全自动安装和触点接通电构件
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及用于安装和触点接通具有电接口和处理点的电构件的方法。
本发明还涉及用于控制安装装置的控制装置的控制程序,其中,控制程序包括机器代码,机器代码能够由控制装置直接执行,其中,通过控制装置执行机器代码引起控制装置运行安装装置。
本发明还涉及用于控制安装装置的控制装置,其中,控制装置利用这样的控制程序编程,从而使得通过控制装置执行机器代码引起控制装置运行安装装置。
本发明还涉及用于抓取、安装和触点接通电构件的安装装置,构件具有电接口和处理点,其中,安装装置具有这样的控制装置。
本发明还涉及通过安装装置的控制装置在构件的抓取和安装的范畴中在驱控安装装置时以及在构件的电接口的电连接的范畴中构件的数据结构的应用。
背景技术
对于电构件的自动安装需要多个数据。这些数据在现有技术中通常不存在或仅存在一部分。能够用作为自动安装的基础的专门技术方面的专用标识不存在。很少存在的信息常常是非结构化的并且必须人工记录到数据库中。
从EP 3 260 244 A1中已知了用于安装和触点接通电构件的方法,其中,构件具有电接口和处理点。安装装置的控制装置已知关于安装装置的机器坐标系的相应的构件的位置和定向。随后,控制装置驱控安装装置,使得按规定地安装构件并且按规定地电连接。
发明内容
本发明的目的在于,提出一种可行性,借助于其能够以简单的方式实现电构件的自动安装和触点接通。
该目的通过具有权利要求1所述的特征的用于安装和触点接通电构件的方法实现。根据本发明的方法的有利的设计方案是从属权利要求2至8的内容。
根据本发明,提出用于安装和触点接通具有电接口和处理点的电构件的方法,其中,
-在抓取相应的待输送给安装装置的构件之前,给安装装置的控制装置提供与相应的构件相关联的信息,
-关于相应的构件的构件坐标系,与应相应的构件相关联的信息对于相应的构件的电接口相应地包括电接口的位置、电接口的定向和相关的长度,并且对于处理点至少包括处理点的相应的位置和处理的类型并且优选地也包括处理点的相应的定向,
-关于安装装置的机器坐标系,控制装置已知相应的构件的位置和定向,
-控制装置根据相应的构件在机器坐标系中的位置和定向将通过与相应的构件相关联的信息限定的位置和定向换算到机器坐标系中,
-控制装置在驱控安装装置时,在相应的构件的抓取和安装的范畴中考虑类型和换算到机器坐标系中的位置,并且如果存在的话还考虑相应的构件的处理点的换算到机器坐标系中的定向,并且
-控制装置在驱控安装装置时,在相应的构件的电接口的电连接的范畴中考虑换算到机器坐标系中的位置和定向和相应的构件的电接口的相关的长度。
通过与相应的构件相关联的信息对于处理点来说至少包括其相应的位置和处理的类型和优选地还包括其相应的定向,能够以简单的方式自动实现借助于合适的夹具等抓取相应的构件,并且输送待安装的结构单元至期望的位置。特别地,处理的类型能够规定能够利用哪种类型的处理工具抓取相应的构件。例如,能够规定是否应该根据钳形抓取的类型或借助于真空吸爪进行抓取。位置给出相应的处理点在哪个位置。如果需要,类似的实施方案适用于定向。
通过与相应的构件相关联的信息对于相应的构件的电接口相应地包括其位置、其定向和相关的长度,能够以简单的方式实现通知控制装置配合接口或可能在固定保持的配合接口的情况下构件必须运动至哪个地方(位置)、沿哪个方向(定向)运动和运动多远(相关的长度)。配合接口例如能够是单个导体。然而,其它的设计方案也是能够考虑和可行的。
可以说,与相应的构件相关联的信息代表了相应的构件的电气描述,需要该电气描述以便能够自动安装和触点接通相应的构件。
构件自身能够是基本的构件,例如各个夹具。也能够是复杂的构件例如夹具组、保护开关、供电装置、外围构件等。
通过关于控制装置的机器坐标系控制装置已知相应的构件的位置和定向,能够以简单的方式实现将首先仅在构件坐标系中限定的构件的长度和定向变换(换算)到机器坐标系中。
优选地,与相应的构件相关联的信息具有全体构件上统一的数据结构。由此,不仅简化了通过控制装置处理与构件相关联的信息,还由此建立标准化、统一并且因此相对可靠的信息的。特别地,统一的数据结构能够构造为数据容器。
优选地,与相应的构件相关联的信息附加地完整地包括关于相应的构件的功能的信息。特别地,在通过用户智能检查的范畴中,这些信息能够是有利的。
优选地,与相应的构件相关联的信息附加地包括关于相应的构件的电接口的类型和/或功能的信息。这些信息还进一步使得自动安装和触点接通容易。例如,能够关于相应的电接口的类型附加地存在的信息为,相应的电接口是否是拧紧夹具、切断夹具、笼式张力弹簧、触靴或触头。关于相应的电接口例如能够附加地存在的信息为,是否是用于供应电势、时钟接口、数据接口等的接口。
能够以不同的方式和方法使得控制装置已知相应的构件的关于机器坐标系的位置和定向。例如,可行的是,在限定的位置处并且沿限定的方向将相应的构件输送至安装装置,并且控制装置已知该位置和该定向。替代地可行的是,将相应的构件的位置和定向传送到单独用于相应的构件的控制装置。替代地,也可行的是,控制装置在输送相应的构件时检测传感器数据,并且根据传感器数据得出相应的构件的位置和定向。
该目的还通过具有权利要求9所述的特征的控制程序实现。根据本发明,通过控制装置执行机器代码引起控制装置根据本发明的方法运行安装装置。
该目的还通过具有根据权利要求10所述的特征的控制装置实现。根据本发明,控制装置利用根据本发明的控制程序编程,使得通过控制装置执行机器代码引起控制装置根据本发明的方法运行安装装置。
该目的还通过具有权利要求11所述的特征的安装装置实现。根据本发明,安装装置包括根据本发明的控制装置。
该目的还通过具有根据权利要求12所述的特征的安装装置的控制装置通过构件的数据结构的应用来实现,该应用的有利的设计方案是从属权利要求13和14的内容。
根据本发明,数据结构包括与构件相关联的信息。关于构件的构件坐标系,信息对于构件的电接口分别包括其位置、其定向和相关的长度,并且对于构件的处理点至少包括其相应的位置和处理的类型并且优选地包括其相应的定向。
优选地,数据结构还附加地完整地包括关于构件的功能的信息。替代地或附加地,数据结构附加地包括关于构件的电接口的类型和/或功能的信息。
附图说明
根据下面结合附图详细阐述的实施例的说明,清楚和明白易懂地阐述了本发明的上述特性、特征和优点以及实现的方式和方法。在此示意性示出:
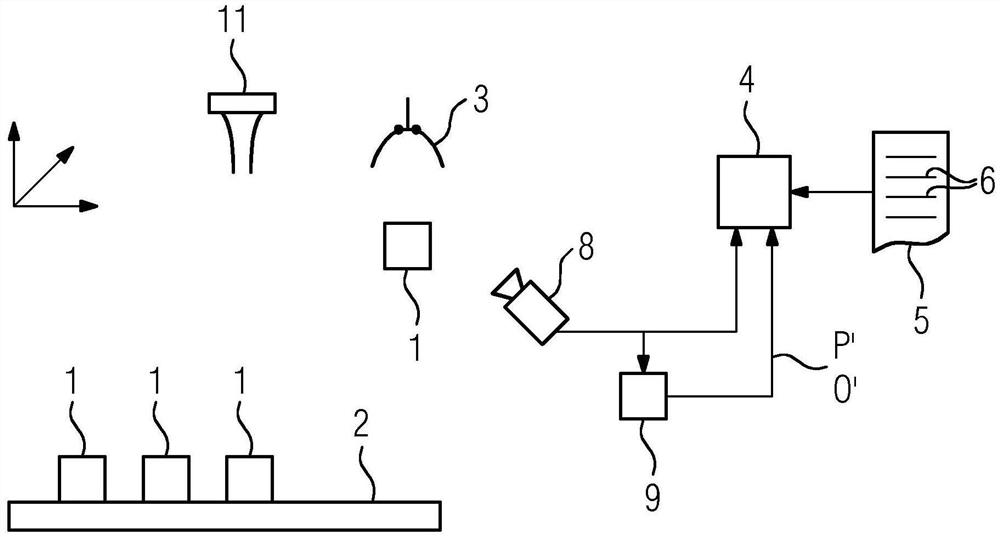
图1是安装装置,
图2是流程图,
图3是构件,并且
图4是数据结构。
具体实施方式
根据图1,应当借助于安装装置以自动的方式将构件1安装在较大的复杂的结构单元2上。为了该目的,安装装置具有处理装置3,借助于其将构件1单独在其相应的确定地点上安装到较大的结构单元2处。
安装装置还包括控制装置4。控制装置4控制安装装置。控制装置4利用控制程序5编程。控制程序5包括机器代码6,其能被控制装置4执行。通过控制装置4执行机器代码6引起控制装置4根据之后详细阐述的方法运行安装装置。
在自动安装的范畴中,将构件1依次输送给安装装置。图1纯示例性示出了这样的情况,其中,已经安装了三个构件1并且正需要安装另一个构件1。构件1的输送能够在控制的情况下通过控制装置4实现。然而也可行是,另外输送构件1给安装装置。
为了能够按规定地安装另外的构件1,根据图2所示,控制装置4首先在步骤S1中提供关于相应的构件1的信息I。之后结合图3和4详细地阐述信息I。
根据图3,构件1具有多个处理点7。处理点7的最小数量是1。对此,相应一致地在图3仅示出唯一的处理点7。然而在许多情况下存在多个处理点7。
根据图4,信息I包括处理点7的数量N。此外,信息I对于每个处理点7来说包括至少其相应的位置P并且优选地还包括其定向O。位置P和定向O关于构件1的构件坐标系。图3纯示例性示出相应的直角的笛卡尔坐标系的原点和三个相互正交的方向。此外,信息I对于每个处理点7包括其类型T。类型T给出的是,能利用哪个类型的处理装置3在该处理点7抓取相应的结构元件1。此外,信息I能够对于相应的处理点7还包括其大小、例如直径。
信息还包括与处理点7无关的其他说明处理点。之后还会进一步阐述该信息I。
在步骤S2中,控制装置4已知输送的构件1的位置P’和定向O’。位置P’和定向O’是关于机器坐标系的,即关于安装装置的构件运动在其中的坐标系。图1纯示例性示出了相应的直角的笛卡尔坐标系的原点和相互正交的方向。
控制装置4能够以不同的方式和方法已知输送的构件1的位置P’和定向O’。例如,可行的是,在限定的位置处并且沿限定的定向将构件1输送至安装装置。在该情况下,仅需要控制装置4例如在参数化的范畴中一次性预先给定其地点和定向。替代地可行的是,将构件1的位置P’和定向O’单独传输至控制装置4。例如能够存在传感器装置8(例如相机系统或激光扫描仪),借助于其在输送构件1时检测传感器数据。可行的是,将传感器数据直接输送至控制装置4。在该情况下,控制装置4经由传感器装置8检测相应的传感器数据,并且能够由此根据传感器数据得出输送的构件1的位置P’和定向O’。替代地,传感器装置8能够分配给评估装置9。在该情况下,评估装置9根据由传感器装置8检测的传感器数据得出输送的构件1的位置P’和定向O’并且单独为输送的构件1传输至控制装置4。
在步骤3中,用于各个处理点7的控制装置4将其位置P和定向O从构件坐标系变换到机器坐标系。因此,进行相应的换算。这是可行的,因为能够利用机器坐标系中的输送的构件1的位置P’和定向O’实现从构件坐标系中的坐标到机器坐标系中的换算。相应的换算对于本领域技术人员是普遍已知的。
在步骤S4中,控制装置4随后驱控处理装置3,从而使处理装置在具体的处理点7抓取待输送的构件1。随后,控制装置4在步骤S5中通过相应地驱控安装装置的位置调节的轴(轴未示出)将构件1定位到结构单元2所期望的地点并且由此安装。由此,控制装置4在此考虑处理点的类型,即其选择“正确的”处理装置3和/或其借助于处理装置3在适用于处理装置的3的处理点7处抓取待输送的构件1。显而易见地,控制装置4不仅在抓取、还在安装构件1时同样考虑变换到机器坐标系中的位置,因为其否则不能够将处理装置3引导至正确的位置处。如果存在,对于变换到机器坐标系中的处理点7的定向同样适用。
根据图3的示意图,构件1还具有电接口10。电接口10的最小数量是1。在此,相应一致地,在图3中仅示出单个电接口10。然而在多数情况下存在多个电接口10。
根据图4,信息I还包括电接口10的数量M。此外,信息I关于每个电接口10至少包括其相应的位置P、其定向O和相关的长度l。值P和定向O是关于构件1的构件坐标系。在步骤S1中,控制装置4也已知这些信息。因此,控制装置4能够在步骤S6中(类似于步骤S3)也为各个接口10将其位置P和定向O从构件坐标系变换到机器坐标系中。相关的长度l的变换不是要求的。因为相关的长度l保持不变。
在步骤S7中,控制装置4随后驱控处理装置3或另一个装置11,从而使得电接口10单独或成组地、也能够使所有的电接口10一起触点接通。例如,控制装置4能够为了触点接通单个的电接口10将合适的导线引入到该电接口10中。必须将导线引入到该电接口10的位置对于控制装置4来说由于相应的电接口10的位置P而是已知的。必须将导线引入到该电接口10中的方向对于控制装置4来说由于相应的电接口10的定向O是已知的。相关的长度l例如能够说明,必须将导线引入到该电接口10中多远。
因此,控制装置4在驱控安装装置时在构件1的电接口10的电连接的范畴中考虑构件1的电接口10的变换到机器坐标系中的位置和定向和相关的长度l。
与相应的构件1相关的信息I通常不取决于相应的构件1地嵌入到图4所示的数据结构中。信息I也能够显而易见地从构件1到构件1地相互区分。然而优选地,数据结构在全体构件上是统一的。特别地,数据结构能够构造为数据容器。
可行的是,与相应构件1的相关联的仅是迄今为止阐述的信息I。然而,优选地,相应的构件1关联附加的另外的信息I’、I”。另外的信息I’、I”同样嵌入到图4的数据结构中。
例如,另外的信息I’能够整体包括相应的构件1的功能,即例如是否涉及夹具、外围组件、电源、保护开关等。信息I”关于相应的构件1的相应的电接口10。其例如能够描述相应的电接口10的类型和/或功能。对于相应的电接口10的类型,另外的信息I”例如能够描述的是,相应的电接口10是否是拧紧夹具、笼式张力弹簧、切断夹具、伸出超过剩余的构件1的针等。其也能够描述相应的电配合接口(例如导线)应当具有何种横截面或横截面区域、导线是否应该绝缘等。对于相应的电接口10的功能,另外的信息I”例如能够描述相应的电接口10是否是信号接口、供电接口、时钟接口等。
总之,本发明因此涉及以下内容:
用于安装和触点接通电构件1的安装装置的控制装置在抓取相应的待输送给安装装置的构件1之前,提供与相应的构件1相关联的信息I。关于相应的构件1的构件坐标系,对于相应的构件1的电接口10,信息I分别包括其位置P、其定向O和相关的长度l,并且对于相应的构件1的处理点7,信息至少包括其相应的位置P和处理的类型并且优选地也包括其i相应的定向O。控制装置4在关于机器坐标系方面已知相应的构件1的位置P’和定向O’。控制装置根据相应的构件1在机器坐标系中的位置P’和定向O’将通过与相应的构件1相关联的信息I限定的位置P和定向O换算到机器坐标系中。控制装置在抓取和安装相应的构件1时考虑类型和换算到机器坐标系中的位置P、并且在存在的情况下也考虑处理点7的换算到机器坐标系中的定向O。对于电接口10的电连接,控制装置4考虑电接口10的换算到机器坐标系中的位置P和定向O和相关的长度l。
本发明具有众多优点。特别地,从建立信息I和其到相应的构件1的关联开始,能够实现信息I的持续的自动评估。信息I以标准化的数字处理的形式提供。
尽管通过优选的实施例在细节上详细地阐述并描述了本发明,但本发明并不局限于所公开的实例,并且在不脱离本发明的保护的范围内本领域的技术人员能够推到出其他变体方案。
- 全自动安装和触点接通电构件
- 一种用于全自动化安装通电软管的紧固设备