一种基于信息物理融合的骨折复位机器人系统
文献发布时间:2023-06-19 11:50:46
技术领域
本发明属于骨折复位机器人技术领域,具体涉及一种基于信息物理融合的骨折复位机器人系统。
背景技术
在传统的骨折复位手术中,外科医生需要在对抗患者肌肉张力时消耗大量体能,甚至需要多名经验丰富的医生合力完成一位患者的复位,极大地消耗了医疗资源。同时,在复位过程中,医生无法准确的量化复位精度,采用透视影像将会提高医生的复位精度的控制,但多次并长时间照射X光同样会造成人体危害。随着机器人技术的发展,将机器人技术引入骨外科治疗可能是理想的解决方案。首先,机器人可以提供稳定且可靠的牵引力和复位力。同时,通过引入机器人技术,骨折复位的精度也可以得到量化。机器视觉的引入可以明显的减少骨折复位对于透视影像的依赖,有助于减少医生及患者所受到的辐射伤害。
发明内容
为解决上述背景技术中提出的问题。本发明提供了一种基于信息物理融合的骨折复位机器人系统,单次透视后,利用双目相机的视差原理,结合远端标志物、近端标志物的角点坐标,即可确定远、近端骨断面的位姿关系,通过引导控制电推杆的伸缩状态实施骨折复位手术。
为实现上述目的,本发明提供如下技术方案:一种基于信息物理融合的骨折复位机器人系统,包括工作台,所述工作台顶面的后侧固定安装有后立板,所述后立板的上部固定连接基平台的两侧,所述基平台通过六个后万向节转动连接电推杆的一端,所述电推杆的另一端通过前万向节转动连接远端固定环的后端面,所述远端固定环的一侧固定安装有远端标志物,所述远端固定环前方的工作台的顶面固定安装有第一固定架,所述第一固定架的顶部固定安装有滚轮固定座一和滚轮固定座二,所述滚轮固定座一上对称转动安装有滚轮一,所述滚轮固定座二上对称转动安装有滚轮二,所述滚轮一、滚轮二的内侧夹持安装有转动环,所述转动环的后端面固定安装有连接板,所述连接板的一端开设有调距滑槽,所述连接板的顶端固定安装有双目相机,所述转动环前方的工作台的顶面固定安装有第二固定架,所述第二固定架上固定安装有调高机构,所述调高机构包括下固定架、梯形丝杠、转柄、导杆、滑动台,所述滑动台的顶部通过夹持机构固定安装有近端固定环,所述近端固定环的一侧固定安装有近端标志物。
优选的,所述远端标志物、近端标志物朝向双目相机拍摄端的一面设有ArUco码;利用双目相机的双目视觉的视差原理,结合远端标志物、近端标志物的角点坐标,可最终计算估计远端标志物、近端标志物相对于双目相机的位置及姿态,通过坐标系变换,得到远端标志物相对于远端固定环的位姿、近端标志物相对于近端固定环的位姿以及远端、近端骨断面中心相对于远端固定环、近端固定环的位姿,由于远端骨断面相对于远端固定环固定,近端骨断面相对于近端固定环固定,因此仅需进行一次透视即可实现复位轨迹的计算。
优选的,所述转动环上开设有内螺纹通孔,所述连接板通过后端插入调距滑槽中的螺栓固定连接转动环上的内螺纹通孔;通过调距滑槽滑动调节连接板在转动环上的位置,以改变双目相机与远端标志物、近端标志物之间的距离,从而使远端标志物、近端标志物位于双目相机的合适的视野范围内,方便双目相机的定位。
优选的,所述转动环为扁平的圆环形结构,所述滚轮一的数量为多个,两个为一组前后对称转动连接转动环的前后端面,所述滚轮二的数量为多个,三个为一组左右对称转动连接转动环的内外两侧面;滚轮一、滚轮二可对转动环XYZ轴的方向进行限位,使转动环能够稳定的转动,带动双目相机移动,使远端标志物、近端标志物位于双目相机的合适的视野范围内。
优选的,所述滚轮一、滚轮二为具有弹性的聚氨酯滚轮,所述滚轮固定座一上开设有滑槽一,所述滚轮固定座二上开设有滑槽二;操作人员可通过滑槽一、滑槽二滑动调节滚轮一在滚轮固定座一上的前后位置、滚轮二在滚轮固定座二上的上下位置,从而增大对转动环的摩擦对转动环进行锁定,避免转动环产生转动,从而稳定的固定双目相机的位置。
优选的,所述下固定架的顶侧固定连接第二固定架,所述梯形丝杠的顶端转动连接下固定架的内顶面,所述梯形丝杠的底端转动贯通下固定架的底端且固定连接转柄,所述导杆对称设置在梯形丝杠的左右两侧且上下两端固定连接下固定架的内顶面和内底面,所述滑动台的底部开设有螺纹连接梯形丝杠的内螺纹通孔和滑动连接导杆的垂直通孔,所述夹持机构固定安装在滑动台的顶面上;操作人员可转动转柄通过丝杠结构调节滑动台的高度,从而带动夹持机构上安装的近端固定环上下移动,提高装置的适用性。
优选的,所述后万向节的一端固定连接基平台的前端面,所述后万向节的另一端固定连接电推杆的缸体底端,所述电推杆的推杆顶端固定连接前万向节的一端,所述前万向节的另一端通过螺栓固定连接远端固定环,所述电推杆、前万向节的数量均为六个,所述前万向节绕远端固定环的轴线环向排列,所述后万向节绕基平台的轴线环向排列;六自由度并联机构在空间中具有6个运动自由度,可在理论上为移动骨到达精准位置提供有效的保证。
优选的,包括步骤:
S1、将患者的移动骨(远端骨)与近端骨段分别与远端固定环及近端固定环通过骨针进行牢固的固定,并将远端固定环作为机器人动平台与六个电推杆推杆顶端的前万向节固定,近端固定环通过夹持机构、调高机构与第一固定架固定;
S2、安装结束后,拍摄患者骨折部位的X光影像以确定远端固定环及近端固定环与骨段的位姿关系;
S3、将用于表征骨段位姿的远端标志物、近端标志物分别固定安装在远端固定环和近端固定环上;
S4、调整双目相机的位置角度,使远端标志物、近端标志物位于双目相机合适的视野范围内,双目相机通过测量远端标志物、近端标志物的空间位姿间接获取骨折骨段的位置和姿态,并根据患者的实际骨折状态引导控制电推杆的伸缩状态实施骨折复位手术;
S5、利用可手动调节的线性连杆将远端固定环与近端固定环相连构成骨外固定架并断开外远端固定环、近端固定环与前万向节、夹持机构的连接,即可完成骨折复位的手术及术后固定。
与现有技术相比,本发明的有益效果是:利用双目相机的双目视觉的视差原理,结合远端标志物、近端标志物的角点坐标,可最终计算估计远端标志物、近端标志物相对于双目相机的位置及姿态,通过坐标系变换,得到远端标志物相对于远端固定环的位姿、近端标志物相对于近端固定环的位姿以及远端、近端骨断面中心相对于远端固定环、近端固定环的位姿,由于远端骨断面相对于远端固定环固定,近端骨断面相对于近端固定环固定,因此仅需进行一次透视即可实现复位轨迹的计算;通过调距滑槽滑动调节连接板在转动环上的位置,以改变双目相机与远端标志物、近端标志物之间的距离,从而使远端标志物、近端标志物位于双目相机的合适的视野范围内,方便双目相机的定位;滚轮一、滚轮二可对转动环XYZ轴的方向进行限位,使转动环能够稳定的转动,带动双目相机移动,使远端标志物、近端标志物位于双目相机的合适的视野范围内;操作人员可通过滑槽一、滑槽二滑动调节滚轮一在滚轮固定座一上的前后位置、滚轮二在滚轮固定座二上的上下位置,从而增大对转动环的摩擦对转动环进行锁定,避免转动环产生转动,从而稳定的固定双目相机的位置;操作人员可转动转柄通过丝杠结构调节滑动台的高度,从而带动夹持机构上安装的近端固定环上下移动,提高装置的适用性;六自由度并联机构在空间中具有6个运动自由度,可在理论上为移动骨到达精准位置提供有效的保证。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
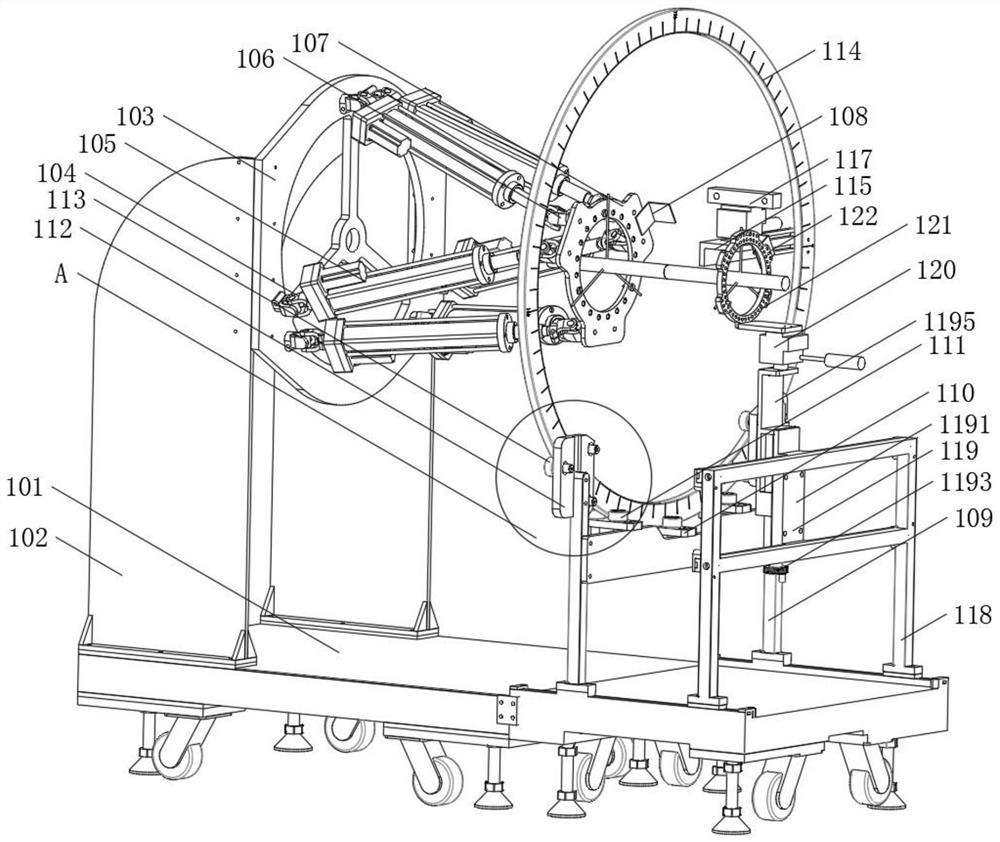
图1为本发明的结构示意图一;
图2为本发明的结构示意图二;
图3为本发明中A的放大图;
图中:101、工作台;102、后立板;103、基平台;104、后万向节;105、电推杆;106、前万向节;107、远端固定环;108、远端标志物;109、第一固定架;110、滚轮固定座一;1101、滑槽一;111、滚轮一;112、滚轮固定座二;1121、滑槽二;113、滚轮二;114、转动环;115、连接板;116、调距滑槽;117、双目相机;118、第二固定架;119、调高机构;1191、下固定架;1192、梯形丝杠;1193、转柄;1194、导杆;1195、滑动台;120、夹持机构;121、近端固定环;122、近端标志物。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
请参阅图1-图3,本发明提供以下技术方案:一种基于信息物理融合的骨折复位机器人系统,包括工作台101,所述工作台101顶面的后侧固定安装有后立板102,所述后立板102的上部固定连接基平台103的两侧,所述基平台103通过六个后万向节104转动连接电推杆105的一端,所述电推杆105的另一端通过前万向节106转动连接远端固定环107的后端面,所述远端固定环107的一侧固定安装有远端标志物108,所述远端固定环107前方的工作台101的顶面固定安装有第一固定架109,所述第一固定架109的顶部固定安装有滚轮固定座一110和滚轮固定座二112,所述滚轮固定座一110上对称转动安装有滚轮一111,所述滚轮固定座二112上对称转动安装有滚轮二113,所述滚轮一111、滚轮二113的内侧夹持安装有转动环114,所述转动环114的后端面固定安装有连接板115,所述连接板115的一端开设有调距滑槽116,所述连接板115的顶端固定安装有双目相机117,所述转动环114前方的工作台101的顶面固定安装有第二固定架118,所述第二固定架118上固定安装有调高机构119,所述调高机构119包括下固定架1191、梯形丝杠1192、转柄1193、导杆1194、滑动台1195,所述滑动台1195的顶部通过夹持机构120固定安装有近端固定环121,所述近端固定环121的一侧固定安装有近端标志物122。
具体的,所述远端标志物108、近端标志物122朝向双目相机117拍摄端的一面设有ArUco码;利用双目相机117的双目视觉的视差原理,结合远端标志物108、近端标志物122的角点坐标,可最终计算估计远端标志物108、近端标志物122相对于双目相机117的位置及姿态,通过坐标系变换,得到远端标志物108相对于远端固定环107的位姿、近端标志物122相对于近端固定环121的位姿以及远端、近端骨断面中心相对于远端固定环107、近端固定环121的位姿,由于远端骨断面相对于远端固定环107固定,近端骨断面相对于近端固定环121固定,因此仅需进行一次透视即可实现复位轨迹的计算。
具体的,所述转动环114上开设有内螺纹通孔,所述连接板115通过后端插入调距滑槽116中的螺栓固定连接转动环114上的内螺纹通孔;通过调距滑槽116滑动调节连接板115在转动环114上的位置,以改变双目相机117与远端标志物108、近端标志物122之间的距离,从而使远端标志物108、近端标志物122位于双目相机117的合适的视野范围内,方便双目相机117的定位。
具体的,所述转动环114为扁平的圆环形结构,所述滚轮一111的数量为多个,两个为一组前后对称转动连接转动环114的前后端面,所述滚轮二113的数量为多个,三个为一组左右对称转动连接转动环114的内外两侧面;滚轮一111、滚轮二113可对转动环114XYZ轴的方向进行限位,使转动环114能够稳定的转动,带动双目相机117移动,使远端标志物108、近端标志物122位于双目相机117的合适的视野范围内。
具体的,所述滚轮一111、滚轮二113为具有弹性的聚氨酯滚轮,所述滚轮固定座一110上开设有滑槽一1101,所述滚轮固定座二112上开设有滑槽二1121;操作人员可通过滑槽一1101、滑槽二1121滑动调节滚轮一111在滚轮固定座一110上的前后位置、滚轮二113在滚轮固定座二112上的上下位置,从而增大对转动环114的摩擦对转动环114进行锁定,避免转动环114产生转动,从而稳定的固定双目相机117的位置。
具体的,所述下固定架1191的顶侧固定连接第二固定架118,所述梯形丝杠1192的顶端转动连接下固定架1191的内顶面,所述梯形丝杠1192的底端转动贯通下固定架1191的底端且固定连接转柄1193,所述导杆1194对称设置在梯形丝杠1192的左右两侧且上下两端固定连接下固定架1191的内顶面和内底面,所述滑动台1195的底部开设有螺纹连接梯形丝杠1192的内螺纹通孔和滑动连接导杆1194的垂直通孔,所述夹持机构120固定安装在滑动台1195的顶面上;操作人员可转动转柄1193通过丝杠结构调节滑动台1195的高度,从而带动夹持机构120上安装的近端固定环121上下移动,提高装置的适用性。
具体的,所述后万向节104的一端固定连接基平台103的前端面,所述后万向节104的另一端固定连接电推杆105的缸体底端,所述电推杆105的推杆顶端固定连接前万向节106的一端,所述前万向节106的另一端通过螺栓固定连接远端固定环107,所述电推杆105、前万向节106的数量均为六个,所述前万向节106绕远端固定环107的轴线环向排列,所述后万向节104绕基平台103的轴线环向排列;六自由度并联机构在空间中具有6个运动自由度,可在理论上为移动骨到达精准位置提供有效的保证。
具体的,包括步骤:
S1、将患者的移动骨(远端骨)与近端骨段分别与远端固定环107及近端固定环121通过骨针进行牢固的固定,并将远端固定环107作为机器人动平台与六个电推杆105推杆顶端的前万向节106固定,近端固定环121通过夹持机构120、调高机构119与第一固定架109固定;
S2、安装结束后,拍摄患者骨折部位的X光影像以确定远端固定环107及近端固定环121与骨段的位姿关系;
S3、将用于表征骨段位姿的远端标志物108、近端标志物122分别固定安装在远端固定环107和近端固定环121上;
S4、调整双目相机117的位置角度,使远端标志物108、近端标志物122位于双目相机117合适的视野范围内,双目相机117通过测量远端标志物108、近端标志物122的空间位姿间接获取骨折骨段的位置和姿态,并根据患者的实际骨折状态引导控制电推杆105的伸缩状态实施骨折复位手术;
S5、利用可手动调节的线性连杆将远端固定环107与近端固定环121相连构成骨外固定架并断开外远端固定环107、近端固定环121与前万向节106、夹持机构120的连接,即可完成骨折复位的手术及术后固定。
本发明的工作原理及使用流程:将患者的移动骨(远端骨)与近端骨段分别与远端固定环107及近端固定环121通过骨针进行牢固的固定,并将远端固定环107作为机器人动平台与六个电推杆105推杆顶端的前万向节106固定,近端固定环121通过夹持机构120、调高机构119与第一固定架109固定,安装结束后,拍摄患者骨折部位的X光影像,以确定远端固定环107及近端固定环121与骨段的位姿关系,然后将用于表征骨段位姿的远端标志物108、近端标志物122分别固定安装在远端固定环107和近端固定环121上,调整双目相机117的位置角度,使远端标志物108、近端标志物122位于双目相机117合适的视野范围内,首先对双目相机117捕获图像通过OpenCV进行高斯模糊及灰度化处理,利用Canny边缘检测算法实现图像边缘的检测,目的是减少图像噪声提高识别的表现,矩形标志物的轮廓通过多边形近似算法进行提取,并利用大律算法将标记内部的图像二值化,最后提取所检测标记的二进制编码用于标志物的识别,在标志物的识别过程中,利用多边形的凸包可以获取标志物角点的像素坐标,利用双目视觉的视差原理,结合标志物的角点坐标,最终计算估计远端标志物108、近端标志物122相对于相机的位置及姿态,通过坐标系变换,得到远端标志物108相对于远端固定环107的位姿、近端标志物122相对于近端固定环121的位姿以及远端、近端骨断面中心相对于远端固定环107、近端固定环121的位姿,并根据患者的实际骨折状态引导控制电推杆105的伸缩状态实施骨折复位手术,复位结束后,利用可手动调节的线性连杆将远端固定环107与近端固定环121相连构成骨外固定架并断开外远端固定环107、近端固定环121与前万向节106、夹持机构120的连接,即可完成骨折复位的手术及术后固定。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包括在本发明的保护范围之内。
- 一种基于信息物理融合的骨折复位机器人系统
- 一种基于信息物理融合系统的家居能源调度方法