一种蛇形机器人
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及仿生机器人领域,具体而言,涉及一种蛇形机器人。
背景技术
蛇形机器人的灵感来自生物蛇,生物蛇具有良好的机动性能,可以在各种复杂的类型的地形上移动;蛇形机器人从形状和运动形式上仿照生物蛇设计,具有较高的自由度和灵活多样的运动形式,能在特定的场合发挥自己独特的优势,如不适合人工作业场合的探测及搜救工作,此外,在军事方面,蛇形机器人具有结构紧凑、易于伪装、隐秘性高等特点,通过自身携带的图像传输设备,以及通过地图构建的功能,完成侦查巡逻的任务,未来蛇形机器人甚至可以携带弹药,完成攻击以及爆破等任务;蛇形机器人尺寸可以在较大范围内变化,大尺寸蛇形机器人末端携带工具,用于工业生产,微小型蛇形机器人可以用于医疗行业,开展手术等。
诸如北京理工大学及浙江工业大学等近年来设计了一些关节基于平行连接或正交连接或万向节连接的蛇形机器人,为了实现仿生蛇的运动复杂性和灵活性,在球型万向节机构的基础上,采用十字型万向节的连接方式,这种设计结构相对简单、便于控制,同时具有很好的空间灵活性的关节模块;但是,现有的蛇形机器人大多都采用平行连接和正交连接,而这些连接方式都有本身的缺陷,如平行连接的蛇形机器人各个模块间的转动副轴线相互平行,因而只能进行二维运动;又如申请号为202010853162.5的中国专利申请公开了一种类蛇形爬动的机器人,其蛇身的相邻关节之间通过转向机构连接,转向机构包括了十字转向接头以及驱动十字转向接头发生转向的丝杠副,使得蛇身的运动相对地较为灵活;然而,其采用的正交连接,在任意相邻的两组关节中,十字转向接头上相对的第一端和第二端连接在前一组关节的尾部,且十字转向接头上相对的第三端和第四端连接在后一节关节的头部,前一组关节上设置一组丝杠副驱动十字转向接头绕其第三端到第四端所在的轴线在水平面内摆动,后一组关节上的丝杠副驱动十字转向接头绕其第一端到第二端所在的轴线在竖直面内摆动,其仅具有两个自由度,相邻的两组关节之间的转向范围仅限于在水平面和竖直面内的摆动,制约着关节的运动范围和动作丰富程度。
发明内容
本发明的目的在于克服背景技术的缺点,提供一种蛇形机器人。
本发明的实施例通过以下技术方案实现:
一种蛇形机器人,包括若干关节,每相邻的两组关节之间均设有转向机构,所述转向机构包括球销座组件,球销座组件的轴向两端各铰接有一组球销杆,每组球销杆各与同侧的一组关节连接;
所述相邻的两组关节中各设有两组朝向所述球销座组件的连杆,每组连杆均连接有驱动机构用以驱动连杆伸缩移动;
所述球销座组件的侧壁上还呈放射状布置有四组端头,四组端头与四组所述球销杆一一对应地活动连接,且在所述四组端头中,相邻的两组端头与同一组关节内的两组连杆分别连接。
进一步地,所述驱动机构包括设于关节内的丝杠副,其中,所述丝杠副的丝杆平行于所述关节的轴向布置,所述丝杠副的滑块与所述连杆相连,以通过滑块在丝杆上的移动带动所述连杆的伸缩移动。
进一步地,所述连杆的第一端铰接于所述端头上,所述连杆的第二端与所述滑块铰接。
进一步地,在垂直于所述球销座组件轴向方向的投影面上,所述四组端头中,任意相邻的两组端头之间的夹角均为90°。
进一步地,所述四组端头中,以任意相邻的两组端头为一组端头组件,余下两组相邻的端头为第二组端头组件,两组所述端头组件分别设于所述球销座组件轴向方向上的中点两侧;
位于所述中点一侧的端头组件内的两组端头与同侧关节内的两组连杆一一对应地连接。
进一步地,每组关节上设置有若干滚轮。
进一步地,所述关节呈圆筒状,关节的外壁上可转动地套设有至少两组圆环;所述至少两组圆环沿关节的轴向排列,关节上设有阻挡机构用于阻止每组圆环沿关节的轴向移动;每组圆环的外环面上均可转动地设置有若干所述滚轮。
进一步地,所述圆环的内壁上还环绕设置有若干转动件,每组转动件的回转轴线均平行于所述圆环的轴线。
进一步地,所述关节包括管筒,所述驱动机构设置于所述管筒内;
所述管筒外壁上凸出设置有两组第一限位环,所述管筒两端还各螺纹连接有一组挡圈,每组挡圈上凸出设置有第二限位环;所述圆环套设于第一限位环和同侧的第二限位环之间的管筒外壁上;所述阻挡机构包括所述第一限位环和第二限位环。
进一步地,所述圆环外缘上间隔均匀地设置有若干固定组件,相邻的两组固定组件之间设置有一组所述滚轮,所述滚轮的两端分别各与一组固定组件转动连接。
本发明实施例的技术方案至少具有如下优点和有益效果:
本发明的蛇形机器人中,每个关节都能实现俯仰和偏航运动,且推进器采用工业上的丝杆推进,具备了稳定、高速以及强力的推进效果,从而实现在复杂环境下也能进行三维运动的效果。
附图说明
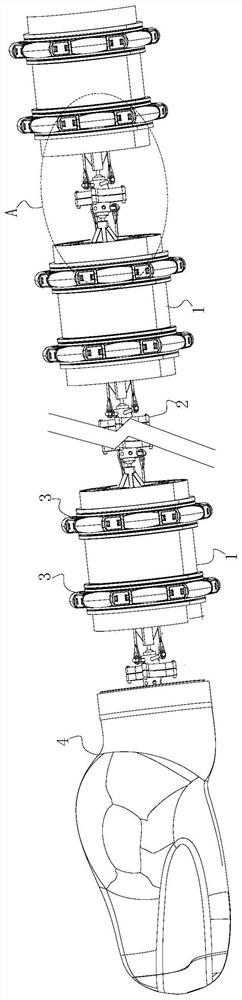
图1为本发明的蛇形机器人的结构示意图;
图2为图1的A部分放大图;
图3为本发明的蛇形机器人的转向机构结构示意图;
图4为本发明的蛇形机器人的关节结构示意图1;
图5为本发明的蛇形机器人的关节结构示意图2;
图6为本发明的蛇形机器人去掉管筒后的关节结构示意图;
图7为本发明的蛇形机器人的滚轮组件结构示意图;
图8为本发明的蛇形机器人的动作控制原理图;
图标:1-关节,10-管筒,100-滑块,101-连杆,102-导向杆,103-电机,104-丝杆,105-第一限位环,106-连接座,11-挡圈,110-第二限位环,2-转向机构,20-球销座组件,200-端头,21-球销杆,3-滚轮组件,30-圆环,300-转动件,31-固定组件,310-滚轮,4-蛇头。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参照图1至图7,一种蛇形机器人,包括若干关节1,每相邻的两组关节1之间均设有转向机构2,若干关节1之间通过转向组件2串联在一起,位于最前端的关节上连接有蛇头4。
所述转向机构2包括球销座组件20,具体地,所述球销座组件20包括两组球销座,两组球销座的底部相接,通过螺钉固定在一起,所述球销座组件20的轴向两端各铰接有一组球销杆21,每组球销杆21各与同侧的一组关节1连接,具体地,每组关节1的两端端部中央均设有连接座106,球销杆21的端部与连接座106相连。
参照图4,所述相邻的两组关节1中各设有两组朝向所述球销座组件 20的连杆101,每组连杆101均连接有驱动机构用以驱动连杆101伸缩移动,所述驱动机构包括设于关节1内的丝杠副,其中,所述丝杠副的丝杆 104平行于所述关节1的轴向布置,每组丝杆104连接有一组电机103,电机103设于所述关节1内,所述丝杠副内的滑块100与所述连杆101相连,通过滑块100在丝杆104上的移动带动所述连杆101的伸缩移动,此外,关节1内还平行于所述丝杆104长度方向设置有导向杆102,滑块100穿设于所述导向杆102上,使得滑块100的前后滑动更加平稳。
参照图2和图3,所述球销座组件20的侧壁上还呈放射状布置有四组端头200,四组端头200与四组所述球销杆21一一对应地活动连接,且在所述四组端头200中,且在四组所述端头200中,相邻的两组端头200与同一组关节1内的两组连杆101分别连接,余下相邻的两组端头200与另一组关节1内的两组连杆101分别连接。
在一些优选实施例中,每组连杆101的第一端铰接于所述端头200上,每组连杆101的第二端与所述滑块100铰接。
需要说明的是,基于上述结构,为将所述若干关节1之间串接在一起,每组关节1的两端各设有两组所述连杆101,每组连杆101各连接有一组所述驱动机构,因此,每组关节1内具有四组所述丝杠副和四组电机103。
在一些优选实施例中,在垂直于所述球销座组件20轴向方向的投影面上,所述四组端头200中,任意相邻的两组端头200之间的夹角均为90°,此外,参照图3,所述四组端头200中,以任意相邻的两组端头200为一组端头组件,余下两组相邻的端头200为第二组端头组件,两组所述端头组件分别设于所述球销座组件20轴向方向上的中点两侧;
参照图2,位于所述球销座组件20轴向方向上的中点第一侧的端头组件内的两组端头200与第一侧的关节1内的两组连杆101一一对应地连接,位于述球销座组件20轴向方向上的中点第二侧的端头组件内的两组端头 200与第二侧的关节1内的两组连杆101一一对应地连接。
此外,所述每组关节1上设置有若干滚轮310。
具体地,所述关节1呈圆筒状,关节1的外壁上可转动地套设有至少两组圆环30,所述两组至少两组圆环30沿关节1的轴向排列,即圆环30 的数量可根据实际需求设置,本实施例中为两组,关节1上设有阻挡机构用于阻止每组圆环30沿关节1的轴向移动,每组圆环30的外环面上均可转动地设置有若干所述滚轮310,圆环30可以关节1的为轴旋转,圆环30上设置若干辊轮310使得管节1的动作更加灵活。
具体地,参照图6,所述圆环30外缘上间隔均匀地设置有若干固定组件31,相邻的两组固定组件31之间设置有一组所述滚轮310,所述滚轮310 的两端分别各与一组所述固定组件31转动连接,此设计不仅减少了蛇形机器人的行进阻力,提高其运动阻力,两滚轮310之间的平直面也增大了蛇身的支撑面积,保证了蛇形机器人能稳定停靠与行进。
在一些优选实施例中,为进一步提高圆环30的灵活程度,减小与关节 1外壁之间的摩擦,所述圆环30的内壁上还环绕设置有若干转动件300,每组转动件300的回转轴线均平行于所述圆环30的轴线。
在一些优选实施例中,所述关节1包括管筒10,所述驱动机构设置于所述管筒10内,需要说明的是:在本发明中,驱动机构包括但不限于齿轮齿条驱动机构、线性模组以及前述的丝杠副中的任意一组。
所述管筒10外壁上凸出设置有两组第一限位环105,所述管筒10两端还各螺纹连接有一组挡圈11,具体地,通过挡圈11上的内螺纹丝合于所管筒10的端部外壁上;每组挡圈11上凸出设置有第二限位环110;所述圆环 30套设于第一限位环105和同侧的第二限位环110之间的管筒10外壁上;所述阻挡机构包括所述第一限位环105和第二限位环110,该结构使得所述关节1可方便地拆卸和组装。
此外,本发明提供的蛇形机器人,此机器人为一款基于机器视觉、强化学习以及蛇形曲线的蛇形智能仿生机器人,主要内容分为两部分,第一部分为如上所述的设计简洁、高效、抗压能力强的蛇形实体机械结构;二则是结合机器视觉、强化学习设计一种鲁棒性良好的控制程序。
通过更加智能化的控制思想、更为优化的机械结构,控制思想结合了强化学习最优控制、机器视觉的精确目标检测以及路径规划的智能导航等优点,使其能在复杂环境中按最佳路线进行平滑、稳定的行进,而机械结构创新体现在所述转向机构2的设计,每个关节1都能实现俯仰和偏航运动,且动力机构采用工业上的丝杆推进,具备了稳定、高速以及强力的推进效果。
参照图8,在蛇形机器人的控制方面,所述蛇头4及每组管节1内均搭载有控制器和传感器,如控制器可采用树莓派,即每组关节1内均设置有前述控制模块(以下统称模块),每组关节1内置有陀螺仪,用以检测蛇形姿态,返回行动参数,同时稳定前行动作。
将蛇形运动控制曲线与正弦波函数高度拟合,所编写Python程序应用于所述树莓派,蛇头4及管节1的树莓派将动作转化为PWM信号,再通过电机驱动模块控制电机103,进而控制机器人完成空间上的运动效果。
具体地,本实施例中,蛇形机器人由8个模块组成,每个模块含有一个电机驱动模块和四个电机103,分别为俯仰、偏航电机组。第一模块为蛇头4内的主机,其余关节1内的模块为从机,主从机通过Web_Socket通信,蛇头4的头部装载摄像头,摄像头传入图像进入主机进行YOLO-V5目标检测以获取环境信息,而后主机基于采集的信息经过强化学习的DDPG算法运算得到状态与动作,进而得到一个最佳路径的整个动作序列,然后主机按照时间序列通过Web_Socket通信将每个模块的相应动作发给从机,最后每个模块的树莓派将动作转化为PWM信号,使得模块内的电机驱动模块控制每个关节1两端的两个电机组,达到三维空间内动作的效果。
树莓派发出PWM信号,电机驱动模块控制两个电机组,两个电机组输出的运动部分经由滑块100,进而带动连杆101,从而推动转向机构2,进而实现关节转动。
蛇身转动过程中的静摩擦产生一个轴向力,其分力实现蛇身的蜿蜒前行运动,滚轮通过滚轮套固定在关节前后,减少前进的摩擦力。
参照图8,具体地,每个模块含有一个电机驱动模块和四个电机103,分别为俯仰、偏航电机组,模块内的电机驱动模块控制两个电机组,达到三维空间内动作的效果,在未通电时,滑块100位于平衡位置,转向机构2 不发生偏移,当单个电机103被通与正向或反向电压时,电机103推动与之相连的滑块100进行正向或反向行进,滑块100带动连杆101的前伸或后退,进而拉动转向机构2进行一维方向上的旋转,相邻的关节1之间通过转向机构2连接,可实现最大程度的蛇身偏转。
蛇形机器人依靠身体的摆动摩擦地面而获得前进的动力,滚轮310作为运动辅助机构,可以产生较大的法向摩擦力以防止打滑现象的产生,同时使得运动的阻力逐渐变小,提高蛇形机器人的运动效率,滚轮310的设计使机器人具有多的接地面积,因而机器人具有更加稳定的三维运动能力。
本发明所涉及的蛇行仿生机器人的电气系统组成包括直流稳压电源、 78M05降压模块、L298减速电机控制模块、减速电机以及其他元器件,由于机器人所使用的电子器件较多,本发明对控制电路进行了优化设计。
机器人的的树莓派控制器的具体型号为rasberry_zero_wh,用其同时控制关节1和蛇头4的摆动,通过调节树莓派输出的PWM波占空比与延迟时间,从而控制电机103不同的运行时间与转速。再通过协调各电机103 的转速和动作时序,使机器人完成指定动作,从而实现类似蛇爬行的运动动作,蛇爬行的动作是一种近似于正弦波波动的节律型运动,在陆地上运动时,通过与蛇形机器人地面接触的点与地面的摩擦力推动机器人运动。通过控制电,103的转速和运行时间可以控制机器人前进或者转弯的动作。
在蛇头4安装传感器,并于蛇身关机1安装陀螺仪,结合强化学习,返回行进中各参数。测试中发现,机器人各关,1间高度配合,运动稳定、高速,搭载陀螺仪,使得其受环境干扰较小,动作反应快。
本发明的蛇形机器人根据蛇的运动原理制作的一种特殊的仿生机器人,其在复杂环境下具有如下优势:
(1)、在运动过程中身体始终保持贴伏于地面,低重心的行走方式使其运动具有稳定性;
(2)、依靠身体的摆动通过摩擦而获得前进动力的方式使其具有一定的自动避障能力;
(3)、颀长的身体和多种步态使其可以通过狭窄空间和部分沟壑,并具有杆状物体攀爬能力,在危险和复杂的环境中担任探查和操作的角色,具有重要的应用前景。
以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种变直径蛇形机器人模块及蛇形机器人
- 一种蛇形机器人关节及蛇形机器人