新型胃镜治疗磁控机器人
文献发布时间:2023-06-19 11:11:32
技术领域
本发明创造涉及一种新型胃镜治疗磁控机器人,用于磁体胶囊的外部控制,属于于医疗检测器械技术领域。
背景技术
新型胃镜治疗磁控机器人是一种磁控胃镜胶囊的体外控制设备,目前胃镜检测主要是传统的插管检查,对于一些特殊部位,无法进行更好的检测,而且传统胃镜插管对于病人感受不好,容易引起干呕,伤到食道和胃部,如果采用麻药方式,则对身体有一定损伤;目前,市面上有一些胶囊式检测方法,提高了病人的可接受度,但是出现了滞留现象,胶囊无法及时排除体外,还需要手术取出,增加了病人的痛苦,而且检测是根据胃部蠕动驱动胶囊前进,有些病变处还是无法发现,后来市面上有出现了磁铁胶囊,配套体外控磁设备,使胶囊可以在胃内旋转,方便医生查看更多胃部状况,但是目前市面上的体外控磁设备是病人躺着进行检查,并进行控磁操作,设备占地面积大,机构复杂,传动机构多,进而影响了动作精度,进而增加了设备成本,影响了控磁设备的普及和应用。
发明内容
本发明创造要解决的技术问题是提供一种新型胃镜治疗磁控机器人,该机器人结构合理,占用空间小,定位准确的操控磁体胶囊,有效解决当前医疗胶囊检测机器人产品结构复杂、成本高昂等问题。
为解决以上问题,本发明创造的具体技术方案如下:一种新型胃镜治疗磁控机器人,在底座上通过回转机构连接转盘,在回转机构的中心轴处设置升降机构,升降机构的顶面设置座椅;在转盘上表面对称设有支撑铝型材,两个支撑铝型材的竖直轴线与升降机构的中轴线在同一个竖直面内;支撑铝型材的上端部连接磁铁旋转机构。
所述的回转机构的具体结构为,在底座上圆周均布有四个回转轴承,转盘的圆周与回转轴承配合,转盘的中心形成回转旋转轴;在底座的中心固定连接回转同步带轮Ⅰ,在转盘非圆心处设有回转同步带轮Ⅱ,回转同步带轮Ⅰ与回转同步带轮Ⅱ通过皮带连接,在回转同步带轮Ⅱ的回转轴上连接电机加速机。
所述的升降机构是由伺服电机和蜗轮蜗杆丝杠结构的升降减速机组成,升降减速机的底座固定在转盘的中心,升降减速机的升降部通过升降轴连接座椅。
所述的磁铁旋转机构结构为,在支撑铝型材的顶部设有磁控减速机,磁控减速机的输出轴连接磁控同步带轮Ⅰ;在支撑铝型材的顶部连接水平梁,水平梁上设有磁铁机构,磁铁机构的中心转轴两端通过轴承座与水平梁连接,在中心转轴的端部设有磁控同步带轮Ⅱ,磁控同步带轮Ⅰ与磁控同步带轮Ⅱ通过皮带连接运行。
一种上述机器人进行胃镜治疗的控制方法:病人坐在新型胃镜治疗磁控机器人的座椅上,然后吞服胶囊;医生调整升降机构,将病人的胃调到磁铁旋转机构中间;然后调整磁铁旋转机构旋转,使胶囊对到胃部病灶位置,或者旋转回转机构,使胶囊在胃部翻转,以扩大医生的观察范围,当医生操作完成后,人工取出胶囊,并将胃镜治疗磁控机器人复位,等待下次使用。
该新型胃镜治疗磁控机器人通过回转机构、升降机构和磁铁旋转机构的三个方向的运转配合,实现对座椅上患者的体位进行变换,从而使磁铁旋转机构中的两个磁铁与人体内的磁体胶囊位置对应,并利用两个磁铁的磁力线偏转控制人体内的磁体胶囊运行,提高了胃镜的治疗效率。
回转机构采用非圆心驱动,圆心处采用固定的回转同步带轮Ⅰ,并通过非圆心的回转同步带轮Ⅱ进行驱动,避免了与升降机构的干涉,保证各机构独立运行。
升降机构采用伺服电机驱动蜗轮蜗杆丝杠升降减速机结构,保证升降机构结构紧凑,运行平稳。
磁铁旋转机构对称设置在座椅两侧,保证磁铁可以旋转,实现磁力线的偏转。
本申请的机器人进行胃镜治疗的控制方法,实现了患者处于坐姿即可进行胃镜治疗,节省了设备的占用空间,设备的三轴联动,使医生的观察范围更广,提高治疗效率。
附图说明
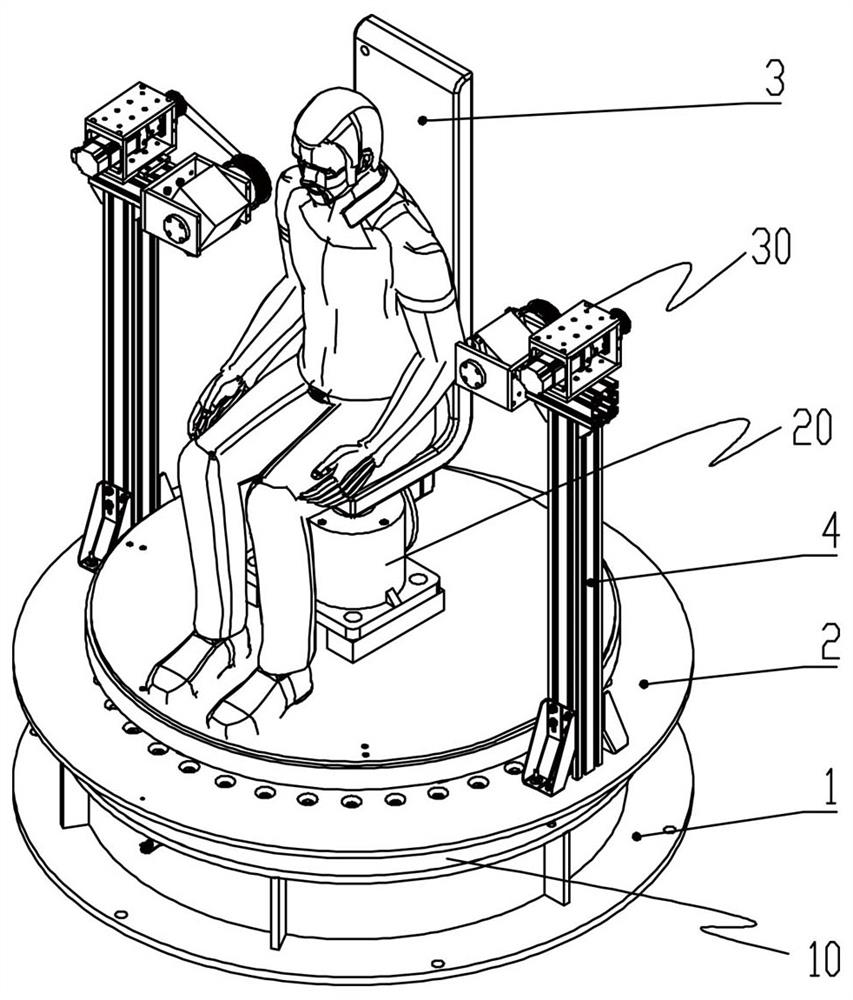
图1为新型胃镜治疗磁控机器人的轴测图。
图2为新型胃镜治疗磁控机器人的主视图。
图3为新型胃镜治疗磁控机器人的侧视图(磁铁旋转机构剖视)。
图4为回转机构结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1至图4所示,一种新型胃镜治疗磁控机器人,在底座1上通过回转机构10连接转盘2,在回转机构10的中心轴处设置升降机构20,升降机构20的顶面设置座椅3;在转盘2上表面对称设有支撑铝型材4,两个支撑铝型材4的竖直轴线与升降机构2的中轴线在同一个竖直面内;支撑铝型材4的上端部连接磁铁旋转机构30。
所述的回转机构10的具体结构为,在底座1上圆周均布有四个回转轴承11,转盘2的圆周与回转轴承11配合,转盘的中心形成回转旋转轴J1;在底座1的中心固定连接回转同步带轮Ⅰ12,在转盘2非圆心处设有回转同步带轮Ⅱ13,回转同步带轮Ⅰ12与回转同步带轮Ⅱ13通过皮带连接,在回转同步带轮Ⅱ13的回转轴上连接电机加速机14。
所述的升降机构20是由伺服电机22和蜗轮蜗杆丝杠结构的升降减速机23组成,升降减速机的底座21固定在转盘2的中心,升降减速机23的升降部通过升降轴J3连接座椅3。
所述的磁铁旋转机构30结构为,在支撑铝型材4的顶部设有磁控减速机32,磁控减速机32的输出轴连接磁控同步带轮Ⅰ33;在支撑铝型材4的顶部连接水平梁31,水平梁31上设有磁铁机构34,磁铁机构34的中心转轴J2两端通过轴承座与水平梁31连接,在中心转轴J2的端部设有磁控同步带轮Ⅱ35,磁控同步带轮Ⅰ33与磁控同步带轮Ⅱ35通过皮带连接运行。
本申请的机器人进行胃镜治疗的控制方法,病人坐在新型胃镜治疗磁控机器人的座椅3上,然后吞服胶囊;医生调整升降机构20,将病人的胃调到磁铁旋转机构30中间;然后调整磁铁旋转机构30旋转,使胶囊对到胃部病灶位置,或者旋转回转机构10,使胶囊在胃部翻转,以扩大医生的观察范围,当医生操作完成后,人工取出胶囊,并将胃镜治疗磁控机器人复位,等待下次使用。
- 新型胃镜治疗磁控机器人
- 一种基于折纸艺术的磁棒架构全磁控机器人及其磁控方法