基于UWB技术的四向穿梭车相对位置定位方法和系统
文献发布时间:2023-06-19 12:24:27
技术领域
本发明属于自动化仓储设备及其控制技术领域,具体涉及基于UWB技术的四向穿梭车相对位置定位方法和系统。
背景技术
四向穿梭车为应用于立库存储货物搬运用途,可以在货架轨道上四向换向行驶的搬运车辆,包括传感、行驶、换向、顶升、控制、通讯5大功能模块,四向穿梭车和四向穿梭车提升机、穿梭车货架共同构成四向穿梭车立库的硬件设施;
四向穿梭车的运行由部署在局域网内服务器上的调度控制系统进行车辆运行调度和控制,为了执行准确的调度和控制判断,需要四向穿梭车实时向调度控制系统反馈自身的绝对位置信息。
现有的四向穿梭车绝对位置确定有两大类方式:
1.根据相对运行距离推算绝对位置
通过电机上的编码器计算四向穿梭车的相对运行距离,通过根据起点位置叠加相对运行距离确定目前四向穿梭车的绝对位置。
这种方式的根本问题是其并非是真正的绝对位置反馈,容错率较低,编码器的误差、轨道的形变、四向穿梭车换向行驶导致的误差等持续积累均后可能导致计算的绝对位置不准确。所以这种方式虽成本较低,但一般只能用于库内同层只有一台四向穿梭车工作的场景下,否则容易因绝对位置偏差较大导致调度系统在控制时依据错误信息进行判断导致的车辆碰撞等风险,或因车辆路径交叉虽未碰撞但触发避障传感器导致车辆急停。
而即使在一台四向穿梭车工作的情况下,如果编码器发生异常也可能导致车辆在库中“迷失”,需要人工协助其重新初始化,在穿梭车位于高层且搬运较重货物时极为困难。
2.在各个货位和通道处均部署RFID标签、贴二维码或条形码(可选的),同时在车体上部署对应的传感器,通过车辆行驶到对应位置后传感器的读数来进行绝对定位。这种方式虽可以在功能上满足绝对定位的需求,但实际操作上还是会有诸多困难。
采用RFID的方式:每个货位均需要额外设置专用的位置部署RFID标签,增加实施的复杂度和成本,同时工业RFID读码器本身成本也较高;相邻位置的RFID标签容易误读。
贴二维码或条码方式:每个货位均需要额外设置专用的位置贴条码,且对贴码的位置精度要求较高,增加实施的复杂度和成本;随仓库长时间运行,贴码易产生积灰或污损影响相机识读,导致错误或失效,而立库高层清理或换码困难。
发明内容
本发明的目的在于克服现有技术存在的问题,提供基于UWB技术的四向穿梭车相对位置定位方法和系统。
为实现上述技术目的,本发明采用如下技术方案:
一种基于UWB技术的四向穿梭车相对位置定位方法,包括:
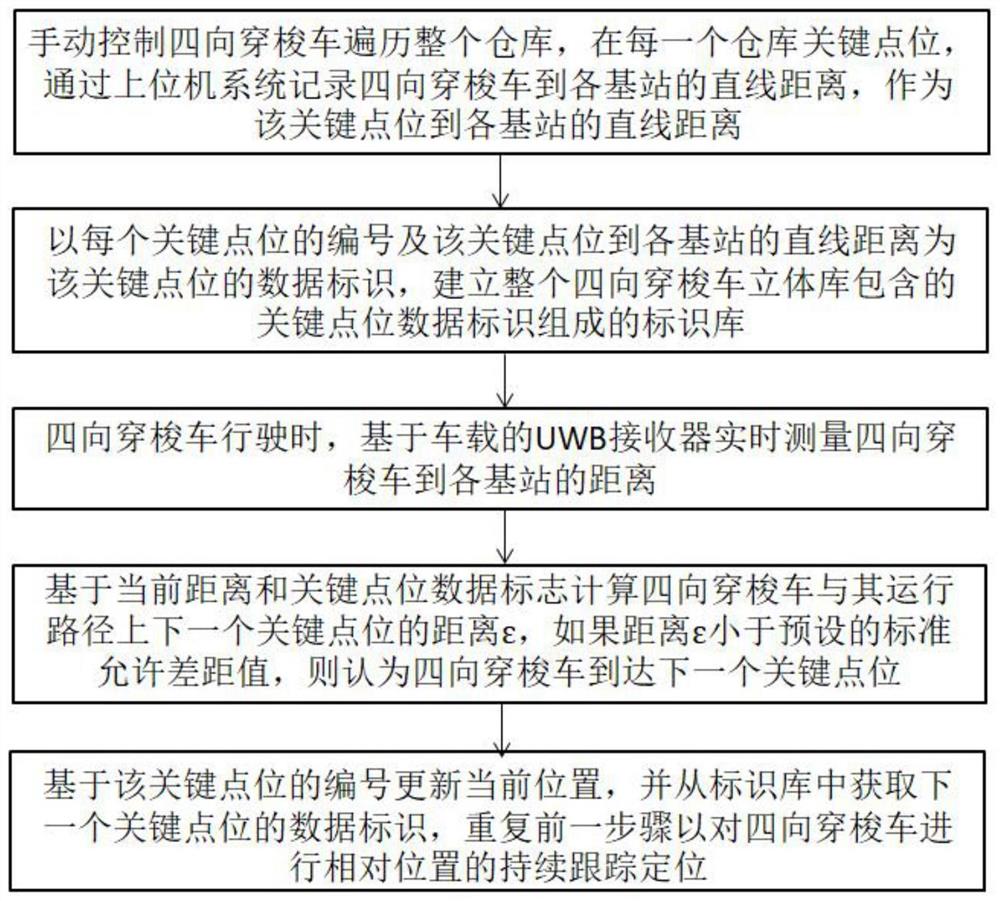
S1手动控制四向穿梭车遍历整个仓库,在每一个仓库关键点位,通过上位机系统记录四向穿梭车到各基站的直线距离,作为该关键点位到各基站的直线距离;
S2以每个关键点位的编号及该关键点位到各基站的直线距离为该关键点位的数据标识,建立整个四向穿梭车立体库包含的关键点位数据标识组成的标识库;
S3四向穿梭车行驶时,基于车载的UWB接收器实时测量四向穿梭车到各基站的距离;
S4基于当前距离和关键点位数据标志计算四向穿梭车与其运行路径上下一个关键点位的距离ε,如果距离ε小于预设的标准允许差距值,则认为四向穿梭车到达下一个关键点位;
S5基于该关键点位的编号更新当前位置,并从标识库中获取下一个关键点位的数据标识,重复S4~S5以对四向穿梭车进行相对位置的持续跟踪定位。
作为一种优选的实施方式,所述仓库中布置至少3台UWB基站。
作为一种优选的实施方式,UWB基站通过市电供电,UWB接收器通过四向穿梭车自身锂电池供电,无需考虑断电失效问题。
作为一种优选的实施方式,所述UWB接收器安装于四向穿梭车钢制外壳上,不易受信号干扰。
作为一种优选的实施方式,将四向穿梭车立体库的货位图划分为方格图,其中一个货位/通道位为一个方格,以方格作为关键点位,对方格编号。
作为一种优选的实施方式,所述S3中,四向穿梭车到基站的实时距离基于TOA法或TDOA法计算。
作为一种优选的实施方式,所述S4中,基于下式计算四向穿梭车到下一个点位的距离ε:
式中,R
作为一种优选的实施方式,所述S4中,通过四向穿梭车的控制器或上位机系统的调度控制模块进行定位计算。
作为一种优选的实施方式,将四向穿梭车到各基站的实时距离通过通讯模块上报至调度控制模块,由调度控制模块进行定位计算。
本发明的另一目的在于提供基于UWB技术的四向穿梭车相对位置定位系统,包括:
UWB基站,布设于仓库内;
UWB发射器,搭载于四向穿梭车上;
上位机系统,包括:
标识库创建模块,基于关键点位的编号及关键点位到各基站的直线距离组成的关键点位数据标识,创建由整个四向穿梭车立体库包含的关键点位数据标识组成的标识库;
调度控制模块,用于四向穿梭车调度控制;
四向穿梭车控制器,包括:
数据存储模块,存储整个四向穿梭车立体库包含的关键点位数据标识组成的标识库;
数据采集模块,获取UWB发射器实时发送的信号,并发送至测距模块;
测距模块,基于UWB发射器的信号计算四向穿梭车与各基站的当前距离;
和/或定位模块,基于当前距离和关键点位数据标志计算四向穿梭车与其运行路径上下一个关键点位的距离ε,预设标准允许差距值,如果距离ε小于标准允许差距值,则认为四向穿梭车到达下一个关键点位;
基于该关键点位的编号更新当前位置,并从标识库中获取下一个关键点位的数据标识,重复前述步骤,以对四向穿梭车进行相对位置的持续跟踪定位;
所述定位模块设置于上位机系统的调度控制模块中,或四向穿梭车控制器中。
本发明考虑到四向穿梭车在仓库内行驶时路径相对受约束(只能在轨道上行走而不能脱离轨道),将其绝对位置(X,Y,Z)由三维进行降维,对四向穿梭车的定位方式进行简化,以降低运算处理难度,该方法和系统实施方式简单,易于操作且成本低,对后续的运维没有特殊要求。
附图说明
图1是本发明方法流程图。
具体实施方式
下面结合附图说明和具体实施方式对本发明的技术方案进行进一步阐述。
实施例中基于UWB信号的距离采用现有的TOA(time of arrival)到达时间法或TDOA(Time Difference 0fArrival)到达时间差法计算。
在四向穿梭车的钢制外壳外部搭载UWB接收器。其与四向穿梭车的控制器相连,控制器通过通讯模块将UWB接收器接收到的强度信号发送给部署在服务器上的上位机系统。
在仓库内初步部署n个UWB基站(n≥3),UWB基站初步部署后,控制四向穿梭车行走经过每一个仓库的每一个库位(货位/通道),将其接收器读取到的UWB强度信号通过控制模块和通讯模块反馈到上位机系统,上位机系统自动记录并判断信号强度是否满足预设的最小值要求,无法满足的应通过增设基站或调整基站位置的方式进行优化,避免局部库位信号不能可靠的覆盖。完成UWB基站部署后基站位置固定。
UWB基站通过市电供电,UWB接收器通过四向穿梭车自身锂电池供电。
将四向穿梭车立体库的货位图划分为方格图,其中一个货位/通道位为一个方格,以方格作为关键点位,对方格编号。
手动控制四向穿梭车遍历整个仓库,在每一个仓库关键点位(货位、通道位),均通过上位机系统的标识库创建模块记录其对应的四向穿梭车到基站i的直线距离R
实际工作中,上位机系统的调度控制模块依据四向穿梭车的当前位置和出入库任务情况计算出需要调度哪台四向穿梭车执行任务,将任务动作及运行路径下发给四向穿梭车的控制器。
若四向穿梭车运行路径上的下一个位置m数据标识为(R
式中,R
同时预先设定一个标准允许差距值ε
若ε<ε
另一种实施方式中,考虑到四向穿梭车本体控制器一般选用计算能力较为受限的PLC,为进一步减轻四向穿梭车本地的计算负担,将四向穿梭车将运行时实时测量到的距各个基站的距离(r
- 基于UWB技术的四向穿梭车相对位置定位方法和系统
- 一种四向穿梭车连续定位系统与方法