多绕组单元无铁心直线永磁同步电机
文献发布时间:2023-06-19 12:00:51
技术领域
本发明涉及一种无铁心直线永磁同步电机。
背景技术
由于直线电机伺服系统具有速度快、加速度高、定位精度高、行程长和动态响应快等优点,在半导体制造装备、高档数控加工装备、高精度测量装备等系统得到越来越广泛的应用。
现有的无铁心直线永磁同步电机初级采用整数槽绕组或分数槽集中绕组,电机的推力密度高、过载能力强,与有铁心结构直线电机相比,推力波动小、低速平稳性好,可以满足工业领域通常的技术需求。
但是,在半导体制造领域,随着集成电路的特征线宽越来越小,现有的无铁心直线电机伺服系统逐渐不能满足光刻机超精密运动控制或超精密定位要求,亟待进一步降低电机的推力波动。
发明内容
本发明的目的是为了克服现有的无铁心直线永磁同步电机伺服系统推力波动较大的问题,提供了一种多绕组单元无铁心直线永磁同步电机。
本发明的多绕组单元无铁心直线永磁同步电机,包括两个次级和一个初级;
两个次级分别设于初级横向的两侧,且两个次级相互连接;
两个次级与初级之间各形成一个气隙;
次级包括一个轭板和多个平板形永磁体;
在每个轭板朝向初级的一个侧面上均沿电机运动方向固定有多个平板形永磁体,且位于轭板两端的两个平板形永磁体的宽度为其他平板形永磁体的宽度的50%;
每个轭板上的平板形永磁体的N极和S极交替排列设置,且双边的次级上的磁路形成串联磁路;相邻的两个平板形永磁体的中心线之间的距离为τ;
初级包括电枢绕组和支撑框架;电枢绕组为三相绕组,该电枢绕组包括2个绕组单元;
每个绕组单元中均包括3k个线圈,线圈沿电机运动方向依次排列固定在支撑框架上,其中,k为正整数;绕组单元中的线圈有三种设置方式:
第一种设置方式:每个绕组单元中相邻的3个线圈不同相,每个绕组单元中相邻的两个线圈对应边之间的距离为
第二种设置方式:每个绕组单元中从第1个线圈开始,每相邻的3个线圈为一线圈组,且每个线圈组中的3个线圈同相,同一绕组单元中相邻两个线圈对应边之间的距离为
第三种设置方式:每个绕组单元中从第1个线圈开始,每相邻的2个线圈为一线圈组,且每个线圈组中的2个线圈同相,同一绕组单元中相邻两个线圈对应边之间的距离为
三种设置方式中,同一绕组单元中每相的k个线圈串联;
三种设置方式中,2个绕组单元中的对应相线圈之间沿电机运动方向的距离相差
进一步地,包括两个次级和一个初级;
两个次级分别设于初级横向两侧,且两个次级相互连接;
两个次级与初级之间各形成一个气隙;
次级包括一个轭板和多个平板形永磁体;
在每个轭板朝向初级的一个侧面上均沿电机运动方向固定有多个平板形永磁体,且位于轭板两端的两个平板形永磁体的宽度为其他平板形永磁体的宽度的50%;
每个轭板上的平板形永磁体的N极和S极交替排列设置,且双边的次级上的磁路形成串联磁路;相邻的两个平板形永磁体的中心线之间的距离为τ;
初级包括电枢绕组和支撑框架;电枢绕组为三相绕组,该电枢绕组包括3个绕组单元;
每个绕组单元中均包括3k个线圈,线圈沿电机运动方向依次排列固定在支撑框架上,其中,k为正整数;绕组单元中的线圈有三种设置方式:
第一种设置方式:每个绕组单元中相邻的3个线圈不同相,每个绕组单元中相邻的两个线圈对应边之间的距离为
第二种设置方式:每个绕组单元中从第1个线圈开始,每相邻的3个线圈为一线圈组,每个线圈组中的3个线圈同相,同一绕组单元中相邻两个线圈对应边之间的距离为
第二种设置方式:每个绕组单元中从第1个线圈开始,每相邻的2个线圈为一线圈组,每个线圈组中的2个线圈同相,同一绕组单元中相邻两个线圈对应边之间的距离为
三种设置方式中,同一绕组单元中每相的k个线圈串联;
三种设置方式中,第一个绕组单元和第二个绕组单元中的对应相线圈沿电机运动方向的距离相差
进一步地,包括两个次级和一个初级;
两个次级分别设于初级横向两侧,且两个次级相互连接;
两个次级与初级之间各形成一个气隙;
次级包括一个轭板和多个平板形永磁体;
在每个轭板朝向初级的一个侧面上均沿电机运动方向固定有多个平板形永磁体,且位于轭板两端的两个平板形永磁体的宽度为其他平板形永磁体的宽度的50%;
每个轭板上的平板形永磁体的N极和S极交替排列设置,且双边的次级上的磁路形成串联磁路;相邻的两个平板形永磁体的中心线之间的距离为τ;
初级包括电枢绕组和支撑框架;电枢绕组为三相绕组,该电枢绕组包括4个绕组单元;
每个绕组单元中均包括3k个线圈,线圈沿电机运动方向依次排列固定在支撑框架上,其中,k为正整数;绕组单元中的线圈有三种设置方式:
第一种设置方式:每个绕组单元中相邻的3个线圈不同相时,每个绕组单元中相邻的两个线圈对应边之间的距离为
第二种设置方式:每个绕组单元中从第1个线圈开始,每相邻的3个线圈为一线圈组,每个线圈组中的3个线圈同相,同一绕组单元中相邻两个线圈对应边之间的距离为
第三种设置方式:每个绕组单元中从第1个线圈开始,每相邻的2个线圈为一线圈组,每个线圈组中的2个线圈同相,同一绕组单元中相邻两个线圈对应边之间的距离为
三种设置方式中,同一绕组单元中每相的k个线圈串联;
三种设置方式中,第一个绕组单元与第二个绕组单元中的对应相线圈沿电机运动方向的距离相差
进一步地,包括两个次级和一个初级;
两个次级分别设于初级横向两侧,且两个次级相互连接;
两个次级与初级之间各形成一个气隙;
次级包括一个轭板和多个平板形永磁体;
在每个轭板朝向初级的一个侧面上均沿电机运动方向固定有多个平板形永磁体,且位于轭板两端的两个平板形永磁体的宽度为其他平板形永磁体的宽度的50%;
每个轭板上的平板形永磁体的N极和S极交替排列设置,且双边的次级上的磁路形成串联磁路;相邻的两个平板形永磁体的中心线之间的距离为τ;
初级包括电枢绕组和支撑框架;电枢绕组为三相绕组,该电枢绕组包括2个绕组单元;
每个绕组单元中均包括3k个线圈,第一个绕组单元中的线圈沿电机运动方向依次排列固定在支撑框架的上表面,第二绕组单元中的线圈沿电机运动方向依次排列固定在支撑框架的下表面;其中,k为正整数;绕组单元中的线圈有三种设置方式:
第一种设置方式:每个绕组单元中相邻的3个线圈不同相,相邻的两个线圈对应边之间的距离为
第二种设置方式:每个绕组单元中从第1个线圈开始,每相邻的3个线圈为一线圈组,每个线圈组中的3个线圈同相,同一绕组单元中相邻两个线圈对应边之间的距离为
第三种设置方式:每个绕组单元中从第1个线圈开始,每相邻的2个线圈为一线圈组,每个线圈组中的2个线圈同相,同一绕组单元中相邻两个线圈对应边之间的距离为
三种设置方式中,同一绕组单元中每相的k个线圈串联;
三种设置方式中,第一个绕组单元和第二个绕组单元的对应相线圈沿电机运动方向的距离相差
进一步地,包括两个次级和一个初级;
两个次级分别设于初级横向两侧,且两个次级相互连接;
两个次级与初级之间各形成一个气隙;
次级包括一个轭板和多个平板形永磁体;
在每个轭板朝向初级的一个侧面上均沿电机运动方向固定有多个平板形永磁体,且位于轭板两端的两个平板形永磁体的宽度为其他平板形永磁体的宽度的50%;
每个轭板上的平板形永磁体的N极和S极交替排列设置,且双边的次级上的磁路形成串联磁路;相邻的两个平板形永磁体的中心线之间的距离为τ;
初级包括电枢绕组和支撑框架;电枢绕组为三相绕组,该电枢绕组包括4个绕组单元;
每个绕组单元中均包括3k个线圈,第一个绕组单元和第二个绕组单元中的线圈沿电机运动方向依次排列固定在支撑框架的上表面,第三个绕组单元和第四个绕组单元中的线圈沿电机运动方向依次排列固定在支撑框架的下表面;其中,k为正整数;绕组单元中的线圈有三种设置方式:
第一种设置方式:每个绕组单元中相邻的3个线圈不同相,同一绕组单元中相邻的两个线圈对应边之间的距离为
第二种设置方式:每个绕组单元中从第1个线圈开始,每相邻的3个线圈为一线圈组,且每个线圈组中的3个线圈同相,同一绕组单元中相邻两个线圈对应边之间的距离为
第三种设置方式:每个绕组单元中从第1个线圈开始,每相邻的2个线圈为一线圈组,且每个线圈组中的2个线圈同相,同一绕组单元中相邻两个线圈对应边之间的距离为
三种设置方式中,同一绕组单元中每相的k个线圈串联;
三种设置方式中,第一个绕组单元和第二个绕组单元中的对应相线圈沿运动方向的距离相差
进一步地,包括两个次级和一个初级;
两个次级分别设于初级横向两侧,且两个次级相互连接;
两个次级与初级之间各形成一个气隙;
次级包括一个轭板和多个平板形永磁体;
在每个轭板朝向初级的一个侧面上均沿电机运动方向固定有多个平板形永磁体,且位于轭板两端的两个平板形永磁体的宽度为其他平板形永磁体的宽度的50%;
每个轭板上的平板形永磁体的N极和S极交替排列设置,且双边的次级上的磁路形成串联磁路;相邻的两个平板形永磁体的中心线之间的距离为τ;
初级包括电枢绕组和支撑框架;电枢绕组为三相绕组,该电枢绕组包括6个绕组单元;
每个绕组单元中均包括3k个线圈,第一个绕组单元、第二个绕组单元和第三个绕组单元中的线圈沿电机运动方向依次排列固定在支撑框架的上表面,第四个绕组单元、第五个绕组单元和第六个绕组单元中的线圈沿电机运动方向依次排列固定在支撑框架的下表面;其中,k为正整数;绕组单元中的线圈有三种设置方式:
第一种设置方式:每个绕组单元中相邻的3个线圈不同相,同一绕组单元中相邻的两个线圈对应边之间的距离为
第二种设置方式:每个绕组单元中从第1个线圈开始,每相邻的3个线圈为一线圈组,且每个线圈组中的3个线圈同相,同一绕组单元中相邻两个线圈对应边之间的距离为
第三种设置方式:每个绕组单元中从第1个线圈开始,每相邻的2个线圈为一线圈组,且每个线圈组中的2个线圈同相,同一绕组单元中相邻两个线圈对应边之间的距离为
三种设置方式中,同一绕组单元中每相的k个线圈串联;
三种设置方式中,第一个绕组单元和第二个绕组单元中的对应相线圈沿运动方向的距离相差
进一步地,包括两个次级和一个初级;
两个次级分别设于初级横向两侧,且两个次级相互连接;
两个次级与初级之间各形成一个气隙;
次级包括一个轭板和多个平板形永磁体;
在每个轭板朝向初级的一个侧面上均沿电机运动方向固定有多个平板形永磁体,且位于轭板两端的两个平板形永磁体的宽度为其他平板形永磁体的宽度的50%;
每个轭板上的平板形永磁体的N极和S极交替排列设置,且双边的次级上的磁路形成串联磁路;相邻的两个平板形永磁体的中心线之间的距离为τ;
初级包括电枢绕组和支撑框架;电枢绕组为三相绕组,该电枢绕组包括8个绕组单元;
每个绕组单元中均包括3k个线圈,第一个绕组单元、第二个绕组单元、第三个绕组单元和第四个绕组单元中的线圈沿电机运动方向依次排列固定在支撑框架的上表面,第五个绕组单元、第六个绕组单元、第七个绕组单元和第八个绕组单元中的线圈沿电机运动方向依次排列固定在支撑框架的下表面;其中,k为正整数;绕组单元中的线圈有三种设置方式:
第一种设置方式:每个绕组单元中相邻的3个线圈不同相,同一绕组单元中相邻的两个线圈对应边之间的距离为
第二种设置方式:每个绕组单元中从第1个线圈开始,每相邻的3个线圈为一线圈组,且每个线圈组中的3个线圈同相,同一绕组单元中相邻两个线圈对应边之间的距离为
第三种设置方式:每个绕组单元中从第1个线圈开始,每相邻的2个线圈为一线圈组,且每个线圈组中的2个线圈同相,同一绕组单元中相邻两个线圈对应边之间的距离为
三种设置方式中,同一绕组单元中每相的k个线圈串联;
三种设置方式中,第一个绕组单元和第二个绕组单元中的对应相线圈沿电机运动方向的距离相差
进一步地,还包括平板形液体冷却换热器;
平板形液体冷却换热器分为两层,两层的平板形液体冷却换热器分别固定在初级朝向气隙两个的侧面上。
进一步地,还包括平板形液体冷却换热器;
平板形液体冷却换热器分为三层,三层的平板形液体冷却换热器分别固定在初级朝向气隙两个的侧面和初级的中心位置。
进一步地,次级为表贴永磁体结构、内嵌永磁体结构或海尔贝克永磁体阵列结构。
本发明的有益效果是:
本发明提出一种多绕组单元无铁心直线永磁同步电机,根据直线电机气隙磁场与电枢绕组电流相互作用产生的电磁推力的特性,电枢绕组通过采用多绕组单元结构,使各绕组单元合理布置,让各绕组单元产生电磁推力的恒定分量相互叠加,而波动分量相互抵消,从而可大大减小电机的推力波动。
附图说明
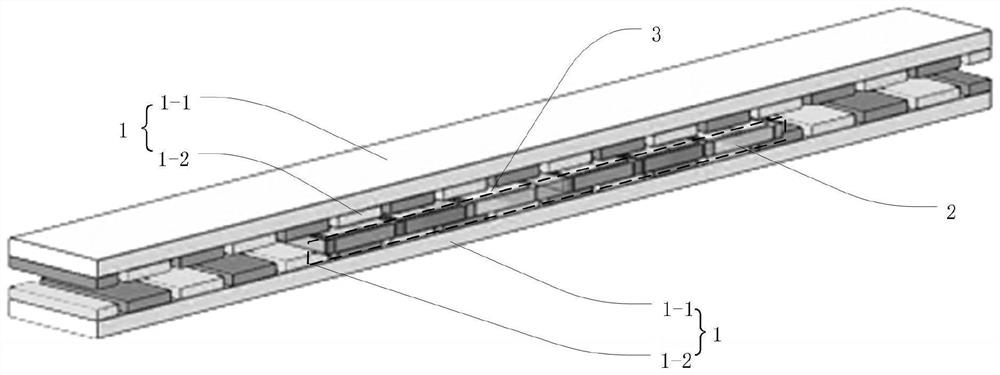
图1为实施例一中的多绕组单元无铁心直线永磁同步电机的结构示意图;
图2为图1的侧视结构示意图;
图3为实施例一中的初级的结构示意图;
图4为图2的俯视结构示意图;
图5为实施例二中的初级的结构示意图;
图6为图5的俯视结构示意图;
图7为实施例三中的初级的结构示意图;
图8为图7的俯视结构示意图;
图9为实施例五中的初级的结构示意图;
图10为图9的俯视结构示意图;
图11为图9的侧视及局部放大结构示意图;
图12为实施例六中的初级的结构示意图;
图13为图12的俯视结构示意图;
图14为图12的侧视及局部放大结构示意图;
图15为实施例七中的初级的结构示意图;
图16为图15的俯视结构示意图;
图17为图15的侧视及局部放大结构示意图;
其中,a表示第一个绕组单元、b表示第二个绕组单元、c表示第三个绕组单元、d表示第个四绕组单元、e表示第五个绕组单元、f表示第六个绕组单元、g表示第七个绕组单元、h表示第八个绕组单元。
具体实施方式
具体实施方式一,本发明的多绕组单元无铁心直线永磁同步电机,主要由一个初级2、两个次级1和两个气隙3构成,两个次级1位于初级2横向两侧,两个次级1机械上连接在一起,两个次级1与初级2之间为两个气隙3。初级2主要由电枢绕组和支撑框架5构成。每个次级1主要由平板形永磁体1-2和轭板1-1构成。沿运动方向,永磁体1-2依次N极、S极交替排列固定在轭板1-1上,次级1前端部和后端部永磁体1-2的运动方向宽度为其它永磁体1-2宽度的50%左右,双边次级1形成串联磁路;相邻的N极与S极中心线之间的距离为τ。电枢绕组为三相绕组,由2个绕组单元构成。每个绕组单元由3k个线圈4构成,k≥1,线圈4为跑道形,沿运动方向依次排列固定在支撑框架5上,每个绕组单元中相邻的3个线圈4属于不同相,每相的k个线圈4串联在一起;每个绕组单元中相邻两个线圈4对应边之间的距离为
最佳实施例一,如图1~图4所示,本实施例的多绕组单元无铁心直线永磁同步电机主要由一个初级2、两个次级1和两个气隙3构成,两个次级1位于初级2横向两侧,两个次级1机械上连接在一起,两个次级1与初级2之间为两个气隙3。初级2主要由电枢绕组和支撑框架5构成。每个次级1主要由平板形永磁体1-2和轭板1-1构成。沿运动方向,永磁体1-2依次N极、S极交替排列固定在轭板1-1上,次级1前端部和后端部永磁体1-2的运动方向宽度为其它永磁体1-2宽度的50%左右,双边次级1形成串联磁路;相邻的N极与S极中心线之间的距离为τ。电枢绕组为三相绕组,由2个绕组单元构成。每个绕组单元由3个线圈4构成,线圈4为跑道形,沿运动方向依次排列固定在支撑框架5上,每个绕组单元中的3个线圈4属于不同相;每个绕组单元中相邻两个线圈4对应边之间的距离为
具体实施方式二,本实施方式的多绕组单元无铁心直线永磁同步电机,主要由一个初级2、两个次级1和两个气隙3构成,两个次级1位于初级2横向两侧,两个次级1机械上连接在一起,两个次级1与初级2之间为两个气隙3。初级2主要由电枢绕组和支撑框架5构成。每个次级1主要由平板形永磁体1-2和轭板1-1构成。沿运动方向,永磁体1-2依次N极、S极交替排列固定在轭板1-1上,次级1前端部和后端部永磁体1-2的运动方向宽度为其它永磁体1-2宽度的50%左右,双边次级1形成串联磁路;相邻的N极与S极中心线之间的距离为τ。电枢绕组为三相绕组,由3个绕组单元构成。每个绕组单元由3k个线圈4构成,k≥1,线圈4为跑道形,沿运动方向依次排列固定在支撑框架5上,每个绕组单元中相邻的3个线圈4属于不同相,每相的k个线圈4串联在一起;每个绕组单元中相邻两个线圈4对应边之间的距离为
最佳实施例二,如图5~图6所示,本实施例二与实施例一的区别在于,本实施例中,电枢绕组为三相绕组,由3个绕组单元构成。每个绕组单元由3个线圈4构成,线圈4为跑道形,沿运动方向依次排列固定在支撑框架5上,每个绕组单元中的3个线圈4属于不同相;每个绕组单元中相邻两个线圈4对应边之间的距离为
具体实施方式三,本实施方式的多绕组单元无铁心直线永磁同步电机,主要由一个初级2、两个次级1和两个气隙3构成,两个次级1位于初级2横向两侧,两个次级1机械上连接在一起,两个次级1与初级2之间为两个气隙3。初级2主要由电枢绕组和支撑框架5构成。每个次级1主要由平板形永磁体1-2和轭板1-1构成。沿运动方向,永磁体1-2依次N极、S极交替排列固定在轭板1-1上,次级1前端部和后端部永磁体1-2的运动方向宽度为其它永磁体1-2宽度的50%左右,双边次级1形成串联磁路;相邻的N极与S极中心线之间的距离为τ。电枢绕组为三相绕组,由4个绕组单元构成。每个绕组单元由3k个线圈4构成,k≥1,线圈4为跑道形,沿运动方向依次排列固定在支撑框架5上,每个绕组单元中相邻的3个线圈4属于不同相,每相的k个线圈4串联在一起;每个绕组单元中相邻两个线圈4对应边之间的距离为
最佳实施例三,如图7~图8所示,本实施例三与实施例一区别在于,本实施例中,电枢绕组为三相绕组,由4个绕组单元构成。每个绕组单元由3个线圈4构成,线圈4为跑道形,沿运动方向依次排列固定在支撑框架5上,每个绕组单元中的3个线圈4属于不同相;每个绕组单元中相邻两个线圈4对应边之间的距离为
具体实施方式四,本实施方式的多绕组单元无铁心直线永磁同步电机,主要由一个初级2、两个次级1和两个气隙3构成,两个次级1位于初级2横向两侧,两个次级1机械上连接在一起,两个次级1与初级2之间为两个气隙3。初级2主要由电枢绕组和支撑框架5构成。每个次级1主要由平板形永磁体1-2和轭板1-1构成。沿运动方向,永磁体1-2依次N极、S极交替排列固定在轭板1-1上,次级1前端部和后端部永磁体1-2的运动方向宽度为其它永磁体1-2宽度的50%左右,双边次级1形成串联磁路;相邻的N极与S极中心线之间的距离为τ。电枢绕组为三相绕组,由2个绕组单元构成。第一绕组单元由3k个线圈4构成,k≥1,线圈4为跑道形,沿运动方向依次排列固定在支撑框架5的上表面,第一绕组单元中相邻的3个线圈4属于不同相,每相的k个线圈4串联在一起;每个绕组单元中相邻两个线圈4对应边之间的距离为
具体实施方式五,本实施方式的多绕组单元无铁心直线永磁同步电机,主要由一个初级2、两个次级1和两个气隙3构成,两个次级1位于初级2横向两侧,两个次级1机械上连接在一起,两个次级1与初级2之间为两个气隙3。初级2主要由电枢绕组和支撑框架5构成。每个次级1主要由平板形永磁体1-2和轭板1-1构成。沿运动方向,永磁体1-2依次N极、S极交替排列固定在轭板1-1上,次级1前端部和后端部永磁体1-2的运动方向宽度为其它永磁体1-2宽度的50%左右,双边次级1形成串联磁路;相邻的N极与S极中心线之间的距离为τ。电枢绕组为三相绕组,由4个绕组单元构成。第一绕组单元和第二绕组单元均由3k个线圈4构成,k≥1,线圈4为跑道形,沿运动方向依次排列固定在支撑框架5的上表面,第一绕组单元和第二绕组单元中相邻的3个线圈4属于不同相,每相的k个线圈4串联在一起;每个绕组单元中相邻两个线圈4对应边之间的距离为
最佳实施例五,如图9~图11所示,本实施例与实施例一的区别在于,本实施例中,电枢绕组为三相绕组,由4个绕组单元构成。第一绕组单元和第二绕组单元均由3个线圈4构成,线圈4为跑道形,沿运动方向依次排列固定在支撑框架5的上表面,第一绕组单元和第二绕组单元中的3个线圈4属于不同相;每个绕组单元中相邻两个线圈4对应边之间的距离为
具体实施方式六,本实施方式的多绕组单元无铁心直线永磁同步电机,主要由一个初级2、两个次级1和两个气隙3构成,两个次级1位于初级2横向两侧,两个次级1机械上连接在一起,两个次级1与初级2之间为两个气隙3。初级2主要由电枢绕组和支撑框架5构成。每个次级1主要由平板形永磁体1-2和轭板1-1构成。沿运动方向,永磁体1-2依次N极、S极交替排列固定在轭板1-1上,次级1前端部和后端部永磁体1-2的运动方向宽度为其它永磁体1-2宽度的50%左右,双边次级1形成串联磁路;相邻的N极与S极中心线之间的距离为τ。电枢绕组为三相绕组,由6个绕组单元构成。第一绕组单元、第二绕组单元、第三绕组单元均由3k个线圈4构成,k≥1,线圈4为跑道形,沿运动方向依次排列固定在支撑框架5的上表面,每个绕组单元中相邻的3个线圈4属于不同相,每相的k个线圈4串联在一起;每个绕组单元中相邻两个线圈4对应边之间的距离为
最佳实施例六,如图12~图14所示,本实施例与实施例一的区别在于,本实施例中,电枢绕组为三相绕组,由6个绕组单元构成。第一绕组单元、第二绕组单元、第三绕组单元均由3个线圈4构成,线圈4为跑道形,沿运动方向依次排列固定在支撑框架5的上表面,每个绕组单元中的3个线圈4属于不同相;每个绕组单元中相邻两个线圈4对应边之间的距离为
具体实施方式七,本实施方式中的多绕组单元无铁心直线永磁同步电机,主要由一个初级2、两个次级1和两个气隙3构成,两个次级1位于初级2横向两侧,两个次级1机械上连接在一起,两个次级1与初级2之间为两个气隙3。初级2主要由电枢绕组和支撑框架5构成。每个次级1主要由平板形永磁体1-2和轭板1-1构成。沿运动方向,永磁体1-2依次N极、S极交替排列固定在轭板1-1上,次级1前端部和后端部永磁体1-2的运动方向宽度为其它永磁体1-2宽度的50%左右,双边次级1形成串联磁路;相邻的N极与S极中心线之间的距离为τ。电枢绕组为三相绕组,由8个绕组单元构成。第一绕组单元、第二绕组单元、第三绕组单元、第四绕组单元均由3k个线圈4构成,k≥1,线圈4为跑道形,沿运动方向依次排列固定在支撑框架5的上表面,每个绕组单元中相邻的3个线圈4属于不同相,每相的k个线圈4串联在一起;每个绕组单元中相邻两个线圈4对应边之间的距离为
最佳实施例七,如图15~图17所示,本实施例与实施例一的主要区别在于,本实施例中,电枢绕组为三相绕组,由8个绕组单元构成。第一绕组单元、第二绕组单元、第三绕组单元、第四绕组单元均由3个线圈4构成,线圈4为跑道形,沿运动方向依次排列固定在支撑框架5的上表面,每个绕组单元中的3个线圈4属于不同相;每个绕组单元中相邻两个线圈4对应边之间的距离为
具体实施方式八,本实施方式的多绕组单元无铁心直线永磁同步电机,与实施方式一~实施方式七中绕组单元中线圈4相序的排列以及相邻线圈4之间的距离有所区别,各绕组单元中从第1个线圈4开始,每相邻的3个线圈4属于同一相,该3个线圈4中间位置线圈4的绕向不同于其它2个线圈4;每个绕组单元中相邻两个线圈4对应边之间的距离为
具体实施方式八,本实施方式的一种多绕组单元无铁心直线永磁同步电机,与实施方式一~实施方式七中绕组单元中线圈4相序的排列以及相邻线圈4之间的距离有所区别,各绕组单元中从第1个线圈4开始,每相邻的2个线圈4属于同一相,该2个线圈4绕向不同;每个绕组单元中相邻两个线圈4对应边之间的距离为
多绕组单元无铁心直线永磁同步电机,电机初级2采用液体冷却,平板形液体冷却换热器分两层,两层分别粘贴固定在初级2的两个气隙3面上;或平板形液体冷却换热器分三层,三层分别粘贴固定在初级2的两个气隙3面上以及初级2中心位置。
多绕组单元无铁心直线永磁同步电机,直线永磁同步电机的次级1为表贴永磁体1-2结构、内嵌永磁体1-2结构或海尔贝克(Halbach)永磁体1-2阵列结构。
上述的多个绕组单元中的对应相线圈4优选为在多个绕组单元中次序相同且同相的线圈4。
- 多绕组单元无铁心直线永磁同步电机
- 非重叠绕组无铁心直线永磁同步电机