一种基于机器识别的水上智能净化机器人
文献发布时间:2023-06-19 11:24:21
技术领域
本发明属于垃圾处理技术领域,具体为一种基于机器识别的水上智能净化机器人。
背景技术
垃圾是人类日常生活和生产中产生的固体废弃物,由于排出量大,成分复杂多样,且具有污染性、资源性和社会性,需要无害化、资源化、减量化和社会化处理,如不能妥善处理,就会污染环境,影响环境卫生,浪费资源,破坏生产生活安全,破坏社会和谐,垃圾处理就是要把垃圾迅速清除,并进行无害化处理,最后加以合理地利用,当今广泛应用的垃圾处理方法是卫生填埋、高温堆肥和焚烧,垃圾处理的目的是无害化、资源化和减量化。
目前对于自然水体的清洁,多数需要工人开船进行捞取和收集,对于大型的垃圾,整体的收集效率较好,但是小型的垃圾,往往无法保证及时收集,当对水源进行检测时,往往需要单独进行取样,导致了水体检测便捷性和精确度较差。
发明内容
本发明的目的在于:通过清洁组件、急救组件与行驶组件,可以实现对同时实现垃圾收集和水质净化,在收集垃圾的同时,通过检测组件对水源中心的水体进行检测,保证了对水体的检测精度,提高了水体检测的便捷性,搭载无人机,实现水上机器人自助救援,通过机械手、旋转架、收集架和漏网,可以提高了大型垃圾的收集和落水人员的救援效率,提高救援的效率。
本发明采用的技术方案如下:一种基于机器识别的水上智能净化机器人,包括清洁组件与急救组件,所述清洁组件包括加强架、工型钢、收集架、旋转架、漏网与驱动装置,所述收集架固定设置于旋转架的外壁边缘处,所述漏网固定设置于收集架的外壁边缘处,所述收集架的横截面呈L状,所述驱动装置通过转轴转动设置于旋转架的外壁一侧中心处,所述工型钢共设置有两个,两个所述工型钢的一端固定设置于加强架的外壁边缘两侧处,以及,
所述急救组件包括磁力槽、无人机组件、机械手、摄像头、行驶组件与检测组件,所述无人机组件设置于磁力槽的内壁处,所述机械手安装设置于加强架的外壁边缘处,两个所述摄像头分别固定设置于工型钢的一端外壁顶部处。
进一步的,所述行驶组件包括浮力筒、稳定块、推进器与减阻面,所述浮力筒共设置有两个,两个所述浮力筒的外壁顶部通过螺栓安装设置于加强架的外壁底部处,所述稳定块共设置有两个,两个所述稳定块分别固定设置于浮力筒的外壁底部处,每个所述稳定块的横截面呈类三角状,所述减阻面开设于稳定块地外壁边缘处,所述推进器的外壁顶部通过螺栓安装设置于加强架的外壁底部处。
进一步的,所述检测组件包括PH加测装置、浑浊度装置与含氧量装置。
进一步的,所述工型钢的一端外壁中心处通过转轴转动设置于旋转架的外壁一侧中心处。
进一步的,所述加强架的外壁顶部一侧固定设置有电力箱,且电力箱的内壁底部嵌设有蓄电池。
进一步的,所述加强架的外壁顶部固定设置有收集箱,且收集箱的内壁套设有垃圾收集袋。
进一步的,所述工型钢的内壁两侧均滑动嵌设有限制块,且限制块地外壁一侧中心处固定设置有安装管。
进一步的,所述安装管的外壁滑动套设有垃圾收集网。
进一步的,所述浮力筒的横截面呈半圆状。
一种基于机器识别的水上智能净化机器人,使用了根据权利要求1-9中任意一项所述的一种基于机器识别的水上智能净化机器人的使用方法,包括:
步骤一、开机寻找垃圾、随后通过检测组件对设定要素进行检测,水质较差时,启动净化装置,对水源进行净化。
步骤二、工作一段时间后,进入自检循环,判定电量,不足时直接返回岸边,电量充足时,检测是否失控。
步骤三、确定失控后,释放无人机,通过人工干预返回岸边,没有失控则通过摄像头对工作环境进行检测,检测大型垃圾或者落水人员。
步骤四、返回岸边后,对电源和推进装置进行检修和维护。
综上所述,由于采用了上述技术方案,本发明的有益效果是:
本发明中,通过清洁组件、急救组件与行驶组件,可以实现对同时实现垃圾收集和水质净化,在收集垃圾的同时,通过检测组件对水源中心的水体进行检测,保证了对水体的检测精度,提高了水体检测的便捷性,搭载无人机,实现水上机器人自助救援,通过机械手、旋转架、收集架和漏网,可以提高了大型垃圾的收集和落水人员的救援效率,提高救援的效率。
附图说明
图1为本发明的使用方法示意图;
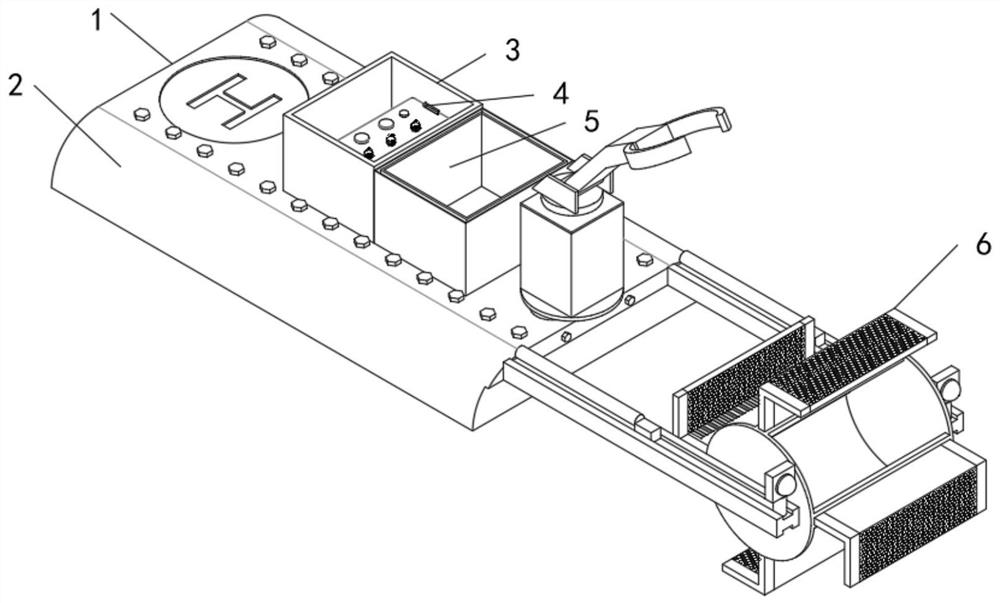
图2为本发明的立体图;
图3为本发明旋转架的立体图;
图4为本发明磁力槽的立体图;
图5为本发明的侧视图;
图6为本发明的俯视图;
图7为本发明推进器的侧视图;
图8为本发明漏网的侧视图;
图9为本发明机械手的侧视图;
图10为本发明的仰视图。
图中标记:1、加强架;2、浮力筒;3、电力箱;4、蓄电池;5、收集箱;6、收集架;7、机械手;8、旋转架;9、漏网;10、限制块;11、安装管;12、磁力槽;13、工型钢;14、减阻面;15、摄像头;16、推进器;17、稳定块。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
实施例一,参照图1到图10:一种基于机器识别的水上智能净化机器人,包括清洁组件与急救组件,清洁组件包括加强架1、工型钢13、收集架6、旋转架8、漏网9与驱动装置,收集架6固定设置于旋转架8的外壁边缘处,漏网9固定设置于收集架6的外壁边缘处,收集架6的横截面呈L状,驱动装置通过转轴转动设置于旋转架8的外壁一侧中心处,工型钢13共设置有两个,两个工型钢13的一端固定设置于加强架1的外壁边缘两侧处,以及,急救组件包括磁力槽12、无人机组件、机械手7、摄像头15、行驶组件与检测组件,无人机组件设置于磁力槽12的内壁处,机械手7安装设置于加强架1的外壁边缘处,两个摄像头15分别固定设置于工型钢13的一端外壁顶部处,通过加强架1,可以保证浮力筒2的稳定,不会因为捞取垃圾或者救援,导致发生倾覆的问题,通过收集架6、旋转架8和漏网9,可以实现高效的水面垃圾捞取和集中,提高了垃圾的收集效率,通过工型钢13,可以提高捞取垃圾的稳定性,避免产生结构疲劳,通过机械手7,可以实现高效的大型垃圾捞取,或者协助落水者的救助,通过摄像头15,可以实现对工作环境的情况进行采集,协助使用者进行实际情况的判定。
实施例二,参照图1到图10:行驶组件包括浮力筒2、稳定块17、推进器16与减阻面14,浮力筒2共设置有两个,两个浮力筒2的外壁顶部通过螺栓安装设置于加强架1的外壁底部处,稳定块17共设置有两个,两个稳定块17分别固定设置于浮力筒2的外壁底部处,每个稳定块17的横截面呈类三角状,减阻面14开设于稳定块17的外壁边缘处,推进器16的外壁顶部通过螺栓安装设置于加强架1的外壁底部处,检测组件包括PH加测装置、浑浊度装置与含氧量装置,工型钢13的一端外壁中心处通过转轴转动设置于旋转架8的外壁一侧中心处,加强架1的外壁顶部一侧固定设置有电力箱3,且电力箱3的内壁底部嵌设有蓄电池4,加强架1的外壁顶部固定设置有收集箱5,且收集箱5的内壁套设有垃圾收集袋,工型钢13的内壁两侧均滑动嵌设有限制块10,且限制块10的外壁一侧中心处固定设置有安装管11,安装管11的外壁滑动套设有垃圾收集网,浮力筒2的横截面呈半圆状。通过推进器16,可以实现高效的行驶驱动,保证机器人的行动便捷性,通过稳定块17,可以降低水中的行驶阻力,通过减阻面14,可以进一步降低行驶阻力,通过限制块10和安装管11,可以将垃圾收集网进行安装固定,保证可以储存大量的水中垃圾。
实施例三,参照图1到图10:一种基于机器识别的水上智能净化机器人,使用了根据权利要求1-9中任意一项的一种基于机器识别的水上智能净化机器人的使用方法,包括:步骤一、开机寻找垃圾、随后通过检测组件对设定要素进行检测,水质较差时,启动净化装置,对水源进行净化,步骤二、工作一段时间后,进入自检循环,判定电量,不足时直接返回岸边,电量充足时,检测是否失控,步骤三、确定失控后,释放无人机,通过人工干预返回岸边,没有失控则通过摄像头15对工作环境进行检测,检测大型垃圾或者落水人员,步骤四、返回岸边后,对电源和推进装置进行检修和维护。
使用时,开机寻找垃圾、通过浮力筒2和加强架1,对设备进行安装,随后将推进器16启动,带动浮力筒2和加强架1开设运转,通过驱动装置,带动旋转架8旋转,使得收集架6和漏网9实现高效的水面垃圾收集,通过收集箱5和安装管11上的垃圾收集网进行储存,随后通过检测组件对设定要素进行检测,水质较差时,启动净化装置,对水源进行净化,工作一段时间后,进入自检循环,判定电量,不足时直接返回岸边,电量充足时,检测是否失控,确定失控后,释放无人机,通过人工干预返回岸边,没有失控则通过摄像头15对工作环境进行检测,检测大型垃圾或者落水人员,通过机械手7对大型垃圾和落水人员进行协助,返回岸边后,对蓄电池4和推进器16进行检修和维护,该机器人下水后,用遥控器开机,机器人自行识别垃圾、收集垃圾,并以一定频率与遥控器互通信号,确保机器人受控,一旦信号错误,表明机器人不再受控,立即释放无人机,岸边工作人员使用遥控器收回无人机,正常情况下,机器人在垃圾收满后返回岸边,当机器人发现较大体积垃圾,无法收集时,或者有人员落水时,立即驱动机械手7,对目标进行抓取,并释放无人机,岸边工作人员使用遥控器收回无人机,在收集过程中,实时检测水质,对水质较差水域,投放无污染,无害化学净化颗粒物进行水质净化。
以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种基于机器识别的水上智能净化机器人
- 一种基于机器视觉识别的矿用智能巡检机器人