一种应用于下肢康复训练器的腿部长度可调节装置
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及医疗技术领域,特别涉及一种应用于下肢康复训练器的腿部长度可调节装置。
背景技术
康复机器人技术则是近年来迅速发展的一门新兴机器人技术,是机器人技术在医学领域的新应用,也是一种重要的辅助医疗设备。目前康复机器人已成为国际社会研究的热点之一,对于中风、偏瘫、下肢运动技能损伤等患者来说,下肢康复训练机器人有着很好的治疗效果。
目前,下肢康复训练机器人一般具有和人类下肢骨骼类似的穿戴腔体,患者可将下肢穿入其中,利用机械结构和控制器的控制,以及各类力、速度传感器的反馈,可辅助患者进行行走,逐渐使患者下肢恢复正常机能。
现有技术中的下肢康复训练机器人,其穿戴腔体均为一体式设计,各个机械结构部件的尺寸无法轻易变动,同一个型号的穿戴腔体只能适应少数身高或体型的患者,其余患者只能另寻其它型号的下肢康复训练机器人;并且,即使患者使用与自身下肢尺寸相适应的下肢康复训练机器人进行康复训练时,也往往需要进行穿戴腔体的尺寸微调(下肢训练一般需要调节长度);下肢康复训练机器人的腿部结构一般为固定长度或需要借助工具才可以调节,不仅消耗用户的精力、效率低下,也对使用者有一定的要求。
发明内容
本发明主要解决的技术问题是提供一种应用于下肢康复训练器的腿部长度可调节装置,通过旋动环形旋柄,进而旋动第二段管,使得第一段管与第三段管的同时旋进或旋出,从而实现腿部的长度调节。
为解决上述技术问题,本发明采用的一个技术方案是:提供一种应用于下肢康复训练器的腿部长度可调节装置,其连接在下肢康复训练器上,其中,包括用于调节腿部长度的调节机构和用于锁紧所述调节机构的锁紧机构;所述调节机构包括依次连接的第一段管、第二段管和第三段管,所述第一段管的外壁设置有第一外螺纹,所述第三段管的外壁上设置有第二外螺纹,所述第二段管的两端内壁分别设置有用于与所述第一外螺纹进行螺纹连接的第一内螺纹和用于与所述第二外螺纹进行螺纹连接的第二内螺纹;所述第二段管的外壁上设置有环形旋柄。
作为本发明的一种改进,还包括用于引导所述第一段管和第三段管升降运动的导向机构。
作为本发明的进一步改进,所述导向机构包括第一导轨座、第二导轨座和直线导轨,所述第一导轨座固定连接在所述第一段管的内壁上,所述第二导轨座固定连接在所述第三段管的内壁上,所述直线导轨分别套在所述第一导轨座和第二导轨座上,所述第一导轨座与所述第二导轨座均可在所述直线导轨上滑动。
作为本发明的更进一步改进,所述直线导轨的顶端设置有顶塞。
作为本发明的更进一步改进,所述直线导轨为多边形柱体。
作为本发明的更进一步改进,所述直线导轨为长方体。
作为本发明的更进一步改进,所述锁紧机构包括第一锁紧块和第二锁紧块,所述第一锁紧块连接在所述第二段管的外壁上,所述第二锁紧块连接在所述第三段管的外壁上,所述第一锁紧块与所述第二锁紧块螺纹连接。
作为本发明的更进一步,所述第一锁紧块包括一体成型的第一锁紧套和第一圆锥套,所述第一锁紧套上设置有第三内螺纹;所述第二锁紧块包括一体成型的第二锁紧套和第二圆锥套,所述第二锁紧套上设置有用于与所述第三内螺纹进行螺纹连接的第三外螺纹,所述第一圆锥套可套在所述第二圆锥套上。
作为本发明的更进一步,所述第二圆锥套上设置有若干个凹槽。
作为本发明的更进一步,所述环形旋柄上设置有若干个凸条。
本发明的有益效果是:与现有技术相比,本发明通过旋动环形旋柄,进而旋动第二段管,使得第一段管与第三段管的同时旋进或旋出,从而实现腿部的长度调节;其通过三个段管的相互啮合关系,手动旋拧,可快速实现腿部长度的调节,且因上下相反的螺纹设计,使得调节速度提高一倍,大大地提高了调节的便利性、简洁性。
附图说明
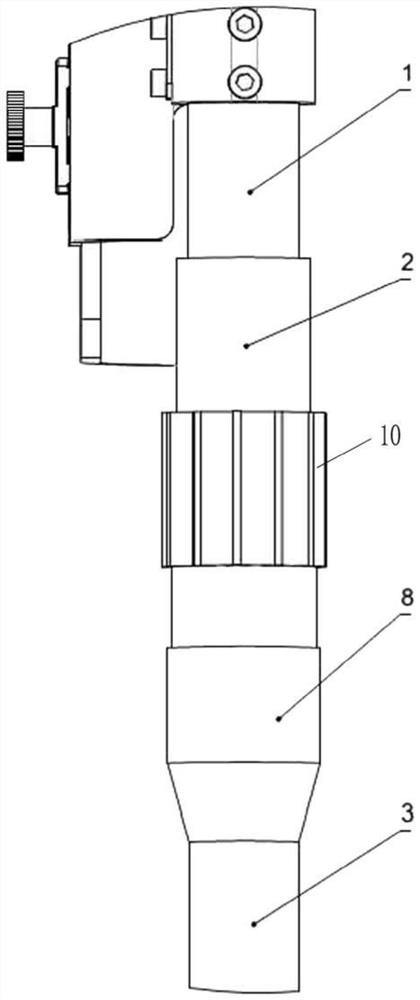
图1为本发明的结构示意图;
图2为本发明的内部连接示意图;
图3为本发明的应用示意图;
图4为本发明的第一段管的外形示意图;
图5为本发明的第二段管的外形示意图;
图6为本发明的第一导轨座的结构示意图;
图7为本发明的锁紧机构的连接示意图;
附图标记:1-第一段管,2-第二段管,3-第三段管,4-第一导轨座, 5-第二导轨座,6-直线导轨,7-顶塞,8-第一锁紧块,81-第一锁紧套, 82-第一圆锥套,9-第二锁紧块,91-第二锁紧套,92-第二圆锥套,93- 凹槽,10-环形旋柄,11-凸条。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
本发明提供一种应用于下肢康复训练器的腿部长度可调节装置,其连接在下肢康复训练器上。
如图1至图7所示,本发明提供一种应用于下肢康复训练器的腿部长度可调节装置包括用于调节腿部长度的调节机构和用于锁紧调节机构的锁紧机构。
如图1和图2所示,调节机构包括依次连接的第一段管1、第二段管2和第三段管3,第一段管1的外壁设置有第一外螺纹,第三段管3 外壁上设置有第二外螺纹,第二段管2两端内壁分别设置有用于与第一外螺纹进行螺纹连接的第一内螺纹和用于与第二外螺纹进行螺纹连接的第二内螺纹;第二段管2外壁上设置有环形旋柄10
本发明通过旋动环形旋柄10而旋动第二段管2使得第一段管1第三段管3同时旋进或旋出,从而实现腿部的长度调节;其通过三个段管的相互啮合关系,手动旋拧,可快速实现腿部长度的调节,且因上下相反的螺纹设计,使得调节速度提高一倍,大大地提高了调节的便利性、简洁性。
在本发明内,环形旋柄10置有若干个凸条,不易打滑。
在本发明内,调节机构由第一段管1、第二段管2、第三段管3构成,通过第一段管1的第一外螺纹与第二段管2的第一内螺纹相配合,第三段管3的第二外螺纹与第二段管2的第二内螺纹配合,保证第一段管1与第三段管3的外螺纹旋向相反,从而通过旋拧第二段管2,实现第一段管1与第三段管3的同时旋进或旋出,从而实现腿部的长度调节。
在本发明内,本发明的一种应用于下肢康复训练器的腿部长度可调节装置还包括用于引导第一段管1和第三段管3升降运动的导向机构。
如图2和图6所示,导向机构包括第一导轨座4、第二导轨座5和直线导轨6,第一导轨座4固定连接在第一段管1的内壁上,第二导轨座5固定连接在第三段管3的内壁上,直线导轨6分别套在第一导轨座 4和第二导轨座5上,第一导轨座4与第二导轨座5均可在直线导轨6 上滑动。
在本发明内,为了便于导向机构的限位,直线导轨6的顶端设置有顶塞;进一步,为了进行轴向限制,直线导轨6为多边形柱体,优选,直线导轨6为长方体;直线导轨6为多边形柱体,可与上述导向机构实现相对滑动,且不发生相对转动,因此当直线导轨6收到外力扭矩时,会带动上述导向机构同时发生转动;具体地讲,导向机构由第一导轨座 4、第二导轨座5、直线导轨6、顶塞7构成,其中第一导轨座4、第二导轨座5分别于第一段管1内壁、第三段管3内壁固定,直线导轨6可以沿着两个导轨座径向移动,且由于非圆形导轨,可以保证第一段管1 与第三段管3的轴向相对静止,其中顶塞7安装在直线导轨6一端,起限位作用。
在本发明内,第一锁紧块8和第二锁紧块9,第一锁紧块8连接在第二段管2的外壁上,第二锁紧块9连接在第三段管3的外壁上,第一锁紧块8与第二锁紧块9纹连接。
进一步,如图7所示,第一锁紧块8括一体成型的第一锁紧套81 一圆锥套82,第一锁紧套81上设置有第三内螺纹;第二锁紧块9包括一体成型的第二锁紧套91和第二圆锥套92,第二锁紧套92上设置有用于与第三内螺纹进行螺纹连接的第三外螺纹,第一圆锥套82可套在第二圆锥套92上;进一步,第二圆锥套92上设置有若干个凹槽93;具体地讲,锁紧机构由第一锁紧块8、第二锁紧块9组成,通过手动旋紧,可实现三段管的锁紧,从而保证在使用过程中三段管不会发生相对转动,其中第一锁紧块8固定在第二段管2外侧一端,第二锁紧块9为可自由活动端,锁紧机构采用螺纹连接,通过内径与第三段管3的外径不同,从而实现锁紧;
在本发明内,第一锁紧块8为内部中空,中空部分内径一端与第二段管2外径相同并固定,第二圆锥套92上设置有若干个凹槽93,第一圆锥套82可以在拧紧第二锁紧块9时提供合理变形锁紧第三段管3;第二锁紧块9为内部中空,第二圆锥套92内径小于第一圆锥套82的内径。第一锁紧块8可压缩可以变形的第二锁紧块9的第二圆锥套92,从而通过摩擦力锁紧第三段管3,实现三段管的锁紧;调节时,需先释放锁紧机构,然后拧动环形旋柄10,从而实现第一段管1和第三段管3的同时缩进和伸出。
本发明通过第一段管1、第三段管3内部的不同旋向外螺纹,保证了当手动拧转第二段管2时,可以双倍调节腿部长度,与此同时,第一段管1、第三段管3内部设计为可滑动的直线导轨6,可确保同时旋进旋出,不发生相对转动;并通过手动锁紧机构,保证整个装置的稳定性,大大地提高了调节的便利性、简洁性。
本发明可实现手动高效率调节腿部长度,能够简便、快捷地实现适用于下肢康复训练等器械的腿部调节,通过锁紧机构使得整个装置安全可靠,,通过三段管的相互啮合关系,手动旋拧,可快速实现腿部长度的调节;且上下相反的螺纹设计,使得调节速度提高一倍,在不借助外部工具的前提下,通过锁紧机构,实现了三段管的锁紧,保证了腿部在运动过程中不会发生相对转动。
本发明的机构部件少、结构紧凑、效率高,与传动调节机构相比在操作便宜性、实用性和操作性上都得到了极大的改善,同时本发明成本低、质量小,可适用于相关下肢康复训练器的腿部调节机构或部位长度调节机构。
以上所述仅为本发明的实施方式,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
- 一种应用于下肢康复训练器的腿部长度可调节装置
- 一种下肢康复训练机器人及其腿部长度调节机构