一种用于吊轨式巡检机器人的导轨转换装置和方法
文献发布时间:2023-06-19 13:51:08
技术领域
本发明涉及巡检设备的技术领域,尤其涉及能够对厂房、隧道等区域进行巡检的巡检设备,具体地,本发明涉及一种吊轨式巡检机器人的导轨转换装置和方法。
背景技术
本申请的吊轨式巡检机器人可以用于对厂房、隧道等多种区域或场景。尤其,本申请的吊轨式巡检机器人可以作为管廊机,在需要进行管廊巡检的场景中进行应用。但是,现有的吊轨式巡检机器人功能单一,只能简单的直线行走或者转弯,转弯角度的调整也有限,不能适应城市复杂的地下管道,尤其是涉及到导轨转向时,不能很好地进行转向。
发明内容
本发明解决的问题是吊轨式巡检机器人在轨道上运行时只能直走或者进行固定角度的转弯,不能适应轨道转弯情况较复杂的地下管道的技术问题,实现的吊轨式巡检机器人在导轨运行过程中能以任意角度转弯的技术效果。
为解决上述问题,本发明提供一种用于吊轨式巡检机器人的导轨转换装置,导轨转换装置与至少两个运行导轨配合,导轨转换装置包括:旋转机构,旋转机构和至少两个运行导轨相配合;驱动装置,驱动装置和旋转机构相连,并用于驱动旋转机构在第一位置和第二位置之间切换;其中,至少两个运行导轨包括第一运行导轨和第二运行导轨,旋转机构在第一位置与第一运行导轨对接,并在第二位置与第二运行导轨对接。
与现有技术相比,采用该技术方案所达到的技术效果:导轨转换装置和至少两个运行导轨相配合,当导轨转换装置和吊轨式巡检机器人所在的第一运行导轨相配合时,吊轨式巡检机器人能够从第一运行导轨运行到导轨转换装置上;吊轨式巡检机器人运行到导轨转换装置后停止运行,导轨转换装置通过旋转机构旋转,导轨转换装置能够和第二运行导轨相配合,配合后吊轨式巡检机器人继续运行,通过导轨转换装置和第二运行导轨配合,吊轨式巡检机器人继续前行能够运行到第二运行导轨上。导轨转换装置上设有旋转机构,吊轨式巡检机器人能够运行到旋转机构,吊轨式巡检机器人停止后能跟随旋转机构旋转到任意角度,从而改变运行方向。驱动装置和旋转机构连接,能够控制旋转机构在运行导轨之间旋转。通过导轨转换装置和至少两个运行轨道相配合,能够实现吊轨式巡检机器人在运行过程中方向的改变。
在本发明的一个实例中,旋转机构包括:旋转导轨;至少一个旋转架,至少一个旋转架和旋转导轨连接;其中,旋转导轨在第一位置与第一运行导轨对接,并在第二位置与第二运行导轨对接;至少一个旋转架在第一位置与第二运行导轨对接,并在第二位置与第一运行导轨对接。
与现有技术相比,采用该技术方案所达到的技术效果:旋转架能够对旋转导轨起到一定的支撑和平衡作用,旋转架和旋转导轨分别和不同的运行导轨配合,能够实现接通一个运行导轨和阻断另一个运行导轨的效果。
在本发明的一个实例中,旋转导轨包括:旋转底板,旋转底板和旋转导轨贴合连接。
与现有技术相比,采用该技术方案所达到的技术效果:旋转底板和旋转导轨通过接触面贴合连接,增大了两者的接触面积,使连接更加紧密安全,不易脱落。
在本发明的一个实例中,至少一个旋转架包括:防撞块,防撞块设于至少一个旋转架和至少两个运行导轨相配合的一端。
与现有技术相比,采用该技术方案所达到的技术效果:在旋转架和运行导轨配合的一端设有防撞块能够防止其他运行导轨上也有吊轨式巡检机器人行驶过来和旋转导轨上的吊轨式巡检机器人相撞。。
在本发明的一个实例中,驱动装置包括:输出轴,输出轴的周侧设有至少一个第一加强筋,至少一个第一加强筋将输出轴的周侧包围,至少一个第一加强筋和输出轴连接。
与现有技术相比,采用该技术方案所达到的技术效果:输出轴和旋转机构相连接的一端,周侧设有至少一个加强筋能够让输出轴带动旋转机构旋转时更加稳固。
在本发明的一个实例中,输出轴的轴端面设有底座,旋转底板中部设有凹槽,凹槽和底座配合固定。
与现有技术相比,采用该技术方案所达到的技术效果:通过底座和凹槽相互配合,能够更好的将输出轴和旋转机构固定在一起。
在本发明的一个实例中,至少一个旋转架的一端和至少一个第一加强筋连接。
与现有技术相比,采用该技术方案所达到的技术效果:输出轴通过加强筋和旋转架相连,能够提高两者之间的稳固程度。
在本发明的一个实例中,旋转底板的底面设有至少两个第二加强筋,至少两个第二加强筋和至少一个第一加强筋连接。
与现有技术相比,采用该技术方案所达到的技术效果:至少两个第二加强筋和输出轴上的至少一个第一加强筋相连接,进一步稳固了输出轴和旋转底板之间连接的稳固性。
在本发明的一个实例中,至少两个运行导轨用于供吊轨式巡检机器人行走,导轨转换装置还包括:控制模块;感应模块,感应模块和控制模块通信连接,感应模块用于感应吊轨式巡检机器人位置。
与现有技术相比,采用该技术方案所达到的技术效果:通过控制模块实现对导轨转换装置的控制。通过感应模块实现吊轨式巡检机器人和导轨转换装置的配合。
在本发明的一个实施例中,一种导轨转换装置的控制方法,控制方法包括:在吊轨式巡检机器人沿至少两个运行导轨中的任一轨道向导轨转换装置行走的情况下,控制驱动装置驱动旋转机构在第一位置和第二位置之前切换,以使得旋转机构与任一轨道对接。
与现有技术相比,采用该技术方案所达到的技术效果:通过导轨转换控制方法,能够实现导轨转换装置和运行导轨、吊轨式巡检机器人配合,实现吊轨式巡检机器人在导轨转换装置上的方向转换。
采用本发明的技术方案后,能够达到如下技术效果:
(1)通过导轨转换装置,能够实现吊轨式巡检机器人在运行过程中方向的转换;
(2)在导轨转换装置上设有旋转架,能够在一个吊轨式巡检机器人转换运行方向时避免其他吊轨式巡检机器人过来,避免发生不同运行轨道上的吊轨式巡检机器人碰撞;
(3)设置多个加强筋和承重架,确保导轨转换装置稳固,不容易收到破坏。
附图说明
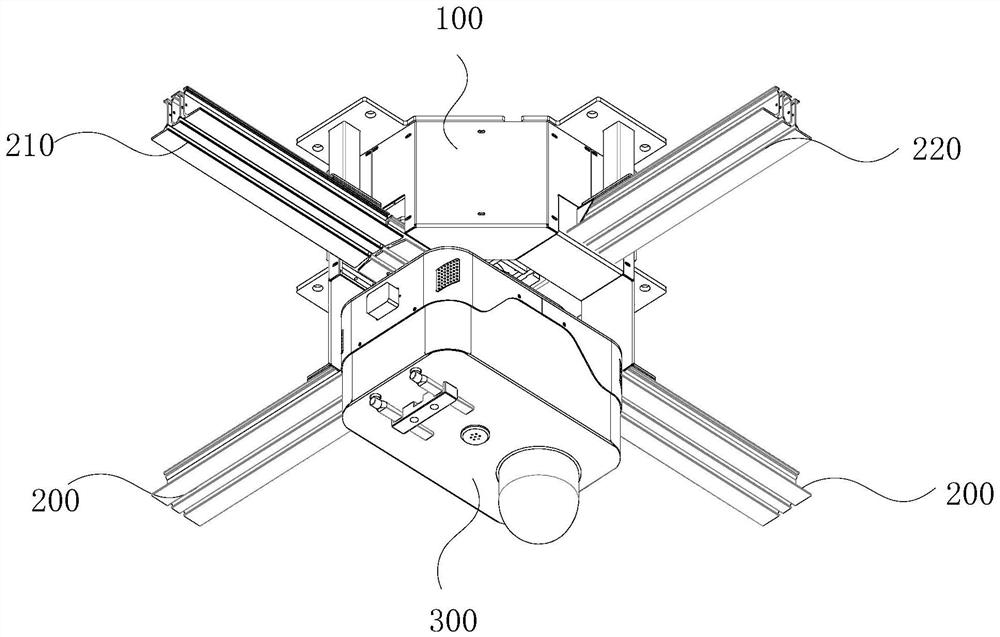
图1为本发明实施例一提供的一种导轨转换装置和运行导轨、吊轨式巡检机器人的配合示意图。
图2为导轨转换装置示意图。
图3为旋转机构结构示意图。
图4为旋转机构、驱动装置和运行导轨配合的示意图。
图5为旋转机构的示意图。
图6为旋转架和输出轴的配合示意图。
图7为输出轴的示意图。
图8为导轨转换装置的模块示意图。
附图标记说明:
100-导轨转换装置;110-旋转机构;111-旋转导轨;111a-旋转底板;111b-凹槽;111c-承重支架;111d-第二加强筋;112-旋转架;112a-防撞块;120-驱动装置;121-输出轴;121a-底座;121b-第一加强筋;130-控制模块;140-感应模块;200-运行导轨;210-第一运行导轨;220-第二运行导轨;300-吊轨式巡检机器人。
具体实施方式
为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
实施例一:
在一个具体的实施例中,一种导轨转换装置100,参见图1-3,为一种导轨转换装置和运行导轨、吊轨式巡检机器人的配合示意图。导轨转换装置100与至少两个运行导轨200配合,导轨转换装置100包括:旋转机构110,旋转机构110和至少两个运行导轨200相配合;驱动装置120,驱动装置120和旋转机构110相连,并用于驱动旋转机构110在第一位置和第二位置之间切换;其中,至少两个运行导轨200包括第一运行导轨210和第二运行导轨220,旋转机构110在第一位置与第一运行导轨210对接,并在第二位置与第二运行导轨220对接。
在本实施例中,导轨转换装置100用于吊轨式巡检机器人300在运行导轨200上运行时的方向转换。吊轨式巡检机器人300在运行导轨200上运行,吊轨式巡检机器人300在导轨转换装置100上能够实现运行方向的改变。运行导轨200和导轨转换装置100能够完全对接,对接后,吊轨式巡检机器人300能够从运行导轨200上运行到导轨转换装置上。
进一步的,旋转机构110是导轨转换装置100中的主要旋转部件,通过旋转机构110和运行导轨200相配合,实现吊轨式巡检机器人300从运行导轨200运行到导轨转换装置上。驱动装置120和旋转机构110相连接,驱动装置驱动旋转机构110旋转。吊轨式巡检机器人300运行到导轨转换机构上后,驱动装置120驱动旋转机构110旋转,旋转机构110带动吊轨式巡检机器人300旋转,实现吊轨式巡检机器人300方向的转换。
可以理解的,运行导轨200可以有多个,且多个运行导轨200之间的延伸方向均不同,参见图1,本实施例给出两个运行导轨,分别为第一运行导轨210和第二运行导轨220,第一运行导轨210和第二运行导轨220的延伸方向之间存在夹角,每个运行导轨上吊轨式巡检机器人300的运行方向均不同。旋转机构110旋转到第一位置时能够和第一运行导轨210对接,旋转机构110旋转到第二位置时能够和第二运行导轨对接。
实施例二:
在一个具体的实施例中,参见图1-2,旋转机构110包括:旋转导轨111;至少一个旋转架112,至少一个旋转架112和旋转导轨111连接;其中,旋转导轨111在第一位置与第一运行导轨210对接,并在第二位置与第二运行导轨220对接;至少一个旋转架112在第一位置与第二运行导轨220对接,并在第二位置与第一运行导轨210对接。
在本实施例中,旋转导轨111和运行导轨200的外形类似,轨道能够完全对接上,吊轨式巡检机器人300能够在旋转轨道111上运行。旋转架112和旋转导轨111连接,并且旋转架112和旋转导轨111连接有一定角度,旋转架112能够对旋转导轨111起到一定的支撑作用。
实施例三:
在一个具体的实施例中,参见图4,旋转导轨111包括:旋转底板111a,旋转底板111a和旋转导轨111贴合连接。
在本实施例中,旋转底板111a为长方形底板,宽度和旋转导轨111的宽度相同,也可以比旋转导轨111的宽度大。旋转导轨111和旋转底板111a通过接触面贴合连接。其中,旋转底板111a上设有分布均匀的孔,旋转导轨111上也设有分布均匀的孔,旋转底板111a和旋转导轨111贴合连接时,孔之间相对,通过螺钉紧固在一起。
进一步的,旋转底板111a和旋转导轨111通过接触面贴合连接,增大了两者的接触面积,使连接更加紧密安全,不易脱落。
实施例四:
在一个具体的实施例中,参见图4,至少一个旋转架112包括:防撞块112a,防撞块112a设于旋转架112上,且位于与至少两个运行导轨200相配合的一端。
在本实施例中,根据上述第一实施例所述,当旋转导轨111和任意一运行导轨200配合时,旋转架112和另一运行导轨200相配合。在旋转架112和运行导轨200配合的一端设有防撞块112a能够防止其他运行导轨200上也有吊轨式巡检机器人300行驶过来和旋转导轨111上的吊轨式巡检机器人300相撞。
实施例五:
在一个具体的实施例中,参见图3,驱动装置120包括:输出轴121,输出轴121的周侧设有至少一个第一加强筋121b,至少一个第一加强筋121b将输出轴121的周侧包围,至少一个第一加强筋121b和输出轴121连接。
在本实施例中,驱动装置120和旋转机构110相连,驱动装置120通过输出轴121和旋转机构110相连接。输出轴121和旋转机构110相连接的一端,周侧设有至少一个加强筋121b能够让输出轴121带动旋转机构110旋转时更加稳固。
实施例六:
在一个具体的实施例中,参见图6,输出轴121的轴端面设有底座121a,旋转底板111a中部设有凹槽111b,凹槽111b和底座121a配合固定。
在本实施例中,输出轴121通过旋转底板111a和旋转机构110相连接。旋转底板111a设有的凹槽111b和输出轴121上的底座121a相配合,底座121a能够刚好卡在凹槽111b上。底座121a比输出轴121的轴直径大,凹槽111b和轴直径大小相同。输出轴121能够刚好从凹槽111b内穿过,但输出轴121上的底座121a比凹槽111b大,不能从凹槽111b内穿过,所以底座121a和凹槽111b配合,能够将旋转底板111a卡在输出轴121上。通过底座121a和凹槽111b相互配合,能够更好的将输出轴121和旋转机构110固定在一起。
实施例七:
在一个具体的实施例中,参见图5,至少一个旋转架112的一端和至少一个第一加强筋121b连接。
在本实施例中,旋转架112通过和加强筋121b连接固定在输出轴121上,实现旋转架112跟随输出轴121旋转。输出轴121的周侧设有多个加强筋121b,每个加强筋121b能够连接一个旋转架,从而实现连接多个旋转架。输出轴121通过加强筋121b和旋转架112相连,能够提高两者之间的稳固程度。
实施例八:
在一个具体的实施例中,参见图5,旋转底板111a的底面设有至少两个第二加强筋111d,至少两个第二加强筋111d和至少一个第一加强筋121b连接。
在本实施例中,至少两个第二加强筋111d设在旋转底板111a的中部,并且沿着旋转底板111a的方向延伸。至少两个第二加强筋111d和输出轴121上的至少一个第一加强筋121b相连接,进一步稳固了输出轴121和旋转底板111a之间连接的稳固性。
实施例九:
在一个具体的实施例中,至少两个运行导轨200用于供吊轨式巡检机器人300行走,导轨转换装置100还包括:控制模块130;感应模块140,感应模块140和控制模块130通信连接,感应模块140用于感应吊轨式巡检机器人300位置。
在本实施例中,通过控制模块130实现对导轨转换装置100的控制。通过感应模块140实现吊轨式巡检机器人300和导轨转换装置100的配合。
虽然本发明披露如上,但本发明并非限定于此。任何本领域技术人员,在不脱离本发明的精神和范围内,均可作各种更动与修改,因此本发明的保护范围应当以权利要求所限定的范围为准。
实施例十:
在一个具体的实施例中,一种导轨转换装置的控制方法,包括:在吊轨式巡检机器人沿至少两个运行导轨中的任一轨道向导轨转换装置行走的情况下,控制驱动装置驱动旋转机构在第一位置和第二位置之前切换,以使得旋转机构与任一轨道对接。
在本实施例中,吊轨式巡检机器人300在任一运行导轨200上向导轨转换装置100运行,并且,吊轨式巡检机器人300向导轨转换装置100发送换轨信号。
导轨转换装置100上的感应模块140接收到吊轨式巡检机器人300的换轨信号后,控制模块130控制驱动装置120带动旋转机构110转动,使旋转导轨111和吊轨式巡检机器人300所在的运行导轨200相配合。
导轨转换装置100和运行导轨200配合好后吊轨式巡检机器人300运行到导轨转换装置100上停止,吊轨式巡检机器人300跟随导轨转换装置100转动从而改变运行方向。控制模块130控制驱动装置120带动旋转机构110转动,导轨转换装置100上的吊轨式巡检机器人300跟随转动。旋转导轨111和另一方向上的运行导轨200相配合,配合好后,吊轨式巡检机器人300继续运行,实现方向转换。
虽然本发明披露如上,但本发明并非限定于此。任何本领域技术人员,在不脱离本发明的精神和范围内,均可作各种更动与修改,因此本发明的保护范围应当以权利要求所限定的范围为准。
- 一种用于吊轨式巡检机器人的导轨转换装置和方法
- 一种锁紧装置、吊轨式巡检机器人导轨和导轨锁紧方法