智能农业机械玉米秸秆处理一体化收割机
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及农用机械和智能化控制技术领域,特别涉及一种智能农业机械玉米秸秆处理一体化收割机。
背景技术
玉米收割机是在玉米成熟或接近成熟时,根据农艺要求,用机械来完成对玉米收割的作业农机具。
目前,大多数的玉米收割机在收完玉米棒后直接把玉米秸秆撒在农田的表面,申请号为202010871501.2的专利申请文献公开了一种智能农业机械玉米秸秆处理一体化收割机,包括收获机、混合组件、粉碎组件和掩埋组件,收获机的底部开设有出秸口,混合组件还包括第三气缸和翻耕器,第三气缸固定在收获机尾部,翻耕器包括防尘架、翻耕辊、第二电机,防尘架内侧设置毛刷板,使用时,先通过收获机对玉米进行收割,收割后的秸秆会通过出秸口流出,利用翻耕机上的翻耕辊对地面上的秸秆与泥土进行混合,翻耕辊转动时带动防尘架上的毛刷板移动,利用毛刷板移动对翻耕辊上粘附的泥土进行清理,避免泥土粘附在翻耕辊上;粉碎组件包括粉碎箱和粉碎器,粉碎箱与收获机固定连接,粉碎箱位于出秸口的下方,粉碎箱的顶部与出秸口相连通,粉碎器与粉碎箱相连;掩埋组件包括第一气缸和起土犁铲,第一气缸可以设有两个,均滑动连接于收获机尾部的上表面,两个第一气缸的输出端均滑动贯穿于收获机的尾部,起土犁铲可以设置有两个,均位于收获机尾部的下表面,两个起土犁铲均分别与两个第一气缸的输出端固定连接,两个起土犁铲均位于粉碎箱的一侧。
上述玉米秸秆处理一体化收割机的智能化程度不高,变速作业适应差,无法根据泥土情况对,不能秸秆与泥土的混合进行适应性调整,使得秸秆粉碎后处理效果不佳,容易产生粉尘污染,不能保证秸秆处理质量。
发明内容
为了解决上述技术问题,本发明提供了一种智能农业机械玉米秸秆处理一体化收割机,包括收获机构、粉碎组件、混合组件和智能控制系统;
所述收获机构包括收割组件、分离器和出秸口,收割组件用于割断玉米秸秆并送入分离器,分离器用于对玉米和秸秆进行分离,其中秸秆由出秸口送入粉碎组件;
所述粉碎组件对秸秆进行粉碎处理;
所述混合组件包括取土器、混合器和加水器,所述取土器用于挖掘泥土并送入混合器,所述混合器用于将粉碎处理后的秸秆与泥土混合后输出,所述加水器用于向混合器内加水;
所述智能控制系统包括泥土分析器和主控模块,所述主控模块分别与泥土分析器、收获机构、粉碎组件和混合组件连接;所述泥土分析器用于检测分析泥土情况,所述主控模块根据泥土情况采用预设算法对混合组件中秸秆与泥土的混合过程进行控制。
可选的,所述粉碎组件包括切割辊刀和粉碎腔;其中
所述切割辊刀包括辊轴以及安装在辊轴上的切割刀,所述辊轴由驱动装置带动旋转,使得切割刀将秸秆切断成分段,并将分段秸秆送至粉碎腔的入口;
所述粉碎腔内置绞刀和刀轴,所述绞刀的出口端的中心开设有螺纹孔,所述螺纹孔的孔口处设有内锥面,所述刀轴的一端设置于螺纹孔内,刀轴的一端上设有外螺纹和锥台,所述外螺纹与螺纹孔的螺纹相配合,所述锥台与螺纹孔孔口的内锥面相配合,所述刀轴的另一端与固定架转动连接,所述固定架外侧设有端盖,所述固定架绕刀轴周向间隔布置多个出口。
可选的,所述收割组件包括固定齿刃、活动座和活动齿刃;所述活动齿刃与活动座固定连接,所述活动齿刃与活动座位于固定齿刃上方,且活动齿刃与固定齿刃接触并前端对齐,活动齿刃能够相对固定齿刃横向滑移;
所述活动齿刃与活动座之间设有润滑层,所述润滑层上设有弯曲部与平直部,所述弯曲部与固定齿刃相接触,所述平直部的水平高度高于固定齿刃。
可选的,所述主控模块连接有第一称重计,所述第一称重计安装在粉碎组件至混合器的输送线路上,所述第一称重计用于对粉碎后的秸秆重量进行计量。
可选的,所述加水器包括补水管、水箱和供水调节阀,所述补水管安装在水箱上端,所述水箱下端连接供水管,所述供水调节阀安装在供水管上,所述供水调节阀与主控模块电性连接,所述供水管延伸至混合器。
可选的,所述取土器设有高度调节器,所述高度调节器与主控模块电性连接。
可选的,还包括犁沟铲,所述混合组件设有出料口,所述出料口设置在取土器的正后端,所述犁沟铲设置在取土器与出料口之间,所述犁沟铲的底部低于取土器的底部,所述犁沟铲将取土器起土后的土坑变成加深沟,由出料口输出的秸秆与泥土混合物回填入加深沟内。
可选的,所述泥土分析器内置干燥器和第二称重计,所述干燥器对泥土取样进行干燥,所述第二称重计对干燥前、后的泥土取样进行称重,采用以下公式计算泥土的含水率:
上式中,μ
所述预设算法包括以下加水量算法公式:
上式中,Q表示加水量,单位为Kg/s;k表示秸秆的吸水系数;W
根据计算得到的加水量,所述主控模块控制供水调节阀的开度。
可选的,所述预设算法包括取土器的取土深度算法公式:
上式中,H表示取土深度;W
根据计算得到的取土深度,所述主控模块高度调节器对取土器的高度进行调节。
可选的,所述主控模块采用以下公式对取土深度的一致性程度进行分析:
上式中,τ
若取土器取土深度的稳定系数小于预设阈值,则根据稳定系数对取土器的高度进行相应修正。
本发明的智能农业机械玉米秸秆处理一体化收割机,采用包括泥土分析器和主控模块的智能控制系统,可以通过泥土分析器对泥土情况进行分析,根据设定的秸秆与泥土混合比,通过调节取土口高度控制取土量,使得取土量与玉米收割速度相适应;可以适应玉米收割速度存在变速作业的情况,使得秸秆粉碎后处理效果更佳,且通过混合时添加水,可以增强粉碎处理后的秸秆与泥土的粘合与附着性能,降低粉尘产生量与粉尘污染,促进后续秸秆的分解,保证秸秆处理质量。
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
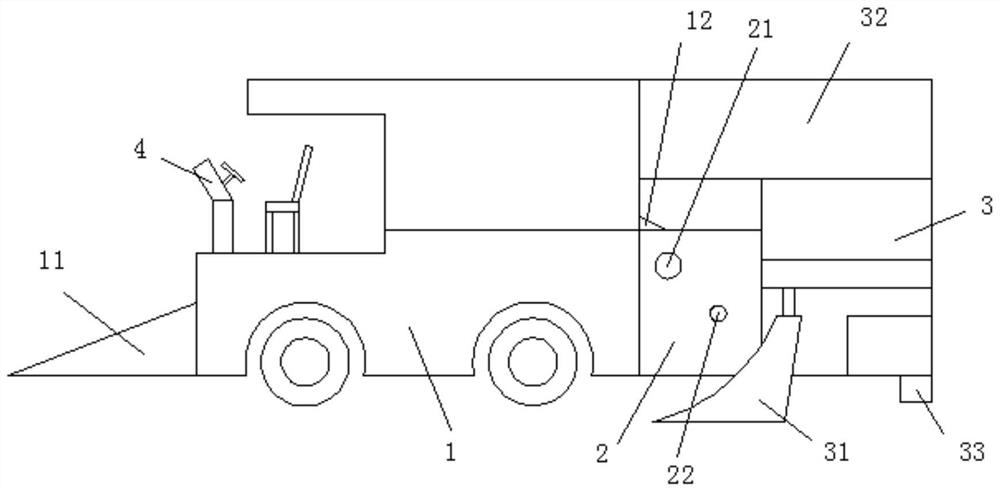
图1为本发明实施例中一种智能农业机械玉米秸秆处理一体化收割机结构示意图;
图2为本发明的智能农业机械玉米秸秆处理一体化收割机实施例采用粉碎组件的粉碎腔结构示意图;
图3为本发明的智能农业机械玉米秸秆处理一体化收割机实施例收获机构采用的收割组件结构立体分拆图。
具体实施方式
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
如图1所示,本发明实施例提供了一种智能农业机械玉米秸秆处理一体化收割机,包括收获机构1、粉碎组件2、混合组件3和智能控制系统4;
所述收获机构1包括收割组件11、分离器和出秸口12,收割组件11用于割断玉米秸秆并送入分离器,分离器用于对玉米和秸秆进行分离,其中秸秆由出秸口12送入粉碎组件2;
所述粉碎组件2对秸秆进行粉碎处理;
所述混合组件3包括取土器31、混合器和加水器32,所述取土器31用于挖掘泥土并送入混合器,所述混合器用于将粉碎处理后的秸秆与泥土混合后输出,所述加水器32用于向混合器内加水;
所述智能控制系统4包括泥土分析器和主控模块,所述主控模块分别与泥土分析器、收获机构1、粉碎组件2和混合组件3连接;所述泥土分析器用于检测分析泥土情况,所述主控模块根据泥土情况采用预设算法对混合组件2中秸秆与泥土的混合过程进行控制。
上述技术方案的工作原理和有益效果为:本方案中的泥土分析器可以安装在取土器处,通过取土器获取泥土取样并进行分析;本发明采用包括泥土分析器和主控模块的智能控制系统,可以通过泥土分析器对泥土情况进行分析,根据设定的秸秆与泥土混合比,通过调节取土口高度控制取土量,使得取土量与玉米收割速度相适应;可以适应玉米收割速度存在变速作业的情况,使得秸秆粉碎后处理效果更佳,且通过混合时添加水,可以增强粉碎处理后的秸秆与泥土的粘合与附着性能,降低粉尘产生量与粉尘污染,促进后续秸秆的分解,保证秸秆处理质量。
在一个实施例中,所述粉碎组件2包括切割辊刀21和粉碎腔22;其中
所述切割辊刀21包括辊轴以及安装在辊轴上的切割刀,所述辊轴由驱动装置带动旋转,使得切割刀将秸秆切断成分段,并将分段秸秆送至粉碎腔的入口23;
所述粉碎腔22内置绞刀24和刀轴25,所述绞刀24的出口端的中心开设有螺纹孔,所述螺纹孔的孔口处设有内锥面,所述刀轴25的一端设置于螺纹孔内,刀轴25的一端上设有外螺纹和锥台,所述外螺纹与螺纹孔的螺纹相配合,所述锥台与螺纹孔孔口的内锥面相配合,所述刀轴25的另一端与固定架26转动连接,所述固定架26外侧设有端盖27,所述固定架26绕刀轴25周向间隔布置多个出口28。
上述技术方案的工作原理和有益效果为:本方案采用的粉碎组件包括切割辊刀和粉碎腔,切割辊刀先对秸秆进行切割分段,再将分段后的秸秆送入粉碎腔,由粉碎腔内置的绞刀对其做进一步粉碎处理,经过两步修理后使得输出的秸秆更为细碎,可以增强后续与泥土混合的粘结性,促进后续分解,加快有机肥力释放速度。
在一个实施例中,所述收割组件包括固定齿刃13、活动座15和活动齿刃14;所述活动齿刃14与活动座15固定连接,所述活动齿刃14与活动座15位于固定齿刃13上方,且活动齿刃14与固定齿刃13接触并前端对齐,活动齿刃14能够相对固定齿刃13横向滑移;
所述活动齿刃14与活动座15之间设有润滑层16,所述润滑层16上设有弯曲部17与平直部,所述弯曲部17与固定齿刃13相接触,所述平直部的水平高度高于固定齿刃13。
上述技术方案的工作原理和有益效果为:本方案采用固定齿刃和活动齿刃的相对滑移,对玉米秸秆采用剪力收割,一方面可以提高收割效率,加速收割速度;另一方面可以降低收割的功率消耗,节省能源;在活动齿刃与活动座之间设有润滑层,可以降低故障率,减少损耗和维护成本。
在一个实施例中,所述主控模块连接有第一称重计,所述第一称重计安装在粉碎组件2至混合器的输送线路上,所述第一称重计用于对粉碎后的秸秆重量进行计量;所述加水器32包括补水管、水箱和供水调节阀,所述补水管安装在水箱上端,所述水箱下端连接供水管,所述供水调节阀安装在供水管上,所述供水调节阀与主控模块电性连接,所述供水管延伸至混合器;所述取土器31设有高度调节器,所述高度调节器与主控模块电性连接。
上述技术方案的工作原理和有益效果为:本方案中的取土器可以采用犁铲,高度调节器可以采用旋转螺杆,补水管可能通过软管与水源连接;通过第一称重计对秸秆进行计量,为后续的混合过程控制提供直观量化的参数支持,有利于取土量和水量的精确调节,有利于混合比例的精确控制,可以降低处理能耗,提高粘结性,促进后续分解,加快秸秆的有机肥力释放速度。
在一个实施例中,还包括犁沟铲,所述混合组件3设有出料口,所述出料口设置在取土器31的正后端,所述犁沟铲设置在取土器31与出料口之间,所述犁沟铲的底部低于取土器31的底部,所述犁沟铲将取土器起土后的土坑变成加深沟,由出料口输出的秸秆与泥土混合物回填入加深沟内。
上述技术方案的工作原理和有益效果为:本方案通过在取土器的正后端设置混合组件的出料口,在取土器与出料口之间设置犁沟铲,对取土后的土坑进行加深,形成加深沟,以便采用混合物回填后不会形成凸起,减少混合物的暴露面积,减少混合物的水份蒸发,促进秸秆分解,加快秸秆的有机肥力释放速度,避免分解释放的有机肥力流失;混合组件的混合器可以包括混合箱以及设置在混合箱内的搅拌器。
在一个实施例中,所述泥土分析器内置干燥器和第二称重计,所述干燥器对泥土取样进行干燥,所述第二称重计对干燥前、后的泥土取样进行称重,采用以下公式计算泥土的含水率:
上式中,μ
所述预设算法包括以下加水量算法公式:
上式中,Q表示加水量,单位为Kg/s;k表示秸秆的吸水系数;W
根据计算得到的加水量,所述主控模块控制供水调节阀的开度。
上述技术方案的工作原理和有益效果为:本方案采用泥土分析器分析泥土的含水率,通过预设算法中的加水量算法公式,计算出混合时所需要的加水量,从而对供水调节阀进行精确控制,既达到增强混合粘结性和促进秸秆分解的目的,又避免混合处理量不合理增加处理能耗。
在一个实施例中,所述预设算法包括取土器的取土深度算法公式:
上式中,H表示取土深度;W
根据计算得到的取土深度,所述主控模块高度调节器对取土器的高度进行调节。
上述技术方案的工作原理和有益效果为:本方案通过预设算法中的取土深度算法公式,计算出相应秸秆需要的泥土量,方案中可以预先设定秸秆与泥土的混合比值、干燥泥土的密度和取土器的平均取土宽度;取土器的速度与玉米秸秆处理一体化收割机进行玉米收割作业时的行进速度一致,从而对用于混合的泥土量进行精确控制,既达到增强混合粘结性和促进秸秆分解的目的,又避免混合处理量不合理增加处理能耗。
在一个实施例中,所述主控模块采用以下公式对取土深度的一致性程度进行分析:
上式中,τ
若取土器取土深度的稳定系数小于预设阈值,则根据稳定系数对取土器的高度进行相应修正。
上述技术方案的工作原理和有益效果为:本方案通过对取土深度的一致性程度进行分析,用上述公式计算得到取土深度的稳定系数,稳定系数越接近1则表面取土深度的一致性程度越高,将稳定系数与预设阈值进行比较,若小于预设阈值,则表明一致性程度不高,对混合比的影响可能产生粘结程度差以及不利于玉米秸秆的分解的后果,因此需要根据稳定系数来调整取土深度,例如:取土深度的修正量可以是原取土深度的(1-τ
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
- 智能农业机械玉米秸秆处理一体化收割机
- 一种智能农业机械玉米秸秆处理一体化收割机