弹性关节
文献发布时间:2023-06-19 11:11:32
技术领域
本发明涉及一种包括驱动机构、弹性机构和从动机构的弹性关节。
背景技术
专利文献DE 102012214094 B3公开了一种机器人关节系统,包括两个各具关节的关节装置、两个驱动马达、一个蓄能装置和一个附加蓄能装置。借助两个关节装置之间的附加蓄能装置,可以将能量从一个关节装置传递到另一个关节装置,并由此从一个关节传递到另一个关节。实现该机器人关节系统的成本不菲。尤其是需要四个驱动马达。
专利文献DE 102006016958 A1公开了一种对抗性枢转设备。它具有可绕枢转轴线枢转的关节件,该关节件经由两个动力传递装置连接至两个驱动装置。这两个动力传递装置中整合有被动作用的刚度调节装置,但该调节装置不可调。
专利文献DE 102016226174A1涵盖一种具有多个刚性元件的非线性振动机构,其中各段经由关节、尤其是转节彼此连接。段与段之间设置有用于传递力和/或运动的振动元件。相互作用的振动元件的总和行使非线性振动行为,而无需致动器。但并未提供对非线性振动行为的调节。
专利文献EP 2006055 B1公开了一种用于机器人操纵器的弹性关节,该弹性关节的刚度通过凸轮盘以非线性方式与转动相关联。但未给予可变的刚度。
发明内容
在权利要求1中,本发明的目的在于,提出一种具有可变刚度的弹性关节。
本发明用以达成上述目的的解决方案为权利要求1所述的特征。
所述包括驱动机构、弹性机构和从动机构的弹性关节的特征尤其在于其可变的刚度。
为此,该弹性机构具有凸轮盘机构和杠杆机构。驱动机构连接至凸轮盘机构,其中,通过使与至少一个弹簧件相连接的凸轮盘转动,转矩能以非线性方式变化。凸轮盘连接至杠杆机构,其中,杠杆的第一杠杆臂在凸轮盘中心之外以能转动的方式连接至凸轮盘,杠杆的第二杠杆臂连接至从动机构,且杠杆的枢轴耦接至调节机构,以改变枢轴位置并由此改变刚度。
因此有利地,弹性关节为具有可变刚度的非线性弹性关节。这样弹性且由此柔性的关节代表了凸轮盘技术与杠杆技术组合实现具有可变刚度的非线性弹性关节。通过具有可变刚度的非线性弹性关节进行耦合到从动机构的肢体的运动。借助与杠杆机构的枢轴连接的调节机构来调节刚度。凸轮盘机构用来确保渐进的非线性转矩曲线。通过转动凸轮盘可实现非线性转矩曲线。通过弹簧件实施这里作用的刚度。
借助弹性机构中的杠杆机构,实现渐进的非线性角度-转矩特性。此外,调节刚度所需的转矩很小。
这样有利地适用于机器人。在可控的刚度下,能够确保安全的人机交互。
同时,根据要求,能够在接触中施加足够高的接触力。这样机器人就更加安全,并且能够在服务区域内执行例如各种组装任务或体力上困难的任务。
本发明的有利技术方案参阅从属权利要求2至11。
根据权利要求2的改进方案,凸轮盘具有两个相反的切口,这两个切口均具有边缘朝内的曲线。该曲线可以是自由曲线,例如贝塞尔曲线(Bezier Curve)或用样条函数(Spline Function)描述的曲线,或者是具有圆锥曲线或至少圆锥曲线组合的弧形。这样就能实现多种角度-转矩特性。
根据权利要求3的改进方案,至少一个弹簧件均经由滚柱接合至凸轮盘的切口的边缘。
根据权利要求4的改进方案,两个相互平行间隔布置的弹簧件均经由弹簧件的端接部彼此连接。此外,该端接部包括滚柱,使得该滚柱的中心位于弹簧件之间的延伸空间中。这样四个弹簧件就在两个方向上作用以便转动,使得弹性关节能够产生高转矩。同时,端接件为滑块。
根据权利要求5的改进方案,驱动机构经由至少一个弹簧件和滚柱连接至凸轮盘。这样就有利地实现了凸轮盘机构,该凸轮盘机构确保了渐进的非线性转矩曲线。通过转动凸轮盘产生非线性转矩曲线。通过弹簧件实现刚度。
根据权利要求6的改进方案,驱动机构连接至凸轮盘。
根据权利要求7的改进方案,调节机构是螺杆带动螺母线性单元。这种单元有利地自锁,从而仅当驱动螺杆时才改变枢轴的位置。在本实施方式中,杠杆的枢轴耦接至线性调节机构,用于改变刚度。
根据权利要求8的改进方案,螺杆连接至致动器。该致动器可以尤其是电动机。
根据权利要求9的改进方案,从动机构为与第二杠杆臂相连接的可转盘体。这样就能实现一种紧凑的弹性关节。
根据权利要求10的改进方案,凸轮盘、杠杆、调节机构和盘体彼此相继且彼此相隔布置。
根据权利要求11的改进方案,所述盘体是对机器人肢体的支撑体。
附图说明
原理上在附图中示出并在下文详细描述本发明的实施例。
图中:
图1示出弹性关节;
图2示出凸轮盘机构;
图3示出凸轮盘机构和杠杆机构;
图4示出旋转的凸轮盘机构与旋转的杠杆机构;以及
图5示出弹性关节与枢轴的调节机构。
具体实施方式
弹性关节主要由驱动机构1、弹性机构2和从动机构3组成。
图1示出弹性关节的原理图。
弹性机构2具有凸轮机构4和杠杆机构5。
图2示出弹性机构2的凸轮盘机构4的原理图。
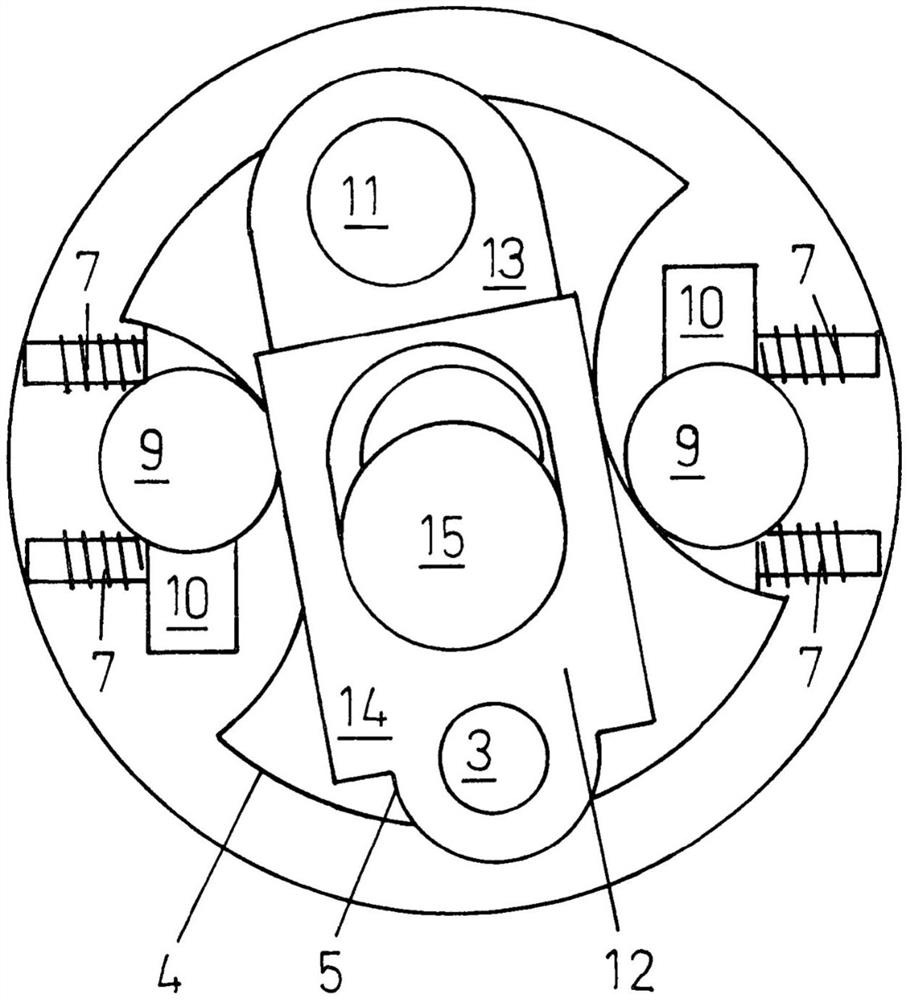
驱动机构1连接至凸轮盘机构4,其中,通过使与至少一个弹簧件7相连接的凸轮盘6转动,转矩能以非线性方式变化。为此,凸轮盘6具有两个相反的切口,这两个切口均具有边缘8朝内的曲线。该曲线可以是自由曲线,如贝塞尔曲线或用样条函数描述的曲线,或者是具有圆锥曲线或至少圆锥曲线组合的弧形。弹簧件7均经由滚柱9接合至凸轮盘6的切口的边缘8。在此,两个相互平行间隔布置的弹簧件7均经由弹簧件7的端接部10彼此连接。端接部10作为滑块10均包括滚柱9,使得滚柱9的中心位于弹簧件7之间的延伸空间中。驱动机构1经由弹簧件7和滚柱9连接至凸轮盘6。杠杆机构5的连接件11位于凸轮盘6的中心之外。
图3示出凸轮盘机构和杠杆机构的原理图。
凸轮盘6经由连接件11连接至杠杆机构5,其中,连接件11可以是销11。杠杆12的第一杠杆臂13经由连接件11在凸轮盘6中心之外以能转动的方式连接至凸轮盘6。杠杆12的第二杠杆臂14连接至从动机构3,为此,该从动机构3可以构造为杠杆销。
图4示出转动的凸轮盘机构4与转动的杠杆机构5的原理图。
杠杆12的枢轴15耦接至调节机构16,以改变枢轴15的位置并就此改变刚度。
图5示出弹性关节与枢轴15的调节机构16的原理图。
调节机构16可以尤其是已知的螺杆带动螺母线性单元,其中,螺杆连接至致动器17。
从动机构3可以尤其构造为可转盘体,该盘体经由杠杆销与第二杠杆臂14相连接。凸轮盘6、杠杆12、调节机构16和耦接至杠杆销的盘体可以彼此相继且彼此间隔地布置,从而实现紧凑的弹性关节。盘体可以是机器人肢体的支撑体。
驱动机构1和致动器17是已知的电动机。
- 一种用于治疗膝关节骨关节炎的弹性假体
- 多关节跳跃机器人弹性关节模块化驱动装置