识别号码设定系统、识别号码设定方法及机器人系统
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及识别号码设定系统、识别号码设定方法以及机器人系统。
背景技术
近年来,在工厂中,由于人力成本的高涨和人力资源短缺,正在通过各种机器人及其机器人外围设备加速人手进行作业的自动化。例如专利文献1所记载的机器人由编码器、电动机等各种要素部件构成,它们被控制装置相互独立地控制。另外,在各种要素部件中,同种的要素部件与控制装置通过总线进行连接。
另外,在各要素部件中设定有单独的识别号码,能够与控制装置单独地进行通信。同种要素部件的初始识别号码是相同的,为了实现与控制装置的单独的通信,需要对各要素部件分配单独的识别号码。
在专利文献1中,将同种要素部件例如各编码器与外部装置连接,外部装置发送固有的识别信息的信号,当编码器装置接收到该信号时,编码器装置改写自身的识别信息。由此,对各编码器装置分配单独的识别信息。
现有技术文献
专利文献
专利文献1:日本特开2004-318439号公报。
然而,为了对通过总线进行连接的要素部件设定互不相同的识别号码,如专利文献1所记载的那样,需要将外部装置与要素部件连接而单独地设定识别号码。这样的方法花费时间并且很麻烦。
发明内容
本适用例的识别号码设定系统的特征在于,具备:
第一要素部件,所述第一要素部件具有第一存储部,所述第一要素部件与从总线型通信配线的主线分支出的第一分支通信线连接且与电源连接;
第二要素部件,所述第二要素部件具有第二存储部,所述第二要素部件与从所述主线分支出的第二分支通信线连接,并以能够切换通电和断电的方式与所述电源连接;以及
控制装置,所述控制装置与所述主线连接,并与所述第一要素部件及所述第二要素部件进行通信,
在向所述第一要素部件供给电力且未向所述第二要素部件供给电力的第一状态下,所述控制装置向所述第一存储部写入第一识别号码,
在所述第一识别号码写入后且在向所述第二要素部件供给电力的第二状态下,所述控制装置向所述第二存储部写入与所述第一识别号码不同的第二识别号码。
本适用例的识别号码设定系统的特征在于,具备:
第一要素部件,所述第一要素部件具有第一存储部,所述第一要素部件与从总线型通信配线的主线分支出的第一分支通信线连接且与电源连接;
第二要素部件,所述第二要素部件具有第二存储部,所述第二要素部件与从所述主线分支出的第二分支通信线连接,并以能够切换通电和断电的方式与所述电源连接;以及
控制装置,所述控制装置与所述主线连接,并能够取得第一通信状态和第二通信状态,所述第一通信状态能够与所述第一要素部件进行通信且不能与所述第二要素部件进行通信,所述第二通信状态能够与所述第二要素部件进行通信,
在所述第一通信状态下,所述控制装置向所述第一存储部写入第一识别号码,
在所述第一识别号码写入后,所述控制装置设为所述第二通信状态,并向所述第二存储部写入与所述第一识别号码不同的第二识别号码。
本适用例的识别号码设定方法的特征在于,其是一种对第一要素部件和第二要素部件设定互不相同的识别号码的设定方法,其中,所述第一要素部件具有第一存储部,所述第一要素部件与从总线型通信配线的主线分支出的第一分支通信线连接,且与电源连接,所述第二要素部件具有第二存储部,所述第二要素部件与从所述主线分支出的第二分支通信线连接,并以能够切换通电和断电的方式与所述电源连接,
所述识别号码设定方法具有:
第一步骤,在向所述第一要素部件供给电力、且未向所述第二要素部件供给电力的第一状态下,向所述第一存储部写入第一识别号码;以及
第二步骤,在所述第一识别号码写入后,向所述第二要素部件供给电力而从所述第一状态设为第二状态,并向所述第二存储部写入与所述第一识别号码不同的第二识别号码。
本适用例的机器人系统的特征在于,具备:
机器人,所述机器人具有第一要素部件和第二要素部件,所述第一要素部件具有第一存储部,所述第一要素部件与从总线型通信配线的主线分支出的第一分支通信线连接且与电源连接,所述第二要素部件具有第二存储部,所述第二要素部件与从所述主线分支出的第二分支通信线连接,并以能够切换通电和断电的方式与所述电源连接;以及
控制装置,所述控制装置与所述主线连接,并与所述第一要素部件及所述第二要素部件进行通信,
在向所述第一要素部件供给电力且未向所述第二要素部件供给电力的第一状态下,所述控制装置向所述第一存储部写入第一识别号码,
在所述第一识别号码写入后且在向所述第二要素部件供给电力的第二状态下,所述控制装置向所述第二存储部写入与所述第一识别号码不同的第二识别号码。
附图说明
图1是具备本发明的第一实施方式的识别号码设定系统的机器人系统的概略构成图。
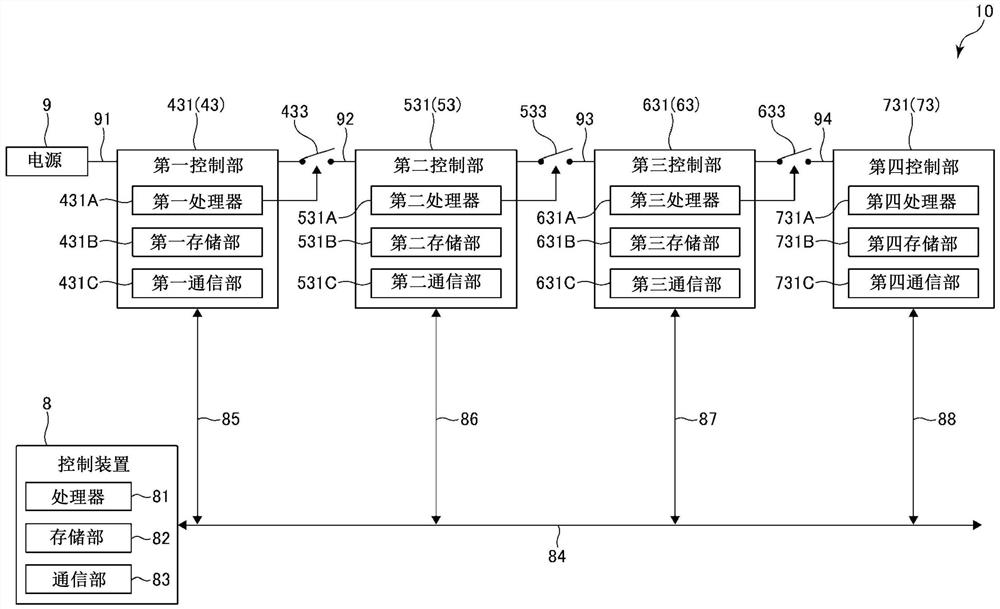
图2是图1所示的机器人系统的框图。
图3是示出在图1所示的机器人系统中控制装置与各编码器装置的连接状态的详细框图。
图4是示出在图1所示的机器人系统中控制装置与各编码器装置的连接状态的详细框图。
图5是示出在图1所示的机器人系统中控制装置与各编码器装置的连接状态的详细框图。
图6是示出在图1所示的机器人系统中控制装置与各编码器装置的连接状态的详细框图。
图7是用于说明图1所示的识别号码设定系统进行的控制动作的流程图。
图8是示出在具备本发明的第二实施方式的识别号码设定系统的机器人系统中控制装置与各编码器装置的连接状态的详细框图。
图9是示出在具备本发明的第三实施方式的识别号码设定系统的机器人系统中控制装置与各编码器装置的连接状态的详细框图。
图10是用于说明图9所示的识别号码设定系统所进行的控制动作的流程图。
符号说明
2、机器人;3、示教装置;4、驱动单元;5、驱动单元;6、u驱动单元;7、z驱动单元;8、控制装置;9、电源;10、识别号码设定系统;20、机械臂;21、基座;22、第一臂;23、第二臂;24、第三臂;25、末端执行器;26、力检测部;31、处理器;32、存储部;33、通信部;34、显示部;41、电动机;42、减速器;43、第一编码器装置;51、电动机;52、减速器;53、第二编码器装置;61、电动机;62、减速器;63、第三编码器装置;71、电动机;72、减速器;73、第四编码器装置;81、处理器;82、存储部;83、通信部;84、主线;85、第一分支通信线;86、第二分支通信线;87、第三分支通信线;88、第四分支通信线;91、第一电气配线;91A、第一电气配线;92、第二电气配线;92A、第二电气配线;93、第三电气配线;93A、第三电气配线;94、第四电气配线;94A、第四电气配线;100、机器人系统;220、壳体;230、壳体;241、轴;431、第一控制部;431A、第一处理器;431B、第一存储部;431C、第一通信部;432、第一检测部;433、开关;433A、开关;433B、开关;531、第二控制部;531A、第二处理器;531B、第二存储部;531C、第二通信部;532、第二检测部;533、开关;533A、开关;533B、开关;631、第三控制部;631A、第三处理器;631B、第三存储部;631C、第三通信部;632、第三检测部;633、开关;633A、开关;633B、开关;731、第四控制部;731A、第四处理器;731B、第四存储部;731C、第四通信部;732、第四检测部;733、开关;733A、开关;733B、开关;O1、第一轴;O2、第二轴;O3、第三轴;TCP、控制点。
具体实施方式
以下,基于附图所示的优选的实施方式,对本发明的识别号码设定系统、识别号码设定方法及机器人系统进行详细说明。
第一实施方式
图1是具备本发明的识别号码设定系统的机器人系统的概略构成图。
图2是图1所示的机器人系统的框图。图3~图6是示出在图1所示的机器人系统中控制装置与各编码器装置的连接状态的详细框图。图7是用于说明图1所示的识别号码设定系统所进行的控制动作的流程图。
另外,在图1中,为了便于说明,作为相互正交的3轴,图示了x轴、y轴以及z轴。另外,以下,将与x轴平行的方向也称为“x轴方向”,将与y轴平行的方向也称为“y轴方向”,将与z轴平行的方向也称为“z轴方向”。另外,将绕z轴的方向以及绕与z轴平行的轴的方向也称为“u方向”。
另外,以下,为了便于说明,将图1中的z轴的箭头的前端侧、即上侧也称为“上”或“上方”,将基端侧、即下侧也称为“下”或“下方”。另外,关于机械臂20,将图1中的基座21侧称为“基端”,将其相反侧、即末端执行器25侧称为“前端”。另外,将图1中的z轴方向、即上下方向设为“铅垂方向”,将x轴方向以及y轴方向设为“水平方向”。
图1以及图2所示的机器人系统100是在例如电子部件以及电子设备等的工件的保持、输送、组装以及检查等作业中使用的装置。机器人系统100具备:机器人2,其具有控制装置8;以及示教装置3,其对机器人2示教动作程序。
另外,机器人系统100具有本发明的识别号码设定系统10。识别号码设定系统10是对经由总线型通信配线分别与控制装置8连接的第一要素部件及第二要素部件分配单独的地址、即识别号码的系统。由此,控制装置8能够对第一要素部件及第二要素部件单独地进行通信。作为第一要素部件以及第二要素部件,适用通过总线型通信配线而与控制装置8连接的电子部件中的任意两个。关于这一点,将在后面详细描述。
首先,对机器人2进行说明。
对于图示的结构而言,机器人2是水平多关节机器人、即SCARA机器人。如图1所示,机器人2具有基座21、与基座21连接的机械臂20、末端执行器25、力检测部26以及控制这些各部的动作的控制装置8。
基座21是支承机械臂20的部分。在基座21内置有后述的控制装置8。另外,在基座21的任意部分设定有机器人坐标系的原点。此外,图1所示的x轴、y轴以及z轴是机器人坐标系的轴。
机械臂20具备第一臂22、第二臂23和作为作业头的第三臂24。
此外,机器人2不限于图示的结构,臂的数量可以是1个或2个,也可以是4个以上。
另外,机器人2具备:使第一臂22相对于基座21旋转的驱动单元4、使第二臂23相对于第一臂22旋转的驱动单元5、使第三臂24的轴241相对于第二臂23旋转的u驱动单元6、以及使轴241相对于第二臂23在z轴方向上移动的z驱动单元7。
如图1和图2所示,驱动单元4内置于第一臂22的壳体220内,具有产生驱动力的电动机41、对电动机41的驱动力进行减速的减速器42、以及对电动机41或减速器42的旋转轴的旋转角度进行检测的第一编码器装置43。
驱动单元5内置于第二臂23的壳体230,具有产生驱动力的电动机51、对电动机51的驱动力进行减速的减速器52、以及对电动机51或减速器52的旋转轴的旋转角度进行检测的第二编码器装置53。
u驱动单元6内置于第二臂23的壳体230,具有产生驱动力的电动机61、对电动机61的驱动力进行减速的减速器62、以及对电动机61或减速器62的旋转轴的旋转角度进行检测的第三编码器装置63。
z驱动单元7内置于第二臂23的壳体230,具有产生驱动力的电动机71、对电动机71的驱动力进行减速的减速器72、以及对电动机71或减速器72的旋转轴的旋转角度、即旋转量进行检测的第四编码器装置73。
作为电动机41、电动机51、电动机61以及电动机71,可以使用例如AC伺服电动机、DC伺服电动机等伺服电动机。电动机41、电动机51、电动机61及电动机71分别与对应的未图示的电动机驱动器连接,经由电动机驱动器而由控制装置8控制。
另外,作为减速器42、减速器52、减速器62以及减速器72,可以使用例如行星齿轮式的减速器、波动齿轮装置等。
基座21例如通过螺栓等经由力检测部26而固定于未图示的地面。在基座21的上端部连结有第一臂22。第一臂22能够相对于基座21绕沿着铅垂方向的第一轴O1旋转。当使第一臂22旋转的驱动单元4驱动时,第一臂22相对于基座21绕第一轴O1在水平面内旋转。另外,在该旋转时,能够通过第一编码器装置43来检测第一臂22相对于基座21的旋转量。
另外,在第一臂22的前端部连结有第二臂23。第二臂23能够相对于第一臂22绕沿着铅垂方向的第二轴O2旋转。第一轴O1的轴向与第二轴O2的轴向相同。即,第二轴O2与第一轴O1平行。当使第二臂23旋转的驱动单元5驱动时,第二臂23相对于第一臂22绕第二轴O2在水平面内旋转。在该旋转时,能够通过第二编码器装置53来检测第二臂23相对于第一臂22的旋转量。
另外,在第二臂23的前端部设置并支承有第三臂24。第三臂24具有轴241。轴241能够相对于第二臂23绕沿着铅垂方向的第三轴O3旋转,且能够沿上下方向移动。该轴241是机械臂20的最前端的臂。
当使轴241旋转的u驱动单元6驱动时,轴241绕z轴旋转。在该旋转时,能够通过第三编码器装置63来检测轴241相对于第二臂23的旋转量。
另外,当使轴241沿z轴方向移动的z驱动单元7驱动时,轴241沿上下方向即z轴方向移动。在该移动时,能够通过第四编码器装置73来检测轴241相对于第二臂23的z轴方向的移动量。
另外,在机器人2中,设定有以轴241的前端为控制点TCP、以该控制点TCP为原点的前端坐标系。另外,该前端坐标系已完成与上述的机器人坐标系的校准,能够将前端坐标系中的位置转换为机器人坐标系。由此,能够通过机器人坐标系来确定控制点TCP的位置。
另外,在轴241的前端部以能够装拆的方式连结有各种末端执行器。作为末端执行器,没有特别限制,例如可列举出把持被输送物的末端执行器、对被加工物进行加工的末端执行器、用于检查的末端执行器等。在本实施方式中,以能够装拆的方式连结末端执行器25。
此外,在本实施方式中,末端执行器25不是机器人2的构成要素,但末端执行器25的一部分或者全部也可以为机器人2的构成要素。
如图1所示,力检测部26对施加于机器人2的力、即施加于机械臂20以及基座21的力进行检测。在本实施方式中,力检测部26设置于基座21的下方、即z轴负方向,从下方支承基座21。
力检测部26例如由石英等压电体构成,能够形成为具有当受到外力时输出电荷的多个元件的结构。另外,控制装置8能够根据该电荷量来转换为机械臂20受到的外力。另外,若是这样的压电体,则可以根据设置的方向来调整在受到了外力时能够产生电荷的方向。
接下来,参照图2以及图3来对第一编码器装置43~第四编码器装置73进行说明。
第一编码器装置43具备第一控制部431和第一检测部432,该第一控制部431具有第一处理器431A、第一存储部431B以及第一通信部431C。
第二编码器装置53具备第二控制部531和第二检测部532,该第二控制部531具有第二处理器531A、第二存储部531B以及第二通信部531C。
第三编码器装置63具备第三控制部631和第三检测部632,该第三控制部631具有第三处理器631A、第三存储部631B以及第三通信部631C。
第四编码器装置73具备第四控制部731和第四检测部732,该第四控制部731具有第四处理器731A、第四存储部731B以及第四通信部731C。
此外,第一编码器装置43~第四编码器装置73除了作为检测旋转量的对象的电动机不同以外均为同样的结构,因此,以下代表性地说明第一编码器装置43。即,第一处理器431A~第四处理器731A是同样的结构,第一存储部431B~第四存储部731B是同样的结构,第一通信部431C~第四通信部731C是同样的结构,第一检测部432~第四检测部732是同样的结构。
第一处理器431A例如由CPU(Central Processing Unit:中央处理单元)构成,能够读入并执行存储于第一存储部431B的各种程序等。
第一存储部431B保存第一处理器431A能够执行的各种程序等。作为第一存储部431B,例如可列举出RAM(Random Access Memory:随机存取存储器)等易失性存储器、ROM(Read Only Memory:只读存储器)等非易失性存储器、具有易失性区域和非易失性区域的存储器等,但在本实施方式中,设为具有易失性区域和非易失性区域的存储器。另外,第一存储部431B也可以是装拆式的外部存储装置。
第一通信部431C与控制装置8进行数据包通信。作为该通信方式,例如可列举出串行通信或并行通信。此外,串行通信既可以是同步式通信,也可以是非同步式通信。
第一检测部432例如具有与电动机41的旋转轴连接的未图示的标尺和读取标尺的旋转的未图示的光学元件。第一检测部432将与标尺的旋转量对应的信号输出到第一控制部431。此外,第一检测部432中的检测方式没有特别限制。
第一控制部431接收从第一检测部432输出的信号,算出电动机41的旋转量。并且,经由第一通信部431C将旋转量的数据发送到控制装置8。
控制装置8基于从第一编码器装置43~第四编码器装置73接收到的数据来控制机械臂20的动作。
如图1以及图2所示,在本实施方式中,控制装置8内置于基座21。此外,如图3所示,控制装置8具有控制机器人2的驱动的功能,与上述的机器人2的各部电连接。控制装置8具有处理器81、存储部82和通信部83。这些各部例如经由总线以能够相互通信的方式连接。
处理器81例如由CPU(Central Processing Unit:中央处理单元)构成,读出并执行存储于存储部82的各种程序等。由处理器81生成的指令信号经由通信部83发送至机器人2。由此,机械臂20能够执行预定的作业。
存储部82保存处理器81能够执行的各种程序等。作为存储部82,例如可列举出RAM(Random Access Memory:随机存取存储器)等易失性存储器、ROM(Read Only Memory:只读存储器)等非易失性存储器、装拆式的外部存储装置等。
通信部83例如使用有线LAN(Local Area Network:局域网)、无线LAN等外部接口而在机器人2的各部以及示教装置3之间分别进行信号的收发。
此外,在图示的构成中,控制装置8是内置于基座21的构成,但在本发明中,并不限制于此,控制装置8也可以配置于基座21的外侧。
接着,对示教装置3进行说明。
如图1及图2所示,示教装置3具有控制机械臂20的动作的功能,具有处理器31、存储部32、通信部33以及显示部34。作为示教装置3,并无特别限制,例如可列举出平板电脑、个人电脑、智能手机等。
处理器31例如由CPU(Central Processing Unit:中央处理单元)构成,读出并执行存储在存储部32中的示教程序等各种程序。此外,示教程序既可以是由示教装置3生成的程序,也可以是由例如CD-ROM等外部记录介质存储的程序,还可以是经由网络等存储的程序。
由处理器31生成的信号经由通信部33发送到机器人2的控制装置8。由此,机械臂20能够在预定的条件下执行预定的作业。另外,处理器31控制图1所示的显示部34的驱动。
存储部32保存处理器31能够执行的各种程序等。作为存储部32,例如可列举出RAM(Random Access Memory:随机存取存储器)等易失性存储器、ROM(Read Only Memory:只读存储器)等非易失性存储器、装拆式的外部存储装置等。
通信部33使用例如有线LAN(Local Area Network:局域网)、无线LAN等外部接口来在与控制装置8之间进行信号的收发。
显示部34由具有显示画面的各种显示器构成。在本实施方式中,作为一个例子,对作为触摸面板式、即显示部34具备显示功能和输入操作功能的结构进行说明。当操作员触摸显示画面时,处理器31进行切换为预定的显示等的控制。
但是,不限制于这样的结构,也可以是另外具备输入操作部的结构。在该情况下,输入操作部例如可列举出鼠标、键盘等。另外,也可以是将触摸面板与鼠标、键盘并用的结构。
以上,对机器人系统100的结构进行了说明。接着,说明对机器人系统100的要素部件设定识别号码的设定方法。所谓要素部件,是指构成机器人系统100的各部分,例如,可列举出第一编码器装置43~第四编码器装置73、电动机41~电动机71、未图示的多个相机、未图示的各种传感器等。以下,作为要素部件,举出第一编码器装置43~第四编码器装置73为例进行说明。另外,将第一要素部件作为第一编码器装置43进行说明,将第二要素部件作为第二编码器装置53进行说明。但是,并不限制于此,第一要素部件及第二要素部件能够设为上述的要素部件中的任意的两个要素部件。
识别号码是表示第一编码器装置43~第四编码器装置73的属性的信息的一部分,具体而言,是在与控制装置8进行通信时用于确定个体的号码。另外,对第一编码器装置43~第四编码器装置73设定彼此不同的识别号码。识别号码已分别设定于第一编码器装置43~第四编码器装置73的状态是指如下的状态:在第一编码器装置43的第一存储部431B存储有第一识别号码、在第二编码器装置53的第二存储部531B存储有第二识别号码、在第三编码器装置63的第三存储部631B存储有第三识别号码、在第四编码器装置73的第四存储部731B存储有第四识别号码。
在这样的状态下,第一编码器装置43~第四编码器装置73能够与控制装置8单独地进行通信。因此,控制装置8可以将从第一编码器装置43接收到的数据确定为是关于电动机41的旋转量的信息,可以将从第二编码器装置53接收到的数据确定为是关于电动机51的旋转量的信息,可以将从第三编码器装置63接收到的数据确定为是关于电动机61的旋转量的信息,可以将从第四编码器装置73接收到的数据确定为是关于电动机71的旋转量的信息。
具体而言,在第一编码器装置43向控制装置8发送数据时,第一编码器装置43的第一处理器431A将第一识别号码例如“1”放入头部分来创建数据,并发送至控制装置8。
同样地,在第二编码器装置53向控制装置8发送数据时,第二编码器装置53的第二处理器531A将第二识别号码、例如“2”放入头部分来创建数据,并发送至控制装置8。
同样地,在第三编码器装置63向控制装置8发送数据时,第三编码器装置63的第三处理器631A将第三识别号码、例如“3”放入头部分来创建数据,并发送至控制装置8。
同样地,在第四编码器装置73向控制装置8发送数据时,第四编码器装置73的第四处理器731A将第四识别号码、例如“4”放入头部分来创建数据,并发送至控制装置8。
在这样的第一编码器装置43~第四编码器装置73中在电源断开时、新品更换时等设定为初始识别号码。即,在第一存储部431B~第四存储部731B中预先存储有初始识别号码。在第一编码器装置43~第四编码器装置73中的每个,该初始识别号码可以相同,也可以不同,但在本实施方式中均为相同,并设为“0”。
在机器人系统100中,针对第一编码器装置43~第四编码器装置73中的每个,设定作为第一识别号码的“1”、作为第二识别号码的“2”、作为第三识别号码的“3”以及作为第四识别号码的“4”。即,控制装置8向第一编码器装置43~第四编码器装置73发出指令,以在第一存储部431B中存储第一识别号码、在第二存储部531B中存储第二识别号码、在第三存储部631B中存储第三识别号码、在第四存储部731B中存储第四识别号码。
在此,如图3~图6所示,控制装置8与第一编码器装置43~第四编码器装置73分别通过总线型通信配线连接。总线型通信配线具有主线84、第一分支通信线85、从主线84分支出的第二分支通信线86、从主线84分支出的第三分支通信线87、以及从主线84分支出的第四分支通信线88。第一编码器装置43经由主线84以及第一分支通信线85而与控制装置8连接。第二编码器装置53经由主线84以及第二分支通信线86而与控制装置8连接。第三编码器装置63经由主线84以及第三分支通信线87而与控制装置8连接。第四编码器装置73经由主线84以及第四分支通信线88而与控制装置8连接。
另外,第一编码器装置43~第四编码器装置73从电源9被供给电力而进行驱动。电源9与第一编码器装置43~第四编码器装置73串联连接。第一编码器装置43与电源9经由第一电气配线91而连接。第一编码器装置43与第二编码器装置53经由第二电气配线92而连接。第二编码器装置53与第三编码器装置63经由第三电气配线93而连接。第三编码器装置63与第四编码器装置73经由第四电气配线94而连接。
另外,第一编码器装置43具有切换对第二电气配线92的通电、断电的开关433。另外,第二编码器装置53具有切换对第三电气配线93的通电、断电的开关533。另外,第三编码器装置63具有切换对第四电气配线94的通电、断电的开关633。在本实施方式中,第一处理器431A对开关433的接通、断开进行切换,第二处理器531A对开关533的接通、断开进行切换,第三处理器631A对开关633的接通、断开进行切换。在此,所谓通电,是指流动有电流或使电流流过。另外,所谓断电,是指未流动有电流或未使电流流过。此外,关于通电、断电的切换时机,将在后面叙述。
开关433可以是第一编码器装置43的构成要件,也可以不是第一编码器装置43的构成要件。开关533可以是第二编码器装置53的构成要件,也可以不是第二编码器装置53的构成要件。开关633可以是第三编码器装置63的构成要件,也可以不是第三编码器装置63的构成要件。
另外,在机器人系统100的电源接通时、或将第一编码器装置43~第四编码器装置73更换为了新品时,在第一编码器装置43~第四编码器装置73分配有作为初始识别号码的“0”。为了使控制装置8与第一编码器装置43~第四编码器装置73单独地进行通信,需要在第一编码器装置43中存储有作为第一识别号码的“1”、在第二编码器装置53中存储有作为第二识别号码的“2”、在第三编码器装置63中存储有作为第三识别号码的“3”、在第四编码器装置73中存储有作为第四识别号码的“4”。但是,在上述那样的总线型通信配线的连接状态下,当控制装置8要向第一编码器装置43~第四编码器装置73分配识别号码时,会向第一编码器装置43~第四编码器装置73随机地分配“1”~“4”的识别号码。在该情况下,无法进行正常的通信,无法正常地驱动机械臂20。
因此,在现有技术中,将用于设定识别号码的外部设备分别与编码器装置连接,对各编码器装置单独设定识别号码,但这样的方法花费时间并且麻烦。因此,在本发明中,即使控制装置8与第一编码器装置43~第四编码器装置73通过总线型通信配线连接,也能够分配所希望的识别号码。以下,对此进行说明。
首先,如图3所示,将开关433、开关533及开关633设为断开的状态。在该情况下,仅向第一编码器装置43供给电力,成为只有第一编码器装置43能够与控制装置8进行通信的状态。在该状态下,控制装置8的处理器81对第一编码器装置43的第一处理器431A发送指令向第一存储部431B写入作为第一识别号码的“1”。由此,第一处理器431A向第一存储部431B写入作为第一识别号码的“1”,完成了对第一编码器装置43的第一识别号码的设定。
当在第一存储部431B中写入了作为第一识别号码的“1”时,如图4所示,第一处理器431A使开关433成为接通的状态即通电状态。由此,对第二编码器装置53供给电力。在该状态下,对第一编码器装置43和第二编码器装置53双方供给有电力。
接着,控制装置8的处理器81对第二编码器装置53的第二处理器531A发送指令向第二存储部531B写入作为第二识别号码的“2”。由此,第二处理器531A向第二存储部531B写入作为第二识别号码的“2”,完成了对第二编码器装置53的第二识别号码的设定。
当在第二存储部531B中写入了作为第二识别号码的“2”时,如图5所示,第二处理器531A使开关533成为接通状态即通电状态。由此,对第三编码器装置63供给电力。在该状态下,对第一编码器装置43、第二编码器装置53以及第三编码器装置63供给有电力。
接着,控制装置8的处理器81对第三编码器装置63的第三处理器631A发送指令向第三存储部631B写入作为第三识别号码的“3”。由此,第三处理器631A向第三存储部631B写入作为第三识别号码的“3”,完成了对第三编码器装置63的第三识别号码的设定。
当在第三存储部631B中写入了作为第三识别号码的“3”时,如图6所示,第三处理器631A使开关633成为接通状态即通电状态。由此,对第四编码器装置73供给电力。在该状态下,对第一编码器装置43~第四编码器装置73全部都供给有电力。
接着,控制装置8的处理器81对第四编码器装置73的第四处理器731A发送指令向第四存储部731B写入作为第四识别号码的“4”。由此,第四处理器731A向第四存储部731B写入作为第四识别号码的“4”,完成了对第四编码器装置73的第四识别号码的设定。
这样,在识别号码设定系统10中,对第一编码器装置43~第四编码器装置73依次设定为通电状态。然后,对已成为通电状态的一个编码器装置分配、设定固有的识别号码。换言之,在着眼于第一编码器装置43~第四编码器装置73中的任意两个例如第一编码器装置43及第二编码器装置53时,控制装置8在向第一编码器装置43供给电力且未向第二编码器装置53供给电力的第一状态下向第一存储部431B写入第一识别号码,在第一识别号码写入后且在向第二编码器装置53供给电力的第二状态下,向第二存储部531B写入与第一识别号码不同的第二识别号码。由此,能够对通过总线型通信配线来与控制装置8连接的第一编码器装置43以及第二编码器装置53设定互不相同的识别号码。即,即使第一要素部件以及第二要素部件通过总线型通信布线与控制装置8连接,也无需如现有技术那样使用外部通信设备来设定识别号码。因此,能够对各要素部件简单且迅速地设定所希望的识别号码。
另外,初始识别号码可以存储在第一存储部431B~第四存储部731B所具有的易失性区域中,也可以存储在非易失性区域中。另外,第一识别号码~第四识别号码可以存储在第一存储部431B~第四存储部731B所具有的易失性区域中,也可以存储在非易失性区域中。
在初始识别号码存储于易失性区域的情况下,也可以是将初始识别号码改写为第一识别号码~第四识别号码即进行覆盖的结构。在该情况下,在第一存储部431B~第四存储部731B中,能够省略非易失性区域,能够简化第一存储部431B~第四存储部731B的结构。
这样,控制装置8将预先存储于第一存储部431B的作为初始识别号码的“0”改写为作为第一识别号码的“1”,将预先存储于第二存储部531B的作为初始识别号码的“0”改写为作为第二识别号码的“2”。由此,在第一存储部431B~第四存储部731B中,能够省略非易失性区域,能够简化第一存储部431B~第四存储部731B的结构。另外,还能够进行第一识别号码~第四识别号码的再设定。
此外,在该情况下,当使机器人系统100的电源断开时,第一识别号码~第四识别号码被消除。
另外,在识别号码设定系统10中,也可以是在第一存储部431B~第四存储部731B的非易失性区域写入第一识别号码~第四识别号码的结构。即,也可以是如下结构:在第一存储部431B具有第一非易失性区域、第二存储部531B具有第二非易失性区域的情况下,控制装置8将第一识别号码写入第一非易失性区域,并将第二识别号码写入所述第二非易失性区域。由此,即使将机器人系统100的电源断开,各识别号码也不会消失,因此在再次接通电源时,能够省略再次设定第一识别号码~第四识别号码。
另外,如上所述,识别号码设定系统10具有:第一电气配线91,其将电源9与作为第一要素部件的第一编码器装置43连接;第二电气配线92,其将第一编码器装置43与作为第二要素部件的第二编码器装置53连接;以及开关433,其切换对第二电气配线92的通电以及断电。由此,通过切换开关433这样的简单的结构,能够依次切换仅向第一编码器装置43供给电力的第一状态和向第二编码器装置53供给电力的第二状态。因此,能够以简单的结构得到后述的本发明的效果。
另外,如上所述,作为第一要素部件的第一编码器装置43具有第一控制部431,第一控制部431对开关433的接通、断开进行切换。由此,与控制装置8对开关433的接通、断开进行切换的结构相比,能够简化控制装置8的控制动作。
另外,在第二状态、即向作为第二要素部件的第二编码器装置53供给有电力的状态下,向作为第一要素部件的第一编码器装置43以及第二编码器装置53双方供给电力。由此,在第二状态下,能够省略将对第一编码器装置43通电的通电状态设为断电状态的工序。此外,如上所述,即使向第一编码器装置43以及第二编码器装置53双方都供给有电力,由于在第一编码器装置43已经设定有第一识别号码,因此也能够对第二编码器装置53设定第二识别号码。
如以上说明的那样,本发明的识别号码设定系统10具备:作为第一要素部件的第一编码器装置43,其具有第一存储部431B,并与从总线型通信配线的主线84分支出的第一分支通信线85连接,且与电源9连接;作为第二要素部件的第二编码器装置53,其具有第二存储部531B,并与从主线84分支出的第二分支通信线86连接,且以能够切换通电以及断电的方式与电源9连接;以及控制装置8,其与主线84连接,并与第一编码器装置43以及第二编码器装置53进行通信。另外,控制装置8在向第一编码器装置43供给电力且未向第二编码器装置53供给电力的第一状态下向第一存储部431B写入第一识别号码,在第一识别号码写入后且在向第二编码器装置53供给电力的第二状态下,向第二存储部531B写入与第一识别号码不同的第二识别号码。由此,能够对通过总线型通信配线与控制装置8连接的第一编码器装置43以及第二编码器装置53设定互不相同的识别号码。即,即使第一要素部件以及第二要素部件通过总线型通信配线与控制装置8连接,也无需如现有技术那样使用外部通信设备来设定识别号码。因此,能够对各要素部件简单且迅速地设定所希望的识别号码。
另外,本发明的机器人系统100具备:机器人,其具有作为第一要素部件的第一编码器装置43和作为第二要素部件的第二编码器装置53,该第一编码器装置43具有第一存储部431B,并与从总线型通信配线的主线84分支出的第一分支通信线85连接,且与电源9连接,该第二编码器装置53具有第二存储部531B,并与从主线84分支出的第二分支通信线86连接,且以能够切换通电以及断电的方式与电源9连接;以及控制装置8,其与主线84连接,并与第一编码器装置43以及第二编码器装置53进行通信。另外,控制装置8在向第一编码器装置43供给电力且未向第二编码器装置53供给电力的第一状态下向第一存储部431B写入第一识别号码,在第一识别号码写入后且在向第二编码器装置53供给电力的第二状态下,向第二存储部531B写入与第一识别号码不同的第二识别号码。由此,即使在将第一编码器装置43以及第二编码器装置53组装于机器人之后,也能够设定第一识别号码以及第二识别号码。即,即使在将第一要素部件以及第二要素部件组装于机器人之后,也能够简单且迅速地设定所希望的识别号码。此外,在本实施方式中,说明了机器人2的基座21具有控制装置8的机器人系统100,但不限于此。例如,也可以从机器人2的外部连接控制装置8来构成机器人系统100。
接着,基于图7所示的流程图来对本发明的识别号码设定方法的一例、即控制装置8的控制动作的一例进行说明。此外,以下,控制装置8执行各步骤,但也可以与示教装置3分担进行。
首先,在步骤S101中,仅向第一编码器装置43~第四编码器装置73中的第一编码器装置43供给电力。即,如图3所示,在使开关433~开关633断开的状态下驱动电源9。进一步换言之,设为向第一编码器装置43供给电力、不向第二编码器装置53供给电力的第一状态。
接着,在步骤S102中,向第一编码器装置43写入第一识别号码。即,对第一编码器装置43的第一处理器431A发送指令向第一存储部431B写入第一识别号码。由此,第一处理器431A向第一存储部431B写入第一识别号码,完成了对第一编码器装置43的第一识别号码的设定。
步骤S102是第一步骤,该第一步骤在向作为第一要素部件的第一编码器装置43供给电力且不向第二编码器装置53供给电力的第一状态下向第一存储部431B写入第一识别号码。
接着,在步骤S103中,判断第一识别号码的写入是否已完成。该判断基于是否从第一处理器431A接收到写入完成信号来进行。
在步骤S103中判断为第一识别号码的写入已完成的情况下,在步骤S104中向第二编码器装置53供给电力。即,如图4所示,向第一处理器431A发送指令使得第一处理器431A将开关433设为接通状态。通过将开关433设为接通状态,从而,来自电源9的电力经由第一编码器装置43供给至第二编码器装置53。换言之,设为向第二编码器装置53供给了电力的第二状态。
接着,在步骤S105中,向第二编码器装置53写入第二识别号码。即,对第二编码器装置53的第二处理器531A发送指令向第二存储部531B写入第二识别号码。由此,第二处理器531A向第二存储部531B写入第二识别号码,完成了对第二编码器装置53的第二识别号码的设定。
接着,在步骤S106中,判断第二识别号码的写入是否已完成。该判断基于是否从第二处理器531A接收到写入完成信号来进行。
在步骤S106中判断为第二识别号码的写入已完成的情况下,在步骤S107中向第三编码器装置63供给电力。即,如图5所示,向第二处理器531A发送指令使得第二处理器531A将开关533设为接通状态。通过将开关533设为接通状态,从而,来自电源9的电力经由第一编码器装置43以及第二编码器装置53供给至第三编码器装置63。换言之,设为向第三编码器装置63供给了电力的第三状态。
接着,在步骤S108中,向第三编码器装置63写入第三识别号码。即,对第三编码器装置63的第三处理器631A发送指令向第三存储部631B写入第三识别号码。由此,第三处理器631A向第三存储部631B写入第三识别号码,完成了对第三编码器装置63的第三识别号码的设定。
接着,在步骤S109中,判断第三识别号码的写入是否已完成。该判断基于是否从第三处理器631A接收到写入完成信号来进行。
在步骤S109中判断为第三识别号码的写入已完成的情况下,在步骤S110中向第四编码器装置73供给电力。即,如图6所示,向第三处理器631A发送指令使得第三处理器631A将开关633设为接通状态。通过将开关633设为接通状态,从而,来自电源9的电力经由第一编码器装置43、第二编码器装置53以及第三编码器装置63供给至第四编码器装置73。换言之,设为向第四编码器装置73供给了电力的第四状态。
接着,在步骤S111中,向第四编码器装置73写入第四识别号码。即,对第四编码器装置73的第四处理器731A发送指令向第四存储部731B写入第四识别号码。由此,第四处理器731A向第四存储部731B写入第四识别号码,完成了对第四编码器装置73的第四识别号码的设定。
接着,在步骤S112中,判断第四识别号码的写入是否已完成。该判断基于是否从第四处理器731A接收到写入完成信号来进行。
在步骤S112中判断为第四识别号码的写入已完成的情况下,结束识别号码设定程序。
此外,步骤S103、步骤S106、步骤S109以及步骤S112中的判断进行至判断为已完成为止。
如以上说明的那样,本发明的识别号码设定方法是对作为第一要素部件的第一编码器装置43和作为第二要素部件的第二编码器装置53设定互不相同的识别号码的设定方法,该第一编码器装置43具有第一存储部431B,并与从总线型通信配线的主线84分支出的第一分支通信线85连接,且与电源9连接,该第二编码器装置53具有第二存储部531B,与从主线84分支出的第二分支通信线86连接,并以能够切换通电和断电的方式与电源9连接。另外,本发明的识别号码设定方法具有:第一步骤,在向第一编码器装置43供给电力且未向第二编码器装置53供给电力的第一状态下,向第一存储部431B写入第一识别号码;以及第二步骤,在第一识别号码写入后,向第二编码器装置53供给电力而从第一状态设为第二状态,并向第二存储部531B写入与第一识别号码不同的第二识别号码。由此,能够对通过总线型通信配线与控制装置8连接的第一编码器装置43以及第二编码器装置53设定互不相同的识别号码。即,即使第一要素部件以及第二要素部件通过总线型通信配线与控制装置8连接,也无需如现有技术那样使用外部通信设备来设定识别号码。因此,能够对各要素部件简单且迅速地设定所希望的识别号码。
第二实施方式
图8是表示在具备本发明的第二实施方式的识别号码设定系统的机器人系统中控制装置与各编码器装置的连接状态的详细框图。
以下,参照图8来对本发明的识别号码设定系统、识别号码设定方法以及机器人系统的第二实施方式进行说明,但以与前面已述的实施方式的不同点为中心进行说明,同样的事项省略其说明。
如图8所示,在本实施方式中,电源9与第一编码器装置43~第四编码器装置73并联连接。即,电源9与第一编码器装置43经由第一电气配线91A连接。另外,电源9与第二编码器装置53经由第二电气配线92A连接。另外,电源9与第三编码器装置63经由第三电气配线93A连接。另外,电源9与第四编码器装置73经由第四电气配线94A连接。这些第一电气配线91A~第四电气配线94A相互电独立。
另外,在本实施方式中,省略图3~图6所示的开关433~开关733,取而代之,具有:切换对第一编码器装置43的通电、断电的开关433A;切换对第二编码器装置53的通电、断电的开关533A;切换对第三编码器装置63的通电、断电的开关633A;以及切换对第四编码器装置73的通电、断电的开关733A。在本实施方式中,开关433A~开关733A由控制装置8控制接通、断开。
根据这样的本实施方式,在对第一编码器装置43~第四编码器装置73设定第一识别号码~第四识别号码时,除了步骤S101、步骤S104、步骤S107以及步骤S110以外,能够与上述第一实施方式同样地进行设定。
在本实施方式中,在步骤S101中,控制装置8使开关433A成为接通的状态。在步骤S104中,控制装置8使开关533A成为接通的状态。在步骤S107中,控制装置8使开关633A成为接通的状态。在步骤S110中,控制装置8使开关733A成为接通的状态。
通过这样的本实施方式,也能够得到与上述第一实施方式相同的效果。特别是,在本实施方式中,在设定了识别号码后,即使将第一编码器装置43~第四编码器装置73中的任意一个编码器装置更换为了新品,通过仅将切换对该编码器装置的通电、断电的开关设为接通状态,也能够仅对该编码器装置设定识别号码。在这样的结构的情况下,第一编码器装置43~第四编码器装置73的第一存储部431B~第四存储部731B在非易失性区域中写入识别号码。
第三实施方式
图9是表示在具备本发明的第三实施方式的识别号码设定系统的机器人系统中控制装置与各编码器装置的连接状态的详细框图。图10是用于说明图9所示的识别号码设定系统所进行的控制动作的流程图。
以下,参照图9来对本发明的识别号码设定系统、识别号码设定方法以及机器人系统的第三实施方式进行说明,但以与前面已述的实施方式的不同点为中心进行说明,同样的事项省略其说明。
如图9所示,在本实施方式中,省略图3至图6所示的开关433~开关733,取而代之,设置有开关433B、开关533B、开关633B以及开关733B。开关433B设置于第一分支通信线85,开关533B设置于第二分支通信线86,开关633B设置于第三分支通信线87,开关733B设置于第四分支通信线88。在本实施方式中,开关4333B~开关733B由控制装置8控制接通、断开。
接着,基于图10所示的流程图来对本发明的识别号码设定方法的一例、即控制装置8的控制动作的一例进行说明。此外,在以下,控制装置8执行各步骤,但也可以与示教装置3分担进行。
此外,步骤S202与步骤S102相同,步骤S203与步骤S103相同,步骤S205与步骤S105相同,步骤S206与步骤S106相同,步骤S208与步骤S108相同,步骤S209与步骤S109相同,步骤S211与步骤S111相同,步骤S212与步骤S112相同,因此省略这些步骤的说明,对步骤S201、步骤S204、步骤S207及步骤S210进行说明。
在步骤S201中,将开关433B设为接通状态,设为控制装置8与第一编码器装置43能够通信的状态、即第一通信状态。此外,在该状态下,开关533B~开关733B为断开状态,第二编码器装置53~第四编码器装置73为不能与控制装置8通信的状态。在这样的第一通信状态下,在步骤S202中,能够对第一编码器装置43设定第一识别号码。
在步骤S204中,将开关533B设为接通状态,设为控制装置8与第二编码器装置53能够通信的状态、即第二通信状态。此外,在该状态下,开关633B以及开关733B为断开状态,第三编码器装置63以及第四编码器装置73为不能与控制装置8通信的状态。在这样的第二通信状态下,在步骤S205中,能够对第二编码器装置53设定第二识别号码。
在步骤S207中,将开关633B设为接通状态,设为控制装置8与第三编码器装置63能够通信的状态、即第三通信状态。此外,在该状态下,开关733B为断开状态,第四编码器装置73为不能与控制装置8通信的状态。在这样的第三通信状态下,在步骤S208中,能够对第三编码器装置63设定第三识别号码。
在步骤S210中,将开关733B设为接通状态,设为控制装置8与第四编码器装置73能够通信的状态、即第四通信状态。此外,在该状态下,开关433B~开关733B为接通状态。在这样的第四通信状态下,在步骤S211中,能够对第四编码器装置73设定第四识别号码。
如以上说明的那样,本发明的识别号码设定系统10具备:作为第一要素部件的第一编码器装置43,其具有第一存储部431B,并与从总线型通信配线的主线84分支出的第一分支通信线85连接,且与电源9连接;作为第二要素部件的第二编码器装置53,其具有第二存储部531B,并与从主线84分支出的第二分支通信线86连接,且以能够切换通电以及断电的方式与电源9连接;以及控制装置8,其与主线84连接,并可以取得能够与第一编码器装置43进行通信且不能与第二编码器装置53进行通信的第一通信状态、和能够与第二编码器装置53进行通信的第二通信状态。并且,控制装置8在第一状态下向第一存储部431B写入第一识别号码,在第一识别号码写入后设为第二通信状态,向第二存储部531B写入与第一识别号码不同的第二识别号码。由此,能够对通过总线型通信配线与控制装置8连接的第一编码器装置43以及第二编码器装置53设定互不相同的识别号码。即,即使第一要素部件以及第二要素部件通过总线型通信配线与控制装置8连接,也无需如现有技术那样使用外部通信设备来设定识别号码。因此,能够对各要素部件简单且迅速地设定所希望的识别号码。
此外,也可以省略第一开关433B。在该情况下,切换开关533B~开关733B的接通、断开的也可以是第一编码器装置43~第三编码器装置63。
以上,基于图示的实施方式对本发明的识别号码设定系统、识别号码设定方法以及机器人系统进行了说明,但本发明并不限制于此,各部分的结构能够置换为具有相同功能的任意结构。另外,识别号码设定系统、识别号码设定方法以及机器人系统也可以分别附加其他任意的结构物、工序。
另外,在上述各实施方式中,作为第一要素部件以及第二要素部件,对构成机器人的要素部件进行了说明,但在本发明中,并不限制于此,例如也能够适用于构成印刷装置的要素部件。在该情况下,作为要素部件,可列举出墨水喷出头、风扇等。
- 识别号码设定系统、识别号码设定方法及机器人系统
- 具有识别号码的自动设定功能的通信系统