一种钻爆法隧道炮孔空间形态测试装置及方法
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及隧道工程技术领域,具体涉及一种钻爆法隧道炮孔空间形态测试装置及方法。
背景技术
隧道施工中,由爆破造成的超欠挖是个严重而普遍的问题,它对隧道施工速度和成本有着不容忽视的影响。在超欠挖相对严重的情况下,对隧道的稳定性也会产生一定的影响。由于爆破引起的断面超欠挖虽然是不可避免的,但可以控制在相对理想的状态。良好的爆破技术可以使超欠挖控制在一定的水平之内,也就是说可以把对围岩的损伤控制在一定的水平之内。因此,实施控制超欠挖的监测技术是十分必要的。
钻孔技术对隧道超欠挖量的影响主要是周边炮孔的外插角、开口位置和钻孔的深度,在钻孔施工时,外插角往往不是个定值,钻孔是曲线,因此,钻孔内在空间形态的不确定性导致放置在其中的炸药也存在了空间位置的不确定性,这对研究由于炸药施爆引起的隧道开挖量带来了挑战。
因此,针对隧道深孔钻爆施工超欠挖控制问题,在钻孔技术方面,亟待研发出一种能监测出钻孔内在空间形态的装置,构建在爆破前的钻孔沿轴向的几何形态数据库,并与爆破后的该位置变更后数据对比,得到该位置点处爆破开挖量,为研究爆破参数对爆破开挖的影响提供数据基础,以此对隧道的爆破施工提供指导意义。
综上所述,急需一种钻爆法隧道炮孔空间形态测试装置及方法以解决现有技术中存在的问题。
发明内容
本发明目的在于提供一种钻爆法隧道炮孔空间形态测试装置,旨在解决现有的隧道炮孔内在空间特征无法确定的问题,具体技术方案如下:
一种钻爆法隧道炮孔空间形态测试装置,包括孔口定位器、柔性传感器、终端采集器和牵引件,所述孔口定位器设置于炮孔的孔口处,用于孔口中心三维空间坐标的确定;所述柔性传感器一端与牵引件连接,所述牵引件牵引柔性传感器贯穿孔口定位器进入炮孔内部,所述柔性传感器沿着炮孔的长度方向设置且在重力作用下与炮孔的底部孔壁接触,所述柔性传感器用于检测炮孔全长的空间形态;所述终端采集器与柔性传感器连接,用于采集所述柔性传感器的检测数据。
以上技术方案中优选的,所述孔口定位器包括定位面板和圆管,所述定位面板上设有圆孔,所述圆管设置于定位面板上且与圆孔同轴线设置,所述圆管的外径与炮孔的内径相匹配。
以上技术方案中优选的,所述定位面板背离炮孔的一面设有定位丝,所述定位丝的中心与圆孔的中心同轴线,所述定位丝用于测量设备测量时定位。
以上技术方案中优选的,所述定位面板的轮廓尺寸大于孔口的轮廓尺寸。
以上技术方案中优选的,所述柔性传感器包括第二电缆和n个传感器单元,n个所述传感器单元等间距沿着第二电缆依次设置,相邻的传感器单元之间能相对运动,所述第二电缆与终端采集器连接;其中n为大于等于2的自然数。
以上技术方案中优选的,所述传感器单元包括MEMS三向传感器,所述MEMS三向传感器套设于所述第二电缆上。
以上技术方案中优选的,所述传感器单元还包括配重块,所述配重块套设于所述MEMS三向传感器上。
本发明还提供了一种钻爆法隧道炮孔空间形态测试方法,采用上述测试装置,包括以下步骤:
步骤S1:将孔口定位器安装于炮孔的孔口处;采用测量设备测量并计算孔口定位器的三维空间坐标(x
步骤S2:牵引件与柔性传感器的端部连接,牵引件牵引柔性传感器贯穿孔口定位器进入炮孔内部,直至炮孔的孔底;
步骤S3:柔性传感器沿着炮孔的长度方向对炮孔底部孔壁的各个位置进行测量,终端采集器采集柔性传感器的检测数据并进行计算,获得沿炮孔长度方向底部孔壁各个位置的空间位置坐标数据;
步骤S4:根据孔口定位器的三维空间坐标(x
步骤S5:拆卸测试装置。
以上技术方案中优选的,所述步骤S3中根据下式计算底部孔壁各个位置的空间位置坐标数据:
其中,Δl为两个相邻MEMS三向传感器间的中心间距;x
以上技术方案中优选的,还包括:将孔口定位器的三维空间坐标(x
本发明提出了一种明晰炮孔内在几何形态的测试装置及测试方法,具有以下有益效果:
1)柔性传感器沿着炮孔的长度方向设置且在重力作用下与炮孔的底部孔壁接触,可以实现检测炮孔全长的空间形态;具体地,通过MEMS三向传感器的微机电系统测斜,能实时、精确测量炮孔的内部结构,能真实反映孔内的真实曲斜度。MEMS三向传感器上配置配重块,实现在重力作用下传感器单元与底部孔壁贴合,防止个别传感器单元未与底部孔壁接触造成数据误差,保证测量的精度以及数据的可靠性。
2)通过牵引件将柔性传感器牵引进入炮孔内部,作业便捷;检测数据自动采集且还可以上传至云平台,用户可线上管理测试结果,省去了数据的拷贝和人工处理,终端采集器可自动还原深钻孔轴向的真实曲线图(即还原炮孔的内在空间形态及生成三维图形),为研究爆破参数对爆破开挖的影响提供数据基础,即对爆破的超欠挖研究提供了数据基础。
3)本发明的测试装置具有环境干扰小,精度高的优点,即使在恶劣的环境下亦然可以正常使用,并且只需要采用平板、工业计算机进行数据接收,操作简单,且可重复循环使用。
除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
附图说明
构成本申请的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
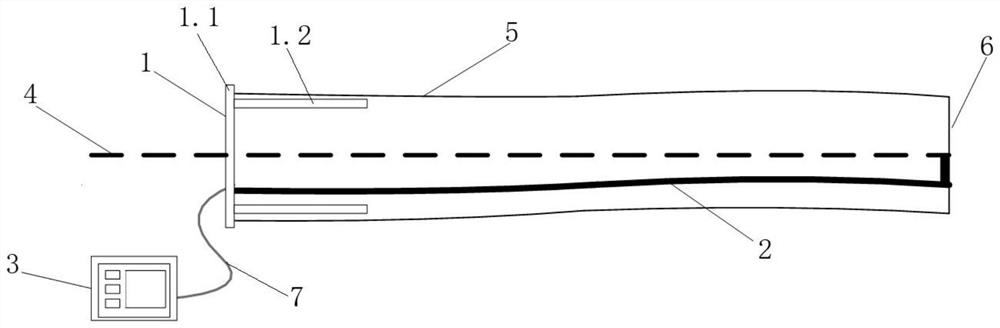
图1是本发明测试装置的整体结构示意图;
图2是孔口定位器的正面视图;
图3是柔性传感器的结构示意图;
图4是柔性传感器的断面图;
图5是MEMS三向传感器的工作原理图;
其中,1、孔口定位器,1.1、定位面板,1.2、圆管,1.3、定位丝,1.4、圆孔,2、柔性传感器,2.1、第二电缆,2.2、传感器单元,2.2.1、MEMS三向传感器,2.2.2、配重块,3、终端采集器,4、牵引件,5、炮孔,6、孔底,7、第一电缆。
具体实施方式
为了便于理解本发明,下面将对本发明进行更全面的描述,并给出了本发明的较佳实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
实施例1:
参见图1-4,一种钻爆法隧道炮孔空间形态测试装置,包括孔口定位器1、柔性传感器2、终端采集器3和牵引件4,所述孔口定位器1设置于炮孔5的孔口处,用于孔口中心三维空间坐标的确定;所述柔性传感器2一端与牵引件4连接,所述牵引件4牵引柔性传感器2贯穿孔口定位器1进入炮孔5内部,所述柔性传感器2沿着炮孔5的长度方向设置且在重力作用下与炮孔5的底部孔壁接触,所述柔性传感器2用于检测炮孔全长的空间形态;所述终端采集器3与柔性传感器2连接,用于采集所述柔性传感器2的检测数据,同时终端采集器还可以将数据上传至云平台,参见图1,本实施例中所述终端采集器3通过第一电缆7与柔性传感器2连接,需要说明的是,图1中示意的是牵引件4牵引柔性传感器2进入炮孔5的状态示意图,此处未示意出柔性传感器2与底部孔壁接触。
参见图1和图2,所述孔口定位器1包括定位面板1.1和圆管1.2,所述定位面板1.1上设有圆孔1.4,所述圆孔1.4用于牵引件4和柔性传感器2穿过,所述圆管1.2设置于定位面板1.1上且与圆孔1.4同轴线设置,所述圆管1.2的外径与炮孔5的内径相匹配,本实施例中具体是圆管1.2的外径与炮孔的内径相等,从而实现孔口定位器1稳定的安装在炮孔中。
优选的,所述定位面板1.1背离炮孔5的一面设有定位丝1.3,所述定位丝1.3的中心与圆孔1.4的中心同轴线,所述定位丝1.3为十字形,所述定位丝1.3用于测量设备测量时定位,所述测量设备具体是全站仪,本实施例中的测试装置配合测量设备实现确定孔口中心三维空间坐标。
优选的,所述定位面板1.1的轮廓尺寸大于孔口的轮廓尺寸;所述定位面板1.1为圆形,所述定位面板1.1的半径为炮孔半径的两倍以上,实现定位面板1.1可以完全覆盖炮孔。
本实施例中定位面板1.1选用5mm厚金属铝板,圆孔1.4的直径为3cm,圆管1.2为壁厚5mm的筒状金属管,管长10cm,即孔口定位器可以插入炮孔内10cm。
参见图3,所述柔性传感器2包括第二电缆2.1和n个传感器单元2.2,n个所述传感器单元2.2等间距沿着第二电缆2.1依次设置,相邻的传感器单元2.2之间能相对运动,所述第二电缆2.1与终端采集器3连接,所述第二电缆2.1通过第一电缆7与终端采集器3连接;其中n为大于等于2的自然数。
参见图4,所述传感器单元2.2包括MEMS三向传感器2.2.1,所述MEMS三向传感器2.2.1套设于所述第二电缆2.1上。所述传感器单元2.2还包括配重块2.2.2,所述配重块2.2.2套设于所述MEMS三向传感器2.2.1上。优选的,所述配重块为铅块,通过配重块实现在重力作用下传感器单元与底部孔壁接触。
优选的,相邻传感器单元2.2之间的间距为0.2m-0.5m,n个传感器单元2.2通过第二电缆2.1依次连接,形成绳状的柔性传感器;柔性传感器2通过牵引件4牵引进入炮孔内部,直至孔底6,柔性传感器在重力作用下落在炮孔底部的孔壁上,各传感器单元沿着炮孔的深度方向(即长度方向)均匀设置。所述牵引件4为杆状件,实现伸入炮孔内部。
本实施例还提供了一种采用上述测试装置的炮孔空间形态测试方法,包括以下步骤:
步骤S1:将孔口定位器1安装于炮孔5的孔口处;采用测量设备测量并计算孔口定位器1的三维空间坐标(x
步骤S2:牵引件4与柔性传感器2的端部连接,牵引件4牵引柔性传感器2贯穿孔口定位器1进入炮孔5内部,直至炮孔5的孔底6;同时将柔性传感器2与终端采集器3通过第一电缆7进行连接。
步骤S3:柔性传感器2沿着炮孔5的长度方向对炮孔5底部孔壁的各个位置进行测量,终端采集器3采集柔性传感器2的检测数据并进行计算,获得沿炮孔5长度方向底部孔壁各个位置的空间位置坐标数据;
优选的,所述步骤S3中根据下式计算底部孔壁各个位置的空间位置坐标数据:
其中,Δl为两个相邻MEMS三向传感器间的中心间距,为固定值;x
具体的计算原理请参阅图5,图5中,O为孔口起始点;P
步骤S4:根据孔口定位器1的三维空间坐标(x
具体施工中,炮孔的直径是已知的(爆破炮孔孔径是均匀的),得到底部孔壁各个位置的空间位置坐标数据后,将底部孔壁的坐标加上炮孔的半径即得到炮孔对应轴线处的坐标,从而得到炮孔的孔轴线各个位置的坐标数据。
步骤S5:拆卸测试装置。拆卸后重复步骤S1-S5,实现对其他炮孔进行测量。
获得检测数据后,将孔口定位器1的三维空间坐标(x
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。