机器人关节结构及其组装方法
文献发布时间:2023-06-19 11:24:21
技术领域
本申请涉及机器人技术领域,尤其涉及一种机器人关节结构及其组装方法。
背景技术
随着机械自动化程度的提高,各种机器人广泛应用于各个领域,已知的工业机器人包括由多节机械臂经机器人关节结构依次连接的[上海捷勃特机器人有1] 多关节型机器人。机器人关节结构是机械臂设计中常用的一种驱动结构,机器人关节会影响机器臂的局部外观尺寸、精度、效率、刚度、运行速度、走线方式和装配工艺。一般的机器人关节结构主要由电机、减速机、输入法兰和输出法兰组成。
谐波减速器是机器人关节中常见的减速机类型,因其体积小、重量轻、精度高、传动比大、传动效率高,在负载较小的机器人关节中应用的非常普遍。
谐波减速机主要由刚轮、柔轮和波发生器三种部件组成,按照柔轮的形状分为杯型和礼帽型。每种型式的谐波减速机在机器人关节中根据输入部件、输出部件和固定部件的不同又衍生出若干种机器人关节结构。
常见的由谐波减速机衍生出来的机器人关节结构包括以下几种。
第一种机器人关节结构由电机、电机过渡法兰、礼帽型谐波减速机、输入法兰和输出法兰组成。输入法兰与礼帽型谐波减速机的刚轮侧连接,电机通过电机过渡法兰安装在输入法兰上,电机轴与谐波减速机的波发生器直接连接,输出法兰与谐波减速机的柔轮侧连接。然而这种形式的机器人关节结构具有如下缺点:如果输入法兰与机架是一体式的,则没有办法形成子装配体,装配时只能一件一件地安装,比较繁琐。而如果输入法兰与机架是分离式的,则由于装配关系,输入法兰的径向尺寸必须足够大。
第二种机器人关节结构由电机、过渡轴、礼帽型谐波减速机、输入法兰和输出法兰组成。电机安装在[上海捷勃特机器人有2] 输入法兰上,输入法兰与礼帽型谐波减速机的柔轮侧连接,电机通过过渡轴与谐波减速机的波发生器连接,输出法兰与谐波减速机的刚轮侧连接。然而,这种形式的机器人关节的缺点是需要精度要求高的过渡轴,提高了成本。此外,谐波减速机的交叉滚子轴承距离输出法兰较远,降低了谐波减速机的弯曲刚度。
第三种机器人关节结构由电机、杯型谐波减速机、输入法兰和输出法兰组成。电机安装在输入法兰上,输入法兰与杯型谐波减速机刚轮侧的法兰连接,电机轴与谐波减速机的波发生器直接连接,输出法兰与谐波减速机的柔轮侧连接。这种形式的机器人关节缺点在于:现有的杯型谐波减速机的法兰靠近刚轮侧,导致与输入法兰连接后整个关节的轴向尺寸较大。如果输入法兰与机架是一体式的,则装配时只能一件一件地安装,比较繁琐。而如果输入法兰与机架是分离式的,则由于装配关系,输入法兰的径向尺寸必须足够大。
发明内容
本申请提供一种结构紧凑、较低成本且方便安装的机器人关节机构。
本申请提供一种机器人关节结构,包括电机、谐波减速机、输入法兰和输出法兰,所述输入法兰为固定端,所述输出法兰为活动端,所述谐波减速机包括波发生器、刚轮和柔轮;所述电机与所述谐波减速机固定连接成为一装配体;所述机器人关节结构还包括减速机法兰,用于将所述装配体安装于所述输入法兰上,其中所述减速机法兰设于所述谐波减速机的输出端侧。
可选的,所述机器人关节结构还包括电机过渡法兰,所述电机安装在所述电机过渡法兰上且所述电机的电机轴与所述谐波减速机的波发生器直接连接,所述电机过渡法兰与所述谐波减速机的刚轮固定连接,使得所述电机、所述电机过渡法兰和所述谐波减速机连接成为所述装配体。
可选的,所述谐波减速机还包括交叉滚动轴承,所述交叉滚动轴承的轴承外圈与所述刚轮连接,同时与所述减速机法兰固定连接,所述交叉滚动轴承的轴承内圈的第一端面与所述输出法兰固定连接,所述交叉滚动轴承的所述轴承内圈的第二端面与所述柔轮连接,所述第二端面和所述第一端面相对设置。
可选的,所述柔轮为杯状柔轮,所述交叉滚动轴承的轴承内圈的所述第二端面与所述柔轮的杯底连接。
可选的,所述电机通过紧固件安装在所述电机过渡法兰上。
本申请还提供一种机器人关节结构的组装方法,包括以下步骤:
将电机与谐波减速机固定连接成为一装配体,其中所述谐波减速机包括波发生器、刚轮和柔轮;
在所述谐波减速机的输出端侧设置减速机法兰,通过所述减速机法兰将所述装配体安装于输入法兰上,所述输入法兰为固定端,所述输出法兰为活动端;
将所述谐波减速机的柔轮与所述输出法兰连接。
可选的,所述将电机与谐波减速机固定连接成为一装配体的步骤包括:
将所述电机安装在电机过渡法兰上;
将所述电机的电机轴与所述谐波减速机的波发生器直接连接;
将所述电机过渡法兰与所述谐波减速机的刚轮固定连接。
可选的,所述谐波减速机还包括交叉滚动轴承,所述交叉滚动轴承的轴承外圈与所述刚轮连接,所述通过所述减速机法兰将所述装配体安装于输入法兰上的步骤包括:
将所交叉滚动轴承的轴承外圈与所述减速机法兰固定连接;
通过紧固件将所述减速机法兰安装在所述输入法兰上。
可选的,所述将所述谐波减速机的柔轮与输出法兰连接的步骤包括:
将所述交叉滚动轴承的轴承内圈的第二端面与所述柔轮连接;
将所述交叉滚动轴承的轴承内圈的第一端面与所述输出法兰连接,其中所述第二端面与所述第一端面相对设置。
可选的,通过紧固件将所述电机安装在所述电机过渡法兰上。
根据本申请实施例提供的技术方案,机器人关节结构具有以下优点:首先,通过将电机和谐波减速机形成装配体,方便安装;其次,通过将减速机法兰设置在减速机输出端侧,整个机器人关节的轴向尺寸较小,结构紧凑,此外也无需采用精度要求较高的过渡件;再次,谐波减速机的交叉滚动轴承距离输出法兰较近,弯曲刚度较好。最后,谐波减速机法兰靠近输出法兰,更方便设计密封结构。
附图说明
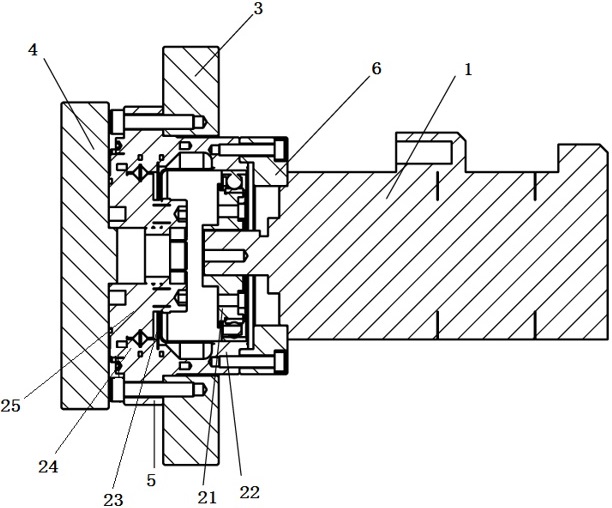
图1所示为本申请的机器人关节的一个实施例的结构图。
具体实施方式
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本申请相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本申请的一些方面相一致的装置的例子。
在本申请使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本申请。除非另作定义,本申请使用的技术术语或者科学术语应当为本申请所属领域内具有一般技能的人士所理解的通常意义。本申请说明书以及权利要求书中使用的“包括”或者“包含”等类似词语意指出现在“包括”或者“包含”前面的元件或者物件涵盖出现在“包括”或者“包含”后面列举的元件或者物件及其等同,并不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而且可以包括电性的连接,不管是直接的还是间接的;也非限定于多个独立部件之间的连接,除非特别说明,还可以包括多个部件采用一体成型的方式相连接。
图1所示为本申请机器人关节结构的结构示意图。如附图1所示,机器人关节结构包括电机1、谐波减速机、输入法兰3、输出法兰4和减速机法兰5。其中,输入法兰3为固定端,例如是机器人关节结构所连接的两节机械臂中相对固定的机械臂的机架或与机架一体成型,或者是相对固定的机械臂的机架的转接部件。当输入法兰与机架一体成型时,可以进一步减小整个机器人关节的径向尺寸。输出法兰4为活动端,例如是机器人关节结构所连接的两节机械臂中相对运动的机械臂的机架或与机架一体成型,或者是相对运动的机械臂的机架的转接部件。
谐波减速机包括波发生器21、刚轮22和柔轮23。电机1与谐波减速机固定连接成为一个装配体,减速机法兰5用于将电机1和谐波减速机组成的装配体安装于输入法兰3上。本申请中减速机法兰5设于谐波减速机的输出端侧,具体地是位于输出法兰和输入法兰之间。相较于现有技术中将减速机法兰设置在靠近减速机输入端侧的做法,使得整个机器人关节结构的轴向尺寸缩短。
请参照图1,电机1通过电机过渡法兰6于谐波减速机固定连接。具体的,电机1[上海捷勃特机器人有3] 可通过螺钉等紧固件安装在电机过渡法兰6上,电机过渡法兰6例如可通过螺钉等紧固件与谐波减速机的刚轮22固定连接。此外,电机1的电机轴和谐波减速机的波发生器1直接连接。由此,电机1、电机过渡法兰6和谐波减速机连接成为装配体,装配体可以作为一个整体与输入法兰3连接。
本实施例中,谐波减速机还包括交叉滚动轴承,交叉滚动轴承位于谐波减速机的输出端,包括轴承外圈24和轴承内圈25。交叉滚动轴承的轴承外圈24与刚轮22连接,优选地轴承外圈24可以和刚轮22为一体设计。减速机法兰23套设于交叉滚动轴承外部且轴承外圈24(刚轮22)固定连接,同时减速机法兰23通过例如螺钉等紧固件与输入法兰3连接,由此可以将装配体安装至输入法兰3上。交叉滚动轴承的轴承内圈25具有相对的两个端面,其中第一端面与输出法兰4固定连接,而第二端面则与柔轮23连接。本实施例中,柔轮23为杯状柔轮,交叉滚动轴承的轴承内圈25的第二端面与杯状柔轮的杯底连接,由此实现输出法兰4与柔轮23的连接。由以上可知,通过减速机法兰5将电机和谐波减速机的装配体安装至固定端输入法兰,再通过交叉滚动轴承将谐波减速机的柔轮连接至活动端输出法兰,从而可使得输出法兰相对于输入法兰运动。进一步地,由于交叉滚动轴承贴近输出法兰,弯曲刚度较好。
根据本申请的另一方面,还提供了一种机器人关节结构的组装方法,包括如下步骤。
首先,将电机1与谐波减速机固定连接成为一装配体。
本步骤中,先将电机1用诸如螺钉的紧固件锁在电机过渡法兰6上,接着将电机1的电机轴与谐波减速机的波发生器21直接连接,然后将电机过渡法兰6通过诸如螺钉等紧固件固定在谐波减速机的刚轮22上。至此,电机1、电机过渡法兰6和谐波减速机3组成一个装配体,这对整个机器人关节的装配来说是非常方便的,并且对于过渡法兰的工艺难度也不高。
在装配体组装完成后,在谐波减速机的输出端侧设置减速机法兰5,通过减速机法兰5将装配体安装在输入法兰3上;将谐波减速机的柔轮23与输出法兰4连接。
本步骤中,可利用交叉滚动轴承实现减速机法兰5和谐波减速机的连接。具体的,谐波减速机包括交叉滚动轴承,交叉滚动轴承的轴承外圈和刚轮连接。优选的,轴承外圈和刚轮是一体设计的。减速机法兰5和交叉滚动轴承的轴承外圈固定连接,也就和谐波减速机的刚轮固定连接。之后,通过紧固件将减速机法兰5安装[上海捷勃特机器人有4] 在输入法兰3上,也就将装配体安装在了输入法兰3上。另一方面,将交叉滚动轴承的轴承内圈25的一个端面与柔轮23连接,具体的是和杯状柔轮的杯底连接,之后将交叉滚动轴承的轴承内圈25的另一个端面和输出法兰4连接,也就实现了谐波减速机的柔轮23与输出法兰4的连接,最终完成了机器人关节结构的组装。
综上所述,本申请通过将减速机法兰靠近谐波减速机输出端设置,充分利用了输出法兰和输入法兰之间的空间,使得整个机器人关节结构的轴向尺寸缩小,且减速机法兰靠近输出法兰更方便设计密封结构。因此,相比现有常见的机器人关节结构,本申请具备结构紧凑、较低成本且方便安装的优点,具有较大的实用价值。
以上所述仅为本申请的较佳实施例而已,并不用以限制本申请,凡在本申请的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本申请保护的范围之内。
- 机器人关节结构及其组装方法
- 机器人关节结构及机器人关节结构的装配方法