一种可搭载接触式检测设备的水下检测机械臂
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及水下机器人技术领域,特别涉及一种可搭载接触式检测设备的水下检测机械臂。
背景技术
随着科学技术的发展,人们开启了对水下结构物检测技术的全新探索与发展,水下机器人的出现便是其重大成果。目前,水下机器人主要是用于水下环境的探测,在探测的过程中采集各种水下数据,对于少部分应用于检测工作的水下机器人,因为受水下环境影响仅仅只能进行水下图像采集,而对于需要接触式检测的超声装置等便无法在水下使用。此外,由于水流的影响,水下机器人在运行过程中持稳能力不足,将导致各项检测数据不准确。
发明内容
本发明旨在至少在一定程度上解决现有技术中的上述技术问题之一。为此,本发明实施例提供一种可搭载接触式检测设备的水下检测机械臂,能够搭载接触式检测设备进行稳定的水下检测。
根据本发明实施例的可搭载接触式检测设备的水下检测机械臂,包括基座;检测部件,所述检测部件包括座体、用于将所述座体吸附在检测目标的至少一个吸附组件以及将检测设备安装在所述座体上的固定组件,所述吸附组件包括用于吸附在检测目标的吸盘,所述固定组件包括对检测设备进行夹持的夹持抵板;以及调节臂部件,所述调节臂部件包括伸缩臂,所述伸缩臂一端与所述基座铰接,以实现伸缩臂摆动,所述检测部件的座体与所述伸缩臂另一端铰接,以实现所述检测部件摆动。
在可选或优选的实施例中,所述检测部件安装有至少一个螺旋桨,用于为所述检测部件提供动力。
在可选或优选的实施例中,所述吸盘开设有单向裂口,所述座体在所述吸盘的单向裂口处安装有排水通道,所述螺旋桨安装在所述排水通道中,以将所述吸盘内的水分进行外排,从而使所述吸盘吸附在检测目标上。
在可选或优选的实施例中,所述排水通道安装有保护壳,以保护所述螺旋桨。
在可选或优选的实施例中,所述座体设置有供检测设备安装的安装槽,所述夹持抵板设置为两个且相对设置在所述安装槽中,所述夹持抵板的安装面通过弹性件安装在所述座体上,以使两个夹持抵板的夹持面夹紧检测设备。
在可选或优选的实施例中,所述座体安装有镂空槽,所述镂空槽安装有螺杆,所述螺杆穿至所述安装槽中以抵靠检测设备。
在可选或优选的实施例中,所述螺杆位于安装槽的一端安装有橡胶垫片。
在可选或优选的实施例中,所述可搭载接触式检测设备的水下检测机械臂还包括底座,所述基座转动连接在所述底座上。
在可选或优选的实施例中,所述底座设置有置物槽,用于存放检测设备主机或存储设备。
在可选或优选的实施例中,所述底座设置用于与水下机器人电连接的水下信号传输模块。
基于上述技术方案,本发明实施例至少具有以下有益效果:上述技术方案,通过调节臂部件,可以实现检测部件的多自由度调节,在检测部件中,吸盘能对检测目标进行吸附,后检测设备能进一步进行接触式检测或观察,检测设备通过夹持抵板进行固定,安全可靠。本发明实现对检测目标的接触式检测或观察,提升水下机器人检测项目的多样性。
附图说明
下面结合附图和实施例对本发明进一步地说明;
图1是本发明实施例的结构示意图。
具体实施方式
本部分将详细描述本发明的具体实施例,本发明之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本发明的每个技术特征和整体技术方案,但其不能理解为对本发明保护范围的限制。
在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
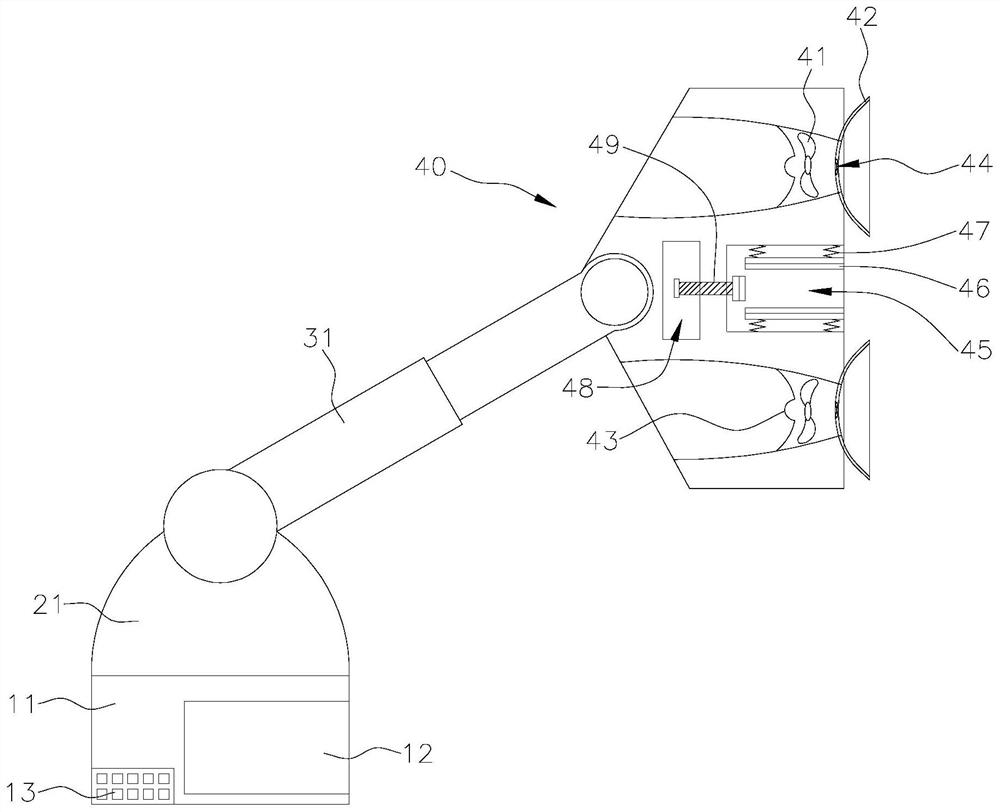
参照图1,一种可搭载接触式检测设备的水下检测机械臂,包括基座21、调节臂部件,以及检测部件40。其中,调节臂部件包括伸缩臂31,伸缩臂31一端与基座21铰接,以实现伸缩臂31摆动,检测部件40的座体与伸缩臂31另一端铰接,以实现检测部件40摆动。
优选的,可搭载接触式检测设备的水下检测机械臂还包括底座11,基座21转动连接在底座11上。可以理解的是,通过调节臂部件,可以实现检测部件40的多自由度调节,基座21可以沿底座11中心轴转动,实现检测部件40旋转,通过伸缩臂31可以将检测部件40伸长或缩短一定距离,方便灵活的进行水下检测作业。
检测部件40包括座体、用于将座体吸附在检测目标的至少一个吸附组件以及将检测设备安装在座体上的固定组件,吸附组件包括用于吸附在检测目标的吸盘42,固定组件包括对检测设备进行夹持的夹持抵板46。可以理解的是,在检测部件40中,吸盘42能对检测目标进行吸附,后检测设备能进一步进行接触式检测或观察,图中未出示检测设备,检测设备通过夹持抵板46进行固定。伸缩臂31与基座21之间采用球形铰接,伸缩臂31与检测部件40之间采用球形铰接,球形铰接能够多角度转动,可使伸缩臂31和检测部件40调节更灵活,提高可搭载接触式检测设备的水下检测机械臂的适用性能和灵活性,便于检测部件40贴合检测目标。
检测部件40安装有至少一个螺旋桨41,用于为检测部件40提供动力。可以理解的是,在进行水下检测时,先对检测部件40进行吸附固定工作,即,水下机器人机体到达指定检测位置保持水下悬浮状态,通过检测部件40两侧螺旋桨41提供动力,缓慢驱动水下机器人整体向检测目标靠拢,最终两侧吸盘42对检测目标进行吸附固定,检测部件40完成固定后,检测部件40内的检测设备进行检测。
对于吸附组件,本实施例共设置两个。具体而言,吸盘42开设有单向裂口44,座体在吸盘42的单向裂口处安装有排水通道,螺旋桨41安装在排水通道中,以将吸盘42内的水分进行外排,从而使吸盘42吸附在检测目标上,达到稳固吸附作用。同时,吸盘42也起到检测部件40与检测目标接触时的缓冲作用。另外,排水通道安装有保护壳43,以保护螺旋桨41,可以理解的是,保护壳43用于螺旋桨电机的存放,保护壳43为镂空状,保护壳43作为出水口,可保持排水通道流通性。本实施例中,螺旋桨41在运作时,一方面作为吸盘42的排水动力,另一方面作为机器人整体的驱动力,可以消除机械臂在与检测目标接触时由于反作用力造成的机身回弹。
座体设置有供检测设备安装的安装槽45,夹持抵板46设置为两个且相对设置在安装槽45中,夹持抵板的安装面通过弹性件47安装在座体上,以使两个夹持抵板46的夹持面夹紧检测设备,具体的,弹性件47为弹簧。当然,夹持抵板46的夹持面可固定橡胶垫片,避免对检测设备的损伤。
如图所示,座体安装有镂空槽48,镂空槽48安装有螺杆49,螺杆49穿至安装槽45中以抵靠检测设备。在进行检测作业前,安装槽45内事先通过其内两侧的夹持抵板46对检测设备(如超声检查探头)进行固定,后再镂空槽48处调节螺杆49,从而螺杆49带动进行伸缩,实现检测设备在安装槽45内的固定及深浅调节功能,使检测设备能够对不同的检测目标进行接触式检测,提高适应性。进一步的,螺杆49位于安装槽45的一端安装有橡胶垫片,当然,螺杆49位于安装槽45的一端安装抵压板,抵压板再安装橡胶垫片。
在其中的一些实施例中,底座11设置有置物槽12,用于存放检测设备主机或存储设备。置物槽12,当可搭载接触式检测设备的水下检测机械臂用于超声检测时可用于存放检测设备主机;当可搭载接触式检测设备的水下检测机械臂用于图像数据采集时可用于存放存储设备。置物槽12为密封防水存放空间,但留有通道可与安装槽45内的检测设备进行电连接。
另外,底座11设置用于与水下机器人电连接的水下信号传输模块13,水下信号传输模块13可以实现可搭载接触式检测设备的水下检测机械臂与水下机器人主体的有线连接,故而可以在控制水下机器人的同时,对可搭载接触式检测设备的水下检测机械臂及检测设备进行控制。
上面结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,在所述技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
- 一种可搭载接触式检测设备的水下检测机械臂
- 一种搭载于ROV的水下渗漏示踪检测设备及检测方法