一种基于图像圆形物体识别的测距定位方法
文献发布时间:2023-06-19 12:02:28
技术领域
本发明涉及基于一种基于图像圆形物体识别的测距定位方法,该方法涉及数字图像处理、测距、定位等领域。
背景技术
随着技术通信、信息等领域科学技术的飞速发展,数字图像处理、大数据、人工智能等信息技术已广泛应用于生活和生产活动中,特别是数字图像处理技术,已应用于监测、监控、身份识别、文字识别、无人驾驶等领域,很多国内外学者已开始研究应用数字图像处理技术进行目标定位的相关技术。在开放空间一般采用卫星定位技术进行目标定位,但在室内、隧道、煤矿井下等限定空间中,无法接收卫星无线电波信号,无法使用卫星定位技术,因此在限定空间一般采用RSSI、TOA、TDOA等无线电测距技术进行定位。但限定空间中由于物体阻挡等存在无线电波衰减模型复杂,和无线电波的反射、折射等干扰因素,以煤矿井下定位为例,煤矿井下巷道分支、弯曲、倾斜,巷道断面尺寸和形状,巷道围岩及支护,巷道中设备和导体等,均影响着无线电信号传输衰减,无法建立统一的无线电波衰减模型,基于RSSI的井下定位系统误差可达10米以上;煤矿井下还存在巷道分支、弯曲和倾斜,胶轮车、电机车、带式输送机、移动变电站等设备和作业人员等对无线电波的反射、折射,基于TOA、TDOA等无线电测距技术的定位系统定位精度最高为0.3米,定位精度难以进一步提高。应用数字图像处理技术进行目标定位,可从不同的技术层面解决现有限定空间中定位技术的问题。使用图像识别进行定位的主要需要解决定位标志物的识别问题和测距问题,特别是图像特征较为明显的圆形物体的识别和测距问题,因此需要一种适合煤矿等限定空间环境的、简单有效、建设成本低且定位精度高的定位方法,进而保障生产作业的安全。
发明内容
本发明提供了一种基于图像圆形物体识别的测距定位方法,利用平面圆形的特有特征,实现对图像采集设备的定位。所述方法可有效去除图像中的干扰噪声,并去除图像中直线、矩形、多边型等轮廓包含直线线段的物体,快速、准确地识别平面圆形物体,进而实现精确定位,解决了限定空间中无线电定位定位精度无法进一步提高的技术问题。所述方法兼具快速性和准确性等优点,易于程序实现,有望在煤矿井下等限定空间中的移动目标定位领域得到广泛推广应用。
所述测距定位方法包括:在监测区域内放置已知直径的平面的圆形物体,通过摄像机采集监测区域内的数字图像,对数字图像进行处理,判定圆形物体,对包括圆形物体的图像进行测距,得到摄像机圆形物体的距离,实现摄像机的测距定位;所述判定圆形物体的过程包括预处理、粗过滤处理、检测圆形处理;
所述预处理用于得到边缘二值化图像;
所述粗过滤处理用于检测和去除边缘二值化图像中的直线与多边形;
所述检测圆形处理用于检测经过粗过滤后图像中的圆形物体。
所述预处理的过程包括:
(1)灰度化处理,将彩色图像转换为灰度图像;
(2)平滑降噪,去除灰度图像中的噪声像素;
(3)寻找梯度模值及方向;
(4)梯度幅值的非极大化抑制;
(5)边缘连接及二值化输出。
1.所述预处理的过程进一步包括:设边缘二值图像在直角坐标系所有非零点的集合为E=(e
(1)选取边缘二值化图像中像素点连通的线上的五个点e
(2)计算是否满足(y
(3)计算是否满足(y
(4)判定是否遍历所有非零点,如未遍历则返回步骤(1)继续执行,否则结束粗过滤处理过程。
2.所述预处理的过程进一步包括:建立五维坐标系OBCDEF的五维参数空间,将五维参数空间均匀量化分隔为l个格子,量化分隔的格子单元集合为U={u
(1)在E′集合中随机选取五个点e
(2)将步骤(1)选取的五个点的坐标分别代入以下公式
x
得到方程组
求解该方程组,若有解则执行步骤(2),否则返回步骤(1);
(3)判定步骤(2)得到的椭圆参数u
如满足则执行步骤(4),否则返回步骤(1);
(4)将步骤(2)得到的椭圆参数u
,则u
(5)判定是否遍历所有非零点,如未遍历则返回步骤(1)继续执行,否则输出满足T
如满足则认为检测到椭圆,其参数为u
(6)计算椭圆长轴
输出长轴长度d,结束检测圆形处理的过程。
3.所述预处理的过程进一步包括:根据公式u=f(d)实现摄像机的测距定位,式中u为摄像机到圆形物体的距离,d检测圆形处理得到的图像中圆形物体投影椭圆的长轴长度;所述公式的确定方法为,选择一个已知直径的圆模板,通过所述摄像头采集多组不同距离圆模板图像,通过预处理、检测圆形处理获得成像椭圆的长轴长d,将椭圆长轴长d和距离u通过拟合的手段得到两者的函数关系u=f(d)。
附图说明
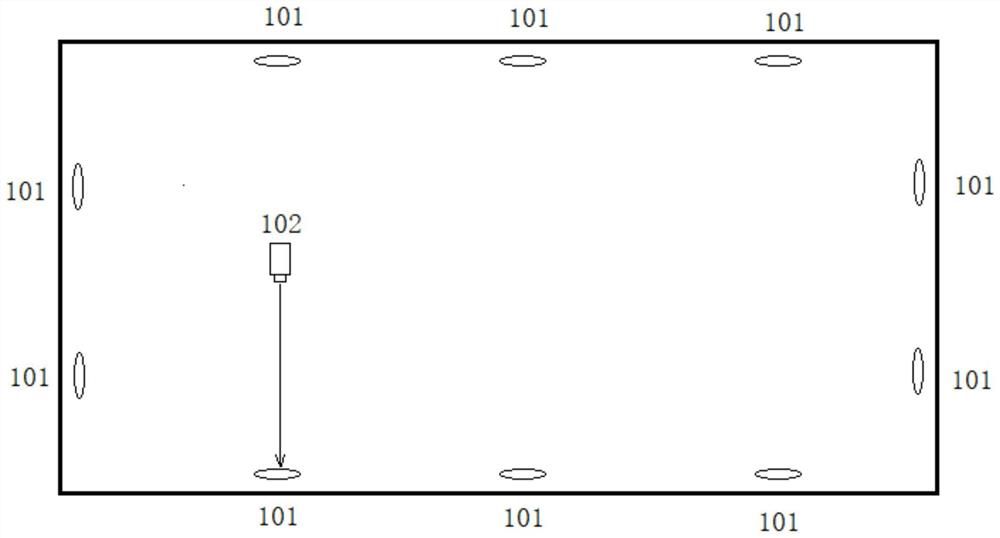
图1一种基于图像圆形物体识别的测距定位方法应用示例图。
图2一种基于图像圆形物体识别的测距定位方法总体流程图。
图3判定圆形物体总流程图。
图4预处理流程图。
图5粗过滤处理流程图。
图6检测圆形处理流程图。
具体实施方式
所述基于图像圆形物体识别的测距定位方法应用示例如图1所示,在一个矩形限定空间中,在边缘间隔一定距离放置具有唯一性特征的平面的圆形物体作为标志物(101),移动目标携带摄像机(102)采集包括标志物的图像,应用所述测距定位方法可检测到图像中的标志物并测距定位。
基于图像圆形物体识别的测距定位方法总体流程如图2所示,步骤包括:
1.(201)移动目标携带摄像机采集包括作为标志物的圆形物体图像。
2.(202)对步骤(201)所采集的图像进行判定圆形物体处理,判定图像中是否包括作为标志物的圆形物体,如判定包括圆形物体,则执行(203),否则结束此次处理过程,返回重新采集图像并处理。
3.(203)对经过步骤(202)判定处理的图像进行测距处理,根据图像中圆形物体的投影椭圆长轴计算得到摄像机与圆形物体距离,进而根据圆形物体的位置得到摄像机的位置。
判定圆形物体包括的处理步骤如图3所示,包括:
1.(301)预处理,用于得到边缘二值化图像。
2.(302)粗过滤处理,用于检测和去除边缘二值化图像中的直线与多边形。
3.(303)检测圆形处理,用于检测经过粗过滤后图像中的圆形物体投影椭圆,并获得椭圆长轴。
预处理包括的处理步骤如图4所示,包括:
1.(401)灰度化处理,将彩色图像转换为灰度图像。使用的灰度化算法为加权平均法,其算法公式为f(x,y)=0.299×R(x,y)+0.587×G(x,y)+0.114×B(x,y),其中式中,f(x,y)为坐标(x,y)处图像灰度化后输出的灰度值,R(x,y)、G(x,y)、B(x,y)分别为红、绿、蓝三个通道的值。
2.(402)平滑降噪,去除灰度图像中的噪声像素。使用的高斯平滑函数为:
3.(403)寻找梯度模值及方向。使用Sobel算子计算梯度,可以得到相对明亮粗壮的边缘。过程如下:
水平方向的差分G
竖直方向的差分G
其中A(x,y)是以点(x,y)为中心以该模板为窗口内的所有点。
梯度模值M(x,y):
梯度方向θ(x,y):
θ(x,y)=arctan[G
梯度角度θ范围从弧度-π到π,然后将它近似到四个方向,分别代表水平,垂直和两个对角线方向(0°,45°,90°,135°)
4.(404)梯度幅值的非极大化抑制。寻找像素点局部最大值,将非极大值点所对应的灰度值置为0,去除大部分的非边缘点,具体过程:对于一点P(x,y),计算点梯度方向与其8连通邻域点所组成的正方形的交点(x
5.(405)边缘连接及二值化输出。消除因噪声的影响造成的本应该连续的边缘出现断裂的问题,得到边缘二值图。设定两个阈值一大一小将边缘像素分为三类:强边缘点、弱边缘点、非边缘点。即边缘像素点梯度值比设定的高阀值大,就标记为强边缘点。若边缘梯度值在高阀值和低阀值之间,则认为是弱边缘点。若低于低阀值的点,认为是非边缘像素点直接被置零抑制掉。最后采用再对弱边缘点的8连通领域像素进行检查,只要有强边缘点存在,那么这个弱边缘点被认为是真是边缘保留下来。最后留下的点连接起来,得到边界图。根据灰度图的特点,背景和主体一般可区分为两个部分,用程序计算图像两部分之间的类间方差,这个类间方差值越大,说明两部分的差别越大,分割的效果越好,这样通过全局阈值得到一个0到1之间的标准化灰度值,获得一个自适应阈值作为二值化的分割依据将图片变为黑白二值图像。
粗过滤处理包括的步骤如图5所示,包括:
1.(501)选取边缘二值化图像中像素点连通的线上的五个点e
2.(502)计算判定是否满足(y
3.(503)计算判定是否满足(y
4.(504)置零5个点及其连通域像素。
5.(505)判定是否遍历了所有点,如已遍历则结束粗过滤处理,否则返回(501)继续执行。
检测圆形处理包括的步骤如图6所示,检测圆形处理需先建立五维坐标系OBCDEF的五维参数空间,将五维参数空间均匀量化分隔为l个格子,量化分隔的格子单元集合为U={u
1.(601)随机选取五个点e
2.(602)将(x
,解方程组,若有解则执行(603),否则返回(601)。
3.(603)判定(602)得到的椭圆参数u
如满足则执行(604),否则返回(605)。
4.(604)将(603)得到的椭圆参数u
5.(605)判定是否遍历了所有点,如已遍历则执行(606),否则返回(601)继续执行。
6.(606)判定存在满足T
7.(607)判定(606)得到的椭圆参数u
如满足则执行(608),),否则判定未检测到圆形物体,结束检测圆形处理的过程。
8.(608)计算椭圆长轴d,
输出长轴长度d,结束检测圆形处理的过程。
- 一种基于图像圆形物体识别的测距定位方法
- 基于图像的井下人员测距定位监测方法