一种基于机器视觉的三维点胶针头的TCP标定方法
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及六轴工业机器人三维立体点胶技术领域,特别涉及一种基于 机器视觉的三维点胶针头的TCP标定方法。
背景技术
越来越多的机器人应用于智能制造领域,自动化点胶设备在智能制造领 域也应用的越来越广泛,而常规的平面2D点胶已经难以满足实际的需求。对 于复杂的3D曲面,通过六轴工业机器人实现复杂路径和多姿态的点胶过程是 目前应用最为广泛的方式。工具中心点TCP(ToolCenterPoint)标定误差对机器 人定位精度有较大的影响,而定位精度是影响机器人性能的重要因素;TCP 标定同时是机器人离线编程技术的基础。因此,如何快速、准确的标定TCP 就显得尤为重要。
目前已有的TCP标定方法主要是单约束点标定法,此类方法的主要缺点 在于需要人工操作,标定精度依赖于人工的操作经验,容易出现较大误差, 并且需要生产线完全停滞且耗时较久,对于点胶设备,由于需要频繁更换针 头,通过人工的方式将严重影响自动化生产线的生产效率。目前存在少数基 于外部测量的标定系统,如:
201811207015.X,一种可实现六自由度的TCP在线快速标定方法及装置, 对射式光电传感器的通断信号,需要根据特定轨迹进行标定,流程相对复杂且 成本较高。
201810640287.2,自动高精度非接触式机器人TCP标定方法,其是通过 超声波装置来实现,其算法相对复杂,且超声波装置成本较高。
201910538251.8,一种基于垂直反射的机器人TCP标定方法,提出了通 过平面镜作为辅助工具以及双目视觉系统实现TCP标定,但在应用中需要安 装在机器人末端,在实际中可能受到空间和结构限制不利于现场应用。
202010180243.3,一种基于视觉的机器人TCP标定方法,通过两个成90° 夹角的相机和一个固定的球体,实现TCP标定,移动过程中为每次步进1个 单位,这就大大限制了其工作效率,而需要固定的球体实际中应用不仅仅增 加了复杂性而且受到较大限制。
202010316233.8,一种弧焊机器人工具坐标系在线快速校准系统及其方法, 通过两个二维激光传感器,实现TCP标定,但其成本相对较高且对激光器的 安装要求较高。
这些方法虽然均能实现TCP标定,但这类系统通常造价相对较高或针对 实际应用不够简单灵活。因此针对实际应用中,亟待提出一种简单易操作, 价格低廉,耗时短效率高的三维点胶机器人TCP标定的方法。
发明内容
本发明要解决的技术问题是克服现有技术的缺陷,提供一种基于机器视 觉的三维点胶针头的TCP标定方法。
为了解决上述技术问题,本发明提供了如下的技术方案:
本发明一种基于机器视觉的三维点胶针头的TCP标定方法,步骤如下:
步骤一、首先在机械臂运动空间内部安装一个相机和镜头、两个面光源 以及一个棱镜,通过45°的棱镜实现在一个相机中观察到针头在另一个方向 上的位置;
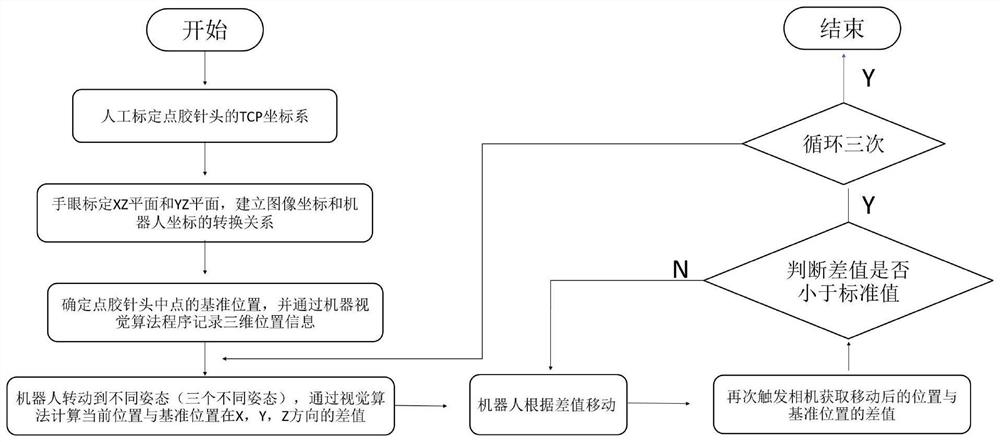
步骤二、人工标定点胶针头的TCP坐标系;
步骤三、控制点胶机器人末端点胶针头TCP坐标系Z轴垂直于点胶机器 人的XOY平面,机器人运动的X轴方向近似垂直于相机光轴,机器人运动的Y 轴近似平行于相机光轴,控制机器人移动到校针装置的合适位置,针头在相 机视野的中间,且在棱镜中成像清晰记录当前位置为P0(X0,Y0,Z0);
步骤四、根据人工标定的TCP坐标系,进行手眼标定,手眼标定XZ平面 和YZ平面,建立图像坐标和机器人坐标的转换关系,确定点胶针头中点的鞠 准位置,并通过机器视觉算法程序记录三维位置信息;
步骤五、将点胶机器人移动到P0位置,上位机触发相机拍照,通过视觉 算法得到针尖中心在经过手眼标定后在的位置为 Pbase0(Xbase0,Ybase0,Zbase0),作为点胶针头的基准位置称为姿态0,
步骤六、进行姿态校准,机器人转动到不同姿态,通过视觉算法计算当 前位置与基准位置在X、Y、Z方向的差值,机器人根据差值移动;
步骤七、重复上述步骤六两次,通过不断迭代移动的方法,使得针尖在 三次转到后都移动到接近点胶针头中点的基准位置;
步骤八、以四次TCP点胶针头中点在世界坐标系中坐标相等为条件来建 立方程组并求解,实现点胶针头中点TCP工具坐标系位置的标定;
步骤九、判断TCP标定结果是否满足要求,如果不满足设定的结果,可 以根据当前的TCP标定结果,重复进行步骤六、步骤七以及步骤八,通过标 定结果的迭代,降低TCP标定结果的误差。
作为本发明的一种优选技术方案,所述在步骤四当中,进行手眼标定时, 首先标定点胶机器人的XZ平面,此时标定点的Y值为固定值,通过手眼9点 标定方法,建立起点胶机器人XZ轴坐标与图像坐标的转换关系Txz,然后标 定点胶机器人的YZ平面也就是棱镜在相机中成像的面,此时标定点的X值为 固定值,同样通过手眼9点标定的方法,建立起点胶机器人YZ轴坐标与图像 坐标的转换关系Tyz。
作为本发明的一种优选技术方案,所述手眼9点标定算法的手与眼的对 应关系是通过视觉算法获取点胶针头的中心点与每次机器人根据人工标定的 TCP坐标系移动得到的机器人坐标一一对应,获取9组对应的机器人坐标和点 胶针头在图像坐标系下的图像坐标,从而进行手眼标定。
作为本发明的一种优选技术方案,所述点胶针头中点的获取方法,通过 视觉算法在XZ平面上找到直线特征L1,L2以及L3,得到L1和L3的交点C1 和L2与L3的交点C2,C1和C2的中心即为点胶针头在X,Z平面上的中点坐 标,通过同样的方法得到点胶针头在YZ平面上的中点,从而得到点胶针头中 点的三维坐标。
作为本发明的一种优选技术方案,所述在步骤六当中,操作如下:
首先控制机器人依据人工初始化的TCP坐标系绕某一方向进行转动,转 动角度需大于5°,作为姿态1,触发相机拍照,通过视觉算法得到针尖中心 的当前位置记为Pc1(Xc1,Yc1,Zc1),计算Pc1和Pbase0的差值为Δp(Δ x=Xc1-Xbase0,Δy=Yc1-Ybase0,Δz=Zc1-Zbase0),将Δp(Δx=Xc1-Xbase0, Δy=Yc1-Ybase0,Δz=Zc1-Zbase0)通过上位机通讯发送给机器人,机器人依 据Δp得到的三个方向的偏移量进行移动;
当机器人完成移动过程,再次触发相机获取当前位置与点胶针头基准位 置(姿态0)的偏移量,为Δp1(Δx1=Xc1-Xbase0,Δy1=Yc1-Ybase0,Δ z1=Zc1-Zbase0),判断Δp1三个方向偏移分量(Δx1是否小于标准值S,Δy1< 标准值S,Δz1<标准值S)是否均小于标准值S;
如果均小于标准值S,机器人将停止移动,并记录机器人移动后的位置。 如果有某个方向偏移分量大于标准值S,则继续将偏移数据发送给机器人,机 器人继续移动,直到最终的三个方向的偏移分量均小于标准值S为止。
作为本发明的一种优选技术方案,所述标准值S设置为0.05mm。
与现有技术相比,本发明的有益效果如下:
1:本发明通过机器视觉直接对点胶针头进行TCP标定,相对于现有方案 不需要借助中间物体(例如球体)来进行TCP标定,做到了柔性高,简单易 操作,精度高,可视化易于调试等优点,从而减少工业机器人停机维护时间, 提高工业生产线的效率和产能。
2:本发明通过视觉算法得到点胶针头中点在图像坐标下的坐标与对应的 机器人坐标,移动机器人,建立了9组对应关系的点,从而实现XZ平面和YZ平面的手眼标定,建立了图像坐标系与机器人坐标系的关系,在进行TCP 标定过程中,快速实现点胶针头中点到基准点位置的测量,使得通过一两次迭 代过程就可将点胶针头移动到基准点位置,相对每次步进1个单位的方法更 加快捷高。
3:本发明只需借助一个相机及镜头、两个光源以及一个棱镜的系统就可 实现点胶针头的快捷TCP标定,成本相对低。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本 发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
图1是本发明的TCP标定系统正视图;
图2是本发明的装置正视图;
图3是本发明的整体连接图;
图4是本发明的手眼标定法示意图;
图5是本发明的通过机器视觉算法获取针尖中点位置示意图;
图6是本发明的TCP四点法示意图;
图7是本发明的TCP标定方法流程图示意图;
具体实施方式
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述 的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
实施例1
如图1-7所示,本发明提供一种基于机器视觉的三维点胶针头的TCP标 定方法,步骤一、首先在机械臂运动空间内部安装一个相机和镜头,两个面 光源以及一个棱镜,通过45°的棱镜可以实现在一个相机中观察到针头在另 一个方向上的位置,相当于两个90°安装的相机,这样就可以实现对针头3D 位置的监测,如图1、2、3所示。
步骤二、人工标定工业机器人末端点胶针头的TCP坐标系;
步骤三、控制点胶机器人末端点胶针头TCP坐标系Z轴垂直于点胶机器 人的XOY平面,机器人运动的X轴方向近似垂直于相机光轴,机器人运动的Y 轴近似平行于相机光轴,控制机器人移动到校针装置的合适位置,针头在相 机视野的中间,且在棱镜中成像清晰,记录当前位置为P0(X0,Y0,Z0)。
步骤四、根据人工标定的TCP坐标系,进行手眼标定,首先标定点胶机 器人的XZ平面,此时标定点的Y值为固定值,通过手眼9点标定方法,建立 起点胶机器人XZ轴坐标与图像坐标的转换关系Txz,然后标定点胶机器人的 YZ平面也就是棱镜在相机中成像的面,此时标定点的X值为固定值,同样通 过手眼9点标定的方法,建立起点胶机器人YZ轴坐标与图像坐标的转换关系 Tyz。
这里的手眼9点标定算法的手与眼的对应关系是通过视觉算法获取点胶 针头的中心点与每次机器人根据人工标定的TCP坐标系移动得到的机器人坐 标一一对应,通过这样的方式就能获取9组对应的机器人坐标和点胶针头在 图像坐标系下的图像坐标,如图4所示,从而可以进行手眼标定。
点胶针头中点的获取方法,如图5所示,通过视觉算法在XZ平面上找到 直线特征L1,L2以及L3,得到L1和L3的交点C1和L2与L3的交点C2,C1 和C2的中心即为点胶针头在X,Z平面上的中点坐标,通过同样的方法得到 点胶针头在YZ平面上的中点,从而得到点胶针头中点的三维坐标。
步骤五、将点胶机器人移动到P0位置,上位机触发相机拍照,通过视觉 算法得到针尖中心在经过手眼标定后在的位置为 Pbase0(Xbase0,Ybase0,Zbase0),作为点胶针头的基准位置,称为姿态0。
步骤六、进行姿态校准,控制机器人依据人工初始化的TCP坐标系绕某 一方向进行转动,为保证精度,转动角度需大于5°,作为姿态1,触发相机 拍照,通过视觉算法得到针尖中心的当前位置记为Pc1(Xc1,Yc1,Zc1)。计算Pc1和Pbase0的差值为Δp(Δx=Xc1-Xbase0,Δy=Yc1-Ybase0,Δ z=Zc1-Zbase0),将Δp(Δx=Xc1-Xbase0,Δy=Yc1-Ybase0,Δz=Zc1-Zbase0) 通过上位机通讯发送给机器人,机器人依据Δp得到的三个方向的偏移量进行 移动,当机器人完成移动过程,再次触发相机获取当前位置与点胶针头基准 位置(姿态0)的偏移量,为Δp1(Δx1=Xc1-Xbase0,Δy1=Yc1-Ybase0,Δ z1=Zc1-Zbase0),判断Δp1三个方向偏移分量(Δx1是否小于标准值S,Δy1< 标准值S,Δz1<标准值S)是否均小于标准值S,针对点胶机器人一般S可以设 置为0.05mm,如果均小于标准值S,机器人将停止移动,并记录机器人移动 后的位置,如果有某个方向偏移分量大于标准值S,则继续将偏移数据发送给 机器人,机器人继续移动,直到最终的三个方向的偏移分量均小于标准值S 为止。
步骤七、重复上述步骤六两次,只是将机器人绕另外两个方向转动。通 过不断迭代移动的方法,使得针尖在三次转到后都移动到非常接近点胶针头 中点的基准位置(姿态0),如图6所示。
步骤八、以四次TCP点胶针头中点在世界坐标系中坐标相等为条件来建 立方程组并求解,也就是经典的“四点法”求解TCP,从而实现点胶针头中点 TCP工具坐标系位置的标定。
步骤九、判断TCP标定结果是否满足要求,如果不满足设定的结果,可 以根据当前的TCP标定结果,重复进行步骤六、步骤七以及步骤八,通过标 定结果的迭代,降低TCP标定结果的误差。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限 制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的 技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或 者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作 的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种基于机器视觉的三维点胶针头的TCP标定方法
- 一种点胶针头清洁机构、自动点胶机及点胶针头清洁方法