一种用于建筑行业室内装修的可移动机器人及其工作方法
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及建筑装修自动化技术领域,尤其是涉及一种用于建筑行业室内装修的可移动机器人及其工作方法。
背景技术
当前,全世界有超过1.8亿人从事建筑业,主要大国及发达国家建筑行业普遍面临人力成本高、招聘难、安全性和环保要求提升等相关管理问题。建筑机器人理论上来可能就是解决这一问题的方案之一,目前的建筑机器人主要为自动喷涂机器人,自动喷涂机器人在汽车领域已有多年应用,但由于建筑喷涂场景往往非标,既无法像汽车场景一样让机器简单按照固定的产路径运动;同时,涉及到门窗、门框、沟壑等非标准场景,传统的使用XYZ机器人的表现往往很难令人满意。
此外,当前建筑机器人的智能化水平较低、环境适应能力较差,而且只能完成一项工种作业,施工精度和施工效率均难以得到保证。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种用于建筑行业室内装修的可移动机器人及其工作方法,以实现智能化装修作业的目的。
本发明的目的可以通过以下技术方案来实现:一种用于建筑行业室内装修的可移动机器人,包括履带式移动底盘,所述履带式移动底盘连接有第一控制器,所述履带式移动底盘上安装有升降机构,所述升降机构的顶部安装有与机械臂相连接的第二控制器,所述机械臂的末端可拆卸地安装有末端执行器,所述第一控制器分别与后台BIM(BuildingInformation Modeling,建筑信息模型)端、第二控制器连接,所述第一控制器从后台BIM端获取BIM数据信息,并将BIM数据信息传输给第二控制器,所述第一控制器用于规划得到履带式移动底盘的运动路径,从而控制履带式移动底盘的移动;
所述第二控制器用于规划得到工作顺序,以及创建工作列表,从而控制机械臂以及末端执行器的运动。
进一步地,所述第一控制器上安装有急停开关、人机交互按钮和状态检测灯,所述急停开关用于实现紧急情况下的急停操作;
所述人机交互按钮配合显示面板,用于实现人机交互操作;
所述状态检测灯用于指示当前机器人的工作状态。
进一步地,所述升降机构的顶部设置有平台,所述第一控制器安装在平台上。
进一步地,所述平台上安装有收纳桶,所述收纳桶用于收集作业时产生的废料垃圾。
进一步地,所述末端执行器上设置有吸尘装置,所述吸尘装置包括与真空设备连接的吸尘桶,所述吸尘装置用于钻孔作业时吸纳钻孔落下的灰尘,并将吸纳的灰尘收集于吸尘桶内。
进一步地,所述机械臂的底部设置有基座,所述基座与第二控制器相连接。
进一步地,所述升降机构具体为剪式升降机构。
进一步地,所述末端执行器包括钻孔执行器、喷涂执行器、划线执行器、板材安装执行器中的一种或多种。
进一步地,所述机械臂具体为六自由度机械臂。
一种用于建筑行业室内装修的可移动机器人的工作方法,包括以下步骤:
S1、第一控制器从后台BIM端获取BIM数据信息,其中,BIM数据信息包括工作地图以及目标点坐标;
S2、根据获取的BIM数据信息,第一控制器结合当前履带式移动底盘的位置,规划得到履带式移动底盘的运动路径,以控制履带式移动底盘移动至工作位置;
S3、第一控制器将BIM数据信息传输给第二控制器,第二控制器以此规划得到工作顺序,并创建工作列表,配合升降机构使机械臂垂直移动至装修高度,之后控制调整机械臂的位姿、控制末端执行器的工作状态,以完成作业,其中,工作列表的内容包括钻孔尺寸、螺纹规格以及各个孔位的钻孔顺序;
墙面喷涂的位置、顺序及次数;
地面划线的位置、长度、粗细以及划线顺序;
板材安装的位置及顺序。
与现有技术相比,本发明具有以下优点:
一、本发明通过将履带式移动底盘与第一控制器连接,第一控制器与后台BIM端连接,使得第一控制器能够从后台BIM端获取BIM数据信息,从而规划出履带式移动底盘的运动路径,使得整个机器人能够准确地移动至目标地点,同时,第一控制器将获取的BIM数据信息传输给第二控制器,由第二控制器规划的到工作顺序、创建工作列表,配合升降机构使机械臂能够达到装修所需高度,并准确控制机械臂及其连接的末端执行器完成装修作业,以此实现智能化装修、提高施工精度的目的。
二、本发明通过在机械臂末端可拆卸地安装末端执行器,末端执行器包括钻孔执行器、喷涂执行器、划线执行器、板材安装执行器中的一种或多种,从而使得机器人能够完成不同工种作业,提高施工效率。
三、本发明通过在末端执行器设置吸尘装置、在升降机构顶部的平台上设置收纳桶,利用吸尘装置吸纳收集钻孔作业时吸纳钻孔落下的灰尘、利用收纳桶收集作业时产生的废料垃圾,进一步保证了机器人装修作业时的干净整洁。
附图说明
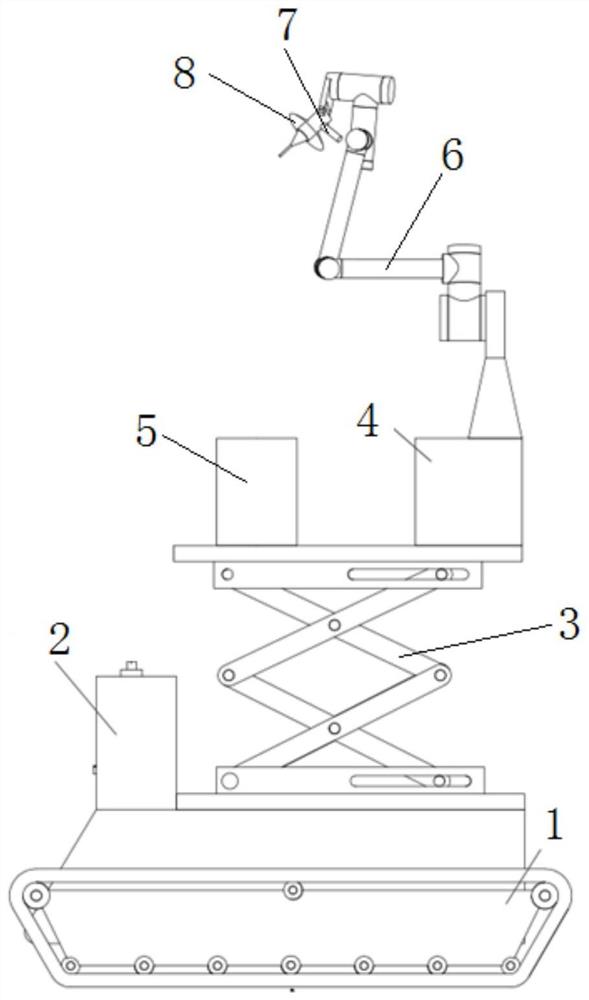
图1为本发明的侧视结构示意图;
图2为本发明的前视立体结构示意图;
图3为本发明的工作方法流程示意图;
图中标记说明:1、履带式移动底盘,2、第一控制器,3、升降机构,4、第二控制器,5、收纳桶,6、机械臂,7、末端执行器,8、吸尘装置。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。
实施例
如图1和图2所示,一种用于建筑行业室内装修的可移动机器人,包括履带式移动底盘1,履带式移动底盘1连接有第一控制器2,履带式移动底盘1上安装有升降机构3,升降机构3的顶部安装有与机械臂6相连接的第二控制器4,机械臂6的末端可拆卸地安装有末端执行器7,第一控制器2分别与后台BIM端、第二控制器4连接,第一控制器2从后台BIM端获取BIM数据信息,并将BIM数据信息传输给第二控制器4,第一控制器2用于规划得到履带式移动底盘1的运动路径,从而控制履带式移动底盘1的移动;
第二控制器4用于规划得到工作顺序,以及创建工作列表,从而控制机械臂6以及末端执行器7的运动。
其中,履带式移动底盘1主要包括电动机、轮子以及履带,其主要起到移动的作用,能够适应不同地形,使得机器人能够在较恶劣环境下移动;
升降机构3具体为剪式升降机构,其主要作用是使机械臂6以及末端执行器7达到满足天花板钻孔或轻型板材安装的高度要求。
此外,第一控制器2上安装有急停开关、人机交互按钮和状态检测灯,急停开关用于实现紧急情况下的急停操作;
人机交互按钮配合显示面板,用于实现人机交互操作;
状态检测灯用于指示当前机器人的工作状态。
升降机构3的顶部设置有平台,第一控制器2安装在平台上,平台上安装有收纳桶5,收纳桶5用于收集作业时产生的废料垃圾。
末端执行器7上设置有吸尘装置8,吸尘装置8包括与真空设备连接的吸尘桶,吸尘装置用于钻孔作业时吸纳钻孔落下的灰尘,并将吸纳的灰尘收集于吸尘桶内,在实际应用中,还可在吸尘桶内部安装电动搅拌棒,以构成搅拌桶,从而能够对涂料进行搅拌,防止涂料凝固、保持涂料的湿润;
为保证对末端执行器7进行准确定位,实际应用中可设置视觉感知系统,以进一步预先识别建立的参考点;同时还可设置用于对履带式移动底盘1导航定位的激光传感器系统,由此可进一步保证对于末端执行器7以及履带式移动底盘1的准确控制。
机械臂6的底部设置有基座,基座与第二控制器4相连接。
机械臂6具体为六自由度机械臂,具有电气动力连接,用来执行第二控制器4所下发的指令,完成达到指定目标点的位姿。
为实现根据需求完成不同工种作业的目的,末端执行器7包括钻孔执行器、喷涂执行器、划线执行器、板材安装执行器中的一种或多种。
将上述机器人应用于实际中,其具体的工作过程如图3所示,包括以下步骤:
S1、第一控制器从后台BIM端获取BIM数据信息,其中,BIM数据信息包括工作地图以及目标点坐标;
S2、根据获取的BIM数据信息,第一控制器结合当前履带式移动底盘的位置,规划得到履带式移动底盘的运动路径,以控制履带式移动底盘移动至工作位置;
S3、第一控制器将BIM数据信息传输给第二控制器,第二控制器以此规划得到工作顺序,并创建工作列表,配合升降机构使机械臂垂直移动至装修高度,之后控制调整机械臂的位姿、控制末端执行器的工作状态,以完成作业,其中,工作列表的内容包括钻孔尺寸、螺纹规格以及各个孔位的钻孔顺序;
墙面喷涂的位置、顺序及次数;
地面划线的位置、长度、粗细以及划线顺序;
板材安装的位置及顺序。
即首先通过访问BIM文件获取工作地图以及得到目标点坐标,然后履带式移动机构上的控制柜进行运动路径的规划,根据目标点的坐标获得工作顺序,进行工作列表的创建,然后进行工作,执行完成当前工作后,在规划下一个目标点路径,继续得到工作顺序,创建工作列表,进行工作,进入循环直到所有目标点全部完成工作任务。
- 一种用于建筑行业室内装修的可移动机器人及其工作方法
- 一种用于移动机器人的悬架装置及其工作方法