自消毒机器人和用于对机器人消毒的方法
文献发布时间:2023-06-19 11:21:00
技术领域
本公开内容涉及机器人,并且特别地涉及自消毒机器人。本公开还涉及一种用于消毒机器人的对应方法,涉及一种计算机程序和用于执行该方法的计算机程序产品。
背景技术
我们正处于一个新时代的开端,其中协作型机器人和服务型机器人将成为我们日常生活的一部分。工厂内的协作型机器人,又称Cobots,现在已经在人类身边完成单调的工作。据预测,机器人将越来越多地用于食品和饮料、FnB、工业、制药实验室、农场、医院等生产线上。然而,机器人与人类(或人类消费的产品)之间的距离越来越近,暗示着对其卫生设计和抗细菌的表面特性有严格要求。
这些经消毒的表面的主要目的是防止有害微生物在机器人表面和工厂的其他地方生长和传播。现在,经消毒的表面通常是通过在某个时间间隔内使用例如有毒化学品清洗机器人来实现,这些有毒化学品还可以伤害装备。
使用服务型机器人的另一关键方面是移动性。将机器人放置在可能被污染的环境中的移动平台上,可以加速污染物的传播,因为细菌可以在机器人四处移动时被机器人携带。这个问题无法通过传统的清洗来解决。
由此,有必要改进消毒机器人的方式。特别地,有必要改进在机器人操作和服务期间消毒机器人的方式。
发明内容
因此,本公开的目的是缓解现有技术的至少一些缺点。其目的是提供一种防止有害微生物在机器人的外部表面上生长和传播的备选方式。特别地,其目的是提供一种对环境温和的解决方案,并且该解决方案还不会伤害机器人或工厂里的工作人员。
根据第一方面,本发明涉及一种自消毒机器人(本文简称为机器人),包括外部表面。该机器人包括至少一个光发射部件,该至少一个光发射部件被布置为用来自机器人内侧的消毒光照射外部表面的至少一部分。通过从机器人的内侧投射消毒光,可以提供对外部表面(或其选定的部分)的持续和全面的消毒,例如在服务或操作期间,包括当机器人正在四处移动时。该解决方案还允许对例如同样很难从外侧消毒的缝隙进行消毒。此外,机器人还可以在某种程度上处理周围的环境,并且特别地是处理围绕机器人的悬浮微粒(airborne particles)。
根据一些实施例,至少一个光发射部件被配置为通过从外部表面下面或从沿外部表面的侧面发射消毒光而从内侧照射外部表面(20)。因此,机器人外部(或外)表面上的灰尘和污染将不会防止消杀过程。这还允许在拥挤的环境中使用所提出的技术。
根据一些实施例,至少一个光发射部件包括内部光源,该内部光源被配置为发射布置在机器人内侧的消毒光。从而,照射系统本身被保护而不受外部影响。机器人的内部部分/体积还将在某种程度上被消杀,因为部分光线通常也将照射机器人的内部。
根据一些实施例,至少一个光发射部件包括光导,该光导包括孔口,其中光导被布置为引导来自外部光源的消毒光,通过光导并且通过孔口射出。因此,外部光导可以被用于若干机器人。同样,因为光源是在机器人外部,与被布置在机器人内部相比,如果光源被损坏,则更容易修复。
根据一些实施例,机器人被设计使得消毒光的至少一部分能够穿过外部表面的至少一部分。从而,定位在机器人的外部表面下的光源可以被用于对表面消毒。
根据一些实施例,至少一个光发射部件被布置为照射与机器人的一个或多个关节和/或接口相邻的外部表面的部分。所提出的技术提供了对整个结构,抑或仅对机器人的部分进行消毒的可能性,诸如敏感区域(动态和静态密封)或夹持器(gripper)。
根据一些实施例,外部表面至少部分地由外套所限定,并且其中光发射部件被配置为从外套内侧的位置或从集成在外套中的位置发射消毒光。
根据一些实施例,机器人包括光学部件,该光学部件被配置为沿外部表面传播消毒光,以将光引导到表面和/或将光聚焦在外部表面的部分上。
根据一些实施例,光学部件包括光导、光扩散材料和/或透镜。从而,整个外部表面(或其部分)可以使用有限数量的光发射部件而适当地被照射。对于苛刻的应用,光学部件还可以对敏感部分(诸如密封(动态、静态)、夹持器等)提供局部照射。
根据一些实施例,外部表面的一部分由密封装置所限定,并且其中至少一个光发射部件被至少部分地集成在密封装置中,或其中密封装置对消毒光是透明的,并且其中光发射部件被布置为从沿外部表面的密封装置的侧面或从密封装置的下面照射外部表面。从而,例如关节可以被消杀,在该关节处细菌和污物可以以其他方式进入机器人。
根据一些实施例,机器人包括控制单元,该控制单元被配置为控制至少一个光发射部件和/或光学部件,以利用来自机器人的内侧的消毒光照射外部表面的至少一部分。因此,照射可以被控制并且适于该应用。
根据一些实施例,消毒光具有200纳米至500纳米的波长。根据一些实施例,外部表面至少部分地被由污染物激活的光催化聚合物或玻璃所覆盖。继而,消毒光的波长就变得无关紧要。
根据一些实施例,机器人被安装在移动平台上,并且至少一个光发射部件被配置为将消毒光发射在上面放置移动平台的表面上和/或在移动平台的一个或多个运输装置上,以使得能够在移动平台的移动期间进行消杀。从而,机器人结构本身可以作为周围环境的(非接触)清洁工具而被使用,以对悬浮微粒、产品本身、周围的用具等消毒。
根据第二方面,本公开涉及一种用于对包括外部表面的机器人消毒的方法。该方法包括利用来自机器人的内部的消毒光照射外部表面的至少一部分。
根据一些实施例,其中照射是连续的、脉冲的或基于一个或多个预先确定的标准而触发的。从而,消毒可以取决于污染的程度而被调适,或仅在一天等的给定时间被激活,以提供有效的消杀。
根据一些实施例,方法包括基于一个或多个预先确定的标准来改变消毒光的强度和/或波长。从而,为了不对环境或人造成任何伤害,同时仍然提供有效的消杀,可以基于材料、人的存在等来调适消毒。
附图说明
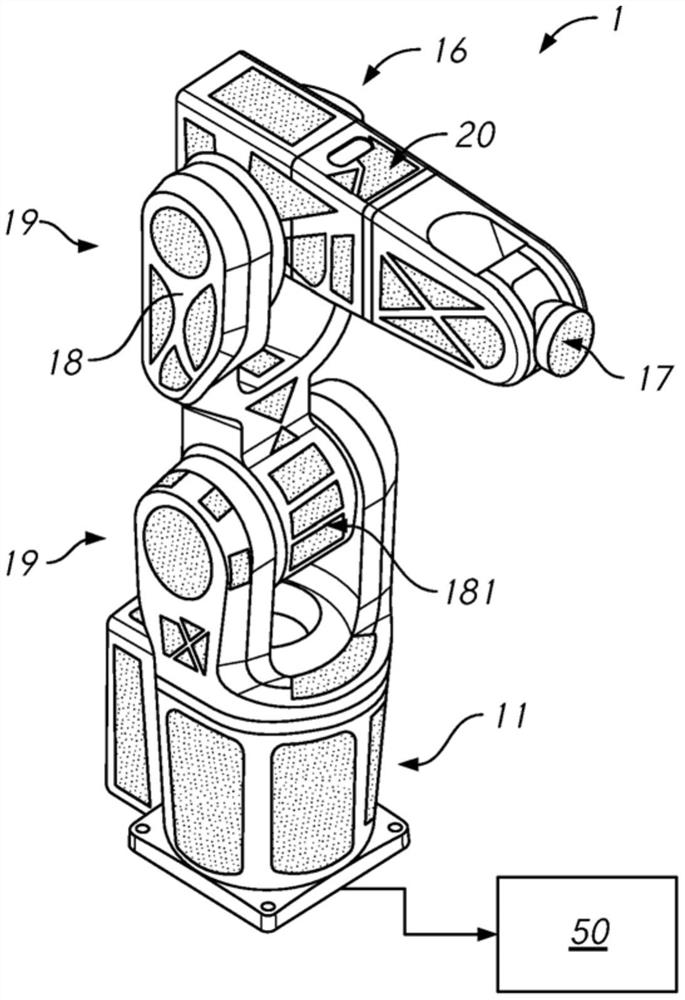
图1图示了自消毒机器人,该自消毒机器人被配置为用消毒光照射其外部表面的主要部分。
图2a至图2c图示了光发射部件的三个示例实施例。
图3图示了机器人部分的结构的示例。
图4a至图4c图示了在包括图3的结构的机器人部分中实施所提出的技术的第一示例实施例。
图5a至图5e图示了在包括图3的结构的机器人部分中实施所提出的技术的第二示例实施例。
图6a至图6c图示了自消毒机器人,其中仅关节被消毒。
图7图示了根据第二方面的用于对机器人消毒的方法。
具体实施方式
针对传统清洗的备选方法是使用紫外光(UV光)进行消毒。紫外光现在已经在食品工业中得到了广泛的应用。已经证明可以用高性能的紫外光源和装备可靠地消毒、清洁和处理水、空气和表面。从而,可以以经济和环保的方式减少或甚至避免化学品的使用。然而,紫外辐射可以损坏装备的聚合物部分,并且还会损害到人类。因此,由于健康风险,一般地应该避免让人类暴露于任何超过必要的紫外光。
紫外光的备选是蓝光,蓝光具有几乎一样好的消毒效果。蓝光技术被用于例如清洁室(例如,由Led Tailor innovation公司制造-www.LEDtailor.fi),并且已经证明了空气中微生物颗粒显著减少(对于小颗粒高达98%)。
然而,为了对表面进行适当的消毒,整个表面必须被照射。用于消毒的紫外和蓝光灯通常被安装在暴露区域上方(诸如天花板中或实验台上方)。使用紫外光实现对机器人足够程度的消毒可以是困难的,特别地在操作机器人的同时,因为机器人的暴露表面可以被物体、灰尘和污染所遮掩。使光达到缝隙等中也是困难的。
本公开提出了一种带有内置消毒布置的机器人,该消毒布置向机器人的暴露表面发射消毒光。根据本发明的一个实施例,从机器人的内侧发射消毒光,而不是从机器人的上面发射。其可以仅照射机器人最为暴露的区域,这通常是夹持器或基底,或可以照射整个机器人。
现将参考附图更详细地描述所提出的技术。
图1图示了自消毒机器人1的示例实施例,该自消毒机器人1被配置为用来自机器人1的内侧的消毒光照射其外部表面20的主要部分(如点状区域所图示)。在图1中,机器人1是工业机器人,包括一个与脚11共同地连接的机器人臂16。然而,所提出的技术可以用在任何工业机器人1上。在一些实施例中,机器人被安装在移动平台上。移动平台可以包括运输装置(例如轮或带),使得在操作期间机器人1可以四处移动。在操作中,机器人工具(诸如夹持器)通常在机器人臂16的外部分处被附接到接口17。机器人臂16包括一个或多个机器人臂区段,区段经由关节19和运动机构彼此连接,该运动机构适于使机器人臂16运动。每个运动机构通常包括电机单元和制动单元(未示出)。
机器人1包括外部表面20。外部表面20是机器人的表面,该表面与机器人1的外部直接接触。至少有一个光发射部件12(图2a至图2c)被布置为用来自机器人1内侧的消毒光照射外部表面20的至少一部分。例如,光发射部件12被布置在机器人1内侧,并且机器人或机器人1的一部分被覆盖有外壳(例如外套或壳体),该外套体对消毒光是透明的。应该注意的是,所提出的技术可以在机器人1或机器人1的单独部分中实施,诸如在机器人臂区段中、在移动机器人平台中或在机器人工具(诸如夹持器)中。
在一些实施例中,消毒光具有200纳米至500纳米的波长。在一些实施例中,消毒光是紫外光,即380纳米至500纳米。然而,如上所述,紫外光在所有情况中并不都是适合的。其可以使用强烈的蓝光(不在紫外光谱中),即200纳米至380纳米(例如365纳米)来代替紫外光,以获取至少几乎与紫外光一样好的效果。利用蓝光,可以在没有与紫外光相关联的健康风险的情况下将消毒光朝向人引导。
备选地,可以使用由污染物激活的可见光光催化作用。这暗示着一种物质(更具体地是一种由污染物激活的光催化聚合物)被置放在外部表面20上,并且与该物质接触的细菌在可见光下激活自身的光催化降解作用。因此,如果外部表面20至少部分地被由污染物激活的光催化聚合物或玻璃所覆盖,则消毒光可以是可见光(普通灯)。
在一些实施例中,至少一个光发射部件12被配置为通过发射来自外部表面20下面的消毒光,以从内侧照射外部表面20。例如,如图2a所图示,光发射部件12(这里包括光二极管形式的光源121)被布置在机器人1内侧,在外部表面20下方(或下面),发射消毒光通过外部表面20。继而,由光源121发射的消毒光穿过外部表面20,即穿过对消毒光透明的材料(例如食品兼容的聚合物)。换言之,在一些实施例中,机器人1被设计使得消毒光的至少一部分可以穿过外部表面20的至少一部分。例如,外部表面的部分可以对消毒光是透明的,该部分被定位在暴露于污染的区域处。
在一些实施例中,如图2b所图示,至少一个光发射部件12被配置为从侧面、即横向地沿外部表面20,照射外部表面20。继而,可以使用导光表面124形式的光学部件,将光线分布到外部表面20的选定部分。
如图2c所图示,发射消毒光的实际光源可以备选地被布置在机器人1外侧。继而,至少一个光发射部件12可以包括光导122,该光导122包括多个孔口123。光导122被布置为引导来自外部光源40的消毒光,通过光导122并且通过孔口123射出。因此,外部光源40可以被定位在机器人1外侧或外部。
在一些实施例中,机器人1包括光学部件14、124,光学部件被配置为沿外部表面20传播消毒光,将光引导到表面和/或将光聚焦在外部表面20的部分上。例如,光学部件可以是光扩散材料14(例如光扩散膜),该光扩散材料14可以被布置(例如胶合或喷涂)在外部表面20处以提供均匀的照射(见图2a、图2b或图2c)。备选地,可以使用透镜将消毒光聚焦在外部表面20的暴露部分上。
现将参考图3至图5描述在机器人1的机器人部分中,更具体地在机器人臂区段中,所提出的技术的示例实施方式。
在机器人中,具有高强度的承载结构的拓扑优化结构由于其重量轻,一般是所期望的。重量轻还是机器人的关键要求,该机器人被放置在移动机器人平台上。这样的拓扑优化结构通常通过增材制造(又称3D打印)而获取。用于承重结构的典型材料可以是金属材料(高强度钢、钛、铝及其合金)或复合材料。因此,工程上的高刚度材料可能是优选的。
为了允许光可以穿过最大的区域,使用非常高的比强度的拓扑优化结构还可以是有益的,因为它通常包括带有大开口的中空结构,用于在不遮掩内部光的情况下使光穿过结构。
图3图示了下机器人臂区段18的承重结构的示例,本文简称为“结构15”。下机器人臂区段18包括弧形圆柱形关节部分181,该关节部分被设计为包含对应关节19的齿轮和电机。当被安装时,圆柱形关节部分181的顶部基部和底部基部与下一个臂区段可移动地连接,而圆柱形关节部分181的侧面限定了机器人1的外部表面20的一部分。
图4a至图4c图示了圆柱形关节部分181的第一示例实施例。图4a图示了从上面(即从顶部基部)看到的圆柱形关节部分181,图4b图示了从侧面看到的圆柱形关节部分181,并且图4c图示了圆柱形关节部分181沿虚线A(图4a)的截面。
圆柱形关节部分181包括结构15的一部分和围绕结构15的该部分被包裹的外套13。发射消毒光的光源121(这里被实施为灯)被布置在结构15内侧。外套13是外壳(具有上边缘13a和下边缘13b),该壳体至少部分地由对消毒光透明的材料制成。因此,由光源121发射的光可以穿过外套13,并且从而从内侧照射外部表面20。换言之,在一些实施例中,机器人1包括中空结构15,并且至少一个光发射部件12包括被布置在中空结构15内侧的光源121。在一些实施例中,外部表面20至少部分地由外套13所限定,并且光发射部件12被配置为从外套13内侧的位置发射消毒光。在一些实施例中,外套13由光扩散材料制成,由此消毒光均匀地被分布在由外套13所限定的外部表面20处。由于遮掩效应,与圆柱形关节部分181的其余相比,结构15从外侧可以显得稍暗。
图5a至图5e图示了圆柱形关节部分181的第二示例实施例。图5a图示了从上面(即从顶部基部)看到的圆柱形关节部分181,图5b图示了从侧面看到的圆柱形关节部分181,并且图5c图示了圆柱形关节部分181沿虚线A(图5a)的截面。图5d图示了从上面斜对角看到的圆柱形关节部分181,并且图5e示出了图5c中截面B的放大图,进一步详细图示了光源(这里图示为二极管)121的放置。
本实施例与第一实施例的不同之处在于,光发射部件包括多个光源121,这里图示为集成在外套13中的光二极管。二极管被布置为从机器人1内侧照射外部表面20。换言之,在一些实施例中,光发射部件12被配置为从外套13内侧的位置或从集成在外套13中的位置发射消毒光。
使用服务型机器人的另一关键方面是移动性。如上所述,将机器人放置在可以被污染的环境中的移动平台上,可以被预见为将污染物传播至整个工厂的最快方式。在这里,再一次地,使用消毒光的连续消毒可以是应用的“必要条件”,并且与日常冲洗解决方案相比,是一种决定性的优点。例如,可以布置光发射部件12对机器人1下方和围绕机器人1的表面消毒。这对于定位在移动平台上的机器人1是特别地相关的,即平台使机器人1能够在运行期间四处移动。换言之,在一些实施例中,至少一个光发射部件12被配置将消毒光发射在上面被置移动平台的表面上和/或在移动平台的一个或多个运输装置上,以使得能够在移动平台的移动期间进行消杀。为了实现这一目的,光发射部件例如被布置为从移动平台的垂直侧面斜下地发射光。
在一些实施例中,机器人1包括或被连接到控制单元50。控制单元50包括处理器和存储器。控制单元50例如是外部计算机或机器人1的机器人控制器。存储器可以包括计算机程序,其中计算机程序包括计算机程序代码,以使控制单元50或与控制单元50相连接的计算机控制至少一个光发射部件和/或光学部件14、124,以利用来自机器人的内侧的消毒光照射外部表面的至少一部分。更具体地,控制单元50被配置为执行将在下文中描述的方法。程序可以被存储在计算机可读介质上(诸如记忆棒或CD ROM)。计算机程序产品可以包括存储在这样的计算机可读介质上的计算机程序代码,以在计算机程序代码由控制单元50或连接到控制单元50的计算机执行时,执行结合图7所描述的用于消毒机器人的方法。
图6a图示了自消毒机器人1的另一个示例实施例,其中仅机器人1的夹持器和关节19的动态密封被消毒。在该示例中,冲洗区域(例如由不锈钢制成)未被照射。取而代之地,仅特别难以通过常规清洗达到的动态密封被消杀,因为如果细菌意外地进入关节,密封将防止关节面的清洗,这在高负载时可以发生。照射可以通过使用蓝色LED或另一光源来完成,该另一光源被布置为环形或以覆盖密封垫的被污染区域的方式被布置。继而,最终设计将包括不锈钢机器人,该不锈钢机器人在不同的轴线或密封垫中有蓝色发光环。
换言之,在该示例中,至少一个光发射部件12(图6b、图6c)被布置为照射与机器人1的一个或多个关节19和/或接口17相邻的外部表面20的部分。因为污物和细菌可以在关节19处进入机器人,所以这些区域通常是暴露的。
图6b是关节19的一部分的横截面的概念性图示。关节通常包括两个部分19a、19b,被布置为在这两个部分之间有相对移动。每个部分包括轴承结构15和外套13。密封垫(本文中被称为密封装置30)通常被布置在关节部分19a、19b之间的间隙中,或者更具体地在它们的外套13之间,以防止在工作或冲洗期间,流体或其他材料进入关节19,并且还避免流体(诸如油脂)可以从关节19中流出,并且潜在地污染正在被加工的食品。
换言之,外部表面20在该示例中是由外套13和密封装置30两者所限定。密封装置30对消毒光线是透明的。光发射部件12被布置在外套13的边缘13a处,该外套13面向密封装置30。从而,部分19a、19b之间的间隙被消毒。继而,消毒光的至少一部分将穿过密封装置30,并且照射由密封装置30所限定的外部表面20的一部分。换言之,光发射部件12被布置为(横向地)从密封装置3的侧面(沿外部表面20)或从密封装置30下面照射外部表面20。
图6c中图示了光发射部件12的备选放置。在该示例中,光发射部件12被集成在密封装置30中,并且从下面照射由密封装置30所限定的外部表面20的部分。图6a和图6b仅举例说明了可以如何放置光发射部件12以照射由密封装置30所限定的外部表面20。光发射部件12可以备选地以其他方式布置(例如,光发射部件可以仅部分地被集成在密封装置30中)。
图7图示了一种用于对包括外部表面20的机器人1消毒的方法。该方法在机器人1的正常运行期间,抑或在清洁和/或服务期间被执行。该方法通常在机器人的控制系统中被实施,诸如在机器人控制器50中(图1)。
该方法的步骤可以被限定在计算机程序中,计算机程序包括指令,该指令当程序被处理器(例如控制单元50的处理器)执行时使控制单元50实现该方法。该方法的步骤还可以被限定在计算机可读介质中(例如,控制单元50的内部存储器和/或任何其他存储器中)。计算机可读介质包括指令,该指令当由控制单元50执行时使控制单元50实现该方法。
该方法包括用来自机器人1的内部的消毒光照射S1外部表面20的至少一部分。照射可以是连续的、脉冲的或仅基于一个或多个预先确定的标准而触发的。例如,照射S1可以取决于污染的程度而被调适。例如,消毒光可以是闪烁的、频闪的,以实现不同情形下的最优消毒。在一些实施例中,仅在一天中的给定时间(例如在夜间)触发照射。
在一些实施例中,方法包括基于一个或多个预先确定的标准来改变S2消毒光的强度和/或波长。例如,预先确定的标准从监测污染的类型和程度的传感器中得到输入。预先确定的标准还可以包括时间表(schedule),使得在白天/夜晚的不同时间改变照射。例如,强度和波长可以基于材料、人的存在、污染的程度等而被改变。例如,在晚上没有人的时候,可以使用消毒效果更好的紫外光。
本发明不限于上述优选实施例。可以使用各种备选、修改和等同物。因此,以上实施例不应该被视为限制本发明的范围,本发明的范围由所附权利要求限定。
- 自消毒机器人和用于对机器人消毒的方法
- 消毒机器人及消毒机器人的消毒方法