压盖27通过六个均布螺栓与减速器座7联接固定。
整个机构构成两个平行四边形连杆机构,两个平行四边形连杆机构和摇臂(三运动副杆)组成腕部姿态调整机构,使得机器人工作时保持腕部安装座始终水平,即运动时机器人末端执行器的工作位姿始终保持不变。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种高负载关节型砖坯码垛机器人
- 一种高负载关节型砖坯码垛机器人