一种智慧课堂辅助教学机器人
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及教学设备技术领域,尤其涉及一种智慧课堂辅助教学机器人。
背景技术
课堂是学生学习的场所。因此,在教学中,要根据教学实际,创设必要的情境,给学生提供课内实践的机会,让学生在特定的环境中进行实践体验,使他们在活动中感悟道理,体验情感,规范行为。课堂是学生学习的场所,学生是学习的主体,是学习的主人。课堂是学生学习的场所,教师应该运用自己的智慧和创造力,挖掘蕴涵其中的无限生机和活力,现阶段,为了提高教师的授课效率,同时增加课堂的趣味性,教师在授课时,通常会使用到教学机器人。
中国专利CN202781159U公开了一种仿真人课堂教学机器人,它包括底盘、腿部、身躯、手臂、颈部、头部和微控制系统,所述的底盘上设有四个全向驱动轮,底盘与腿部固定连接;所述的腿部成仿女裙式结构,腿部与身躯以套接的方式连接在一起,手臂为双手或单手结构,通过机械部件连接在身躯的侧边,身躯为双层方形结构,但是该装置不能对黑板进行擦拭,增加了教师的负担,因此,我们提出一种智慧课堂辅助教学机器人。
发明内容
本发明的目的在于提供一种智慧课堂辅助教学机器人,包括主体,主体的顶部设置有播放腔,播放腔的前侧设置有扬声器,主体的外部设置有用于保护主体的保护架,主体的两侧对称设置有摆动组件,右侧所述的摆动组件固定连接有清洁组件,主体的底部设置有用于支撑主体的支撑组件,主体和播放腔之间通过连接杆固定连接,主体的前侧壁固定安装有显示屏,以解决现有装置不能对黑板进行擦拭,增加了教师的负担的问题。
为实现上述目的,本发明提供如下技术方案:
一种智慧课堂辅助教学机器人,包括主体,主体的顶部设置有播放腔,播放腔的前侧设置有扬声器,主体的外部设置有用于保护主体的保护架,主体的两侧对称设置有摆动组件,右侧所述的摆动组件固定连接有清洁组件,主体的底部设置有用于支撑主体的支撑组件,主体和播放腔之间通过连接杆固定连接,主体的前侧壁固定安装有显示屏。
作为本发明进一步的方案:支撑组件包括第一工作电机和水平支撑台,水平支撑台的下表面固定安装有第一工作电机,第一工作电机的输出端贯穿水平支撑台,并且固定连接有主体,水平支撑台的下方对称设置有两个用于支撑水平支撑台的支撑腿,支撑腿的底部安装有滚轮,水平支撑台内对称设置有两个调节槽,调节槽内设置有用于调节支撑腿位置的调节组件。
作为本发明再进一步的方案:调节组件包括转轮和螺杆,螺杆安装在调节槽内,且螺杆和调节槽转动连接,螺杆的一端固定安装有转轮,螺杆的外部套设有螺纹块,螺纹块和螺杆之间通过螺纹连接,螺纹块的下方固定连接有支撑腿。
作为本发明再进一步的方案:摆动组件第二工作电机、摆动臂和液压缸,第二工作电机固定安装在主体的侧壁上,且第二工作电机的输出端固定连接有摆动臂,摆动臂内设置有竖直滑槽,竖直滑槽内固定安装有液压缸。
作为本发明再进一步的方案:左侧所述的摆动组件固定连接有签到板,签到板上安装有触控屏。
作为本发明再进一步的方案:清洁组件包括吸尘腔和缓冲腔,吸尘腔内对称安装有两个用于除尘的抽风机,吸尘腔的前侧壁固定连接有清洁槽,清洁槽内周向均布有多个清洁块。
作为本发明再进一步的方案:清洁块的后侧设置有缓冲腔,缓冲腔内设置有用于保护清洁块的缓冲弹簧,缓冲弹簧的一端通过减震杆与清洁块固定连接,清洁槽的中心位置固定安装有第三工作电机,第三工作电机的输出端固定连接有振动块。
综上所述,本发明的有益效果是:本发明实施例设置了支撑组件,支撑组件的设置实现了对主体的稳固支撑,实现了对支撑腿的保护,避免了主体的倾倒,保证了本发明实施例的稳定性,且清洁组件的设置能够对灰尘进行快速收集,清洁块对黑板进行擦拭,第三工作电机启动带动振动块转动,提高了擦拭效率。
附图说明
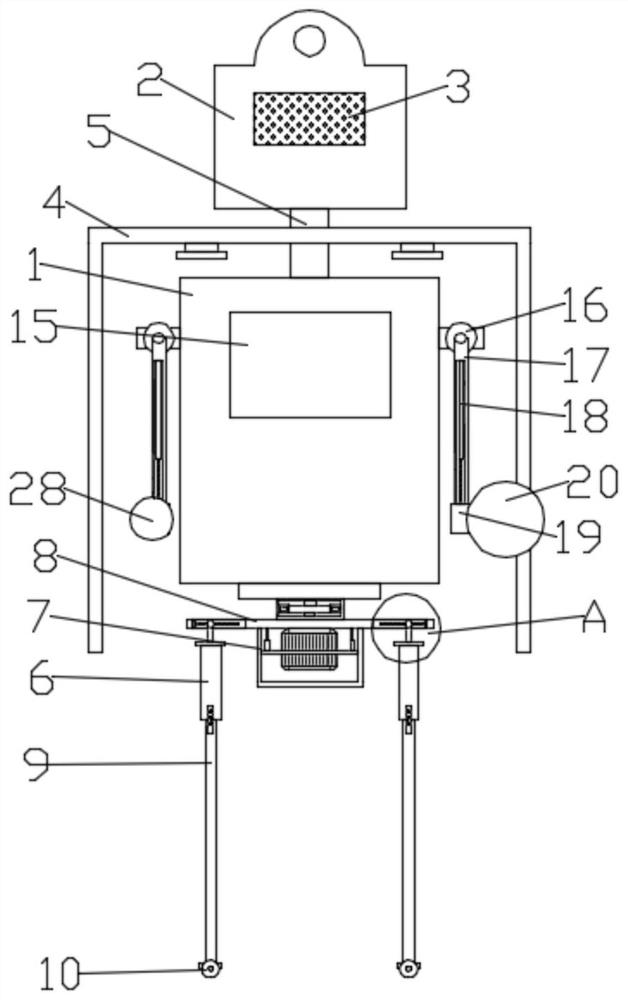
图1为发明的结构示意图。
图2为发明中保护架的结构示意图。
图3为图1中A的局部放大示意图。
图4为发明中清洁组件的结构示意图。
图5为发明中清洁组件的主视图。
图6为发明中吸尘腔的结构示意图。
图7为发明中清洁槽的结构示意图。
图中:1-主体、2-播放腔、3-扬声器、4-保护架、5-连接杆、6-支撑组件、7-第一工作电机、8-水平支撑台、9-支撑腿、10-滚轮、11-调节槽、12-转轮、13-螺纹块、14-螺杆、15-显示屏、16-第二工作电机、17-摆动臂、18-液压缸、19-吸尘腔、20-清洁槽、21-抽风机、22-缓冲腔、23-清洁块、24-第三工作电机、25-振动块、26-减震杆、27-缓冲弹簧、28-签到板。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
如图1-2所示,本发明实施例中,一种智慧课堂辅助教学机器人,包括主体1,主体1的顶部设置有播放腔2,播放腔2的前侧设置有扬声器3,主体1的外部设置有用于保护主体1的保护架4,主体1的两侧对称设置有摆动组件,右侧所述的摆动组件固定连接有清洁组件,主体1的底部设置有用于支撑主体1的支撑组件6;
主体1和播放腔2之间通过连接杆5固定连接;
支撑组件6包括第一工作电机7和水平支撑台8,水平支撑台8的下表面固定安装有第一工作电机7,第一工作电机7的输出端贯穿水平支撑台8,并且固定连接有主体1,水平支撑台8的下方对称设置有两个用于支撑水平支撑台8的支撑腿9,支撑腿9的底部安装有滚轮10,水平支撑台8内对称设置有两个调节槽11,调节槽11内设置有用于调节支撑腿9位置的调节组件;
如图3所示,调节组件包括转轮12和螺杆14,螺杆14安装在调节槽11内,且螺杆14和调节槽11转动连接,螺杆14的一端固定安装有转轮12,螺杆14的外部套设有螺纹块13,螺纹块13和螺杆14之间通过螺纹连接,螺纹块13的下方固定连接有支撑腿9;
使用时,需要转动主体1的旋转角度时,开启第一工作电机7,第一工作电机7带动主体1转动,从而实现了对主体1旋转角度的调节;
需要调节支撑腿9的位置时,转动转轮12,转轮12带动螺杆14转动,从而使得螺杆14带动螺纹块13和支撑腿9移动,进一步实现了对支撑腿9的保护,避免了主体1的倾倒,保证了本发明实施例的稳定性。
摆动组件第二工作电机16、摆动臂17和液压缸18,第二工作电机16固定安装在主体1的侧壁上,且第二工作电机16的输出端固定连接有摆动臂17,摆动臂17内设置有竖直滑槽,竖直滑槽内固定安装有液压缸18;
左侧所述的摆动组件固定连接有签到板28,签到板28上安装有触控屏。
实施例2
如图1-2所示,本发明实施例中,一种智慧课堂辅助教学机器人,包括主体1,主体1的顶部设置有播放腔2,播放腔2的前侧设置有扬声器3,主体1的外部设置有用于保护主体1的保护架4,主体1的两侧对称设置有摆动组件,右侧所述的摆动组件固定连接有清洁组件,主体1的底部设置有用于支撑主体1的支撑组件6;
主体1和播放腔2之间通过连接杆5固定连接;
支撑组件6包括第一工作电机7和水平支撑台8,水平支撑台8的下表面固定安装有第一工作电机7,第一工作电机7的输出端贯穿水平支撑台8,并且固定连接有主体1,水平支撑台8的下方对称设置有两个用于支撑水平支撑台8的支撑腿9,支撑腿9的底部安装有滚轮10,水平支撑台8内对称设置有两个调节槽11,调节槽11内设置有用于调节支撑腿9位置的调节组件;
如图3所示,调节组件包括转轮12和螺杆14,螺杆14安装在调节槽11内,且螺杆14和调节槽11转动连接,螺杆14的一端固定安装有转轮12,螺杆14的外部套设有螺纹块13,螺纹块13和螺杆14之间通过螺纹连接,螺纹块13的下方固定连接有支撑腿9;
使用时,需要转动主体1的旋转角度时,开启第一工作电机7,第一工作电机7带动主体1转动,从而实现了对主体1旋转角度的调节;
需要调节支撑腿9的位置时,转动转轮12,转轮12带动螺杆14转动,从而使得螺杆14带动螺纹块13和支撑腿9移动,进一步实现了对支撑腿9的保护,避免了主体1的倾倒,保证了本发明实施例的稳定性。
摆动组件第二工作电机16、摆动臂17和液压缸18,第二工作电机16固定安装在主体1的侧壁上,且第二工作电机16的输出端固定连接有摆动臂17,摆动臂17内设置有竖直滑槽,竖直滑槽内固定安装有液压缸18;
左侧所述的摆动组件固定连接有签到板28,签到板28上安装有触控屏;
如图4-7所示,清洁组件包括吸尘腔19和缓冲腔22,吸尘腔19内对称安装有两个用于除尘的抽风机21,吸尘腔19的前侧壁固定连接有清洁槽20,清洁槽20内周向均布有多个清洁块23,清洁块23的后侧设置有缓冲腔22,缓冲腔22内设置有用于保护清洁块23的缓冲弹簧27,缓冲弹簧27的一端通过减震杆26与清洁块23固定连接;
清洁槽20的中心位置固定安装有第三工作电机24,第三工作电机24的输出端固定连接有振动块25;
使用时,开启第二工作电机16,第二工作电机16带动摆动臂17转动,然后开启液压缸18,液压缸18带动吸尘腔19和清洁槽20移动,从而实现了对清洁组件清洁效率的调节,同时抽风机21启动能够对灰尘进行快速收集,清洁块23对黑板进行擦拭,第三工作电机24启动带动振动块25转动,提高了擦拭效率。
主体1的前侧壁固定安装有显示屏15。
综上所述,本发明的工作原理是:使用时,开启第二工作电机16,第二工作电机16带动摆动臂17转动,然后开启液压缸18,液压缸18带动吸尘腔19和清洁槽20移动,从而实现了对清洁组件清洁效率的调节,同时抽风机21启动能够对灰尘进行快速收集,清洁块23对黑板进行擦拭,第三工作电机24启动带动振动块25转动,提高了擦拭效率。
需要调节支撑腿9的位置时,转动转轮12,转轮12带动螺杆14转动,从而使得螺杆14带动螺纹块13和支撑腿9移动,进一步实现了对支撑腿9的保护,避免了主体1的倾倒,保证了本发明实施例的稳定性。
使用时,需要转动主体1的旋转角度时,开启第一工作电机7,第一工作电机7带动主体1转动,从而实现了对主体1旋转角度的调节。
本发明实施例设置了支撑组件6,支撑组件6的设置实现了对主体1的稳固支撑,实现了对支撑腿9的保护,避免了主体1的倾倒,保证了本发明实施例的稳定性,且清洁组件的设置能够对灰尘进行快速收集,清洁块23对黑板进行擦拭,第三工作电机24启动带动振动块25转动,提高了擦拭效率。
对于本领域技术人员而言,虽然说明了本发明的几个实施方式以及实施例,但这些实施方式以及实施例是作为例子而提出的,并不意图限定发明的范围。这些新的实施方式能够以其他各种方式实施,在不脱离发明的主旨的范围内能够进行各种省略、替换、变更。这些实施方式及其变形包含在发明的范围及主旨中,并且包含在权利要求书所记载的发明和其等效的范围内。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种智慧课堂辅助教学机器人
- 机器人智慧课堂辅助教学系统及方法