9轴双臂机器人
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及机器人领域,尤其是一种仿人体工程学设计9轴双臂机器人。
背景技术
当前喷涂工业机器人中,传统六轴机器人的结构如附图4拖拽操作的机器人,如果想到让其末端喷枪上下移动,需要第2、第3两个轴联动,且两个轴电机分担机械臂的自身重量,很难让操作者灵活操作。如果让其喷枪左右行走,需要至少第1、第2、第3三个轴联动,需要操作者两只手进行操作才能完成动作。当喷枪做圆弧或者直线运动喷涂时,操作者需要双手不断变换发力的位置,操作不够灵活,不符合人体工程学,拖拽喷涂的动作也与工人正常人工喷涂作业动作相差很远。而本发明可一只手臂控制一个机器臂作业,在右臂上装有护肘绑带,并且配备有手柄,完美的贴合人体手臂,操作灵活。两个机器臂相互配合完成工件的喷涂作业,保证质量提高效率。
传统六轴机器人对有内堂和狭小空间的特殊工件进行作业时,传统六轴机器人在拖拽示教时很难完成作业任务,而本发明的左臂具有花键丝杠,能让左臂喷枪伸缩作业和360度旋转喷涂,能完成内堂及对狭小空间工件的喷涂。
传统六轴机器人的有效工作范围与本发明同等尺寸的相对较下,传统的机器人在左右上下都能达到1.5米左右,但在前后的工作范围就相对较差,也就是0.3米左右,工作范围受限,而本发明,双臂的设计保证了左右上下的工作范围外,左臂加装的花键丝杠,还能让左臂喷枪完成前后1.5米范围内的喷涂,加大工作范围。
发明内容
本发明是一种仿人体工程学设计,拖拽示教、作业一体化的9轴双臂机器人,通过拖拽即可完成对机器人的程序设定,节省编程时间,操作更直观更简便。
本发明是一种仿人体工程学设计9轴双臂机器人还能进行远程控制,操作本发明对另外一台9轴双臂机器人进行随动,有效隔离危险、有毒、有害等环境,避免喷涂对人体的危害。
本发明在具备同样条件作业环境下。示教本发明时同时操作两台或两台以上仿人体工程学设计9轴双臂机器人,同时对其它几台机器人进行了示教编程,提高工作效率。
本发明在某些危险作业,比如高空,高粉尘,高温高污染的环境下。可将示教的操作者,远离危险环境。进行远程同步拖拽示教。
本发明在对较大工件作业时,可采用两台仿人体工程学设计9轴双臂机器人对称镜像作业,两台仿人体工程学设计9轴双臂机器人相向布置。拖拽一台示教即可完成整体作业。
优选的,效仿人体工程学设计,具有左臂(JL1-2)、右臂(JR1-5)、腰部旋转平台(JT1)和调节高度的升降平台(JT2),左右双臂和腰腿部相互配合,符合人工作业习惯。
优选的,腰部旋转平台(JT1)上有调节高度的升降平台(JT2),升降平台(JT2)上安装有把柄,带动丝杠滑台(JT2-1)上下移动。
优选的,升降平台(JT2)上有丝杠滑台且具有重力自补偿,平衡掉9轴双臂机器人本体的重量,维持高度不自降。
优选的,左臂(JL1-2)的末端是仿人体学的肩关节(JL1)左右转动,肘关节(JL2)带动着长枪左右移动,长枪上装有花键丝杠(JL2-1),能让喷枪前后移动和360度旋转作业。
优选的,右臂(JR1-5)的肩关节一(JR1)上下动作,肩关节二(JR2)左右转动,肘关节一(JR3)左右转动,肘关节(JR4)上下转动,腕关节(JR5)带动着喷枪进行360度自由旋转作业。
优选的,右臂肘关节一(JR3)的部位装有护肘绑带,腕关节(JR5)的部位装有手柄,拖拽示教中能完美的贴合人体手臂,单手控制,操作灵活。
优选的,本机器人的其中7轴关节部位均配置有电机,由电机提供助力,辅助人体的拖拽示教。电机减速机动作时产生的阻力和9轴双臂机器人本体产生的重力,在后台程序编写时通过动力学算法进行抵消。
本发明的有益效果:各关节部位动作直接采用电机进行助力,操作者拖拽示教动作灵活;更换工件编程简单,工人拖拽示教一次即可;机器人结构顺应人体工程学,应用顺手;可远程控制,操作一台本发明可让另外一台进行随动;可成对称镜像作业,两台仿人体工程学设计9轴双臂机器人相向布置。拖拽一台示教即可完成整体作业。
本发明除作为喷涂机器人应用以外,还可应用到涂胶行业。由腕关节带动着胶枪即可进行操作。
附图说明
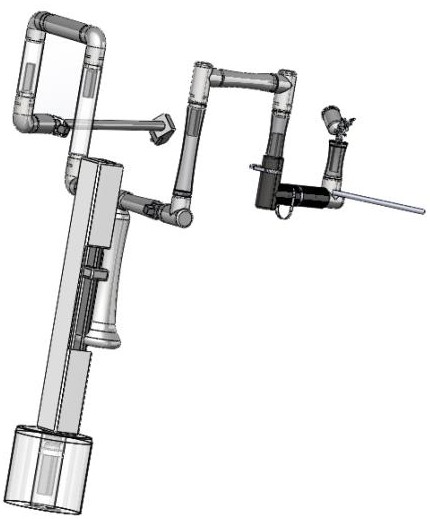
图1为仿人体工程学设计9轴双臂机器人的结构示意图
其中:JT1腰部旋转平台;JT2腿部升降平台;JL1左臂肩关节;JL2左臂肘关节;JR1右臂肩关节一(上下动作);JR2右臂肩关节二(左右旋转);JR3右臂肘关节一(左右旋转);JR4右臂肘关节二(上下旋转);JR5右臂腕关节
图2为左臂花键丝杠结构示意图
图3为腿部升降平台丝杠滑块结构示意图
图4拖拽操作的机器人
图5仿人体工程学设计9轴双臂机器人的示意图。
具体实施方式
下面将结合附图对本发明进行详细具体的描述
一种仿人体工程学设计拖拽示教、作业一体化的9轴双臂机器人
本发明是通过仿人体工程学设计,具有左臂(JL1-2)、右臂(JR1-5)、腰部旋转平台(JT1)与腿部升降平台(JT2)的9轴双臂机器人,分别在关节部位安装有驱动电机对动作进行助力,左右臂相互配合,结合腰腿部两平台,实现仿人工作业习惯。
优选的,本发明在腿部升降平台(JT2)处安装有丝杠滑块,配有电机自补偿本体重力,使机器人保持现位置不自降。
优选的,本发明腰部旋转平台(JT1),左右旋转,仿人体腰部动作,左右扭动,助力左右臂的动作。
优选的,本发明的左臂(JL1-2)仿人体的左右臂相互配合动作,左臂的末端是仿人体学的肩关节(JL1)左右转动,肘关节(JL2)带动着长枪左右移动,长枪上装有花键丝杠(JL2-1),能让喷枪前后移动和360度旋转作业。左臂细小且具有伸缩功能,对工件的内部和在工作范围内较远的部位作业。
优选的,本发明的右臂(JR1-5)仿人体的左右臂相互配合动作,右臂关节多,其中肩关节一(JR1)上下动作,肩关节二(JR2)左右转动,肘关节一(JR3)左右转动,肘关节(JR4)上下转动,腕关节(JR5)带动着喷枪进行360度自由旋转作业,作业范围广。
优选的,右臂肘关节一(JR3)的部位装有护肘绑带,腕关节(JR5)的部位装有手柄,拖拽示教中能完美的贴合人体手臂,单手控制,操作灵活。
优选的,本发明是一种仿人体工程学设计9轴双臂机器人还能进行远程控制,操作本发明对另外一台9轴双臂机器人进行随动,有效隔离危险、有毒、有害等环境,避免喷涂对人体的危害。
优选的,本发明除可应用到喷涂行业外,还可应用到涂胶行业。由腕关节带动着胶枪即可进行操作。
以上结合附图对本发明进行具体实施方式的详细供述,对于本领域技术人员,在不脱离本发明原理的情况下不需要付出任何的劳动即可联想到本发明的其他技术方案,应当指出,以本发明加以改变的其他技术方案也应涵盖在本发明的保护范围之内。
- 9轴双臂机器人
- 一种空间四轴双臂机器人及其收卷轴装卸装置