一种爬杆机器人控制系统及其控制方法
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及机器人控制系统技术领域,尤其涉及一种爬杆机器人控制系统及其控制方法。
背景技术
机器人系统是由机器人和作业对象及环境共同构成的整体,其中包括机械系统、驱动系统、控制系统和感知系统四大部分,机器人是一种自动化的机器,这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。
随着现代社会的不断发展,城市输电线路的数量逐渐增多,理论上,输电线路受外界环境因素影响较小,安全运行可靠性较高,但是实际上输电线路上的导线以及绝缘子在长期的外界开放环境中难免会有外界因素的影响,例如运行一段时间后会有尘土、鸟粪等污垢附着,这些问题最终可能会造成输电线路故障率上升,导致停电事故频发,因此,需要对输电线路进行检修。
首先,国内输电线路检查与维修多数由人工完成,因为是室外作业,检修人员在爬高作业的同时,需要忍受风吹日晒雨淋的困扰,工作条件艰苦,工作强度较大;
其次,电力检修时,时常需要带电作业,人工与带电设备短距离接触存在较大的安全隐患,由于操作不当或者未遵守安全规章或者因意外情况发生,极易发生重大安全事故。
发明内容
为了解决上述背景技术中所提到的问题,而提出的一种爬杆机器人控制系统及其控制方法。
为了实现上述目的,本发明采用了如下技术方案:
一种爬杆机器人控制系统,包括爬杆机器人,所述爬杆机器人上连接有无线遥控设备;
所述爬杆机器人包括爬杆机器人本体、持重臂和作业工具;
所述爬杆机器人本体包括左侧动作机构、右侧动作机构以及躯干动作机构;
所述机器人控制器设置在躯干动作机构上,所述双目摄像头和激光雷达传感器分别设置在爬杆机器人本体的上端部和下端部;
所述机器人控制器用于收取作业环境数据并发送至机器人控制器上的双目摄像头和激光雷达传感器;
所述左侧动作机构包括左臂上推杆机构、左臂下推杆机构、左臂下主动轮提拉机构和左躯干肩关节机构;
所述左臂上推杆机构上设有左臂上推杆松杆到位传感器和左臂上推杆握杆到位传感器;
所述左臂下推杆机构上设有左臂下推杆松杆到位传感器和左臂下推杆握杆到位传感器;
所述左躯干肩关节机构上设有左躯干肩关节外旋到位传感器和左躯干关节机构内旋到位传感器;
所述右侧动作机构包括右臂上推杆机构、右臂下推杆机构、右臂下主动轮提拉机构、右躯干肩关节机构;
所述右臂上推杆机构上设有右臂上推杆松杆到位传感器和右臂上推杆握杆到位传感器;
所述右臂下推杆机构上设有右臂下推杆松杆到位传感器和右臂下推杆握杆到位传感器;
所述右躯干肩关节机构上设有右躯干肩关节外旋到位传感器和右躯干关节机构内旋到位传感器;
所述持重臂包括持重臂旋转轴、持重上下轴以及持重臂工具轴,所述持重上下轴安装在持重臂旋转轴上,所述持重臂工具轴安装在持重上下轴上,所述作业工具设置在持重臂工具轴上;
所述持重臂旋转轴上设有持重臂旋转轴原点传感器,所述持重上下轴上设有持重上下轴原点传感器,所述持重臂工具轴上设有持重臂工具轴原点传感器;
所述躯干动作机构上设有躯干上升到位传感器和躯干下降到位传感器;
所述机器人控制器与无线遥控设备连接,用以实现爬杆机器人和机器人控制器的连接。
作为上述技术方案的进一步描述:
所述机器人控制器包括控制器、控制器输出模块、控制器输入模块、控制器通信接口、控制器无线通信接口;
所述控制器输出模块均对应与左臂上推杆机构、左臂下推杆机构、左臂下主动轮提拉机构、左躯干肩关节机构、右臂上推杆机构、右臂下推杆机构、右臂下主动轮提拉机构、右躯干肩关节机构、躯干动作机构、持重臂以及作业工具连接;
所述控制器输入模块均对应与左臂上推杆松杆到位传感器、左臂上推杆握杆到位传感器、左臂下推杆松杆到位传感器、左臂下推杆握杆到位传感器、左躯干肩关节外旋到位传感器、左躯干关节机构内旋到位传感器、右臂上推杆松杆到位传感器、右臂上推杆握杆到位传感器、右臂下推杆松杆到位传感器、右臂下推杆握杆到位传感器、右躯干肩关节外旋到位传感器、右躯干关节机构内旋到位传感器、躯干上升到位传感器和躯干下降到位传感器、持重臂旋转轴原点传感器、持重上下轴原点传感器和持重臂工具轴原点传感器连接;
所述控制器通信接口与双目摄像头和激光雷达传感器连接;
所述控制器无线通信接口与无线遥控设备连接。
作为上述技术方案的进一步描述:
所述机器人控制器包括自动模式和手动模式,自动模式包括爬杆过程,手动模式包括爬杆过程和作业过程,自动模式结束后的作业过程以及手动模式均受无线遥控设备控制。
作为上述技术方案的进一步描述:
一种爬杆机器人控制系统的控制方法,包括自动模式和手动模式,其中,自动模式的爬杆过程具体步骤如下:
Sz1、机器人控制器发出爬杆机器人松杆、握杆动作启动指令,根据动作流程,左右臂需要交替动作,当机器人控制器发出指令为左臂启动指令时,左臂动作流程启动;
Sz2、左臂上推杆机构与左臂下推杆机构同时动作,当左臂上推杆松杆到位传感器和右臂上推杆松杆到位传感器信号都被触发时,松杆动作完成;
Sz3、左臂上推杆机构与左臂下推杆机构二者都松杆到位后,左臂下主动轮提拉机构进行收起动作,当左臂下主动轮提拉机构收起完成后,左躯干肩关节机构外旋动作启动,当左躯干肩关节机构外旋到位传感器信号被触发后,左躯干肩关节机构外旋动作完成;
Sz4、当左躯干肩关节机构外旋动作完成后,躯干动作机构根据指令决定是上升还是下降;
当机器人控制器要求上升时,待躯干上升到位传感器信号被触发时,说明躯干动作机构上升动作完成;
当机器人控制器要求下降时,待躯干下降到位传感器信号被触发时,说明躯干动作机构下降动作完成;
Sz5、步骤Sz2至步骤Sz4为左臂松杆过程,在左臂松杆完成后,接着进行左臂握杆过程;
Sz6、左躯干关节机构内旋动作启动,当左躯干肩关节内旋到位传感器信号被触发时,则左躯干关节机构内旋到位,动作完成;
Sz7、当左臂下主动轮提拉机构下放到位后,左臂上推杆机构与左臂下推杆机构同时动作,当左臂上推杆握杆到位传感器和左臂下推杆握杆到位传感器信号都被触发时,握杆动作完成;
Sz8、当机器人控制器发出指令为右臂启动指令时,同理,右臂的动作过程与上述左臂的动作过程一致。
作为上述技术方案的进一步描述:
在步骤Sz4中,当左躯干肩关节机构外旋动作完成后,当躯干动作机构决定是上升还是下降时会事先进行障碍物检测,当遇到障碍物后,会进行避障模式,避障模式的具体流程步骤如下:
Sb1、机器人控制器内预先设定好爬杆机器人爬杆的安全距离;
Sb2、当激光雷达传感器检测到障碍物后,激光雷达传感器将数据发送给机器人控制器,机器人控制器通过计算,算出障碍物与爬杆机器人之间的距离;
Sb3、若距离大于安全距离,则爬杆机器人继续执行爬杆动作,若距离小于安全距离,则机器人控制器重新规划合理路径以避开障碍物。
作为上述技术方案的进一步描述:
在自动模式中爬杆机器人始终需要依赖双目摄像头和激光雷达传感器对周围的工作环境进行感知构建,进而让爬杆机器人识别出环境中的电缆以及爬杆过程中的障碍物,具体环境感知过程如下:
Sg1、激光雷达传感器传感器采集工作环境的激光雷达数据,经过中值滤波处理后,提取感知区间的数据,并对感知区间的数据进行聚类分析;
Sg2、聚类分析后再进一步地进行特征值分析,比对已有数据库,确定正确数据,并将正确数据进行坐标系转换,将其转换到双目摄像头坐标系下,方便后续数据融合;
Sg3、双目摄像头传感器采集工作环境的数据数据,获取图像的RGB数据,随后进行灰度化处理;
Sg4、将灰度化处理后的数据信息与激光雷达传感器获取到的信息数据在同一坐标系下融合处理,并提取融合数据后的感知区间,在已有数据库中查询工作环境特征值,并与融合数据后的感知区间进行数据特征值识别;
Sg5、根据识别出融合数据中的目标数据的特征值,计算出目标物体的信息,最后向机器人控制器给定目标物体的坐标数据,帮助引导爬杆机器人完成指定功能。
作为上述技术方案的进一步描述:
一种爬杆机器人控制系统的控制方法,手动模式的具体步骤如下:
Sh1、爬杆机器人的动作过程与自动模式一致,不同之处在于:
爬杆机器人每次执行的动作,都是通过无线遥控设备进行控制,并且在爬行过程中遇到障碍物时均通过无线遥控设备控制爬杆机器人进行避障,爬杆机器人完成爬杆过程;
Sh2、持重臂旋转轴需要回原点时,通过无线遥控设备遥控持重臂旋转轴向原点方向移动,当持重臂旋转原点传感器信号被触发时,持重臂旋转轴停止,回零动作完成;
Sh3、持重臂上下轴需要回原点时,通过无线遥控设备遥控持重臂上下轴向原点方向移动,当持重臂上下轴原点传感器信号被触发时,持重上下轴轴停止,回零动作完成;
Sh4、持重臂工具轴需要回原点时,通过无线遥控设备遥控持重臂工具轴向原点方向移动,当持重臂工具轴原点传感器信号被触发时,持重臂工具轴停止,回零动作完成。
作为上述技术方案的进一步描述:
所述自动模式结束后的作业过程与手动模式中的步骤Sh2至步骤Sh4一致。
综上所述,由于采用了上述技术方案,本发明的有益效果是:
通过控制爬杆机器人代替人工进行电力检修作业,可以实现全自动爬杆检修作业或者在较复杂工况下,人工手动遥控作业可以极大的降低工作人员劳动强度、降低施工危险系数。
附图说明
图1示出了根据本发明实施例提供的一种爬杆机器人控制系统及其控制方法的控制系统的连接示意图;
图2示出了根据本发明实施例提供的一种爬杆机器人控制系统及其控制方法的爬杆机器人松杆动作流程示意图;
图3示出了根据本发明实施例提供的一种爬杆机器人控制系统及其控制方法的爬杆机器人握杆动作示意图;
图4示出了根据本发明实施例提供的一种爬杆机器人控制系统及其控制方法的爬杆机器人自动模式中的避障流程示意图;
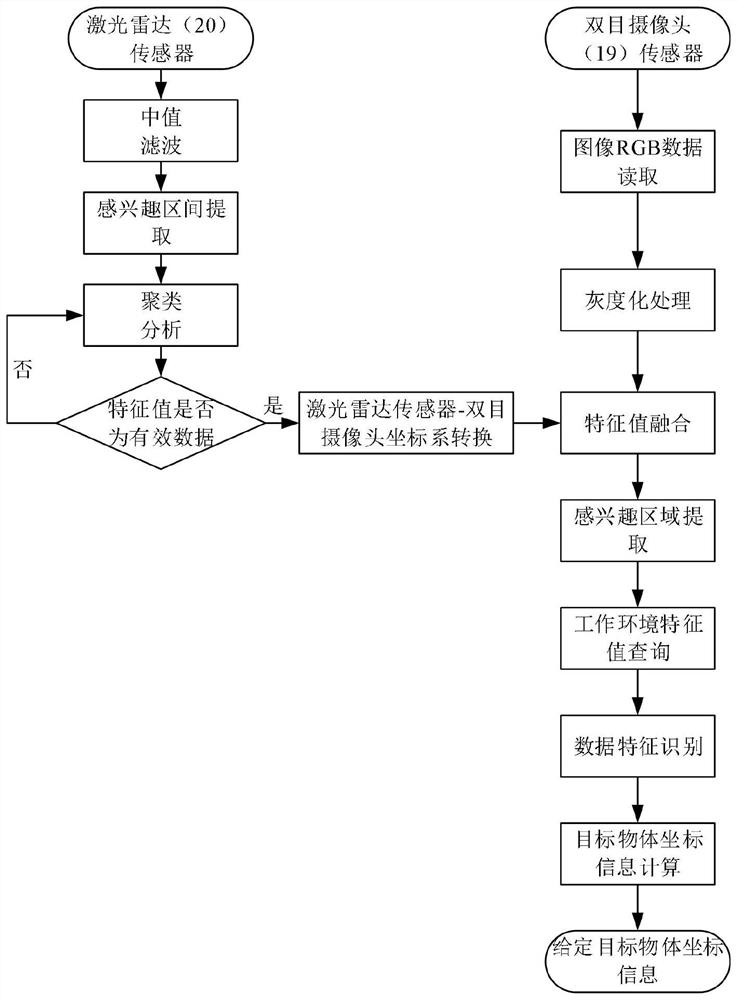
图5示出了根据本发明实施例提供的一种爬杆机器人控制系统及其控制方法的爬杆机器人运动时的环境感知功能流程示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
实施例一
请参阅图1-5,本发明提供一种技术方案:一种爬杆机器人控制系统,包括爬杆机器人,爬杆机器人上连接有无线遥控设备;
爬杆机器人包括爬杆机器人本体、持重臂和作业工具;
爬杆机器人本体包括左侧动作机构、右侧动作机构以及躯干动作机构;
机器人控制器设置在躯干动作机构上,双目摄像头和激光雷达传感器分别设置在爬杆机器人本体的上端部和下端部;
机器人控制器用于收取作业环境数据并发送至机器人控制器上的双目摄像头和激光雷达传感器;
左侧动作机构包括左臂上推杆机构、左臂下推杆机构、左臂下主动轮提拉机构和左躯干肩关节机构;
左臂上推杆机构上设有左臂上推杆松杆到位传感器和左臂上推杆握杆到位传感器;
左臂下推杆机构上设有左臂下推杆松杆到位传感器和左臂下推杆握杆到位传感器;
左躯干肩关节机构上设有左躯干肩关节外旋到位传感器和左躯干关节机构内旋到位传感器;
右侧动作机构包括右臂上推杆机构、右臂下推杆机构、右臂下主动轮提拉机构、右躯干肩关节机构;
右臂上推杆机构上设有右臂上推杆松杆到位传感器和右臂上推杆握杆到位传感器;
右臂下推杆机构上设有右臂下推杆松杆到位传感器和右臂下推杆握杆到位传感器;
右躯干肩关节机构上设有右躯干肩关节外旋到位传感器和右躯干关节机构内旋到位传感器;
持重臂包括持重臂旋转轴、持重上下轴以及持重臂工具轴,持重上下轴安装在持重臂旋转轴上,持重臂工具轴安装在持重上下轴上,作业工具设置在持重臂工具轴上;
持重臂旋转轴上设有持重臂旋转轴原点传感器,持重上下轴上设有持重上下轴原点传感器,持重臂工具轴上设有持重臂工具轴原点传感器;
躯干动作机构上设有躯干上升到位传感器和躯干下降到位传感器;
机器人控制器与无线遥控设备连接,用以实现爬杆机器人和机器人控制器的连接。
请参阅图1,机器人控制器包括控制器、控制器输出模块、控制器输入模块、控制器通信接口、控制器无线通信接口;
控制器输出模块均对应与左臂上推杆机构、左臂下推杆机构、左臂下主动轮提拉机构、左躯干肩关节机构、右臂上推杆机构、右臂下推杆机构、右臂下主动轮提拉机构、右躯干肩关节机构、躯干动作机构、持重臂以及作业工具连接;
控制器输入模块均对应与左臂上推杆松杆到位传感器、左臂上推杆握杆到位传感器、左臂下推杆松杆到位传感器、左臂下推杆握杆到位传感器、左躯干肩关节外旋到位传感器、左躯干关节机构内旋到位传感器、右臂上推杆松杆到位传感器、右臂上推杆握杆到位传感器、右臂下推杆松杆到位传感器、右臂下推杆握杆到位传感器、右躯干肩关节外旋到位传感器、右躯干关节机构内旋到位传感器、躯干上升到位传感器和躯干下降到位传感器、持重臂旋转轴原点传感器、持重上下轴原点传感器和持重臂工具轴原点传感器连接;
控制器通信接口与双目摄像头和激光雷达传感器连接;
控制器无线通信接口与无线遥控设备连接。
请参阅图2和图3,机器人控制器包括自动模式和手动模式,自动模式包括爬杆过程,手动模式包括爬杆过程和作业过程,自动模式结束后的作业过程以及手动模式均受无线遥控设备控制。
请参阅图2和图3,一种爬杆机器人控制系统的控制方法,包括自动模式和手动模式,其中,自动模式的爬杆过程具体步骤如下:
Sz1、机器人控制器发出爬杆机器人松杆、握杆动作启动指令,根据动作流程,左右臂需要交替动作,当机器人控制器发出指令为左臂启动指令时,左臂动作流程启动;
Sz2、左臂上推杆机构与左臂下推杆机构同时动作,当左臂上推杆松杆到位传感器和右臂上推杆松杆到位传感器信号都被触发时,松杆动作完成;
Sz3、左臂上推杆机构与左臂下推杆机构二者都松杆到位后,左臂下主动轮提拉机构进行收起动作,当左臂下主动轮提拉机构收起完成后,左躯干肩关节机构外旋动作启动,当左躯干肩关节机构外旋到位传感器信号被触发后,左躯干肩关节机构外旋动作完成;
Sz4、当左躯干肩关节机构外旋动作完成后,躯干动作机构根据指令决定是上升还是下降;
当机器人控制器要求上升时,待躯干上升到位传感器信号被触发时,说明躯干动作机构上升动作完成;
当机器人控制器要求下降时,待躯干下降到位传感器信号被触发时,说明躯干动作机构下降动作完成;
Sz5、步骤Sz2至步骤Sz4为左臂松杆过程,在左臂松杆完成后,接着进行左臂握杆过程;
Sz6、左躯干关节机构内旋动作启动,当左躯干肩关节内旋到位传感器信号被触发时,则左躯干关节机构内旋到位,动作完成;
Sz7、当左臂下主动轮提拉机构下放到位后,左臂上推杆机构与左臂下推杆机构同时动作,当左臂上推杆握杆到位传感器和左臂下推杆握杆到位传感器信号都被触发时,握杆动作完成;
Sz8、当机器人控制器发出指令为右臂启动指令时,同理,右臂的动作过程与上述左臂的动作过程一致。
请参阅图4,在步骤Sz4中,当左躯干肩关节机构外旋动作完成后,当躯干动作机构决定是上升还是下降时会事先进行障碍物检测,当遇到障碍物后,会进行避障模式,避障模式的具体流程步骤如下:
Sb1、机器人控制器内预先设定好爬杆机器人爬杆的安全距离;
Sb2、当激光雷达传感器检测到障碍物后,激光雷达传感器将数据发送给机器人控制器,机器人控制器通过计算,算出障碍物与爬杆机器人之间的距离;
Sb3、若距离大于安全距离,则爬杆机器人继续执行爬杆动作,若距离小于安全距离,则机器人控制器重新规划合理路径以避开障碍物。
请参阅图5,在自动模式中爬杆机器人始终需要依赖双目摄像头和激光雷达传感器对周围的工作环境进行感知构建,进而让爬杆机器人识别出环境中的电缆以及爬杆过程中的障碍物,具体环境感知过程如下:
Sg1、激光雷达传感器传感器采集工作环境的激光雷达数据,经过中值滤波处理后,提取感知区间的数据,并对感知区间的数据进行聚类分析;
其中,聚类分析为:分析哪些是工作环境中的无关事物,哪些是工作环境中的重要事物;
Sg2、聚类分析后再进一步地进行特征值分析,比对已有数据库,确定正确数据,并将正确数据进行坐标系转换,将其转换到双目摄像头坐标系下,方便后续数据融合;
Sg3、双目摄像头传感器采集工作环境的图像数据,获取图像的RGB数据,随后进行灰度化处理;
Sg4、将灰度化处理后的数据信息与激光雷达传感器获取到的信息数据在同一坐标系下融合处理,并提取融合数据后的感知区间,在已有数据库中查询工作环境特征值,并与融合数据后的感知区间进行数据特征值识别;
Sg5、根据识别出融合数据中的目标数据的特征值,计算出目标物体的信息,最后向机器人控制器给定目标物体的坐标数据,帮助引导爬杆机器人完成指定功能。
请参阅图1-3,一种爬杆机器人控制系统的控制方法,其特征在于,手动模式的具体步骤如下:
Sh1、爬杆机器人的动作过程与自动模式一致,不同之处在于:
爬杆机器人每次执行的动作,都是通过无线遥控设备进行控制,并且在爬行过程中遇到障碍物时均通过无线遥控设备控制爬杆机器人进行避障,爬杆机器人完成爬杆过程;
Sh2、持重臂旋转轴需要回原点时,通过无线遥控设备遥控持重臂旋转轴向原点方向移动,当持重臂旋转原点传感器信号被触发时,持重臂旋转轴停止,回零动作完成;
Sh3、持重臂上下轴需要回原点时,通过无线遥控设备遥控持重臂上下轴向原点方向移动,当持重臂上下轴原点传感器信号被触发时,持重上下轴轴停止,回零动作完成;
Sh4、持重臂工具轴需要回原点时,通过无线遥控设备遥控持重臂工具轴向原点方向移动,当持重臂工具轴原点传感器信号被触发时,持重臂工具轴停止,回零动作完成。
其中,自动模式结束后的作业过程与手动模式中的步骤Sh2至步骤Sh4一致。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种爬杆机器人控制系统及其控制方法
- 一种多姿态爬杆机器人无线控制系统