易受伤害道路使用者认知消息的生成和传送
文献发布时间:2023-06-19 19:07:35
相关申请
本申请要求2020年5月4日提交的美国临时申请第63/019,903号(AC9632-Z)、2020年5月4日提交的美国临时申请第No.63/019,911号(AC9208-Z)和2020年6月2日提交的美国临时申请第63/033,576号(AD0302-Z)的优先权,这些临时申请中的每一临时申请的内容通过引用以其整体合并于此。
技术领域
本文中所描述的实施例总体上涉及边缘计算、网络通信和通信系统实现方式,并且具体涉及连接的和计算机辅助(computer-assisted,CA)/自主驾驶(autonomousdriving,AD)交通工具、车联网(Internet of Vehicles,IoV)、物联网(Internet ofThings,IoT)技术以及智能运输系统。
背景技术
智能运输系统(Intelligent Transport System,ITS)包括与实现交通安全性和效率的提高以及减少排放和燃料消耗的不同运输和交通模式有关的高级应用和服务。可将各种形式的无线通信和/或无线电接入技术(Radio Access Technology,RAT)用于ITS。这些RAT可能需要在一个或多个通信信道中共存,该一个或多个通信信道诸如在5.9千兆赫兹(GHz)频带中可用的那些信道。
已经开发了协作式智能运输系统(Cooperative Intelligent TransportSystem,C-ITS)以实现交通安全性和效率的提高并减少排放和燃料消耗。C-ITS最初的焦点在于道路交通安全性,并且尤其在于交通工具安全性。最近正在努力提高易受伤害道路使用者(vulnerable road user,VRU)的交通安全性和效率,VRU是指物理实体(例如,行人)和/或物理实体使用的用户设备(例如,移动站等)两者。关于两轮或三轮车和四轮车的批准和市场监督的欧洲议会和理事会2013年1月15日(EU)第168/2013号条例(“欧盟第168/2013号条例”)提供了VRU的各种示例。计算机辅助和/或自主驾驶(AD)交通工具(“CA/AD交通工具”)预期通过消除或减少操作交通工具时的人为错误来减少与VRU有关的伤亡。然而,到目前为止,即便CA/AD交通工具装配有复杂的感测技术套件以及计算和绘图技术,它在检测方面能做的也非常少,更不用说纠正VRU端处的人为错误。
附图说明
在附图中(这些附图不一定是按比例绘制的),同样的数字可描述不同视图中的类似组件。具有不同的字母后缀的同样的数字可表示类似组件的不同实例。在所附附图中图示出描述,但不限于此,其中:
图1图示操作布置。图2示出示例ITS-S参考体系结构。图3描绘示例VRU基本服务(VRU basic service,VBS)功能模型。图4示出VBS状态机。图5示出VAM格式结构。图6描绘了交通工具系统中的交通工具ITS站(vehicle ITS station,V-ITS-S)。图7描绘了可被用作VRU ITS-S的个人ITS站(personal ITS station,P-ITS-S)。图8描绘了路边基础设施节点中的路边ITS-S。
图9图示可升级交通工具计算系统(Upgradeable Vehicular Compute System,UVCS)接口。图10图示使用UVCS接口形成的UVCS。图11图示利用UVCS形成的车载系统的软件组件视图。图12描绘了(一个或多个)边缘计算系统中的各种计算节点的组件。
具体实施方式
以下具体实施方式参考了所附附图。可在不同附图中使用相同的附图标记来标识相同的或类似的元素。在以下描述中,出于解释而非限制的目的,阐述了诸如特定结构、体系结构、接口、技术等的具体细节,以提供透彻理解。
随时间推移,交通工具的操作和控制正变得更加自主,并且在未来,大多数交通工具将可能变成完全自主的。包括某种形式的自主性或以其他方式辅助人类操作者的交通工具可被称为“计算机辅助或自主驾驶”交通工具。计算机辅助或自主驾驶(Computer-assisted or autonomous driving,CA/AD)交通工具可包括人工智能(ArtificialIntelligence,AI)、机器学习(machine learning,ML)、和/或用于实现自主操作的其他类似的自学习系统。典型地,这些系统感知其环境(例如,使用传感器数据)并执行各种动作以使成功的交通工具操作的可能性最大化。
交通工具对外界(Vehicle-to-Everything,V2X)应用(被简称为“V2X”)包括以下通信类型:交通工具对交通工具(Vehicle-to-Vehicle,V2V)、交通工具对基础设施(Vehicle-to-Infrastructure,V2I)和/或基础设施对交通工具(Infrastructure-to-Vehicle,I2V)、交通工具对网络(Vehicle-to-Network,V2N)和/或网络对交通工具(network-to-vehicle,N2V)、交通工具对行人通信(Vehicle-to-Pedestrian,V2P)、以及ITS站(ITS station,ITS-S)对ITS-S通信(X2X)。V2X可以使用协作认知来为终端用户提供更智能的服务。这意味着诸如交通工具站或交通工具用户装备(vehicle user equipment,vUE)之类的实体(包括诸如CA/AD交通工具、路边基础设施或路边单元(roadside unit,RSU)、应用服务器、以及行人设备(例如,智能电话、平板等))收集其本地环境的知识(例如,接收自附近的其他交通工具或传感器装备的信息)以处理并共享该知识,以便提供用于碰撞警告系统、自主驾驶等等的更加智能的服务(诸如协作感知、操纵协调等等)。
一个此类V2X应用包括智能运输系统(Intelligent Transport System,ITS),ITS系统是用于利用信息和通信技术来支持对商品和人类的运输以便高效且安全地使用运输基础设施和运输装置(例如,汽车、火车、飞行器、船只等)的系统。既在国际级别又在区域级别,在各种标准化组织中对ITS的要素进行标准化。
ITS中的通信(Communications in ITS,ITSC)可利用各种现有的和新的接入技术(或无线电接入技术(RAT))和ITS应用。这些V2X RAT的示例包括电气和电子工程师协会(Institute of Electrical and Electronics Engineers,IEEE)RAT和第三代合作伙伴(Third Generation Partnership,3GPP)RAT。IEEE V2X RAT包括例如,交通工具环境中的无线接入(Wireless Access in Vehicular Environment,WAVE)、专用短程通信(Dedicated Short Range Communication,DSRC)、5GHz频带中的智能运输系统(ITS-G5)、IEEE 802.11p协议(其为WAVE、DSRC和ITS-G5的层1(layer 1,L1)和层2(layer 2,L2)部分),并且有时包括被称为全球微波接入互操作性(Worldwide Interoperability forMicrowave Access,WiMAX)的IEEE 802.16协议。术语“DSRC”是指在美国一般使用的5.9GHz频带中的交通工具通信,而“ITS-G5”是指在欧洲的5.9GHz频带中的交通工具通信。由于可在任何地理或政治区域中使用的任何数量的不同RAT(包括基于IEEE 802.11p的RAT)是可适用的,因此贯穿本公开可以可互换地使用术语“DSRC”(在美国等区域中使用)和“ITS-G5”(在欧洲等区域中使用)。3GPP V2X RAT包括例如,使用长期演进(Long Term Evolution,LTE)技术的蜂窝V2X(cellular V2X,C-V2X)(有时被称为“LTE-V2X”)和/或使用第五代(Fifth Generation,5G)技术的蜂窝V2X(C-V2X)(有时被称为“5G-V2X”或“NR-V2X”)。可将其他RAT用于ITS和/或V2X应用,这些RAT诸如使用UHF和VHF频率、全球移动通信系统(Global System for Mobile Communication,GSM)和/或其他无线通信技术的RAT。
1.易受伤害道路使用者(VULNERABLE ROAD USER,VRU)
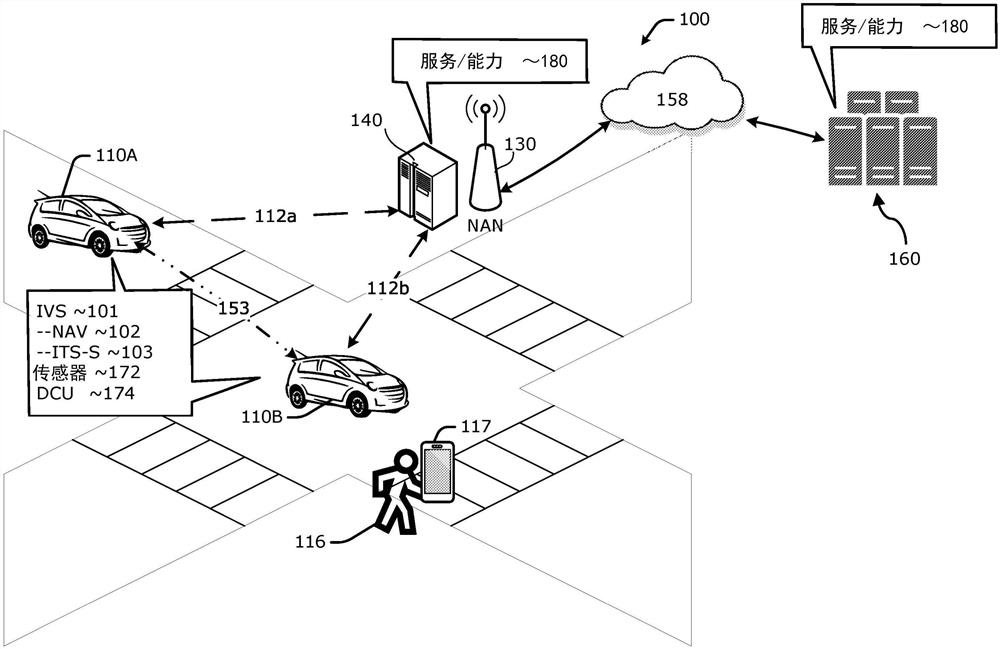
图1图示出环境100的概览。如所示,该环境包括交通工具110A和110B(统称为“交通工具110”)。交通工具110包括引擎、变速器、轴、轮等等(未示出)。交通工具110可以是用于运输人员或物品的任何类型的机动化交通工具,其中每一者装配有引擎、变速器、轴、轮以及用于驾驶、驻停、乘客舒适性和/或安全性等的控制系统等。本文中所使用的术语“电机”、“机动化”等是指将一种形式的能量转化为机械能的设备,并且包括内燃机(internalcombustion engine,ICE)、压缩内燃机(compression combustion engine,CCE)、电动机、和混合动力(例如,包括ICE/CCE和(一个或多个)电动机)。由图1示出的多个交通工具110可表示具有不同品牌、型号、装饰等的机动交通工具。
出于说明性目的,针对包括处于2D高速公路/公路/道路环境中的交通工具110的部署场景提供以下描述,其中交通工具110是汽车。然而,还可以适用于其他类型的交通工具,这些其他类型的交通工具诸如卡车、公共汽车、摩托艇、摩托车、电动客运工具和/或能够运输人员或物品的任何其他机动化设备。此外,可适用于不同交通工具类型的交通工具之间的社交网络和其中交通工具110中的一些或全部被实现为飞行对象(诸如飞行器、无人机、UAV)的3D部署场景,和/或可适用于任何其他类似的机动化设备。
交通工具110包括车载系统(IVS)101,下文将对其进行更详细的讨论。然而,交通工具110可以包括附加或替代类型的计算设备/系统,诸如智能电话、平板、可穿戴设备、膝上型设备、膝上型电脑、车载信息娱乐系统、车载娱乐系统、仪表盘、抬头显示器(head-updisplay,HUD)设备、机载诊断设备、仪表台移动装备、移动数据终端、电子引擎管理系统、电子/引擎控制单元、电子/引擎控制模块、嵌入式系统、微控制器、控制模块、引擎管理系统、以及可操作的类似计算设备/系统。包括计算系统(例如,IVS 101)的交通工具110以及贯穿本公开所引用的交通工具可指交通工具用户装备(vUE)110、交通工具站110、交通工具ITS站(V-ITS-S)110、计算机辅助(CA)/自主驾驶(AD)交通工具110等等。
每个交通工具110包括车载系统(IVS)101、一个或多个传感器172、以及一个或多个驾驶控制单元(driving control unit,DCU)174。IVS 100包括数个交通工具计算硬件子系统和/或应用,包括例如用于实现图2的ITS体系结构的各种硬件和软件元件。交通工具110可采用一个或多个V2X RAT,这允许交通工具110直接彼此通信以及与基础设施装备(例如,网络接入节点(network access node,NAN)130)通信。V2X RAT可指3GPP蜂窝V2X RAT(例如,LTE、5G/NR及以后的)、WLAN V2X(W-V2X)RAT(例如,美国的DSRC或欧盟的ITS-G5)和/或某种其他RAT(诸如本文中所讨论的那些)。交通工具110中的一些或全部包括用于(粗略地)确定其相应的地理位置并以安全且可靠的方式与NAN 130传递其当前位置的定位电路。这允许交通工具110彼此和/或与NAN 130同步。附加地,交通工具110中的一些或全部可以是计算机辅助或自主驾驶(CA/AD)交通工具,其可包括用于辅助交通工具操作的人工智能(AI)和/或机器人。
IVS 101包括可能与图6中的ITS-S 601相同或类似的ITS-S 103。IVS 101可以是,或者可以包括可升级交通工具计算系统(UVCS),诸如下文讨论的那些系统。如本文所讨论,ITS-S 103(或ITS-S 103在其上操作的底层V2X RAT电路)能够执行信道侦听或介质侦听操作,这至少利用能量检测(energy detection,ED)来确定信道上存在或不存在其他信号以确定信道是被占用的还是清空的。ED可包括:感测跨预期传送频带、频谱或信道的射频(radiofrequency,RF)能量达一段时间,并将感测到的RF能量与预定义或所配置的阈值进行比较。当感测到的RF能量高于阈值时,预期传送频带、频谱或信道可被认为是被占用的。
除了本公开的UVCS技术之外,IVS 101和CA/AD交通工具110以其他方式可以是数个车载系统和/或CA/AD交通工具中的任一者,从计算机辅助交通工具到部分或完全自主交通工具。附加地,IVS 101和CA/AD交通工具110可包括图1未示出的其他组件/子系统,诸如贯穿本公开示出和描述的元件。将参考其余图2-图8进一步描述用于实现IVS 101的底层UVCS技术的这些和其他方面。
除了本文中所讨论的功能之外,ITS-S 601(或ITS-S 601在其上操作的底层V2XRAT电路)还能够测量各种信号或确定/标识各种信号/信道特性。可出于蜂窝小区选择、切换、网络附接、测试和/或其他目的来执行信号测量。由ITS-S 601(或V2X RAT电路)收集的测量/特性可包括以下各项中的一项或多项:带宽(bandwidth,BW)、网络或蜂窝小区负载、等待时间、抖动、往返时间(round trip time,RTT)、中断数量、数据分组的乱序递送、传送功率、比特错误率、比特错误比(bit error ratio,BER)、块错误率(Block Error Rate,BLER)、分组丢失率(packet loss rate,PLR)、分组接收率(packet reception rate,PRR)、信道繁忙率(Channel Busy Ratio,CBR)、信道占用率(Channel occupancy Ratio,CR)、信噪比(signal-to-noise ratio,SNR)、信噪比和干扰比(signal-to-noise andinterference ratio,SINR)、信号加噪声加失真与信号加失真(signal-plus-noise-plus-distortion to noise-plus-distortion,SINAD)比率、峰均功率比(peak-to-averagepower ratio,PAPR)、参考信号接收功率(Reference Signal Received Power,RSRP)、接收信号强度指标(Received Signal Strength Indicator,RSSI)、参考信号接收质量(Reference Signal Received Quality,RSRQ)、用于E-UTRAN或5G/NR的UE定位的蜂窝小区帧的GNSS定时(例如,NAN 130参考时间与针对给定GNSS的GNSS特定参考时间之间的定时)、GNSS编码测量(例如,第i个GNSS卫星信号的扩频码的GNSS编码相位(整数和小数部分))、GNSS载波相位测量(例如,自锁定至该信号以来测得的第i个GNSS卫星信号的载波相位周期数(整数和小数部分);也称为累积三角范围(Accumulated Delta Range,ADR))、信道干扰测量、热噪声功率测量、接收干扰功率测量、和/或其他类似测量。RSRP、RSSI和/或RSRQ测量可包括对用于3GPP网络(例如,LTE或5G/NR)的蜂窝小区特定参考信号、信道状态信息参考信号(channel state information reference signal,CSI-RS)和/或同步化信号(synchronization signal,SS)或SS块的RSRP、RSSI和/或RSRQ测量,以及对用于IEEE802.11WLAN/WiFi网络的各种信标、FILS发现帧、或探查响应帧的RSRP、RSSI和/或RSRQ测量。可附加地或替代地使用其他测量,诸如在以下各项中讨论的那些测量:3GPP TS 36.214版本15.4.0(2019年9月)、3GPP TS 38.215版本16.1.0(2020年4月)、IEEE 802.11的部分11:“Wireless LAN Medium Access Control(MAC)and Physical Layer(PHY)specifications,IEEE Std(无线LAN介质访问控制(Medium Access Control,MAC)和物理层(Physical,PHY)规范,IEEE标准)”,等等。NAN 130可测量或收集相同或类似的测量。
子系统/应用还可包括仪表盘子系统、前排座位和/或后排座位信息娱乐子系统和/或其他类似的媒体子系统、导航子系统(navigation,NAV)102、交通工具状态子系统/应用、HUD子系统、EMA子系统等等。NAV 102可以可被配置或可操作用于取决于交通工具110是计算机辅助交通工具、部分自主驾驶交通工具还是完全自主驾驶交通工具来提供导航引导或控制。NAV 102可被配置有计算机视觉,该计算机视觉用于在交通工具110在去往其目的地的途中行进时,识别交通工具110周围的区域中的静止或移动对象(诸如,行人、另一交通工具或某个其他移动对象)。NAV 102可以可被配置成用于或可以可操作用于识别交通工具110周围区域中的静止或移动对象,并且作为响应,至少部分地基于由传感器172收集的传感器数据,在引导或控制交通工具110的DCU时做出其决策。
DCU 174包括控制交通工具110的各种系统(诸如,引擎、变速器、转向器、制动器等的操作)的硬件元件。DCU 174是控制交通工具110的相对应系统的嵌入式系统或其他类似计算机设备。DCU 174可各自具有与下文讨论的图12的设备/系统的组件相同或类似的组件,或者可以是某种其他合适的微控制器或其他类似的处理器设备、(一个或多个)存储器设备、通信接口等等。各个DCU 174能够与一个或多个传感器172和致动器(例如,图12的致动器1274)通信。传感器172是可被配置或可操作用于检测交通工具110周围的环境和/或该环境的改变的硬件元件。传感器172可被配置或可操作用于向DCU 174和/或一个或多个AI代理提供各种传感器数据,以使得DCU 174和/或一个或多个AI代理能够控制交通工具110的相应的控制系统。传感器172中的一些或全部可与图12的传感器电路1272相同或类似。IVS 101可包括或实现设施层,并操作该设施层内的一个或多个设施。
IVS 101自身或响应于用户交互而经由接口153与一个或多个交通工具110通信或交互,接口153可以是例如基于3GPP的直接链路或基于IEEE的直接链路。3GPP(例如,LTE或5G/NR)直接链路可以是侧链路、接近度服务(Proximity Service,ProSe)链路和/或PC5接口/链路,基于IEEE(WiFi)的直接链路或基于个域网(personal area network,PAN)的链路可以是例如WiFi直接链路、IEEE 802.11p链路、IEEE 802.11bd链路、IEEE 802.15.4链路(例如,ZigBee、低功率无线个域网上的IPv6(IPv6 over Low power Wireless PersonalArea Network,6LoWPAN)、WirelessHART(无线HART)、MiWi、Thread等)。可以使用诸如蓝牙或蓝牙低能量(Bluetooth Low Energy,BLE)等等之类的其他技术。交通工具110可通过接口153彼此交换ITS协议数据单元(protocol data unit,PDU)或其他消息。
IVS 101自身或响应于用户交互而通过接口112或通过网络158经由NAN 130与一个或多个远程/云服务器160通信或交互。NAN 130被布置成用于经由该NAN 130与各个交通工具110之间相应的接口112向交通工具110提供网络连接性。NAN 130是或包括ITS-S,并且可以是路边ITS-S(roadside ITS-S,R-ITS-S)。NAN 130是作为接入网络中向终端用户设备(例如,V-ITS-S 110和/或VRU ITS-S 117)提供网络连接性的部分的网络元件。接入网络可以是无线电接入网络(RAN),诸如对于在5G/NR蜂窝网络中操作的RAN,NG RAN或5G RAN;对于在LTE或4G蜂窝网络中操作的RAN,E-UTRAN;或对于GSM或CDMA蜂窝网络,诸如UTRAN或GERAN之类的传统RAN。对于WiMAX实现方式,接入网络或RAN可被称为接入服务网络。在一些实现方式中,RAN的全部或部分可被实现为在服务器计算机上运行的、作为虚拟网络的部分的一个或多个软件实体,其可被称为云RAN(Cloud RAN,CRAN)、感知无线电(CognitiveRadio,CR)、虚拟基带单元池(virtual baseband unit pool,vBBUP),等等。CRAN、CR或vBBUP可实现RAN功能拆分,其中一个或多个通信协议层由CRAN/CR/vBBUP操作并且其他通信协议实体由各个RAN节点130操作。该虚拟化框架允许释放NAN 130的处理器核心来执行其他虚拟化的应用,诸如用于如本文所讨论的VRU 116和/或V-ITS-S110的虚拟化的应用。
环境100还包括VRU 116,该VRU 116包括VRU ITS-S 117。VRU 116是非机动化道路使用者以及L类交通工具(例如,轻便摩托车、摩托车、赛格威等),如在EU第168/2013号条例的附件I中所定义(参见例如,国际标准化组织(ISO)D.,“Road vehicles–Vehicledynamics and road-holding ability–Vocabulary(道路交通工具——交通工具动力学和道路保持能力——词汇表)”,ISO 8855(2013年)(此后称为“[ISO-8855]”))。在给定用例和行为场景中,VRU 116是与VRU系统117交互的行为方。例如,如果VRU 116装配有个人设备,则VRU 116可以经由该个人设备而与其他ITS站和/或具有VRU设备117的其他VRU 116直接交互。VRU ITS-S 117可以是行人型VRU(参见例如图7的P-ITS-S 701)或交通工具型(例如,自行车、摩托车上的)VRU。本文中所使用的术语“VRU ITS-S”是指任何类型的VRU设备或VRU系统。在潜在的VRU 116甚至可以被标识为VRU 116之前,其可被称为非VRU并被认为在ITS中处于空闲状态或非活跃状态。
如果VRU 116并未装配有设备,则VRU 116间接地交互,这是因为该VRU 116由VRU系统117中的另一ITS站经由其感测设备(诸如传感器和/或其他组件)来检测。然而,此类VRU 116无法检测其他VRU 116(例如,自行车)。在ETSI TS 103 300-2版本0.3.0(2019年12月)(“[TS103300-2]”)中,不同类型的VRU 116被归类为以下四个简档:
·VRU简档-1:行人(人行道使用者、儿童、婴儿车、残疾人、老年人等)
·VRU简档-2:骑自行车者(载人的轻型交通工具、轮椅使用者、骑马的人、滑行者、电子滑板车、赛格威等);以及
·VRU简档-3:骑摩托车者(摩托车、有动力两轮车、轻便摩托车等);
·VRU简档-4:对其他道路使用者构成安全性风险的动物(狗、野生动物、马、牛、羊等)。
这些简档进一步定义VRU ITS-S 117的VRU功能系统和通信体系结构。为了有力地支持VRU简档认知启用,下文将更详细地讨论VRU相关的功能系统要求、协议和消息交换机制(例如,VAM)。附加地,可适用的VRU设备类型在表1中(也参见例如[TS103300-2])被列出。
表1
VRU 116可以装配有便携式设备(例如,设备117)。除非上下文另有指示,否则术语“VRU”可用于指代VRU 116及其VRU设备117两者。VRU设备117可在最初被设置并且可在其操作期间遵循需要被指定的情境改变而演变。这对于可以在通电时自动地实现的或经由HMI实现的对VRU简档和VRU类型的设置而言尤其成立。道路使用者的易损性状态的改变也需要被提供,从而在道路使用者变得易受伤害时激活VRU基本服务,或者在道路使用者进入受保护区域时停用该VRU基本服务。初始配置可以在设备上电时自动地设置。这可以是针对VRU装备类型的情况,该VRU装备类型可以是:VRU-Tx,仅具有对消息进行广播的通信能力并且符合信道拥塞控制规则;VRU-Rx,仅具有对消息进行接收的通信能力;和/或VRU-St,具有完整的双工通信能力。在操作期间,VRU简档也可由于某种聚类或拆解而改变。因此,VRU设备角色将能够根据VRU简档改变而演变。
“VRU系统”(例如,VRU ITS-S 117)包括对于VRU用例和场景(如本文讨论的那些)相关的ITS人工制品,这些VRU用例和场景包括主要组件及其配置、行为方及其装备、相关交通情形和操作环境。术语“VRU设备”、“VRU装备”和“VRU系统”是指由集成ITS-S技术的VRU116使用的便携式设备(例如,移动站,诸如智能电话、平板、可穿戴设备、健身追踪器等)或IoT设备(例如,交通控制设备),并且由此,VRU ITS-S 117可包括或指代“VRU设备”、“VRU装备”和/或“VRU系统”。
本公开中考虑的VRU系统是包括至少一个易受伤害道路使用者(VRU)和具有VRU应用的一个ITS站的协作式智能运输系统(C-ITS)。ITS-S可以是基于由较低通信层(设施层、联网和传输层以及接入层(参见例如,ETSI EN 302 665版本1.1.1(2010年9月)(“[EN302665]”))、有关的硬件组件、其他站内服务和传感器子系统提供的服务来处理VRU应用逻辑的交通工具ITS-站或路边ITS-站。VRU系统可扩展为具有在场景中涉及的其他VRU、其他ITS-S和其他道路使用者,诸如交通工具、摩托车、自行车和行人。VRU可装配有ITS-S或装配有使其能够发送或接收警报的不同技术(例如,IoT)。由此,所考虑的VRU系统是异构系统。使用VRU系统的定义来标识主动地参与用例和行为场景的系统组件。主动的系统组件装配有ITS站,而所有其他组件是被动的并且形成VRU系统的环境的部分。
VRU ITS-S 117可操作一个或多个VRU应用。VRU应用是扩展对其他交通参与方中或周围的VRU和/或VRU集群的认知或关于该VRU和/或VRU集群的认知的应用。VRU应用可以存在于任何ITS-S中,意味着VRU应用可以在VRU自身之中或在非VRU ITS站(例如,汽车、卡车、公共汽车、路边站或中央站)中被发现。这些应用旨在直接向行为方(诸如人类)或向自动化系统提供VRU相关信息。VRU应用可以增加对易受伤害的道路使用者的认知,向任何其他道路使用者提供VRU碰撞风险警报或在交通工具中触发自动化动作。VRU应用利用经由C-ITS网络从其他ITS-S接收到的数据,并且使用由ITS-S自身的传感器系统和其他集成的服务提供的附加信息。
一般而言,存在四种类型的VRU装备117,包括:非装配的VRU(例如,不具有设备的VRU 116);VRU-Tx(例如,装配有ITS-S 117的VRU 116,该ITS-S 117仅具有广播与VRU 116有关的认知消息或信标的传送(Tx)能力而不具有接收(Rx)能力);VRU-Rx(例如,装配有ITS-S 117的VRU 116,该ITS-S 117仅具有接收与其他VRU 116或其他非VRU ITS-S有关的所广播的认知消息或信标的Rx能力(但不具有Tx能力);以及VRU-St(例如,装配有包括VRU-Tx和VRU-Rx功能的ITS-S 117的VRU 116)。用例和行为场景基于VRU 116的装备以及存在或不存在具有VRU应用的V-ITS-S 110和/或R-ITS-S 130来考虑VRU系统117的宽泛的配置集合。ETSI TR 103 300-1版本2.1.1(2019年9月)(“[TR103300-1]”)的表2示出了各种VRU系统配置的示例。
针对VRU 116/117指定的消息是VRU认知消息(VRU awareness message,VAM)。VAM是从VRU ITS 117传送的、用于创建并维护对参与VRU/ITS系统的VRU 116的认知的消息。VAM在最大程度上与[EN302637-2]中定义的现有的协作认知消息(Cooperative AwarenessMessage,CAM)相调和。VAM的传送限于[TS103300-2]的第6.1款中指定的VRU简档。VAM包含取决于VRU简档和实际的环境状况的所有要求的信息。VAM中的数据元素应如表2中所描述。
表2:VAM数据元素
VRU系统117支持对消息的灵活且动态的触发,其中生成间隔从最频繁时的X毫秒(ms)起,其中X是数字(例如,X=100ms)。VAM频率与如[TS103300-3]第6.5.10.5款所讨论的VRU运动动力学和所选择的碰撞风险度量相关。
在给定区域内操作的VRU 116的数量可能非常高。在一些情况下,VRU 116可与VRU交通工具(例如,骑自行车的骑手等)组合。为了减少通信量和相关联资源使用(例如,频谱需求),VRU 116可被分组到一个或多个VRU集群中。VRU集群是两个或更多个VRU 116(例如,行人)的集合,使得VRU 116以一致的方式移动,例如,以一致的速度或方向并在VRU边界框内移动。“一致的集群速度”指使得集群中任何VRU之间的速度和航向差低于预定义阈值的、集群中VRU 116的速度范围。“VRU边界框”是这样的一个矩形区域:它包含VRU集群中的所有VRU 116,使得边界框中的所有VRU与大致相同标高的表面接触。
VRU集群可以是同构的VRU集群(例如,行人群组)或异构的VRU集群(例如,行人和有人工操作的自行车的群组)。这些集群被视为单个对象/实体。VRU集群的参数通过VRU认知消息(VAM)来传递,其中只有集群头持续传送VAM。VAM包含任选字段,该任选字段指示VRU116是否正在领导集群,其对于单独的VRU是不存在的(例如,集群中的其他VRU不应传送VAM,或应以非常长的周期性传送VAM)。领导方VRU还在VAM中指示它是同构集群还是异构集群,异构集群是VRU的任意组合。指示VRU集群是否是异构和/或同构的可以在集群解散时提供与轨迹和行为预测有关的有用信息。
使用自行车或摩托车将显著改变使用该非VRU对象的VRU(或VRU交通工具,诸如“自行车”/“摩托车”)的行为和参数设置。VRU 116和非VRU对象的组合称为“组合的VRU”。具有VRU简档3的VRU 116(例如,骑摩托车者)通常不参与VRU聚类。
VAM包含始发VRU ITS-S 117的状态和属性信息。内容可取决于VRU ITS-S 117的简档而有所不同。典型的状态信息包括时间、位置、运动状态、集群状态等等。典型的属性信息包括关于VRU简档、类型、尺寸等等的数据。VAM的生成、传送和接收由VRU基本服务(VBS)(参见例如图2-图3)管理。VBS是操作VAM协议的设施层实体。VBS提供以下服务:处置VRU角色、发送和接收VAM以增强VRU安全性。在存在高VRU 116/117密度的情况下,VBS还指定和/或管理VRU聚类,以减少VAM通信开销。在VRU聚类中,具有一致的速度和航向的靠近地定位的VRU形成设施层VRU集群,并且仅集群头VRU 116/117传送VAM。集群中的其他VRU 116/117跳过VAM传送。活跃的VRU 116/117(例如,不在VRU集群中的VRU 116/117)发送单独的VAM(被称为单个VRU VAM等)。“单独的VAM”是包括关于单独的VRU 116/117的信息的VAM。不具有资格的VAM可以是集群VAM,也可以是单独的VAM。
由NAN 130、V-ITS-S 110和VRU ITS-S 117采用的无线电接入技术(RAT)可包括允许V-ITS-S 110直接彼此通信、与基础设施装备(例如,NAN 130)通信并且与VRU设备117通信的一个或多个V2X RAT。在图1的示例中,可以使用任何数量的V2X RAT来进行V2X通信。在示例中,可使用至少两个不同的V2X RAT,包括:基于IEEE V2X技术(例如,用于美国的DSRC和用于欧洲的ITS-G5)的WLAN V2X(W-V2X)RAT、和3GPP C-V2X RAT(例如,LTE、5G/NR及之后)。在一个示例中,C-V2X RAT可利用空中接口112a,并且WLAN V2X RAT可利用空中接口112b。用于ITS-G5接口的接入层在ETSI EN 302 663版本1.3.1(2020年1月)(此后称为“[EN302663]”)中概述,并描述了ITS-S参考体系结构200的接入层。ITS-G5接入层包括IEEE802.11-2016(此后称为“[IEEE80211]”)和IEEE 802.2逻辑链路控制(Logical LinkControl,LLC)(此后称为“[IEEE8022]”)协议。用于(一个或多个)基于3GPP LTE-V2X的接口的接入层尤其在ETSI EN 303 613版本1.1.1(2020年1月)、3GPP TS 23.285版本16.2.0(2019年12月)中进行概述;并且3GPP 5G/NR-V2X尤其在3GPP TR 23.786版本16.1.0(2019年6月)和3GPP TS 23.287版本16.2.0(2020年3月)中进行概述。NAN 130或边缘计算节点140可提供一个或多个服务/能力180。
在V2X场景中,V-ITS-S 110或NAN 130可以是或可充当RSU或R-ITS-S 130,RSU或R-ITS-S 130是指用于V2X通信的任何运输基础设施实体。在该示例中,RSU 130可以是静止RSU,诸如gNB/eNB型RSU或其他类似基础设施,或者可以是相对静止的UE。RSU 130可以是可以由交通工具(例如,V-ITS-S 110)、行人或具有此类能力的某种其他设备来实现的移动RSU或UE型RSU。在这些情况下,可以管理移动性问题,以便确保对变换实体进行适当的无线电覆盖。
RSU 130是与位于路边的射频电路耦合的计算设备,该射频电路向经过的V-ITS-S110提供连接性支持。RSU 130还可包括内部数据存储电路,该内部数据存储电路用于存储交叉口地图几何形状、交通统计、媒体、以及用于感测和控制正在进行的交通工具和行人交通的应用/软件。RSU 130提供各种服务/能力180,诸如例如,高速事件(诸如防撞、交通警报等等)所要求的非常低等待时间的通信。附加地或替代地,RSU 130可提供诸如例如蜂窝/WLAN通信服务之类的其他服务/能力180。在一些实现方式中,RSU 130的组件可被封装在适合户外安装的防风雨外壳中,并且可包括网络接口控制器,以提供与交通信号控制器和/或回程网络的有线连接(例如,以太网)。进一步地,RSU 130可包括有线或无线接口,以与其他RSU 130(图1未示出)进行通信。
在布置100中,V-ITS-S 110a可装配有第一V2X RAT通信系统(例如,C-V2X),而V-ITS-S 110b可装配有第二V2X RAT通信系统(例如,W-V2X,其可以是DSRC、ITS-G5等等)。附加地或替代地,V-ITS-S 110a和/或V-ITS-S 110b可各自与一个或多个V2X RAT通信系统一起被采用。RSU 130可提供一个或多个服务/能力180之间的V2X RAT变换服务,以使得各个V-ITS-S 110即便在这些V-ITS-S 110实现不同的V2X RAT时也可彼此通信。RSU 130(或边缘计算节点140)可提供一个或多个服务/能力180之间的VRU服务,其中RSU 130出于VRU安全性目的而与V-ITS-S 110和/或VRU共享CPM、MCM、VAM、DENM、CAM等。V-ITS-S 110还可彼此共享此类消息、与RSU 130共享此类消息、和/或与VRU共享此类消息。这些消息可包括如本文中所讨论的各种数据元素和/或数据字段。
NAN 130可以是静止RSU,诸如gNB/eNB型RSU或其他类似基础设施。NAN 130可以是可以由交通工具、行人或具有此类能力的某种其他设备来实现的移动RSU或UE型RSU。在这些情况下,可以管理移动性问题,以便确保对变换实体进行适当的无线电覆盖。实现连接112的NAN 130可被称为“RAN节点”等。RAN节点130可包括提供地理区域(例如,蜂窝小区)内的覆盖的地面站(例如,陆地接入点)或卫星站。RAN节点130可被实现为诸如宏蜂窝基站和/或低功率基站之类的专用物理设备中的一个或多个,该低功率基站用于提供毫微微蜂窝、微微蜂窝、或相较于宏蜂窝具有较小的覆盖面积、较小的用户容量、或较高的带宽的其他类似蜂窝。在该示例中,RAN节点130被具体化为节点B、演进型节点B(evolved NodeB,eNB)、或下一代节点B(next generation NodeB,gNB)、一个或多个中继节点、分布式单元或路边联合(Road Side Unite,RSU)。可以使用任何其他类型的NAN。附加地,RAN节点130可以实现用于RAN的各种逻辑功能,包括但不限于用于无线电资源管理、准入控制、上行链路和下行链路动态资源分配、无线电承载方管理、数据分组调度等的(一个或多个)RAN功能(例如,无线电网络控制器(radio network controller,RNC)功能和/或NG-RAN功能)。
网络158可表示诸如以下各项的网络:因特网;无线局域网(wireless local areanetwork,WLAN)或无线广域网(wireless wide area network,WWAN),包括公司或组织的专有和/或企业网络;蜂窝核心网络(例如,演进的分组核心(evolved packet core,EPC)网络、下一代分组核心(NextGen Packet Core,NPC)网络、5G核心(5G core,5GC)或某种其他类型的核心网络);提供一个或多个云计算服务的云计算体系结构/平台;和/或其组合。作为示例,网络158和/或接入技术可包括诸如LTE、MuLTEfire和/或NR/5G之类的蜂窝技术(例如,如由无线电接入网络(Radio Access Network,RAN)节点130提供)、WLAN(例如,
远程/云服务器160可表示一个或多个应用服务器、提供云计算服务的云计算体系结构/平台、和/或某种其他远程基础设施。远程/云服务器160可包括数个服务和能力180中的任何一个,诸如例如,ITS相关应用和服务、驾驶辅助(例如,绘图/导航)、内容供应(例如,多媒体信息娱乐流送)等等。
附加地,NAN 130与可向交通工具110提供任何数量的服务/能力180的边缘计算节点140(或边缘计算节点140的集合)共同定位,该服务/能力180诸如ITS服务/应用、驾驶辅助和/或内容供应服务180。边缘计算节点140可包括边缘网络或“边缘云”,或可以是边缘网络或“边缘云”的部分。边缘计算节点140还可被称为“边缘主机140”、“边缘服务器140”或“计算平台140”。边缘计算节点140可对资源(例如,存储器、CPU、GPU、中断控制器、I/O控制器、存储器控制器、总线控制器、网络连接或会话等)进行分区,其中相应的分区操作可包含安全和/或完整性保护能力。缘节点还可通过隔离的用户空间实例(诸如容器、分区、虚拟环境(virtual environment,VE)、虚拟机(virtual machine,VM)、小型服务程序、服务器和/或其他类似的计算抽象)来提供多个应用的编排。边缘计算节点140可被实现在以下各项中:数据中心或云安装;规定的边缘节点服务器、企业服务器、路边服务器、电信中央局;或正在消费边缘服务而被服务的本地或对等边缘处设备。边缘计算节点140可向交通工具110提供任何数量的驾驶辅助和/或内容供应服务180。边缘计算节点140可被实现在以下各项中:数据中心或云安装;规定的边缘节点服务器、企业服务器、路边服务器、电信中央局;或正在消费边缘服务而被服务的本地或对等边缘处设备。可实现边缘计算节点140和/或边缘计算网络/云的此类其他边缘计算/联网技术的示例包括:多接入边缘计算(Multi-AccessEdge Computing,MEC)、内容交付网络(Content Delivery Network,CDN)(也被称为“内容分发网络”,等等);移动性服务提供商(Mobility Service Provider,MSP)边缘计算和/或移动性即服务(Mobility as a Service,MaaS)提供商系统(例如,用于AECC体系结构);星云边缘-云系统;雾计算系统;微云边缘-云系统;移动云计算(Mobile Cloud Computing,MCC)系统;中央局重新体系结构化为数据中心(Central Office Re-architected as aDatacenter,CORD)、移动CORD(mobile CORD,M-CORD)和/或融合的多接入和核心(Converged Multi-Access and Core,COMAC)系统;等等。进一步地,本文中所公开的技术可涉及其他IoT边缘网络系统和配置,并且也可以使用其他中间处理实体和体系结构。
2.VAM开销减少和冗余缓解
VAM的生成、传送和接收由VRU基本服务(VBS)通过实现VAM协议来管理(参见例如[TS103300-3])。VRU基本服务是操作VAM协议的设施层实体。它提供三种主要服务:处置VRU角色、发送和接收VAM以增强VRU安全性。然而,当前标准(参见例如[TS103300-3])不提供VAM生成触发、VAM生成频率、以及在VAM大小变得大于较低层能够处置的大小的情况下进行的VAM分段的细节。频繁地传送VAM可能是期望的,以在附近实现更好的VRU认知,从而改善VRU安全性,但是,它可能会在接入层中产生显著的或不可接受的通信开销。在存在高VRU密度的情况下,VRU聚类概念在[TS103300-3]中被采用,以在一定程度上减少VAM通信开销。在VRU聚类中,具有一致的速度和航向的靠近地定位的VRU形成设施层VRU集群,并且仅集群领导者/集群头传送VAM。然而,集群加入约束限制了在大多数情况下形成集群的场景,导致VRU在接入层处通过相同无线电资源传送单独的VAM。
目前,ETSI ITS工作组1(working group 1,WG1)正在开发VRU基本服务(参见例如,[TS103300-3])协议和过程。VAM散播的细节仍未被定义。在不影响附近的VRU安全性和VRU认知的情况下,需要在由设施层处的VBS进行的VAM生成的频率和大小与接入层处的通信开销之间的平衡。
VAM传送频率基于附近的若干个参数/感知到的情境来动态地调整,以减少VAM通信开销。这公开\实现VAM的高效散播:
·基于其角色和情境的各种交通工具站类型(例如,VRU、RSE、交通工具站等)的VBS激活和停用条件
·由VBS进行的生成频率管理,以实现高效的VAM散播。
ο各种类型的VAM(单VRU VAM、VRU集群VAM和基础设施VAM)的第一次生成和传送的触发事件
ο这些VAM被触发生成和传送之后,连续传送这些VAM的条件和过程
·用于通信开销减少的VAM冗余缓解的机制
·在VAM大小超过较低层可以处置的最大传送单元(maximum transmissionunit,MTU)的情况下的VAM分段算法。
总之,本文的描述实现了高效VAM散播机制,并减少了交通工具网络(包括车联网(Internet of Vehicles,IoV)网络和/或自主无线传感器网络)中的通信开销,从而解决了上述问题/挑战。
在各个实现方式中,ITS-S提供ITS服务,ITS服务涉及ITS服务消息(例如VAM)的传送和接收。ITS服务是跨城市或地理区域容易扩展的。在设施层消息中,应用容器与(一个或多个)ITS PDU头部和/或ITS服务容器一起使用。
此外,ETSI ITS标准/框架和/或边缘计算标准/框架(例如,多接入边缘计算(MEC)等)可以标准化和/或指定本文中所讨论的各个实现方式。在这些实现方式中,一个或多个边缘计算应用(例如,MEC应用)提供VBS并且生成、接收和传送VAM。
2.1VRU基本服务(VBS)激活和终止
如先前提及的,VAM生成、传送和接收由设施层中/处的VRU基本服务(VBS)设施处置。因此,当VRU ITS-S需要传送或接收VAM时,VBS必须是活跃的。以下VBS激活和停用触发器用于不同类型的ITS-S及其当前状态。
2.1.1.VRU ITS-S:
每当VRU处于活跃VRU状态时(诸如,当VRU可能受到来自其他道路使用者(如交通工具、摩托车等)的威胁时),可以针对VRU ITS-S激活VBS。当VRU在斑马线上、在交叉路口处、在人行道/自行车道等上时,VRU应处于活跃状态。每当VRU-ITS-S移动到空闲VRU状态时(例如,当VRU进入公共汽车时),应当终止针对该VRU ITS-S的VBS。只要VBS服务是活跃的,VAM生成、传送和接收就都应当由VBS管理。
2.1.2.V-ITS-S
VBS服务通过ITS-S激活而被激活,以便V-ITS-S接收VAM消息。当ITS-S被停用时,VBS服务应当被终止。只要VBS服务是活跃的,VAM接收就应由VBS管理。
2.1.3.R-ITS-S
VBS服务可以通过ITS-S激活或通过远程配置而被激活。类似地,VBS服务可以通过ITS-S停用或通过远程配置而被停用。例如,在基于远程配置的激活/停用情况下,学校附近R-ITS-S的VBS可被配置成用于在放下学生和接载时间期间被激活,而在其他时间可被停用。只要VBS服务是活跃的,VAM接收就应当由R-ITS-S处的VBS管理。只要VBS服务是活跃的并且R-ITS-S被配置成用于传送基础设施VAM,VAM生成就由VBS管理。
2.2.针对VRU设备的VAM生成频率管理
每个VAM生成事件引起一个VAM的生成。所生成的VAM可按下文所讨论的进行分段。
连续VAM生成事件的开始之间经过的最小时间应当等于或大于值T_GenVam,并且T_GenVam被限制为T_GenVamMin(T_GenVam最小)≤T_GenVam≤T_GenVamMax(T_GenVam最大),其中T_GenVamMin=连续VAM传送之间的最小时间(例如,100ms),并且T_GenVamMax=连续VAM传送之间的最大时间(例如,500ms)。
如果与接入层处的信道拥塞有关的信息在设施层处是可用的,那么T_GenVam应该被相应地调整,例如,可以为较高的信道拥塞情况定义更长的T_GenVam。接入层处的拥塞层也可以(例如,通过监测过去移动时间窗口内来自邻居的周期性数据(诸如BSM、CAM、PSM、VAM)的平均成功率)在设施层处被估计。此类平均成功率的下降可以指示接入层处的增加的拥塞水平。
参数T_GenVam应当由设施层处的管理实体提供。如果管理实体提供该参数的值高于T_GenVamMax,那么T_GenVam被设置为T_GenVamMax,并且如果该值低于T_GenVamMin或该参数未被提供,则T_GenVam被设置为T_GenVamMin。参数T_GenVam表示连续VAM生成事件之间经过的时间的当前有效下限。
如果VRU ITS-S处于VRU-活跃-独立(VRU-ACTIVE-STANDALONE)VBS状态(如[TS103300-3]中所指定),那么它将VAM作为类型‘单VRU VAM’发送。如果VRU ITS-S处于VRU-活跃-集群头(VRU-ACTIVE-CLUSTERHEAD)VBS状态(参见例如[TS103300-3])(例如,如果VRU ITS-S是VRU集群的集群头),则其代表VRU集群传送VAM类型‘VRU集群VAM’。单VRUVAM包括与始发VRU ITS有关的信息,而VRU集群VAM具有与VRU集群有关的信息
2.2.1.由VRU ITS-S处的VBS进行的单独的VAM传送管理
如果以下条件中的任何一项被满足,并且单VRU VAM传送不受第B.3节中指定的冗余缓解技术的影响,则应当立即或在最早的时间第一次生成“单个VRU VAM”以供传送:
1.VRU处于VRU-空闲(VRU-IDLE)VBS状态并且已进入VRU-活跃-独立VBS状态。
2.VRU处于VRU-被动(VRU-PASSIVE)VBS状态;已经决定离开集群,并且进入VRU-活跃-独立VBS状态。
3.VRU处于VRU-被动VBS状态;VRU已经确定一个或多个新的交通工具或其他VRU(例如VRU简档3–骑摩托车者)已经来到横向地比最小安全横向距离(minimum safelateral distance,MSLaD)更接近、纵向地比最小安全纵向距离(minimum safelongitudinal distance,MSLoD)更接近、并且垂直地比最小安全垂直距离(minimum safevertical distance,MSVD)更接近;并且已经决定离开集群并进入VRU-活跃-独立VBS状态,以便传送立即VAM。
4.VRU处于VRU-被动VBS状态;已经确定VRU集群头已经丢失,并已经决定进入VRU-活跃-独立VBS状态。
5.VRU处于VRU-活跃-集群头VBS状态;已经确定分解集群,并且已经传送具有分解指示的VRU集群VAM;并且已经决定进入VRU-活跃-独立VBS状态。
连续的VAM传送取决于本文描述的条件。连续的单VRU VAM生成事件应以等于或大于T_GenVam的间隔发生。如果始发VRU ITS-S仍然处于VBS VRU-活跃-独立VBS状态,并且以下条件中的任何一项或多项被满足,并且单独的VAM传送不受冗余缓解技术(其将在下文中讨论)的影响,则作为生成事件的一部分,单独的VAM应被生成以供传送:
1.自上一次传送单VRU VAM以来所经过的时间超过T_GenVamMax。
2.VRU的参考点的当前估计位置与最后包括在单VRU VAM中的参考点的估计位置之间的欧几里得绝对距离超过预定义阈值(例如,4m)。在一些实现方式中,预定义阈值可以是minReferencePointPositionChangeThreshold(最小参考点位置改变阈值)。
3.VRU的参考点的当前估计地面速度与最后包括在单VRU VAM中的参考点的估计绝对速度之间的差超过预定义阈值(例如,0.5m/s)。在一些实现方式中,预定义阈值可以是minGroundSpeedChangeThreshold(最小地面速度改变阈值)。
4.VRU的参考点的当前估计地面速度向量的定向与最后包括在单VRU VAM中的VRU的参考点的地面速度向量的估计定向之间的差超过预定义阈值(例如,4度)。在一些实现方式中,预定义阈值可以是minGroundVelocityOrientationChangeThreshold(最小地面速度定向改变阈值)。
5.同(一个或多个)交通工具或(一个或多个)其他VRU的当前估计碰撞概率(例如,如由轨迹拦截概率所测得)与单VRU VAM中最后报告的同(一个或多个)交通工具或(一个或多个)其他VRU的估计碰撞概率之间的差超过预定义阈值(例如,4%)。在一些实现方式中,预定义阈值可以是minTrajectoryInterceptionProbChangeThreshold(最小轨迹拦截概率改变阈值)。
6.始发ITS-S是处于VRU-活跃-独立VBS状态的VRU,并且已经在其先前的单VRUVAM传送之后加入集群
7.VRU已经确定一个或多个新的交通工具或其他VRU(例如,VRU简档3-骑摩托车者)在最后传送的VAM之后已经同时满足以下条件:
a.来到横向地比最小安全横向距离(MSLaD)更接近;
b.来到纵向地比最小安全纵向距离(MSLoD)更接近;
c.来到垂直地比最小安全垂直距离(MSVD)更接近。
8.VRU已经确定一个或多个交通工具或其他VRU(例如,VRU简档3-骑摩托车者)在最后传送的VAM之后(例如,在先前传送的VAM之后)已经同时满足以下条件:
a.移动到横向地比最小安全横向距离(MSLaD)更远离;
b.移动到纵向地比最小安全纵向距离(MSLoD)更远离;
c.移动到垂直地比最小安全垂直距离(MSVD)更远离;以及
d.这些交通工具或这些VRU(例如,VRU简档3-骑摩托车者)
i.横向地比最小安全横向距离(MSLaD)更接近,
ii.纵向地比最小安全纵向距离(MSLoD)更接近,以及
iii.在最后传送的VAM中,垂直地比最小安全垂直距离(MSVD)更接近。
2.2.2.由VRU ITS-S处的VBS进行的VRU集群VAM传送管理
如果以下条件中的任何一项被满足,并且VRU集群VAM传送不受冗余缓解技术的影响,则应当立即或在最早的时间第一次生成VRU集群VAM以供传送:
1.处于VRU-活跃-独立VBS状态的VRU确定形成VRU集群
连续的VRU集群VAM传送取决于在此描述的条件。连续的VRU集群VAM生成事件应当以等于或大于T_GenVam的间隔在集群头处发生。如果以下条件中的任何一项被满足,并且VRU集群VAM传送不受冗余缓解技术的影响,则作为生成事件的一部分,VRU集群VAM应当被生成以供集群头传送:
1.自上一次传送VRU集群VAM以来所经过的时间超过T_GenVamMax。
2.VRU集群的参考点的当前估计位置与最后包括在VRU集群VAM中的参考点的估计位置之间的欧几里得绝对距离超过预定义的阈值(例如,4m)。在一些实现方式中,预定义的阈值可以是minReferencePointPositionChangeThreshold(最小参考点位置改变阈值)。
3.VRU集群的参考点的当前估计地面速度与最后包括在VRU集群VAM中的参考点的估计绝对速度之间的差超过预定义的阈值。在一些实现方式中,预定义的阈值可以是minClusterDistanceChangeThreshold(最小集群距离改变阈值)。
4.集群的当前估计宽度与最后传送的VAM中所包括的估计宽度之间的差超过预定义的阈值(例如,2m)。
5.集群的当前估计长度与最后传送的VAM中所包括的估计长度之间的差超过预定义的阈值(例如,2m)。
6.VRU集群的参考点的当前估计地面速度与最后包括在VRU集群VAM中的参考点的估计绝对速度之间的差超过预定义的阈值(例如,0.5m/s)。在一些实现方式中,预定义的阈值可以是minGroundSpeedChangeThreshold(最小地面速度改变阈值)。
7.VRU集群的参考点的当前估计地面速度向量的定向与最后包括在VRU集群VAM中的参考点的地面速度向量的估计定向之间的差超过预定义的阈值(例如,4度)。在一些实现方式中,预定义的阈值可以是minGroundVelocityOrientationChangeThreshold(最小地面速度定向改变阈值)。
8.VRU集群同(一个或多个)交通工具或(一个或多个)其他VRU的当前估计碰撞概率(例如,如由其他交通工具/VRU与具有集群边界区域的轨迹拦截概率所测得)与VAM中最后报告的、同(一个或多个)交通工具或(一个或多个)其他VRU的估计碰撞概率之间的差超过Y%(例如,4%)。在一些实现方式中,预定义的阈值可以是minTrajectoryInterceptionProbChangeThreshold(最小轨迹拦截概率改变阈值)。
9.在先前的VAM生成事件之后,VRU集群类型已经改变(例如从同构集群改变为异构集群,或者从异构集群改变为同构集群)。
10.集群头已经确定在先前的VRU集群VAM的传送之后解散(分解)集群。
11.集群头已经确定在先前的VRU集群VAM的传送之后将该集群与(一个或多个)其他集群合并。
12.集群头知晓在先前的VRU集群VAM的传送之后当前集群的拆分。
13.在传送先前的VRU集群VAM之后,已经有超过预定义数量的新VRU(例如,3个)加入VRU集群。
14.在传送先前的VRU集群VAM之后,已经有超过预定义数量的成员VRU(例如,3个)离开VRU集群。
15.处于VRU-活跃-集群头VBS状态的VRU已经确定在最后传送的VAM之后,一个或多个新的交通工具或非成员VRU(例如,VRU简档3-骑摩托车者)已同时满足以下条件:
a.来到横向地比最小安全横向距离(MSLaD)更接近,
b.来到纵向地比最小安全纵向距离(MSLoD)更接近,以及
c.在最后传送的VAM之后,来到垂直地比最小安全垂直距离(MSVD)更接近于集群边界框。
16.处于VRU-活跃-集群头VBS状态的VRU已经确定在最后传送的VAM之后,一个或多个交通工具或非成员VRU(具有VRU简档3-骑摩托车者)已同时满足以下条件:
a.移动到横向地比最小安全横向距离(MSLaD)更远离,
b.移动到纵向地比最小安全纵向距离(MSLoD)更远离,
c.移动到垂直地比最小安全垂直距离(MSVD)更远离于集群边界框,以及
d.交通工具和/或非成员VRU(例如,VRU简档3—骑摩托车者)横向地比最小安全横向距离(MSLaD)更接近、纵向地比最小安全纵向距离(MSLoD)更接近、并且垂直地比最小安全垂直距离(MSVD)更接近于最后传送的VAM中的集群边界框。
2.2.3.VAM冗余缓解技术
在不影响附近的VRU安全性和VRU认知的情况下,应当考虑设施层处的VAM生成频率与接入层处的通信开销之间的平衡。VAM生成事件下的VAM传送受到以下冗余缓解技术中的一种或多种冗余缓解技术的影响。附加地或替代地,以下冗余缓解技术中的任何冗余缓解技术的一个或多个条件可被组合或被划分。此外,在下面的讨论中,“对等ITS-S”可指本文所讨论的ITS-S中的任何ITS-S,诸如另一VRU ITS-S 116/117、V-ITS-S 110、R-ITS-S130和/或任何其他ITS站。
2.2.3.1.冗余缓解技术1
·如果以下所有条件同时被满足,则始发VRU-ITS-S跳过当前单独的VAM:
ο自始发VRU ITS-S上一次传送VAM以来经过的时间不超过numSkipVamsForRedundancyMitigation(跳过Vams以用于冗余缓解的数量)(例如,4)倍的T_GenVamMax。
ο始发VRU ITS-S的参考点的当前估计位置与从对等ITS-S接收到的VAM中的参考点的估计位置之间的欧几里得绝对距离小于minReferencePointPositionChangeThreshold(最小参考点位置改变阈值)(例如4米)。
ο始发VRU ITS-S的参考点的当前估计速度与从对等ITS-S接收到的VAM中的参考点的估计绝对速度之间的差小于minGroundSpeedChangeThreshold(最小地面速度改变阈值)(例如0.5m/s)。
ο始发VRU ITS-S的当前估计地面速度向量的定向与从对等ITS-S接收到的VAM中的参考点的地面速度向量的估计定向之间的差小于minGroundVelocityOrientationChangeThreshold(最小地面速度定向改变阈值)(例如,4度)。
·或者以下条件中的一个条件被满足:
οVRU咨询适当的地图,以验证VRU是否处于受保护的区域或不可驾驶的区域(诸如建筑物等)中。
οVRU处于被规定为行人专用区的地理区域(低风险地理区域)。
在该区域中仅允许VRU简档1和4(参见表)。
οVRU将其自身视为VRU集群的成员,并且尚未从集群领导者接收到集群分解消息。
ο在T_GenVam内已经由另一ITS-S报告了与自我VRU有关的信息。
2.2.3.2.冗余缓解技术2
·如果以下所有条件同时被满足,则始发VRU-ITS-S跳过当前单独的VAM:
ο自始发VRU ITS-S上一次传送VAM以来经过的时间不超过numSkipVamsForRedundancyMitigation(跳过Vams以用于冗余缓解的数量)(例如,4)倍的T_GenVamMax。
ο在上一个T_GenVamMax持续时间期间已经从对等的ITS-S处接收到VAM。
ο始发VRU ITS-S的参考点的当前估计位置与从对等ITS-S接收到的VAM中的参考点的估计位置之间的欧几里得绝对距离小于minReferencePointPositionChangeThreshold(最小参考点位置改变阈值)(例如,4米)。
ο始发VRU ITS-S的参考点的当前估计速度与从对等ITS-S接收到的VAM中的参考点的估计绝对速度之间的差小于minGroundSpeedChangeThreshold(最小地面速度改变阈值)(例如,0.5m/s)。
ο始发VRU ITS-S的当前估计地面速度向量的定向与从对等ITS-S接收到的VAM中的参考点的地面速度向量的估计定向之间的差小于minGroundVelocityOrientationChangeThreshold(最小地面速度定向改变阈值)(例如,4度)。
2.2.3.3.冗余缓解技术3
·如果以下所有条件同时被满足,则始发VRU-ITS-S跳过当前的VAM:
ο自始发VRU ITS-S上一次传送VAM以来经过的时间不超过N(例如,4)倍的T_GenVamMax;
ο在上一个T_GenVamMax持续时间期间,已经从对等ITS-S接收到VAM(VRU集群VAM或基础设施VAM中的VRU集群容器);
ο始发VRU ITS-S的参考点的当前估计位置与所接收的VAM中指定的集群的边界框中的最近点之间的欧几里得绝对距离小于预定义的阈值(例如,4米);
ο始发VRU ITS-S的参考点的当前估计速度与所接收的VAM中的VRU集群的参考点的估计绝对速度之间的差小于预定义的阈值(例如,0.5m/s);
ο始发VRU ITS-S的参考点的当前估计地面速度向量的定向与所接收的VAM中VRU集群的参考点的地面速度向量的估计定向之间的差小于预定义的阈值(例如,4度)。
2.2.4.VAM分段
生成的VAM的大小不应超过由VBS的NF-SAP(参见例如,[TS103300-3])支持的最大传送单元(MTU)。VAM的MTU可以被称为“MTU_VAM”等等。MTU_VAM取决于通过其传输VAM的接入层技术的MTU(MTU_AL)。具体地,MTU_CPM应小于或等于MTU_AL减去设施层协议的头部大小(HD_VAM)以及联网和传输层协议的头部大小(HD_NT),其中MTU_VAM≤(MTU_AL-HD_VAM-HD_NT)。
当前VAM能力被扩展以使得VAM能够分段成两个或更多个段。当前VAM格式规范不允许对VAM进行分段。VAM分段对于将VAM大小限制为低于由较低层支持的MTU而言是不可避免的。为此,新的容器“VamManagementParameters(Vam管理参数)”可以被添加到现有的VAM结构中,以便携载分段信息,如表3所示。
表3
在用于传送的ASN.1UPER编码的VAM的大小超过MTU_VAM的情况下,应当发生消息分段。内容按照包含优先级的降序顺序被包括在VAM段中。
应通过填充VamSegmentInfo(Vam段信息)DF来指示消息分段。所有消息段应指示同一generationDeltaTime(生成Δ(差量)时间)DE。
消息段可以按照与它们被生成的顺序相同的顺序被传送。这是为了确保包含优先级较高的容器的段不会被较低层机制推迟到支持包含优先级较低的容器的段。
2.2.4.1.由VRU ITS-S处的VBS进行的VAM分段管理
在当前的VAM生成事件中的用于传送的ASN.1UPER编码的VAM(单VRU VAM或VRU集群VAM)的大小超过MTU_VAM的情况下,消息分段应当发生。所选择的容器应按以下降序顺序被包括在VAM段中:VruProfileId(Vru简档Id)、VruDynamicProperties(Vru动力学属性)、VruPhysicalProperties(Vru物理属性)、VamExtension(Vam扩展)。
只要要生成的段的所得ASN.1UPER编码的消息大小不超过MTU_CPM,就应当利用容器来填充段。容器不应当被拆分成两个VAM段。这些段以此种方式生成,直到所有容器都被包括在VAM段中。每个段在下一个传送机会被传送。
2.3.VAM时间要求
2.3.1.VAM生成时间
除了VAM生成频率之外,VAM生成所需的时间和消息构造所用数据的及时性对于数据在接收方ITS-S中的适用性是决定性的。为了确保对接收到的VAM的正确解释,每个VAM被加时间戳。假设不同的ITS-S之间存在可接受的时间同步。
VAM生成所需的时间应小于阈值T_AssembleVAM(T_组装VAM)(例如,50ms)。VAM生成所需的时间是指VAM生成被触发所在的时间与VAM被递送到联网和传输层所在的时间之间的时间差。
2.3.2VAM时间戳
以下要求适用于VAM加时间戳:
·由ITS-S散播的VAM中提供的参考时间戳与在BasicContainer(基本容器)DF和/或VruPhysicalProperties(Vru物理属性)DF中提供的参考位置被始发ITS-S确定所在的时间相对应。时间戳的格式和范围在表4中讨论,和/或在[TS103300-3]的第B.1.3款和/或[EN302637-2]的第B.3款中定义。
表4:generationDeltaTime(生成Δ时间)
·VAM生成时间与参考时间戳之间的差应小于32 767ms。
2.4.示例VAM参数
表5中的参数管理创建、加入或离开集群的VRU决策。参数可在各个设备或系统范围上设置,并且可取决于外部条件或独立于外部条件。
表5:用于VRU聚类决策的参数(第5.4.2款)
表6中的参数管理围绕加入和离开集群的消息收发行为。参数可在各个设备或系统范围上设置,并且可取决于外部条件或独立于外部条件。
表6:集群成员关系参数
表7示出用于VAM生成的参数。参数可在各个设备或系统范围上设置,并且可取决于外部条件或独立于外部条件。
表7:用于VAM生成的参数
表8中的参数管理VAM生成触发。参数可在各个设备或系统范围上设置,并且可取决于外部条件或独立于外部条件。
表8:用于VAM生成触发的参数(第6.4款)
2.5.VAM的示例实现方式
VAM的示例实现方式可包括表9所示的数据字段(data field,DF)和数据元素(data element,DE),VAM的示例实现方式基于SAE国际“Dedicated Short RangeCommunications(DSRC)Message Set Dictionary(专用短程通信(DSRC)消息集字典)”,V2X核心技术委员会,SAE地面交通工具标准J2735,DOI:https://doi.org/10.4271/J2735_202007(2020年7月23日)(“[SAE-J2735]”)以ASN.1表示来表达。
表9
3.由非VRU ITS-S进行的VAM生成和传送
易受伤害道路使用者认知消息(Vulnerable Road User Awareness Message,VAM)是从VRU ITS传送、用于建立并维护对参与VRU系统的易受伤害道路使用者的认知的消息。VAM包含始发VRU ITS-S的状态和属性信息。内容可取决于VRU ITS-S的简档而有所不同。典型的状态信息包括时间、位置、运动状态、集群状态等等。典型的属性信息包括关于VRU简档、类型、尺寸等等的数据。VAM的生成、传送和接收由VRU基本服务(VBS)管理。VRU基本服务是操作VAM协议的设施层实体。它提供三种主要服务:处置VRU角色、发送和接收VAM以增强VRU安全性。在存在高VRU密度的情况下,它还指定VRU聚类概念,以减少VAM通信开销。在VRU聚类中,具有一致的速度和航向的、靠近地定位的VRU形成设施层VRU集群,并且仅集群头VRU传送VAM。集群中的其他VRU跳过VAM传送。(不在VRU集群中的)活跃的VRU发送单独的VAM(称为单VRU VAM)
源自于VRU ITS的VAM不能有效地解决对非装配的VRU(例如,不具有用于Tx、Rx或Tx/Rx两者的任何ITS-S的VRU)的认知。在许多拥挤的情形下(诸如繁忙的交叉路口、斑马线、学校接载和放下区域、公共汽车站、校车站、购物中心附近的繁忙交叉口、建筑施工区等),装配的VRU和非装配的VRU两者都会存在。由单独的VRU ITS-S(作为集群领导者)进行的集群形成和管理受到可用资源(计算、通信、感测)的限制。由单独的VRU形成的VRU集群无法在集群中包括非装配的VRU。在此类情况下,VRU应当能够对集体感知消息(collectiveperception message,CPM)进行解码和解释,以获得针对安全性的完整环境认知。为此,在既包括装配的VRU又包括非装配的VRU的此类场景中,基础设施(诸如R-ITS-S)可以在(经由传感器)检测潜在的VRU并将它们分组到集群中起到至关重要的作用。例如,出于此种目的,静态的RSE可被安装在繁忙的交叉路口、斑马线、学校接载和放下区域、购物中心附近的繁忙交叉口等,而移动的RSE可被安装在规定的交通工具(如校车、城市公共汽车、服务交通工具)上以充当公共汽车站、校车站、建筑施工区等上的基础设施/RSE。
尽管当前的标准(参见例如[TS103300-3])讨论了VAM格式和仅VRU ITS-S进行的传送的各个方面,但当前标准并没有使非VRU ITS-S能够传送VAM。
现有的VAM允许一个自我VRU或一个VRU集群的信息共享。然而,在非VRU ITS-S(例如,RSE或规定的交通工具)VAM的情况下,非VRU ITS-S可能能够在FOV中检测需要在VAM中报告的一个或多个单独的VRU和/或一个或多个VRU集群。本文提出了对现有VAM格式的修改,以实现非VRU ITS-S VAM。在非VRU ITS-S VAM中,一个或多个VRU和/或一个或多个VRU集群的VRU认知内容被携载。
在下面的讨论中,由非VRU ITS-S(例如,R-ITS-S 130、V-ITS-S 110等)生成和传送的VAM可被称为“非VRU VAM”(或“nVAM”),并且由基础设施装备(例如,R-ITS-S 130)生成和传送的VAM可被称为“基础设施VAM”(或“iVAM”)。尽管iVAM由基础设施设备传送,并且nVAM由其他非VRU ITS-S(例如,V-ITS-S 110、R-ITS-S 130等)传送,但贯穿本公开,这些术语可以可互换地使用。
另外,非VRU ITS-S辅助的VRU聚类的详细机制(既包括装配的VRU又包括非装配的VRU)被考虑,其中非VRU ITS-S(诸如R-ITS-S)充当集群领导者并传送非VRU ITS-S VAM。
由非VRU ITS单独地报告所有检测到的VRU和/或VRU集群在某些场景中可能是非常低效的,这些场景诸如存在大量的VRU或VRU的视图重叠或VRU在始发非VRU ITS-S处的传感器的FOV中被遮挡。在存在大量感知到的VRU和/或VRU集群的情况下,在对所有VRU和/或VRU集群进行报告时,经由VAM中的现有DF/DE进行此类报告需要大的通信开销以及增加的延迟。非VRU ITS-S可能需要使用自我准入控制、冗余缓解或自包含分段来管理接入层中的拥塞。自包含分段是独立的VAM消息,并且可以在每个连续的VAM生成事件中被传送。
3.1.基础设施VAM
基础设施辅助的VRU聚类既包括装配的VRU又包括非装配的VRU,其中基础设施(例如R-ITS-S 130)充当集群头并传送VAM。这些VAM在本文中可被称为“基础设施VAM”(或“iVAM”)。因此,现有的VBS被扩展以允许非VRU ITS-S(例如,R-ITS-S 130和/或规定的V-ITS-S 110)传送基础设施VAM(“iVAM”)。VAM触发条件/事件和VAM格式也出于此种目的而改变。附加地或替代地,下文所讨论的iVAM/nVAM的触发事件/条件和/或和VAM格式中的一些或全部是特定于非VRU和/或特定于基础设施装备的。
VAM格式规范(参见例如,[TS103300-3])缺乏要被包括在VRU集群VAM中的内容的细节。由非VRU集群头传送的VRU集群VAM的内容,以及包括VAM中的此类内容的新的DF和DE在下文讨论。
现有的VAM允许与一个VRU或一个VRU集群有关的信息共享。然而,在非VRU ITS-SVAM传送的情况下,非VRU ITS-S可检测需要在VAM中报告的一个或多个单独的VRU 116和/或一个或多个VRU集群。如下文所讨论,VBS和VAM格式被扩展以使得非VRU ITS-S能够在同一基础设施VAM中报告一个或多个VRU 116和/或一个或多个VRU集群的VRU认知内容。
当前标准(参见例如,[TS103300-3])不允许对VAM进行分段。然而,VAM分段对于将VAM大小限制为低于由较低层支持的最大传送单元(MTU)而言是不可避免的。具体地,VAM分段对于由非VRU ITS-S报告的iVAM是有用的,因为iVAM包括将一个或多个VRU 116和/或一个或多个VRU集群的VRU认知内容包括在同一VAM中。如下文所讨论,(一个或多个)VBS操作和VAM格式被修改,以使得能够将VAM分段成两个或更多个VAM段。本文中还讨论了针对逐候选者(例如,被选择为包括在要被分段的VAM中的感知到的VRU和VRU集群)效用函数计算,逐候选者效用函数计算用作决定包含在连续VAM段中的顺序的优先级。综上所述:
·基础设施辅助的VRU聚类的机制既包括装配的VRU又包括非装配的VRU,其中基础设施(例如R-ITS-S 130)充当集群头并传送VAM(称为基础设施VAM)。
·扩展现有的VRU基本服务(VBS),使得非VRU ITS-S(诸如RSU或规定的交通工具)能够传送基础设施VAM,包括出于此目的VAM触发和VAM格式的改变。
·提供(由V-ITS-S集群头或R-ITS-S集群头传送的)VRU集群VAM的内容以及用于将这些提供的内容包括在VAM中的新的DF和DE。
·修改现有的VBS和VAM格式以使得非VRU ITS-S能够在同一基础设施VAM中报告一个或多个VRU和/或一个或多个VRU集群的VRU认知内容。
·修改VBS操作和VAM格式,以使得能够将VAM分段为两个或更多个段,包括逐候选者(例如,被选择为包括在要被分段的VAM中的感知到的VRU和VRU集群)效用函数计算,该逐候选者效用函数计算用作决定包含在连续VAM段中的顺序的优先级。
·为VAM提供新的DE/DF,使得CH(集群头)能够在解散VRU集群之前向其成员发送多个指示以及解散原因。在现有的VAM格式中,CH无法在解散VRU集群之前发送任何解散指示。
·扩展现有的VAM以使得能够在现有的CH对CH角色不再感兴趣、CH即将移出VRU集群边界框等情况下将CH角色移交给新的ITS-S。
·提供新的容器(ClusterMergeInfo(集群合并信息)),用于合并来到其中边界框部分地或完全重叠的更接近处的两个或更多个集群。
·提供新容器(ClusterSplitInfo(集群拆分信息)),以使得能够将集群拆分为两个或更多个新集群。
在各个实现方式中,站提供ITS服务,ITS服务涉及ITS服务消息(例如VAM)的传送和接收。在设施层消息中,应用容器与(一个或多个)ITS PDU领导者和/或ITS服务容器一起使用。
一些实现方式可以在ETSI ITS标准/框架和/或边缘计算标准/框架(例如,多接入边缘计算(MEC)等等)中被指定和/或被标准化,并且是跨城市或地理区域容易扩展的。在这些实现方式中,一个或多个边缘计算应用(例如,MEC应用)可提供VBS并且生成、接收和传送VAM。
3.1.1.由非VRU ITS-S进行的VAM生成
非VRU ITS-S可以包括,例如,R-ITS-S 130和/或V-ITS-S 110。当前标准和解决方案(参见例如,[TS103300-3])没有有效地解决对非装配的VRU的认知。在许多情况下(诸如繁忙的交叉路口、斑马线、学校接载和放下区域、公共汽车站、校车站、购物中心附近的繁忙交叉口、建筑施工区等),装配的VRU和非装配的VRU两者都会存在。由单独的VRU形成集群可能不是容易的,并且由VRU形成的VRU集群也无法在该集群中包括非装配的VRU。在包括装配的VRU和非装配的VRU两者的此类场景中,基础设施(例如,RSU ITS-S)可以在检测潜在的VRU集群中起到至关重要的作用。例如,出于此目的,静态的RSU可被安装在繁忙的交叉路口、斑马线、学校接载和放下区域、购物中心附近的繁忙交叉口等,而移动的RSU可被安装在规定的交通工具(如校车、城市公共汽车、服务交通工具)上以充当公共汽车站、校车站、建筑施工区等上的基础设施/RSU。类似地,交通工具处的传感器可以检测装配的和非装配的VRU或VRU集群,并报告VAM。从非VRU ITS-S(例如,R-ITS-S 130和/或V-ITS-S 110)传送的任何VAM被称为“基础设施VAM”。下面的讨论与R-ITS-S/RSU传送和/或接收VAM的示例相关,然而,本文中的描述也可适用于从交通工具ITS-S生成和传送/接收的VAM。
非VRU ITS-S(例如R-ITS-S 130)从本地传感器持续检测/感知装配的和非装配的VRU,和/或从交通工具和VRU接收V2X消息,诸如BSM、CAM、DENM、CPM、VAM等。RSU可能已经检测到交叉路口或人行道上的若干VRU。
在另一种情况下,R-ITS-S 130(例如,路边装备(Roadside Equipment,RSE)、路边单元(Road Side Unit,RSU)等)可以与智能交通灯控制器和/或其他交通控制元件共同定位。等待穿过交叉路口的若干VRU可能已经向交通灯控制器要求或指示穿过该交叉路口。RSU可以从交通灯容器中获得这些信息,并使用该信息来创建VRU集群。
一旦由R-ITS-S 130检测到数个VRU 116,R-ITS-S 130就确定生成基础设施VAM,如下文第2.2节所描述。如果若干感知到的VRU 116(例如,超过阈值数量)彼此非常接近,并且具有如(参见例如[TS103300-3])中定义的一致的速度和航向,则R-ITS-S 130可以确定充当集群头(cluster head,CH)将它们报告为集群。RSU可以找到多于一个此类VRU集群(例如,穿过交叉路口的VRU和在人行道上行走的VRU)以用于报告。一些VRU可能需要单独地报告,因为它们可能离其他VRU很远,或者它们的速度可能不同到超过了速度差阈值。
一旦R-ITS-S 130确定报告一个或多个单独的感知到的VRU和/或一个或多个感知到的VRU集群,R-ITS-S 130就会生成VAM,并在单个基础设施VAM中一起报告它们。R-ITS-S130通过发送VAM并指定集群边界框来指示其用作感知到的集群的集群头。在所报告的边界框中的装配的VRU停止发送VAM。
在一些情况下,VRU集群可能已经由VRU-ITS-S报告,并且RSU感知所报告的集群边界框内和/或边界框周围的非装配的VRU。RSU可以发送VAM,该VAM包括具有相同的或增加的边界框的装配的和非装配的VRU。充当集群头的VRU-ITS-S随后停止发送VRU集群VAM。
3.1.2.用于VRU设备的设施VAM生成频率管理
3.1.2.1.用于基础设施VAM的VAM生成和频率
每个VAM生成事件引起一个VAM的生成。所生成的VAM可按下文所讨论的进行分段。
连续VAM生成事件的开始之间经过的最小时间应当等于或大于值T_GenVam,并且T_GenVam被限制为T_GenVamMin≤T_GenVam≤T_GenVamMax,其中T_GenVamMin=连续VAM传送之间的最小时间(例如,100ms),并且T_GenVamMax=连续VAM传送之间的最大时间(例如,500ms)。
如果与接入层处的信道拥塞有关的信息在设施层处是可用的,那么T_GenVam应该被相应地调整,例如,可以为较高的信道拥塞情况定义更长的T_GenVam。接入层处的拥塞层也可以(例如,通过监测过去移动时间窗口内来自邻居的周期性数据(例如BSM、CAM、PSM、VAM)的平均成功率)在设施层处被估计。此类平均成功率的下降可以指示接入层处的增加的拥塞水平。
参数T_GenVam应当由设施层处的管理实体提供。如果管理实体提供该参数的值高于T_GenVamMax,那么T_GenVam就被设置为T_GenVamMax。如果该值低于T_GenVamMin或者该参数未被提供,那么T_GenVam就被设置为T_GenVamMin。参数T_GenVam表示连续VAM生成事件之间经过的时间的当前有效下限。
3.1.2.2.在非VRU ITS-S处传送VAM
处于VRU-活跃-独立状态的VRU ITS-S应当发送“单独的VAM”,而处于VRU-活跃-集群领导者VBS状态的VRU ITS-S应当代表VRU集群传送“集群VAM”。处于VRU-被动的VBS状态的集群成员VRU ITS-S在离开VRU集群时,应当发送包含VruClusterOperationContainer(Vru集群操作容器)的单独的VAM。处于VRU-活跃-独立的VRU ITS-S在加入VRU集群时应当发送作为包含VruClusterOperationContainer的“单独的VAM”的VAM。
在一些情况下,尤其在检测到非装配的VRU时,非VRU ITS-S(例如,规定的交通工具上的静态RSE或移动RSE,如校车、建筑施工车、警车)可能需要传送VAM(例如,基础设施VAM)。此类基础设施VAM可被传送,以用于报告单独的检测到的VRU或(一个或多个)VRU集群。非VRU ITS-S可以通过在同一基础设施VAM中包括零个或多个单独检测到的VRU和零个或多个VRU集群来选择传送基础设施VAM,从而在同一基础设施VAM中报告单独检测到的VRU和(一个或多个)VRU集群。
3.1.2.3.由非VRU ITS-S处的VBS进行的VAM传送管理
如果非VRU ITS-S尚未传送连续的(诸如周期性的)基础设施VAM,并且基础设施VAM传送不受冗余缓解技术的影响,则当以下条件中任一条件被满足时,应立即或在最早时间第一次生成基础设施VAM以供传送:
1)由始发非VRU ITS-S检测到至少一个VRU,其中检测到的VRU在至少T_GenVamMax持续时间内尚未传送VAM;检测到的VRU的感知到的位置未落在由始发非VRU ITS-S在上一个T_GenVamMax持续时间期间接收到的任何VRU集群VAM中指定的集群的边界框中;并且检测到的VRU未被包括在由始发非VRU ITS-S在上一个T_GenVamMax持续时间期间接收到的任何基础设施VAM中。
2)由始发非VRU ITS-S检测到至少一个VRU集群,其中检测到的VRU集群的集群头在至少T_GenVamMax持续时间内尚未传送VRU集群VAM;检测到的VRU集群的感知到的边界框与由始发非VRU ITS-S在上一个T_GenVamMax持续时间期间接收到的VRU集群VAM或基础设施VAM中指定的任何VRU集群的边界框重叠不超过预定义的阈值maxInterVRUClusterOverlapInfrastructureVAM(最大VRU集群间重叠基础设施VAM)。
连续的基础设施VAM传送取决于在此描述的条件。连续的基础设施VAM生成事件应当以等于或大于T_GenVam的间隔发生。如果始发非VRU ITS-S具有要被包括在当前的基础设施VAM中的至少一个所选择的感知到的VRU或VRU集群,则作为生成事件的部分,基础设施VAM应当被生成以供传送。
当前VAM能力被扩展,以使非VRU ITS-S(例如RSU或交通工具)能够传送VAM。当前VAM格式仅允许VRU ITS-S(作为单独的VRU或作为VRU集群头)发送VAM。由于VAM传送方ITS-S可能不是VRU(像由R-ITS-S(或V-ITS-S)生成VAM的情况那样),因此新的数据元素(originatingStationType(始发站类型)和originatingStationReferencePosition(始发站参考位置))被包括在现有的VAM中,以使得非VRU ITS-S能够传送VAM。这些新的DE被添加到新的‘VamManagementParameters(Vam管理参数)’DF/容器中。OriginatingStationType指示VAM传送方站是VRU、交通工具还是RSU。在非VRU ITS-S生成VAM的情况下,originatingStationReferencePosition为与所报告的VRU或VRU集群相关的所有测量提供参考点。要被引入的新DE VamType(Vam类型)指示VAM是单VRU VAM、VRU集群VAM还是基础设施VAM等等,如下文所示。当前VAM能力被扩展,以使得非VRU ITS-S能够在同一VAM中报告一个或多个VRU和/或一个或多个VRU集群的VRU认知内容--通过定义‘vamParameters SEQUENCE(SIZE(0..MAX))OF VamParameter,'。现有的VAM允许与每个VAM中的一个VRU或一个VRU集群有关的信息共享。这些改变由表10示出。
表10
新的ClusterID(集群ID)DE用于指定集群ID,从而使得非VRU ITS-S(例如,R-ITS-S和V-ITS-S)能够在同一VAM中报告多个VRU集群。新的集群ID包括集群头的站ID以及intraClusterHeadID(集群头内ID),以使由同一非VRU ITS-S领导/管理的多个集群分离。由表11示出示例ClusterID DE。
表11
如果非VRU ITS-S尚未传送连续的(例如,周期性的)基础设施VAM,基础设施VAM传送不受冗余缓解技术的影响并且以下条件中任一条件被满足,则应立即或在最早时间生成基础设施VAM以供传送:
1.由始发非VRU ITS-S检测到至少一个VRU,其中检测到的VRU在至少T_GenVamMax持续时间内尚未传送VAM;检测到的VRU的感知到的位置并非落在由始发非VRU ITS-S在上一个T_GenVamMax持续时间期间接收到的任何VRU集群VAM中指定的集群的边界框内;并且检测到的VRU未被包括在由始发非VRU ITS-S在上一个T_GenVamMax持续时间期间接收到的任何基础设施VAM中。
2.由始发非VRU ITS-S检测到至少一个VRU集群,其中检测到的VRU集群的集群头在至少T_GenVamMax持续时间内尚未传送VRU集群VAM;检测到的VRU集群的感知到的边界框与由始发非VRU ITS-S在上一个T_GenVamMax持续时间期间接收到的VRU集群VAM或基础设施VAM中指定的任何VRU集群的边界框重叠不超过预定义阈值(例如,80%)。
连续的基础设施VAM传送取决于下文描述的条件。连续的基础设施VAM生成事件应当以等于或大于T_GenVam的间隔发生。如果始发非VRU ITS-S具有要被包括在当前的基础设施VAM中的至少一个所选择的感知到的VRU或VRU集群,则作为生成事件的部分,基础设施VAM应当被生成以供传送。
3.1.2.4.当前基础设施VAM和/或其他非VRU ITS-S VAM中的感知到的VRU包含管理
针对包含在当前基础设施VAM中而考虑的感知到的VRU应满足所有这些条件:
1)始发非VRU ITS-S在至少T_GenVamMax持续时间内尚未接收到来自检测到的VRU的任何VAM;
2)检测到的VRU的感知到的位置未落在由始发非VRU ITS-S在上一个T_GenVamMax持续时间期间接收到的任何VRU集群VAM中指定的VRU集群的边界框中;
3)检测到的VRU未被包括由始发非VRU ITS-S在上一个T_GenVamMax持续时间期间接收到的任何基础设施VAM中;以及
4)检测到的VRU未落在由始发非VRU ITS-S报告的任何基础设施VAM(包括要被包括在当前基础设施VAM中的VRU集群)中。
如果感知到的VRU附加地满足以下条件之一,则满足以上条件并且不受冗余缓解技术的影响的、以足够的置信度水平感知到的VRU被选择以用于包含在当前VAM生成事件中:
1)在上一次基础设施VAM生成事件之后,VRU第一次被始发非VRU ITS-S检测到。
2)自上一次感知到的VRU被包括在基础设施VAM中以来经过的时间超过T_GenVamMax。
3)感知到的VRU的参考点的当前估计位置与最后包括在基础设施VAM中的感知到的VRU的参考点的估计位置之间的欧几里得绝对距离超过预定义阈值minReferencePointPositionChangeThreshold(最小参考点位置改变阈值)(例如,4m)。
4)感知到的VRU的参考点的当前估计地面速度与最后包括在基础设施VAM中的感知到的VRU的参考点的估计绝对速度之间的差超过预定义阈值minGroundSpeedChangeThreshold(最小地面速度改变阈值)(例如,0.5m/s)。
5)感知到的VRU的参考点的当前估计地面速度向量的定向与最后包括在基础设施VAM中的感知到的VRU的参考点的地面速度向量的估计定向之间的差超过预定义阈值minGroundVelocityOrientationChangeThreshold(最小地面速度定向改变阈值)(例如,4度)。
6)感知到的VRU同(一个或多个)交通工具或(一个或多个)其他VRU的当前估计碰撞概率(例如,如由轨迹拦截概率所测得)与基础设施VAM中最后报告的感知到的VRU同(一个或多个)交通工具或(一个或多个)其他VRU的估计碰撞概率之间的差超过预定义阈值(例如,4%)。
7)在最后传送的基础设施VAM之后,一个或多个新的交通工具或其他VRU(例如,VRU简档3—骑摩托车者)已经来到横向地比最小安全横向距离(MSLaD)更接近、纵向地比最小安全纵向距离(MSLoD)更接近、并且垂直地比最小安全垂直距离(MSVD)更接近VRU。
8)一个或多个交通工具或其他VRU(具有VRU简档3—骑摩托车者)已经移动到横向地比最小安全横向距离(MSLaD)更远离、纵向地比最小安全纵向距离(MSLoD)更远离、并且垂直地比最小安全垂直距离(MSVD)更远离于VRU,并且这些交通工具或这些VRU(例如,VRU简档3--骑摩托车者)横向地比最小安全横向距离(MSLaD)更接近、纵向地比最小安全纵向距离(MSLoD)更接近、并且垂直地比最小安全垂直距离(MSVD)更接近于最后传送的基础设施VAM中的VRU。
3.1.2.5.当前基础设施VAM和/或其他非VRU ITS-S VAM中的感知到的VRU集群包含管理
针对包含在当前基础设施VAM而考虑的感知到的VRU集群应满足以下条件中的全部:
1检测到的VRU集群的感知到的边界框与由始发非VRU ITS-S在上一个T_GenVamMax持续时间期间接收到的VRU集群VAM或基础设施VAM中指定的VRU集群的边界框重叠不超过X%(80%)。
如果感知到的VRU集群附加地满足以下条件之一,则满足以上条件并且不受冗余缓解技术的影响、以足够的置信度水平感知到的VRU集群应被选择以用于包含在当前VAM生成事件中:
1.在上一次基础设施VAM生成事件之后,VRU集群第一次被始发非VRU ITS-S检测到
2.自上一次感知到的VRU集群被包括在基础设施VAM中以来经过的时间超过T_GenVamMax
3.感知到的VRU集群的参考点的当前估计位置与最后包括在基础设施VAM中的感知到的VRU集群的参考点的估计位置之间的欧几里得绝对距离超过预定义阈值minReferencePointPositionChangeThreshold(最小参考点位置改变阈值)(例如,4m)
4.感知到的VRU集群的当前估计宽度与被包括在最后传送的VAM中的感知到的VRU集群的估计宽度之间的差超过预定义的阈值minClusterWidthChangeThreshold(最小集群宽度改变阈值)(例如,2m)
5.感知到的VRU集群的当前估计长度与被包括在最后传送的VAM中的感知到的VRU的估计长度之间的差超过预定义的阈值minClusterLengthChangeThreshold(最小集群长度改变阈值)(例如,2m)
6.感知到的VRU集群的参考点的当前估计地面速度与被包括在最后传送的VAM中的参考点的估计绝对速度之间的差超过预定义阈值minGroundSpeedChangeThreshold(最小地面速度改变阈值)(例如,0.5m/s)
7.感知到的VRU集群的参考点的当前估计地面速度向量的定向与被包括在最后传送的基础设施VAM中的参考点的地面速度向量的估计定向之间的差超过预定义阈值minGroundVelocityOrientationChangeThreshold(最小地面速度定向改变阈值)(例如,4度)
8.感知到的VRU集群同(一个或多个)交通工具或(一个或多个)其他VRU的当前估计碰撞概率(例如,如由其他交通工具/VRU的轨迹与VRU集群边界框的轨迹的轨迹拦截概率所测得)与感知到的VRU集群同基础设施VAM中最后报告的(一个或多个)交通工具或(一个或多个)其他VRU的估计碰撞概率之间的差超过预定义阈值(例如,4%)
9.始发非VRU ITS-S已确定在先前的基础设施VAM生成事件之后将感知到的集群与(一个或多个)其他集群合并
10.始发非VRU ITS-S已确定在先前的基础设施VAM生成事件之后对当前集群进行拆分
11.始发非VRU ITS-S已确定先前的基础设施VAM生成事件之后感知到的VRU集群的类型的改变(例如,例如从同构集群改变为异构集群,或者从异构集群改变为同构集群)
12.始发非VRU ITS-S已经确定在最后传送基础设施VAM之后一个或多个新交通工具或非成员VRU(例如,VRU简档3—骑摩托车者)已经来到横向地比最小安全横向距离(MSLaD)更接近、纵向地比最小安全纵向距离(MSLoD)更接近、并且垂直地比最小安全垂直距离(MSVD)更接近于集群边界框
13.始发非VRU ITS-S已经确定一个或多个交通工具或非成员VRU(具有VRU简档3—骑摩托车者)已经移动到横向地比最小安全横向距离(MSLaD)更远离、纵向地比最小安全纵向距离(MSLoD)更远离、并且垂直地比最小安全垂直距离(MSVD)更远离于集群边界框,并且这些交通工具或这些VRU(例如,VRU简档3—骑摩托车者)横向地比最小安全横向距离(MSLaD)更接近、纵向地比最小安全纵向距离(MSLoD)更接近、并且垂直地比最小安全垂直距离(MSVD)更接近于在最后传送的基础设施VAM中的集群边界框。
该描述扩展了当前VAM能力,使得VAM能够分段成两个或更多个段。当前VAM格式不允许分段。VAM分段对于将VAM大小限制为低于由较低层支持的最大传送单元(MTU)是不可避免的--对于由非VRU ITS-S(如RSU)报告基础设施VAM的情况尤其如此。应注意,所提出的基础设施VAM可以在同一VAM消息中包括针对一个或多个VRU和/或一个或多个VRU集群的VRU认知内容。新的容器“VamManagementParameters(Vam管理参数)”被添加到现有的VAM结构,以便携载分段信息,如表12所示。
表12
3.1.2.6.对VAM能力的其他增强
现有VAM的修改细节在下文第2.3节中提供。修改中的一些修改如下。
该描述包括对现有VAM格式的修改,以使得能够通过定义‘activeProfile asSEQUENCE(Size(0..MAX))OF VruProfileId’来报告存在于VRU集群中的每个VRU简档类型。现有的VAM格式(参见例如,[TS103300-3])无法指示VRU集群是同构的还是异构的,以及在异构的情况下VRU集群中存在哪些类型的VRU。示例由表13示出。
表13
本文中讨论的VAM格式的改变使得VRU能够提供与加入和退出(离开)集群相关的细节以及这样做的(一个或多个)原因。表14示出此类VAM的示例。
表14
ClusterID(集群ID)DE用于指定集群ID,从而使得非VRU ITS-S(例如,R-ITS-S和V-ITS-S)能够在同一VAM中报告多个VRU集群。新集群ID包括集群头的站ID并且包括intraClusterHeadID(集群头内ID),以使由同一非VRU ITS-S领导/管理的多个集群分离。表15示出此类VAM的示例。
表15
新的DE/DF被提供以使得集群头(CH)能够在解散VRU集群之前向其成员发送多个指示以及解散原因。在现有的VAM格式中,CH无法在解散VRU集群之前发送任何解散指示,这可能导致其成员标识集群解散的较长延迟。示例由表16示出。
表16
描述了对现有的VAM进行扩展,以使得在某个场景中,在现有的CH对CH角色不再感兴趣、CH即将移出VRU集群边界框的情况下CH角色能够移交给新的ITS-S。例如,在穿过交叉路口期间,CH可能到达道路的另一侧的人行道,并且不再需要处于集群中,而其他成员仍然处于交叉路口/斑马线上、从而需要进行聚类。这些改变允许现有的CH推选新的CH,并顺利地移交CH角色。否则,VRU集群需要被解散,并且新的VRU集群形成过程需要被启动,从而产生大量的VAM开销。应注意,在解散之后,每个成员在加入新的集群之前都需要发送至少一个VAM。示例由表17示出。
表17
新的容器(ClusterMergeInfo(集群合并信息))被提供,以合并两个或更多个集群,这些集群来到具有部分或完全地重叠的边界框的更接近处并且具有一致的速度和航向。该容器中的这些DE和DF允许这些集群的CH进行协商、商定以及将集群合并为新的更大的集群,从而进一步减少VAM开销。所提供的容器也使这些集群的成员知晓正在进行的合并过程。示例由表18示出。
表18
该描述还包括新的容器(ClusterSplitInfo(集群拆分信息)),以使得能够将集群拆分为两个或更多个的新集群,为拆分后的集群推选CH,并且使成员以及时的方式被通知正在进行的拆分过程。示例由表19示出。
表19
3.1.3.示例实现方式VAM
本文中讨论的包括相关DF和DE的VAM的示例实现方式由表20所示,该示例实现方式以基于[SAE-J2735]的ASN.1表示来表达。
表20
3.2.启用由非VRU ITS-S进行的VAM生成和传送
如先前所提及,VAM是从VRU ITS传送的消息,以建立并且维护对参与VRU系统的易受伤害道路使用者的认知。VAM包含始发VRU ITS-S的状态和属性信息。内容可取决于VRUITS-S的简档而有所不同。典型的状态信息包括时间、位置、运动状态、集群状态等等。典型的属性信息包括关于VRU简档、类型、尺寸等等的数据。VAM的生成、传送和接收由VRU基本服务(VBS)通过实现VAM协议来管理。VRU基本服务是操作VAM协议的设施层实体。它提供三种主要服务:处置VRU角色、发送和接收VAM以增强VRU安全性。当前标准(参见例如,[TS103300-3])在存在高VRU密度时也采用了VRU聚类概念,以减少VAM通信开销。在VRU聚类中,具有一致的速度和航向的靠近地定位的VRU形成设施层VRU集群,并且仅集群头VRU传送VAM。集群中的其他VRU跳过VAM传送。(不在VRU集群中的)活跃的VRU发送单独的VAM(称为单VRU VAM)。
源自于VRU ITS-S的VAM不能有效地解决对非装配的VRU的认知。在许多情况下(诸如繁忙的交叉路口、斑马线、学校接载和放下区域、公共汽车站、校车站、购物中心附近的繁忙交叉口、建筑施工区等),装配的VRU和非装配的VRU两者都会存在。由单独的VRU形成集群可能不是容易的,并且由VRU形成的VRU集群也无法在该集群中包括非装配的VRU。基础设施(例如,静止的RSU ITS-S(R-ITS-S))可以在既包括装配的VRU又包括非装配的VRU的此类场景中检测潜在的VRU集群起着至关重要的作用。例如,出于此目的静态的RSU可被安装在繁忙的交叉路口、斑马线、学校接载和放下区域、购物中心附近的繁忙交叉口等,而移动的R-ITS-S可被安装在规定的交通工具上(例如校车、城市公共汽车、服务交通工具)以充当公共汽车站、校车站、建筑施工区等上的基础设施。
本公开提供了既包括装配的VRU又包括非装配的VRU的基础设施辅助的VRU聚类,其中基础设施(例如R-ITS-S)充当集群头并传送VAM(被称为“基础设施VAM”、“iVAM”等等)。现有的VBS被扩展成允许非VRU ITS-S(例如,RSU或规定的交通工具)传送iVAM。
现有的VAM允许与每个VAM中的一个VRU或一个VRU集群有关的信息共享。然而,在非VRU ITS-S(例如,RSU或规定的交通工具ITS-S(V-ITS-S))VAM的情况下,非VRU ITS-S可检测需要在VAM中报告的一个或多个单独的VRU和/或一个或多个VRU集群。现有的VAM格式被修改,以使非VRU ITS-S能够在同一iVAM中报告针对一个或多个VRU和/或一个或多个VRU集群的VRU认知内容。当前标准(参见例如,[TS103300-3])不允许对VAM进行分段。
由非VRU ITS报告所有检测到的VRU和/或VRU集群在某些场景中可能是非常低效的,这些场景诸如存在大量的VRU或VRU的重叠视图或VRU在始发非VRU ITS-S处的传感器的FOV中被遮挡。例如,在大型感知到的VRU和/或VRU集群的情况下,经由VAM中的现有的DF/DE进行此类报告会产生巨大的通信开销,并且还花费较长的时间来报告所有VRU和/或VRU集群,因为VAM消息可能需要被分段成多个段。在每个连续的VAM生成事件中可以传送一个段,从而花费若干个VAM生成时段来传送VAM。因此,基于占用网格的带宽高效的VRU认知消息应该被支持,以辅助大量检测到的VRU和/或VRU集群或VRU的重叠视图或FOV中VRU的遮挡。每个网格的值可指示VRU的存在、VRU集群的存在、VRU和/或VRU集群的不存在,等等。此外,非VRU ITS-S通过集体感知服务(collective perception service,CPS)经由交换集体感知消息(collective perception message,CPM)来对环境具有更好的感知[4]。预期VRU不会监听CPM。然而,非VRU ITS-S可以通过添加基于占用网格/成本图的DF,经由VAM将从CPS获取的感知到的环境信息共享给VRU。基于分层成本图或占用网格的DF被包括在VAM中,该基于分层成本图或占用网格的DF可以替换或补充VAM的现有DF/DE,从而节省大量的通信开销。
现有的VRU基本服务(VBS)被扩展,以使非VRU ITS-S能够传送VAM。现有的VAM格式也被扩展和/或被修改,以使非VRU ITS-S能够在同一iVAM中报告针对一个或多个VRU和/或一个或多个VRU集群的VRU认知信息。VAM格式的这些改变包括新的DF和/或DE以及对现有DE和/或DF的修改。
非VRU ITS-S也可以生成和传送基于占用网格的带宽高效的VAM。这些VAM可能可适用于其中检测到大量VRU和/或VRU集群的情况,其中VRU的重叠视图被检测到,和/或在FoV中的(一个或多个)VRU遮挡情况被检测到。基于分层成本图或占用网格的新DF被添加到此类VAM,以使得非VRU ITS-S能够以带宽高效方式将从CPS获取的感知到的环境信息共享给VRU。
预计VRU的安全性是在公共道路上采用CA/AD交通工具的关键障碍之一。本文中讨论的非VRU ITS-S VAM传送和VAM格式确保了道路上的VRU的安全性,同时与现有的解决方案相比,减少了计算和信令开销。
节点进行的各种消息传送可以使用已知的机制进行追踪和/或跟踪。非VRU ITS-SVAM传送和VAM格式可以被采用、指定、标准化或并入蜂窝标准(诸如ETSI和/或3GPP、边缘计算标准(例如,ETSI MEC等等)),和/或可以与各种无线电接入技术(RAT)结合使用。
3.2.1.由非VRU ITS-S(例如R-ITS-S或V-ITS-S)进行的VAM的生成和传送
如先前所提及,当前标准/规范未能有效地解决对非装配的VRU的认知。在许多情况下(诸如繁忙的交叉路口、斑马线、学校接载和放下区域、公共汽车站、校车站、购物中心附近的繁忙交叉口、建筑施工区等),装配的VRU和非装配的VRU两者都会存在。由单独的VRU形成集群可能不是容易的,并且由VRU形成的VRU集群也无法在该集群中包括非装配的VRU。基础设施(例如,RSU ITS-S)可以在既包括装配的VRU又包括非装配的VRU的此类场景中检测潜在的VRU集群起着至关重要的作用。例如,出于此目的,静态的RSU可被安装在繁忙的交叉路口、斑马线、学校接载和放下区域、购物中心附近的繁忙交叉口等,而移动的RSU可被安装在规定的交通工具上(例如,校车、城市公共汽车、服务交通工具)以充当公共汽车站、校车站、建筑施工区等上的基础设施/RSU。类似地,交通工具处的传感器可以检测装配的和非装配的VRU或VRU集群,并报告VAM。出于本公开的目的,从非VRU ITS-S(例如,R-ITS-S或V-ITS-S)传送的VAM被称为“基础设施VAM”、“iVAM”等等。
非VRU ITS-S(例如,RSU或交通工具)从本地传感器持续地检测/感知装配的VRU和非装配的VRU。非VRU ITS-S可以通过彼此协作(诸如通过CPS[4]经由共享/接收CPM消息)来检测/感知装配的和非装配的VRU。非VRU ITS-S可能已经检测到交叉路口处或人行道上的若干VRU。在另一种情况下,路边装备(RSE)/RSU可能与(一个或多个)智能交通灯控制器共同定位。等待穿过交叉路口的若干VRU可能已经向交通灯控制器要求或指示穿过该交叉路口。RSU可以从交通灯控制器取得这些信息,并使用该信息来标识一个或多个VRU集群。如果若干个感知到的VRU(超过阈值数量)彼此非常接近,并且具有[TS103300-3]中定义的一致的速度和航行,则非VRU ITS-S可以确定将它们作为集群来报告。RSU可以找到多于一个此类VRU集群(例如,穿过交叉路口的VRU和在人行道上行走的VRU)以用于报告。一些VRU可能需要单独地报告,因为它们可能离其他VRU很远,或者它们的速度可能不同到超过了速度差阈值。一旦非VRU ITS-S确定报告一个或多个单独的感知到的VRU和/或一个或多个感知到的VRU集群,则非VRU ITS-S生成VAM并在单个iVAM中一起报告它们。
在一些情况下,VRU集群可能已经由VRU-ITS-S报告,并且非VRU ITS-S感知所报告的集群边界框内和/或边界框周围的非装配的VRU。非VRU ITS-S可以发送VAM,该VAM包括具有相同的或增加的边界框的装配的和非装配的VRU。充当集群头的VRU-ITS-S随后可能会停止发送VRU集群VAM。
3.2.2.使非VRU ITS能够在同一VAM中报告针对一个或多个VRU和/或一个或多个VRU集群的VAM内容
当前VAM能力被扩展成使非VRU ITS-S能够传送VAM。当前VAM格式(参见例如[TS103300-3])仅允许VRU ITS-S(作为单独的VRU或作为VRU集群头)发送VAM。[5]中开发了补充解决方案中的一些,以使非VRU ITS-S能够在同一iVAM中报告针对一个或多个VRU和/或一个或多个VRU集群的VRU认知内容。当前VAM能力被扩展,以使非VRU ITS-S能够在同一iVAM中报告针对一个或多个VRU和/或一个或多个VRU集群的VRU认知内容。
VamParameters DF的VruHighFrequencyContainer被改变为可选的DF。在非VRU发起的VAM的情况下,VamParameters(Vam参数)将仅具有一个DE‘BasicContainer(基本容器)’。BasicContainer包括始发站类型,始发站类型可用于标识非VRU发起的VAM。VAM的细节随后将被添加到VAM扩展DF中,如下面针对非VRU ITS-S发起的VAM所示。这将需要现有的VAM格式的最小改变。VAM扩展携载诸如所报告的总单独的VRU、所报告的总VRU集群以及在针对非VRU ITS-S发起的VAM而对VAM分段情况下的分段信息之类的信息。在VAM扩展中定义了新的DF VamParametersNonVruItsStation(Vam参数非VruIts站),以携载非VRU发起的VAM的VamParameters的其他现有的信息(例如,DF和/或DE)。针对被报告的单独的VRU和VRU集群中每一者而包括VamParametersNonVruItsStation DF。因为非VRU发起的VAM可能被分段,所以需要分段信息(Segmentation Info)。
附加地或替代地,BasicContainer被从DF vamParameters被移到DFVruAwareness(Vru认知)中。BasicContainer提供与始发ITS-S有关的信息(站类型和位置)。BasicContainer包括始发站类型,始发站类型可用于标识非VRU发起的VAM。VAM的细节随后将被添加到VAM扩展DF中,如下面针对非VRU ITS-S发起的VAM所示。这将需要现有的VAM格式的最小改变。VAM扩展携载诸如所报告的总单独的VRU、所报告的总VRU集群以及在针对非VRU ITS-S发起的VAM而对VAM分段情况下的分段信息之类的信息。在VAM扩展中定义了新的DF VamParametersNonVruItsStation,以携载非VRU发起的VAM的VamParameters的其他现有的信息(例如,DF和/或DE)。针对被报告的单独的VRU和VRU集群中每一者而包括VamParametersNonVruItsStation DF。分段信息可被添加到VruAwareness DF或VAM扩展中。很可能对非VRU发起的VAM进行分段。
附加地或替代地,BasicContainer被从DF vamParameters被移到DFVruAwareness中。BasicContainer提供与始发ITS-S有关的信息(站类型和位置)。BasicContainer包括始发站类型,始发站类型可用于标识非VRU发起的VAM。附加地,vamParameters被定义为SEQUENCE OF VamParameters(VamParameter的序列),使得对于所报告的单独的VRU或VRU集群中的每一者,可以在非VRU ITS-S发起的VAM中包括一个VamParumeters DF。分段信息可被添加到VruAwareness DF或VAM扩展中。很可能对非VRU发起的VAM进行分段。附加的DF/DE随后将被添加到VAM扩展DF中,如下面针对非VRU ITS-S发起的VAM所示。VAM扩展携载诸如所报告的总单独的VRU、所报告的总VRU集群以及在针对非VRU ITS-S发起的VAM而对VAM分段情况下的分段信息之类的信息。
附加地或替代地,新的DF‘VamParametersNonVruItsStation(Vam参数非VruIts站)’被添加到现有的VamParameters(Vam参数),并将VruHighFrequencyContainer(Vru高频容器)从强制性的改变为任选的。VamParametersNonVruItsStation仅适用于非VRU ITS-S发起的VAM。BasicContainer(基本容器)包括始发站类型,始发站类型可用于标识非VRU发起的VAM。VamParametersNonVruItsStation DF被添加用于非VRU ITS-S发起的VAM中报告的单独的VRU或VRU集群中的每一者。对于非VRU ITS-S发起的VAM的情况,VamParameters将仅具有两个DF BasicContainer和VamParametersNonVruItsStation。对于非VRU ITS-S发起的VAM,VamParameters的其他DF将被携载在VamParametersNonVruItsStation中。分段信息可被添加在VruAwareness(Vru认知)DF或VAM扩展中。如[5]所描述,很可能对非VRU发起的VAM进行分段。附加的DF/DE随后将被添加到VAM扩展DF中,如下面针对非VRU ITS-S发起的VAM所示。VAM扩展携载诸如所报告的总单独的VRU和所报告的总VRU集群的信息。
附加地或替代地,存在两种针对VamParameters的选择;一种用于VRU ITS-S发起的VAM,并且另一种用于非VRU ITS-S发起的VAM,如下所示。
3.2.3.带宽高效的非VRU ITS-S发起的VAM
由非VRU ITS报告所有检测到的VRU和/或VRU集群在某些场景中可能是非常低效的,这些场景诸如存在大量的VRU或VRU的重叠视图或VRU在始发非VRU ITS-S处的传感器的FOV中被遮挡。例如,在大型感知到的VRU和/或VRU集群的情况下,经由VAM中的现有的DF/DE进行此类报告会产生巨大的通信开销,并且还花费较长的时间来报告所有VRU和/或VRU集群,因为VAM消息可能需要被分段成多个段。在每个连续的VAM生成事件中可以传送一个段,从而花费若干个VAM生成时段来传送VAM。因此,应该针对具有大量检测到的VRU和/或VRU集群或VRU的重叠视图或FOV中VRU的遮挡的场景支持基于占用网格的带宽高效的VRU认知消息。
本文描述了由非VRU ITS-S发起的基于占用网格的带宽高效VAM,其示例如下所示。具体而言,该占用网格可用于其中大量检测到的VRU和/或VRU集群或VRU的重叠视图或FOV中的VRU的遮挡的情况。出于此目的,新的DF‘VruOccupancyGridMap(Vru占用网格图)’被提供。仅VruOccupancyGridMap可被包括在非VRU ITS-S发起的VAM中——针对具有大量检测到的VRU和/或VRU集群或VRU重叠视图或FOV中VRU遮挡的场景。VruOccupancyGridMap也可以与其他DE/DF一起作为补充信息被包括。
3.2.4.经由非VRU ITS-S发起的VAM向VRU共享集体感知信息的带宽高效机制
此外,非VRU ITS-S通过集体感知服务(CPS)经由交换集体感知信息(CPM)来对环境具有更好的感知。预期VRU不会监听CPM。然而,非VRU ITS-S可以通过添加基于占用网格/成本图的DF,经由VAM将从CPS获取的感知到的环境信息共享给VRU。分层的成本图或基于占用网格的DF要被包括在VAM中。它可以替代或补充VAM的现有DF/DE,从而节省大量的通信开销。该描述包括用于通过添加基于分层成本图或占用网格/成本图的新的DFLayeredCostMapVamContainer(分层成本图Vam容器),使得非VRU ITS-S能够经由VAM以带宽高效的方式将从CPS获取的感知到的环境信息共享给VRU的机制。DFLayeredCostMapVamContainer可以以与先前描述的方式类似的方式定义。
3.2.5.VAM扩展容器
VamExtension(Vam扩展)类型的VRU扩展容器应该携载针对非VRU ITS-S发起的VAM中报告的VRU和VRU集群中的每一个的VRU低频、VRU高频、集群信息容器、集群操作容器、运动预测容器。在非VRU ITS-S发起的VAM中,扩展附加地携载totalIndividualVruReported(所报告总单独Vru)、totalVruClusterReported(所报告总Vru集群)、VruRoadGridOccupancy(Vru道路网格占用)容器。
道路网格占用DF的类型是VruRoadGridOccupancy,并且应该提供单元是否被(另一个VRU ITS站或对象)占用或空闲的指示。该指示应由VruGridOccupancyStatusIndication(Vru占用状态指示)DE表示,并且对应的置信度值应由ConfidenceLevelPerCell(每单元置信度水平)DE给出。附加的DF/DE被包括以用于携载网格和单元大小、道路段参考ID和网格参考点
示例由表21示出。
表21
4.ITS站配置和布置
图2描绘示例ITS-S参考体系结构200。在基于ITS的实现方式中,由图2描绘的组件中的一些或全部可遵循ITSC协议,该ITSC协议基于扩展用于ITS应用的分层通信协议的OSI模型的原理。ITSC尤其包括:接入层,与OSI层1和层2相对应;联网和传输(N&T)层,与OSI层3和层4相对应;设施层,与OSI层5和层6以及OSI层7的至少某种功能相对应;以及应用层,与OSI层7中的一些或全部相对应。这些层中的每一者经由相应的接口、SAP、API和/或其他类似的连接器或接口进行互连。
应用层201提供ITS服务,并且ITS应用在应用层201内被定义。ITS应用是实现用于实现一个或多个ITS用例的逻辑的应用层实体。ITS应用利用由ITS-S提供的底层设施和通信能力。每个应用可以被分派至三个所标识的应用类中的一个应用类:道路安全性、交通效率以及其他应用(参见例如,[EN302663])、ETSI TR 102 638版本1.1.1(2009年6月)(此后称为“[TR102638]”))。ITS应用的示例可包括驾驶辅助应用(例如,用于协作认知和道路危险警告),包括AEB、EMA和FCW应用、速度管理应用、绘图和/或导航应用(例如,逐向导航和协作导航)、提供基于位置的服务的应用、以及提供联网服务(例如,全球因特网服务和ITS-S生命周期管理服务)的应用。V-ITS-S 110向交通工具驾驶员和/或乘客提供ITS应用,并且可要求用于从车载网络或车载系统访问车载数据的接口。出于部署和性能需要,V-ITS-S110的特定实例可包含对应用和/或设施的分组。
设施层202包括中间件、软件连接器、软件粘合件等等,包括多种设施层功能(或简称为“设施”)。具体而言,设施层包含来自OSI应用层的功能、来自OSI呈现层的功能(例如,ASN.1编码和解码、以及加密)以及来自OSI会话层的功能(例如,主机间通信)。设施是向应用层中的应用提供功能、信息和/或服务并与较低层交换数据以用于就该数据与其他ITS-S进行通信的组件。示例设施包括协作认知服务、集体感知服务、设备数据提供方(DeviceData Provider,DDP)、位置和时间管理(Position and Time management,POTI)、本地动态地图(Local Dynamic Map,LDM)、合作认知基本服务(collaborative awareness basicservice,CABS)和/或协作认知基本服务(cooperative awareness basic service,CABS)、信号相位和定时服务(signal phase and timing service,SPATS)、易受伤害道路使用者基本服务(vulnerable road user basic service,VBS)、分散式环境通知(DecentralizedEnvironmental Notification,DEN)基本服务、操纵协调服务(maneuver coordinationservice,MCS)等等。对于交通工具ITS-S,DDP与车载网络连接并且提供交通工具状态信息。POTI实体提供ITS-S的位置并提供时间信息。由ETSI TS 102 894-1版本1.1.1(2013年8月)(此后称为“[TS102894-1]”)给出共同设施的列表。
前述接口/服务接入点(Service Access Point,SAP)中的每一者可利用设施层提供对数据的全双工交换,并且可实现合适的API来实现各种实体/元件之间的通信。
对于交通工具ITS-S,设施层202经由如[TS102894-1]中示出和描述的车载数据网关连接至车载网络。交通工具ITS-S的设施和应用从数据网关接收所要求的车载数据,以便构造消息(例如,CSM、VAM、CAM、DENM、MCM和/或CPM)并用于应用使用。对于发送和接收CAM,CA-BS包括以下实体:编码CAM实体、解码CAM实体、CAM传送管理实体、以及CAM接收管理实体。对于发送和接收DENM,DEN-BS包括以下实体:编码DENM实体、解码DENM实体、DENM传送管理实体、DENM接收管理实体、以及DENM保持存活转发(keep-alive forwarding,KAF)实体。CAM/DENM传送管理实体实现始发ITS-S的协议操作,包括CAM/DENM传送操作的激活和终止、确定CAM/DENM生成频率、以及触发CAM/DENM的生成。CAM/DENM接收管理实体实现接收方ITS-S的协议操作,包括:在接收CAM/DENM时触发解码CAM/DENM实体,将接收到的CAM/DENM数据供应至接收方ITS-S的LDM、设施或应用,丢弃无效的CAM/DENM,以及检查接收到的CAM/DENM的信息。DENM KAF实体KAF在接收到的DENM的有效性持续时间期间存储接收到的DENM,并在可适用时转发该DENM;DENM KAF的使用条件可由ITS应用要求来定义或由ITS管理实体206的跨层功能来定义。编码CAM/DENM实体构造(编码)CAM/DENM以包括各种CAM/DENM,对象列表可包括ITS数据字典中所要求的DE和/或DF的列表。
ITS站类型/能力设施提供用于描述要在应用层和设施层中使用的ITS-S的简档的信息。该简档指示ITS-S类型(例如,交通工具ITS-S、路边ITS-S、个人ITS-S或中央ITS-S)、ITS-S的角色以及检测能力和状态(例如,ITS-S的定位能力、感测能力等)。站类型/能力设施可存储各个连接的/耦合的传感器的传感器能力以及从此类传感器获得的传感器数据。图2示出了特定于VRU的功能,包括映射到ITS-S体系结构的接口。特定于VRU的功能以位于设施层的VRU基本服务(VBS)221为中心,该特定于VRU的功能消费来自其他设施层服务(诸如位置和时间管理(PoTi)222、本地动态地图(LDM)223、HMI支持224、DCC-FAC 225、CA基本服务(CA basic service,CBS)226等)的数据。PoTi实体222提供ITS-S的位置并提供时间信息。LDM 223是ITS-S中的数据库,除了机载传感器数据之外,还可以利用所接收的CAM和CPM数据进行更新(参见例如,ETSI TR 102 863版本1.1.1(2011年06月))。通过对DCC-FAC实体225提供接口来接收与当前信道利用率相关的特定于消息散播的信息。DCC-FAC 225向VBS221提供接入网络拥塞信息。
位置和时间管理实体(PoTi)222管理用于由ITS应用层、设施层、网络层、管理层和安全层使用的位置和时间信息。出于此种目的,PoTi 222从诸如GNSS、传感器和ITS-S的其他子系统之类的子系统实体得到信息。PoTi 222确保ITS星座中的ITS-S之间的时间同步性,维护数据质量(例如,通过监测时间偏差),并且管理位置(例如,运动学和姿态状态)和时间的更新。ITS星座是在其自身之间交换ITS数据的ITS-S的群组。PoTi实体222可包括用于改善位置和时间准确性、完整性和可靠性的增强服务。在这些方法之间,通信技术可用于提供从移动ITS-S到移动ITS-S以及从基础设施到移动ITS-S的定位辅助。考虑到位置和时间准确性方面的ITS应用要求,PoTi 222可使用增强服务来改善位置和时间准确性。可应用各种增强方法。PoTi 222可通过提供广播增强数据的消息服务来支持这些增强服务。例如,路边ITS-S可向即将到来的交通工具ITS-S广播针对GNSS的纠正信息;ITS-S可交换原始GPS数据或者可交换陆地无线电位置和时间相关信息。PoTi 222根据ITS-S中的应用层、设施层以及其他层服务要求来维护和提供位置和时间参考信息。在ITS的情境中,“位置”包括姿态和移动参数,包括速度、航向、水平速度,并且任选地包括其他参数。ITS-S中所包含的刚性主体的运动学和姿态状态包括位置、速度、加速度、定向、角速度、以及可能的其他运动相关信息。特定时刻的位置信息被称为刚性主体的包括时间的运动学和姿态状态。除了运动学和姿态状态之外,PoTi 222还应当维护与运动学和姿态状态变量的置信度有关的信息。
VBS 221还与其他实体进行链接,其他实体诸如应用支持设施,包括例如合作/协作认知基本服务(CABS)、信号相位和定时服务(SPATS)、分散式环境通知(DEN)服务、集体感知服务(CPS)、操纵协调服务(MCS)、基础设施服务212等。VBS 221负责传送VAM,标识VRU是否是集群的一部分,并实现对潜在碰撞风险的评定。VBS 221还可以与管理层中的VRU简档管理实体交互,以实现与VRU相关的目的。
VBS 221通过网络-传输/设施(Network-Transport/Facility,NF)-服务接入点(SAP)对N&T提供接口,用于与其他ITS-S交换CPM。VBS 221通过安全-设施(Security–Facility,SF)-SAP对安全实体提供接口,以访问针对VAM传送和VAM接收303的安全服务。VBS 221通过管理-设施(Management-Facility,MF)-SAP对管理实体提供接口,并通过设施-应用(Facility–Application,FA)-SAP对应用层提供接口(如果接收到的VAM数据直接被提供给应用的话)。前述接口/SAP中的每一者可利用设施层提供对数据的全双工交换,并且可实现合适的API来实现各种实体/元件之间的通信。
VBS模块/实体221驻留在设施层中和/或在设施层中操作,生成VAM,检查相关的服务/消息,以与ITS-S内的其他设施和/或其他实体生成的其他ITS服务消息结合来协调对VAM的传送,VAM随后被传递到N&T层和接入层,以便传送到其他邻近的ITS-S。VAM被包括在ITS分组中,这些ITS分组是设施层PDU,可经由N&T层传递到接入层,或者被传递到应用层以供一个或多个ITS应用来消费。这样,VAM格式对底层接入层是不可知的,并且VAM格式被设计成允许共享VAM,而不管底层接入技术/RAT如何。
应用层基于对VRU用例的分析来推荐保护VRU 116会涉及的功能实体的可能分布。应用层还包括设备角色设置功能/应用(app)211、基础设施服务功能/应用212、操纵协调功能/应用213、协作感知功能/应用214、远程传感器数据融合功能/应用215、碰撞风险分析(collision risk analysis,CRA)功能/应用216、碰撞风险避免功能/应用217以及事件检测功能/应用218。
设备角色设置模块211采取配置参数设置和用户偏好设置,并且根据参数设置、用户偏好设置和/或其他数据(例如,传感器数据等)启用/禁用不同的VRU简档。VRU可以装配有便携式设备,该便携式设备需要进行初始地配置,并可能在其操作期间随着需要指定的情境改变而演变。这对于可以在通电时自动地实现的或经由HMI实现的对VRU简档和VRU类型的设置而言尤其成立。道路使用者的易损性状态的改变也需要被提供,从而在道路使用者变得易受伤害时激活VBS 221,或者在道路使用者进入受保护区域时停用VBS 221。初始配置可以在设备上电时自动地设置。这可以是针对VRU装备类型的情况,该VRU装备类型可以是:VRU-Tx(VRU仅具有在符合信道拥塞控制规则的情况下对消息进行广播的通信能力);VRU-Rx(VRU仅具有对消息进行接收的通信能力);和/或VRU-St(VRU具有完整的双工(Tx和Rx)通信能力)。在操作期间,VRU简档也可由于某种聚类或拆解而改变。因此,VRU设备角色将能够根据VRU简档改变而演变。
基础设施服务模块212负责发起新的VRU实例化、收集使用数据和/或消费来自基础设施站的服务。现有的基础设施服务212(诸如以下所述的那些)可以在VBS 221的情境中使用:
对SPAT(信号相位和定时)和MAP(SPAT相关性界定的区域(SPAT relevancedelimited area))的广播已经标准化,并由交通工具在交叉路口级使用。原则上,它们保护VRU 116穿过。然而,信号灯违反警告可能存在,并且可被检测到并使用DENM来发出信号。此类使用DENM的信号灯违反指示与VRU设备非常相关,因为该信号灯违反指示指示与违反信号灯的交通工具发生碰撞的风险增加。如果它使用本地捕获器或检测和分析VAM,则交通灯控制器可以延迟红色阶段改变为绿色,并允许VRU安全地终止其道路穿过。
当检测到大型VRU 116集群时,使用IVI(交通工具内信息)的情境速度限制可以被适配(例如:将交通工具的速度限制在30公里/小时)。在此类降低的速度下,交通工具在借助于其自身的本地感知系统感知到VRU 116时可以高效地进行动作。
在一些实现方式中还包括远程传感器数据融合和致动器应用/功能215(包括ML/AI)。通过计算由本地传感器收集到的数据而获得的本地感知数据可以通过由VRU系统的元件(例如,VRU系统117、V-ITS-S 110、R-ITS-S 130)经由ITS-S收集到的远程数据来增强。这些远程数据使用标准服务(诸如CPS等)进行传输。在此类情况下,对这些数据进行融合可能是必要的。在一些实现方式中,数据融合可以提供至少三种可能的结果:(i)在数据一致性检查之后,接收到的远程数据与本地数据不一致,其中系统元件必须决定哪个数据源可以被信任并且忽略另一数据源;(ii)仅一个输入是可用的(例如远程数据),这意味着其他源不具有提供信息的可能性,其中系统元件可以信任唯一可用的源;以及(iii)在数据一致性检查之后,两个源提供增强所提供的各个输入的一致的数据。使用ML/AI对于对检测到的对象(例如,VRU、摩托车、交通工具类型等)以及它们的相关联的动力学进行识别和分类可能是必要的。AI可以位于VRU系统的任何元件中。同样的方法可适用于致动器,但在该情况下,致动器是数据融合的目的地。
集体感知(CP)涉及ITS-S彼此共享与其当前环境有关的信息。参与CP的ITS-S广播与其当前(例如,驾驶)环境有关的信息,而不是与其自身有关的信息。出于此种目的,CP涉及不同的ITS-S借助一种或多种V2X RAT主动交换由本地感知传感器检测到的本地感知到的对象(例如,其他道路参与者和VRU 116、障碍物等)。在一些实现方式中,CP包括感知链,该感知链可以是若干感知功能在预定义的时间的结果的融合。这些感知功能可以包括本地感知功能和远程感知功能。
本地感知是通过从所考虑的ITS元件(例如,VRU设备、交通工具、基础设施等)的环境中收集信息来提供的。该信息收集是使用相关的传感器(光学相机、热相机、无线电检测与测距(radar)、光检测与测距(LIDAR)等)实现的。远程感知是通过经由C-ITS(主要是V2X通信)供应感知数据来实现的。现有的基本服务(如协作认知(Cooperative Awareness,CA)或更新近的服务(诸如集体感知服务(CPS))可用于传输远程感知。
然后可以使用若干个感知源来实现协作感知功能214。这些源的一致性可在预定义的时刻被验证,并且如果不一致,则CP功能可根据与每个感知变量相关联的置信度水平选择最佳的源。CP的结果应符合由PoTi指定的所需的准确性级别。在本地感知与远程感知之间存在差异的情况下,关联的置信度水平对于建立根据融合得到的CP可能是必要的。它对于由其他功能(例如风险分析)利用该CP结果可能也是必要的。
从设备本地传感器处理到协作感知214级别下的最终结果的感知功能可能会出现几百毫秒的显著的等待时间。为了表征VRU轨迹及其速度演变,需要一定数量的交通工具位置测量和速度测量,因此增加感知的总等待时间。因此,估计该功能的总延迟时间以便在选择碰撞避免策略时将其考虑在内是必要的。
CRA功能216分析所考虑的移动对象的、与它们相应置信度(可靠性)水平相关联的运动动力学预测。目的在于估计碰撞的可能性,并且随后在得到的可能性很高的情况下尽可能精确地标识碰撞时间(Time To Collision,TTC)。其他变量可用于计算该估计。
假设输入数据具有足够的质量,则VRU CRA功能216和动力学状态预测能够以可接受的置信度水平可靠地预测相关道路使用者操纵,以用于触发适当的碰撞避免动作的目的。CRA功能216基于对相应动力学状态演变的可靠预测来分析碰撞风险的水平。因此,可靠性水平方面可以根据如[TS103300-2]的第6.5.10.5款和第6.5.10.9款中所讨论的所选择的碰撞风险度量的置信度水平来表征。VRU动力学状态预测的置信度是出于风险分析的目的而计算的。VRU的动力学状态的预测是复杂的,对于一些特定的VRU简档(例如,动物、儿童、残疾人等)尤其如此。因此,如[TS103300-2]的第6.5.10.5款、第6.5.10.6款和第6.5.10.9款所解释的,可以将置信度水平与这种预测相关联。当以足够的置信度检测到涉及VRU的碰撞风险时,VRU移动可靠预测被用来触发对相关VAM的广播,以避免假肯定警报(参见例如[TS103300-2]的第6.5.10.5款、第6.5.10.6款和第6.5.10.9款)。
以下两个条件用于计算TTC。第一,两个或更多个所考虑的移动对象遵循在某个位置相交的轨迹,该位置可称为“潜在冲突点”。第二,如果移动对象维持其运动动力学(例如,接近、轨迹、速度等),则预测它们将在给定的时间发生碰撞是可能的,该给定的时间可以通过计算它们同时到达所标识的潜在冲突点的级别必要的时间(称为碰撞时间(TTC))来估计。TTC是使得能够选择要采取的碰撞避免动作的性质和紧急性的所计算出的数据元素。
仅当VRU 116进入碰撞风险区域时,才可以可靠地建立TTC预测。这是由于在决定穿过道路之前,VRU行人运动动力学(主要是其轨迹)的不确定性性质。
在潜在冲突点级别下,另一个测量(“行人和交通工具行进到潜在冲突点的时间差”(TDTC))可以用来估计碰撞风险级别。例如,如果它没有作用于行人的运动动力学或/和作用于交通工具的运动动力学,则TDTC等于0并且碰撞是肯定的。增加TDTC降低了VRU与交通工具之间的碰撞风险。潜在冲突点在碰撞风险区域的中间,碰撞风险区域可以根据车道宽度(例如3.5米)和交通工具宽度(对于客车最大2米)来限定。
TTC是可用于定义碰撞避免策略和要采取的可操作的碰撞避免动作的变量中的一个变量。可以考虑其他变量,诸如道路状态、天气状况、三元组{纵向距离(LoD)、横向距离(LaD)、垂直距离(VD)}以及对应阈值三元组{MSLaD、MSLoD、MSVD}、轨迹拦截指示符(Trajectory Interception Indicator,TII)以及移动对象对碰撞风险做出反应和避免碰撞的能力(参见例如,[TS103300-2]中的第6.5.10.9款)。TII是VRU 116和一个或多个其他VRU 116、非VRU、或甚至道路上的对象将发生碰撞的可能性的指示符。
CRA功能216将LaD、LoD和VD分别与它们相应的预定义阈值MSLaD、MSLoD、MSVD进行比较,如果所有三个度量同时小于它们相应的阈值(即LaD<MSLaD,LoD<MSLoD,VD<MSVD),那么将发起碰撞避免动作。可以根据交通工具和VRU 116的速度、加速度、类型和负载,以及环境和天气状况周期性地或动态地设置和更新这些阈值。另一方面,TII反映自我VRU ITS-S 117轨迹被相邻ITS(其他VRU 116和/或非VRU ITS,诸如交通工具110)拦截的可能性有多大。
与TTC相关联的碰撞的可能性也可以被用作对消息进行广播的触发条件(例如,取得对情形的完整感知的基础设施元件可以广播DENM、IVI(情境速度限制)、CPM或MCM)。
碰撞风险避免功能/应用217包括要根据TTC值选择的碰撞避免策略。在自主交通工具110的情况下,碰撞风险避免功能217可能涉及对操纵协调213/交通工具运动控制608的标识,以根据由TII捕获的与其他道路使用者的VRU轨迹拦截的可能性和操纵标识符(MI)实现碰撞避免,如下文所讨论。
碰撞避免策略可以考虑若干环境状况,诸如与当地天气相关的能见度状况、与道路状态(例如湿滑)相关的交通工具稳定性状况以及交通工具制动能力。然后,交通工具碰撞避免策略需要根据VRU的简档、剩余的TTC、道路和天气状况以及交通工具自主动作能力来考虑其动作能力。碰撞避免动作可以使用操纵协调213(和相关的操纵协调消息(MCM)交换)来实现,正如在法国PAC V2X项目或其他类似系统中所做的那样。
在一个示例中,当处于良好状况时,当TTC大于两秒(一秒用于驾驶员反应时间,以及一秒用于实现碰撞避免的动作)时,触发碰撞避免动作是可能的。低于两秒的情况下,交通工具可以被认为处于“预碰撞”情形,并且因此其需要触发缓解动作,以降低VRU 116/117的碰撞冲击的严重性。[TS103300-2]的第5款中的FSYS08要求中列出了可能的碰撞避免动作和冲击缓解动作。
道路基础设施元件(例如,R-ITS-S 130)还可以包括CRA功能216以及碰撞风险避免功能217。这些功能可以向相邻的VRU 116/117和交通工具110指示碰撞避免动作。
VRU、V-ITS-S 110和/或R-ITS-S 130的避免碰撞动作(例如,正如在法国PAC V2X项目中所做的那样使用MCM)可能取决于交通工具自动化级别。避免碰撞动作或冲击缓解动作是作为对驾驶员的警告/警报或作为对交通工具110本身的直接动作而触发的。避免碰撞的示例包括以下各项的任何组合:延长或改变交通灯的阶段;如果交通工具110具有足够的自动化级别,则对交通工具110的轨迹和/或速度进行动作(例如,减速、改变车道等);通过HMI对ITS设备用户进行警报;向其他道路使用者散播C-ITS消息,这些其他道路使用者包括VRU 116/117(如果相关的话)。冲击缓解动作的示例可以包括以下各项的任何组合:在交通工具级触发保护装置(例如,扩展的外部安全气囊);触发便携式VRU保护气囊。
道路基础设施可以提供支持VRU穿过道路的服务,诸如交通灯。当VRU在授权他的交通灯级别下开始穿过道路时,只要VRU尚未完成其穿过,交通灯就不应该改变阶段。因此,VAM应该包含使交通灯能够确定VRU 116/117穿过道路结束的数据元素。
操纵协调功能213执行与已经决定(和选择)的碰撞避免策略相关联的碰撞避免动作。取决于VRU采取动作的能力(例如VRU简档和类型)、交通工具类型和能力以及实际的碰撞风险,在VRU 116/117级、在交通工具110级、或既在VRU 116/117级又在交通工具110级触发碰撞避免动作。VRU 116/117并不总是有能力采取动作来避免碰撞(例如,动物、儿童、老年人、残疾人等),如果TTC很短(几秒钟)则尤其如此(例如,参见[TS103300-2]的第6.5.10.5款和第6.5.10.6款)。该功能应该存在于交通工具110级,这也取决于交通工具110的自动化级别(例如,不存在于非自动化交通工具中),并且根据VRU简档可能存在于VRU设备117级。在交通工具110级,该功能对在航向和速度方面控制交通工具动力学状态的交通工具电子装置提供接口。在VRU设备117级,该功能可以根据VRU简档对HMI支持功能提供接口,以便能够根据TTC向VRU116/117发出警告或警报。
可以从基础设施元件向交通工具提出操纵协调213,该基础设施元件可能能够借助于其自身的传感器或通过其数据与从标准消息(诸如CAM)获得的远程感知的融合,获得对所涉及的移动对象的运动动力学的更好感知。
在VRU 116处的操纵协调213可以通过在自我VRU与相邻ITS之间共享以下各项来实现:第一,反映自我VRU ITS-S 117轨迹将被相邻ITS(其他VRU或非VRU ITS,诸如交通工具)拦截的可能性的TII;以及第二,用于指示所需的VRU操纵的类型的操纵标识符(Maneuver Identifier,MI)。MI是(要)在操纵协调服务(MCS)213中使用的操纵的标识符。操纵的选择可以基于VRU ITS-S 117处的可用传感器数据来在本地生成,并且可以与在自我VRU ITS-S 117附近区域中的相邻ITS-S(例如,其他VRU 116和/或非VRU)共享,以发起VRU 116之间的联合操纵协调(例如,参见[TS103300-3]的第6.5.10.9款)。
根据在传感以及共享输入方面对场景的分析,可以定义简单的TII范围以指示自我VRU 116的路径被另一实体拦截的可能性。此类指示有助于触发及时操纵。例如,TII可以根据TII索引来定义,该TII索引可以简单地指示潜在轨迹拦截的几率(低、中等、高或非常高),以用于CRA 216。如果存在多个其他实体,则TII可以针对经由简单的ID可区分的特定的实体进行指示,这取决于当时附近区域中同时存在的实体的数量。附近区域甚至可以只是当前VRU所位于的集群。例如,集群中的实体或用户的最小数量是每集群50个(最坏情况)。然而,可能具有与VRU发生碰撞的可能性的一组用户可能远少于50,因此经由比如说VAM中的几个比特来指示是可能的。
在另一方面,MI参数可以通过触发/建议在VRU 116/117处需要的操纵动作类型而有助于碰撞风险避免217。此类可能的操纵动作的数量可能仅有几个。为简单起见,它也可以定义为可从{纵向轨迹改变操纵、横向轨迹改变操纵、航向改变操纵或紧急制动/减速}中选择的可能动作,以便避免由TII指示的潜在碰撞。TII和MI参数也可以经由包含在VAM DF结构的一部分中来交换。
当从一个状态转变到另一个状态时,事件检测功能218在其操作期间辅助VBS221。要考虑的事件的示例包括:当道路使用者变得易受伤害(激活)或当道路使用者不再易受伤害(停用)时,VRU角色的改变;当VRU进入具有(一个或多个)其他VRU或新的机械元素(例如,自行车、滑板车、摩托车等)的集群时或当VRU集群正在拆解时,VRU简档的改变;一个或若干个VRU与(使用VRU交通工具的)至少一个其他VRU或交通工具之间的碰撞的风险(经由VRU系统的感知能力检测到此类事件);将影响TTC和先前预测的可靠性的VRU运动动力学(轨迹或速度)的改变;以及影响VRU移动的道路基础设施装备件的状态(例如,交通灯阶段)的改变。
附加地或替代地,现有的基础设施服务212(诸如本文所描述的那些服务)可以在VBS 221的情境中使用。例如,信号相位和定时(Signal Phase And Timing,SPAT)和SPAT相关性界定的区域(MAP)的广播已经被标准化,并被交通工具在交叉口级使用。原则上,它们保护VRU 116/117穿过。然而,信号灯违反警告可能存在,并且可被检测到并使用DENM来发出信号。这种使用DENM的信号灯违反指示与VRU设备117非常相关,因为其指示与违反信号灯的交通工具发生碰撞的风险增加。如果它使用本地捕获器或检测和分析VAM,则交通灯控制器可以延迟红色阶段改变为绿色,并允许VRU 116/117安全地终止其道路穿过。当检测到大型VRU 116/117集群时,使用车载信息(IVI)的情境速度限制可以被适配(例如,将交通工具的速度限制在30公里/小时)。在此类降低的速度下,交通工具110在借助于其自身的本地感知系统感知到VRU时可以高效地进行动作。
ITS管理(mgmnt)层包括VRU简档管理实体。VRU简档管理功能是VBS221的重要支持要素,因为其在VRU活跃会话期间管理VRU简档。简档管理是ITS-S配置管理的一部分,并且随后利用必要的典型参数的值进行初始化,以使得能够完成其操作。ITS-S配置管理也负责在系统的整个生命周期期间必要的更新(例如:新的标准版本)。
当VBS 221被激活(易损性被配置)时,VRU简档管理需要基于其经验和基于所提供的初始配置(通用VRU类型)来表征VRU的个性化简档。然后,VRU简档管理可以继续学习VRU习惯和行为,目的在于增加与它的运动动力学(轨迹和速度)相关联以及与它的演变预测相关联的置信度(可靠性)水平。
VRU简档管理261能够根据可由VBS管理和VRU集群管理302(集群建立/形成或集群拆解/解散)发信号的检测到的事件来适配VRU简档。
根据其简档,VRU可能会或可能不会受到一些道路基础设施事件(例如,交通灯阶段的演变)的影响,从而实现具有与它的移动相关联的置信度水平的更好的估计。例如,成年行人可能会在绿色交通灯下等待,并且随后在交通灯变为红色时穿过道路。动物不会注意交通灯颜色,并且儿童可能根据其年龄和教育水平而等待或不等待。
图3示出示例VBS功能模型300。VBS 221是操作VAM协议的设施层实体。它提供三种主要服务:处置VRU角色、发送和接收VAM。VBS使用ITS联网和传输层的协议实体所提供的服务来散播VAM。在一些实现方式中,虚线/实线框的存在/不存在取决于VRU装备类型是VRU-Tx、VRU-Rx还是VRU-St(例如,参见[TS103300-2])。
在其他功能(在本公开的范围内)中被简要地总结如下。
1.VBS(服务)管理301:负责根据设备角色参数激活或停用VAM传送,以及管理VAM传送的触发条件。
2.VRU集群管理302:用于管理经组合的和经聚类的VRU创建和分解。
3.VAM接收管理303:在VAM消息解码后,检查Rx消息的相关性、一致性、合理性、完整性等,并在本地动态地图(local dynamic map,LDM)中存储或删除Rx消息数据元素。
4.VAM传送管理304:组装VAM DE,并发送至编码功能。
5.VAM编码305:对来自VAM Tx管理功能的VAM DE进行编码,并触发至联网和传输层的VAM传送(该功能仅在支持VRU-ITS-S VRU-Rx的情况下存在)。
6.VRU解码306:在接收到的VAM中提取相关的DE(该功能仅在支持VRU-ITS-S VRU-Rx的情况下存在),并将其发送给接收管理功能。
处置VRU角色:VBS 221从VRU简档管理实体(例如,参见[TS103300-2]中的第6.4款)接收关于设备用户是否处于其被视为VRU(例如,穿过道路的行人)或不是VRU(例如,巴士中的乘客)的情境中的主动提供的指示。如表21所定义,VBS 221在这两种状态下都保持运行。
表21:VRU在VRU基本服务操作期间的可能角色
可能存在其中VRU简档管理实体提供无效的信息(例如,VRU设备用户被视为VRU,而其角色应该是VRU_角色_关)的情况。这依赖于实现方式,因为接收方ITS-S应该具有非常强的真实性检查,并在其风险分析期间考虑VRU情境。定位系统的精度(在传送侧和接收侧)也会对此类情况的检测具有强烈影响。
发送VAM包括两项活动:VAM的生成和VAM的传送。在VAM生成中,始发ITS-S 117组成VAM,VAM随后被递送给ITS联网和传输层以供散播。在VAM传送中,VAM使用一个或多个传输和联网协议通过一个或多个通信介质来传送。自然的模式是针对要由始发ITS-S发送至直接通信范围内的所有ITS-S的VAM。VAM以由始发ITS-S中的控制VBS 221确定的频率生成。如果VRU ITS-S不处于集群中,或者是集群的领导者,则它周期性地传送VAM。处于集群中但不作为集群的领导者的VRU ITS-S 117不传送VAM。生成频率基于运动学状态的改变、VRUITS-S 117的位置和无线电信道的拥塞来确定。在传送过程期间,安全措施(诸如认证)与安全实体协调地应用于VAM。
在接收到VAM后,VBS 221使VAM的内容可用于ITS应用和/或可用于接收方ITS-S117/130/110内的其他设施,诸如本地动态地图(Local Dynamic Map,LDM)。它与安全实体协调地应用所有必要的安全措施,诸如相关性或消息完整性检查。
VBS 221包括VBS管理功能301、VRU集群管理功能302、VAM接收管理功能303、VAM传送管理功能304、VAM编码功能305和VAM解码功能306。这些功能中的一些或全部的存在取决于VRU装备类型(例如,VRU-Tx、VRU-Rx或VRU-St),并且可能取决于用例和/或设计选择而有所不同。
VBS管理功能301执行以下操作:存储所分派的ITS AID和所分派的网络端口以用于VBS 221;存储在初始化时接收到的或稍后更新的VRU配置以用于VAM数据元素的编码;从HMI接收信息以及向HMI传送信息;根据设备角色参数激活/停用VAM传送服务304(例如,当行人进入公共汽车时停用该服务);以及管理与网络拥塞控制相关的VAM传送304的触发条件。例如,在激活新的集群之后,可以决定停止对集群的(一个或多个)元素的传送。
VRU集群管理功能302执行以下操作:检测相关联的VRU是否可以作为集群的领导者;在激活时计算和存储集群参数,以用于对特定于集群的VAM数据元素的编码;根据检测到的集群事件管理与VRU相关联的状态机(参见例如,[TS103300-2]的第6.2.4节中提供的状态机示例);以及根据相关联的VRU的状态和类型激活或停用对VAM或其他标准消息(例如,DENM)的广播。
作为VBS 221的一部分,聚类操作旨在优化ITS系统中的资源使用。这些资源主要是频谱资源和处理资源。
某个区域中的大量VRU(城市环境中穿过的行人、城市环境中的大型广场、特殊事件(如大量行人聚集))会导致VRU ITS-S发出大量的单独的消息,并且因此导致对频谱资源的显著需求。附加地,所有这些消息都需要由接收方ITS-S来处理,潜在地包括安全操作的开销。
为了减少此种资源使用,本文档指定聚类功能。VRU集群是具有同构行为的VRU的群组(参见例如,[TS103300-2]),其中与VRU集群相关的VAM提供与整个集群有关的信息。在VRU集群内,VRU设备扮演领导者(每个集群一个)或成员的角色。领导者设备发送包含集群信息和/或集群操作的VAM。成员设备发送包含集群操作容器的VAM,以加入/离开VRU集群。成员设备在任何时间都不发送包含集群信息容器的VAM。
集群可能包含多个简档的VRU设备。如果集群仅包含一个简档的设备,则被称为“同构”;如果它包含多于一个简档的VRU设备(例如,行人和骑自行车者的混合群组),则被称为“异构”。VAM ClusterInformationContainer(集群信息容器)包含允许集群容器指示集群中存在哪些VRU简档的字段。指示异构集群是重要的,因为当集群被分解时,它提供了与轨迹和行为预测有关的有用信息。
对于所有的VRU简档来说,在VBS 221中,对聚类功能的支持是任选的。对所有的VRU简档来说,支持聚类或不支持聚类的决策是依赖于实现方式的。当条件被满足时(参见[TS103300-3]的第5.4.2.4款),对于VRU简档1来说推荐支持聚类。支持聚类的实现方式还可以允许设备所有者通过配置来激活或不激活它。该配置也依赖于实现方式。如果在VRU设备中支持并激活聚类功能,并且仅在该情况下,VRU ITS-S应遵守[TS103300-3]的第5.4.2款和第7款中指定的要求,并定义[TS103300-3]的第5.4.3款中指定的参数。因此,在本文档中,集群参数被分组在两个特定且有条件的强制性容器中。
要作为VBS 221中的VRU集群管理302的一部分来被执行的基本操作是:集群标识:在自组织(Ad-Hoc)模式下由集群参与者进行集群内标识;集群创建:创建包括位于附近并且具有类似预期方向和速度的VRU设备的VRU集群。集群创建操作的细节在[TS103300-3]的第5.4.2.2款中给出;集群分解:当集群不再参与安全性相关的交通或基数下降到低于给定的阈值时解散集群;集群加入和离开:进入集群操作,向现有集群添加或删除单独的成员;集群扩展或收缩:增加或减少大小(区域或基数)的操作。
任何VRU设备应最多领导一个集群。因此,在开始加入另一个集群之前,集群的领导者应将其集群分解。该要求也适用于[TS103300-2]中定义的加入不同集群的经组合的VRU(例如,在通过人行横道时)。然后,经组合的VRU可以在离开异构集群后根据需要被重新创建。例如,如果当前与他的自行车(该自行车也具有VRU设备)处于经组合的集群中的具有VRU设备的骑自行车者检测到其可以加入更大的集群,那么经组合的VRU的领导者就会分解集群,并且两个设备各自单独地加入更大的集群。在VRU集群内部包括或合并VRU集群或经组合的VRU的可能性留待进一步研究。在一些实现方式中,简单的带内VAM信令可用于VRU聚类的操作。可以定义进一步的方法来建立、维护和撕毁设备之间的关联(例如,
VRU基本服务和ITS-S体系结构中的其他设施层实体之间的交互被用来获得用于生成VAM的信息。用于这些交互的接口在表22中被描述。IF.OFa(与其他设施的接口)依赖于实现方式
表22:VRU基本服务接口(IF.OFa)
对于VRU集群操作,取决于其情境,VBS 221处于表23中指定的集群状态中的一种。除了[TS103300-3]第6款中定义的正常VAM触发条件之外,先前讨论的事件还可以触发与集群操作相关的VBS状态转变。[TS103300-3]的第8款表14和表15和/或上文的表5和表6中总结了控制这些事件的参数。
表23:与集群操作相关的VRU基本服务的可能状态
在所有VBS状态下,VRU设备中的VRU基本服务均应保持运行。
VAM接收管理功能303在VAM消息解码后执行以下操作:根据其当前的移动性特性和状态检查所接收的消息的相关性;检查所接收的消息语义的一致性、真实性和完整性(参见与安全协议的联系);以及根据先前的操作结果破坏所接收的消息数据元素或将所接收的消息数据元素存储在LDM中。
VAM传送管理功能304仅在VRU设备级可用,而不是在其他ITS元件(诸如V-ITS-S110或R-ITS-S 130)级可用。即使在VRU设备级,该功能也可能取决于其初始配置(参见设备角色设置功能211)而不存在。VAM传送管理功能304在VBS管理功能301的请求时执行以下操作:按照消息标准规范组装消息数据元素;以及将所构建的VAM发送给VAM编码功能305。VAM编码功能305按照VAM规范对由VAM传送管理功能304提供的数据元素进行编码。只有在VAM传送管理功能304可用的情况下,VAM编码功能305才是可用的。
VAM解码功能306提取包含在所接收的消息中的相关数据元素。这些数据元素随后被传递给VAM接收管理功能303。只有在VAM接收管理功能303可用的情况下,VAM解码功能306才是可用的。
VRU可以利用VRU简档来进行配置。VRU简档是对VRU功能体系结构的进一步定义的基础。这些简档源自于本文讨论的各个用例。VRU 116通常是指生物。仅在处于与安全性相关的交通环境的情境中时,生物才被视为是VRU。例如,房子中的生物不是VRU,直到其处于街道的附近区域中(例如2米或3米),在这一点处,其成为安全性相关情境的一部分。这允许限制通信量,例如,C-ITS通信设备仅需要在与其相关联的生物开始以VRU的角色进行动作时开始充当VRU-ITS-S。
VRU可以装配有便携式设备。除非上下文另有指示,否则术语“VRU”可用于指代VRU及其VRU设备两者。VRU设备可在最初被设置并且可在其操作期间遵循需要被指定的情境改变而演变。这对于可以在通电时自动地实现的或经由HMI实现的、对VRU简档和VRU类型的设置而言尤其成立。道路使用者的易损性状态的改变也需要被提供,从而在道路使用者变得易受伤害时激活VBS,或者在道路使用者进入受保护区域时停用VBS。初始配置可以在设备上电时自动地设置。这可以是针对VRU装备类型的情况,该VRU装备类型可以是:VRU-Tx,仅具有对消息进行广播的通信能力并且符合信道拥塞控制规则;VRU-Rx,仅具有对消息进行接收的通信能力;和/或VRU-St,具有完整的双工通信能力。在操作期间,VRU简档也可由于某种聚类或拆解而改变。因此,VRU设备角色将能够根据VRU简档改变而演变。
以下简档分类参数可用于对不同的VRU 116进行分类:
·最大和平均(例如,典型)速度值(例如,可以具有其标准偏差)。
·最小和平均(例如,典型的)通信范围,可以基于需要5秒的认知时间来警告交通参与者/对交通参与者采取动作的假设来计算通信范围。
·环境或区域类型(例如,城市、郊区、农村、公路等)。
·平均重量和标准偏差。
·指向性/轨迹的模糊性(给定VRU在其移动中的行为的可预测性的置信度水平)。
·集群大小:集群中VRU 116的数量。VRU可能领导集群并且随后指示其大小。在此类情况下,领导方VRU可以被定位为用作集群的参考位置。
这些简档参数不是维持在内部表格中的动力学参数,而是用于对VRU 116进行分类并评估属于特定简档的VRU 116的行为的典型值的指示。示例VRU简档可以是以下各项:
·VRU简档1——行人。该简档中的VRU 116可以包括不使用机械设备的任何道路使用者,并且包括例如,人行道上的行人、儿童、婴儿车、残疾人、由狗引导的盲人、老年人、下了自行车的骑手等。·VRU简档2——骑自行车者。该简档中的VRU 116可包括骑自行车者和可能具有电动引擎的类似的轻型交通工具骑行者。该VRU简档包括骑自行车者,也包括单轮车、轮椅使用者、载有骑行者的马、滑行者、电动滑板车、赛格威等。应该注意的是,轻型交通工具本身并不表示VRU,而是仅与人组合才创建VRU。
·VRU简档3——骑摩托车者。该简档中的VRU 116可包括装配有允许其在道路上移动的引擎的骑摩托车者。该简档包括电动两轮车(PTW)的用户(例如,驾驶员和乘客,例如,儿童和动物),该电动两轮车诸如轻便摩托车(电动滑板车)、摩托车或边车,并且还可包括四轮全地形车(four-wheeled all-terrain vehicle,ATV)、雪地摩托车(或雪地机)、用于海洋环境的摩托艇和/或其他类似有动力交通工具。
·VRU简档4——对其他道路使用者构成安全性风险的动物。该简档中的VRU 116可能包括狗、野生动物、马、牛、羊等。这些VRU 116中的一些可能具有其自己的ITS-S(例如,城市中的狗或马)或某种其他类型的设备(例如,狗项圈中的GPS模块、植入的RFID标签等),但该简档中的大多数VRU 116将只能被间接检测到(例如,农村地区和公路情形中的野生动物)。动物VRU 116的集群可能是动物群,如一群羊、牛或野猪。当必须为保护VRU而作出决策时,该简档具有较低的优先级。
ETSI EN 302 636-4-1版本1.3.1(2017年08月)(此后称为“[EN302634-4-1]”)、ETSI EN 302 636-3版本1.1.2(2014年03月)(“[EN302636-3]”)中讨论的点对多点通信可用于传送VAM,如ETSI TS 103300-3版本0.1.11(2020年05月)(“[TS103300-3]”)中指定。
VAM的频率/周期性范围。VAM生成事件引起一个VAM的生成。连续VAM生成事件开始之间经过的最短时间等于或大于:T_GenVam。T_GenVam被限制为T_GenVamMin(T_GenVam最小)≤T_GenVam≤T_GenVamMax(T_GenVam最大),其中T_GenVamMin和T_GenVamMax在表11(第8节)中指定。当集群VAM被传送时,T_GenVam可以比单独的VAM的T_GenVam小。
在ITS-G5的情况下,T_GenVam根据ETSI TS 103 175中指定的分散式拥塞控制(Decentralized Congestion Control,DCC)的信道使用要求进行管理。参数T_GenVam由VBS管理实体以毫秒为单位提供。如果管理实体提供该参数的值高于T_GenVamMax,则T_GenVam被设置为T_GenVamMax,并且如果该值低于T_GenVamMin或未提供该参数,则T_GenVam被设置为T_GenVamMin。参数T_GenVam表示连续VAM生成事件之间经过的时间的当前有效下限。
在C-V2X PC5的情况下,可以根据ETSI TS 103 574中接入层定义的拥塞控制机制来管理T_GenVam。
触发条件。由VRU-ITS-S处的VBS进行单独的VAM传送管理。如果满足以下条件中的任一项,并且单独的VAM传送不受冗余缓解技术的影响,则立即或在最早的时间第一次生成单独的VAM以供传送:
6.VRU 116处于VRU-空闲VBS状态并且已进入VRU-活跃-独立。
7.VRU 116/117处于VRU-被动VBS状态;已经决定离开集群并进入VRU-活跃-独立VBS状态。
8.VRU 116/117处于VRU-被动VBS状态;VRU已经确定一个或多个新的交通工具或其他VRU 116/117(例如VRU简档3–骑摩托车者)已经来到横向地比最小安全横向距离(minimum safe lateral distance,MSLaD)更接近、纵向地比最小安全纵向距离(minimumsafe longitudinal distance,MSLoD)更接近、并且垂直地比最小安全垂直距离(minimumsafe vertical distance,MSVD)更接近;并且已经决定离开集群并进入VRU-活跃-独立VBS状态,以便传送立即VAM。
9.VRU 116/117处于VRU-被动VBS状态;已经确定VRU集群领导者丢失,并且已经决定进入VRU-活跃-独立VBS状态。
10.VRU 116/117处于VRU-活跃-集群领导者VBS状态;已经确定分解集群,并且已经传送具有解散指示的VRU集群VAM;并且已经决定进入VRU-活跃-独立VBS状态。
连续的VAM传送取决于在此描述的条件。连续的单独的VAM生成事件以等于或大于T_GenVam的间隔发生。如果始发VRU-ITS-S 117仍然处于VBS VRU-活跃-独立VBS状态,以下条件中的任一项被满足,并且单独的VAM传送不受冗余缓解技术的影响,则作为生成事件的一部分,单独的VAM被生成以用于传送:
9.自上一次传送单独的VAM以来所经过的时间超过T_GenVamMax。
10.VRU的参考点的当前估计位置与最后包括在单独的VAM中的参考点的估计位置之间的欧几里得绝对距离超过预定义的阈值minReferencePointPositionChangeThreshold(最小参考点位置改变阈值)。
11.VRU 116的参考点的当前估计地面速度与最后包括在单独的VAM中的参考点的估计绝对速度之间的差超过预定义的阈值minGroundSpeedChangeThreshold(最小地面速度改变阈值)。
12.VRU 116的参考点的当前估计地面速度向量的定向与最后包括在单独的VAM中的VRU 116的参考点的地面速度向量的估计定向之间的差超过预定义阈值minGroundVelocityOrientationChangeThreshold(最小地面速度定向改变阈值)。
13.与(一个或多个)交通工具或(一个或多个)其他VRU 116的当前估计碰撞概率(例如,如由轨迹拦截概率测得)同与单独的VAM中最后报告的与(一个或多个)交通工具或(一个或多个)其他VRU 116的估计碰撞概率之间的差超过预定义阈值minCollisionProbabilityChangeThreshold(最小碰撞概率改变阈值)。
14.始发ITS-S是处于VRU-活跃-独立VBS状态的VRU,并且在其先前的单独的VAM传送之后决定加入集群。
15.VRU 116/117已经确定一个或多个新的交通工具或其他VRU116/117在最后传送的VAM之后已经同时满足以下条件。这些条件是:来到横向地比最小安全横向距离(MSLaD)更接近、来到纵向地比最小安全纵向距离(MSLoD)更接近、以及来到垂直地比最小安全垂直距离(MSVD)更接近。
由VRU-ITS-S处的VBS进行的VRU集群VAM传送管理。如果满足以下条件中的任何一项,并且VRU集群VAM传送不受冗余缓解技术的影响,则立即或在最早的时间第一次生成VRU集群VAM以供传送:处于VRU-活跃-独立VBS状态的VRU 116确定形成VRU集群。
连续的VRU集群VAM传送取决于在此描述的条件。连续的VRU集群VAM生成事件以等于或大于T_GenVam的间隔在集群领导者处发生。如果以下条件中的任何一项被满足,并且VRU集群VAM传送不受冗余缓解技术的影响,则作为生成事件的一部分,VRU集群VAM被生成以供集群领导者传送:
17.自上一次传送VRU集群VAM以来所经过的时间超过T_GenVamMax。
·VRU集群的参考点的当前估计位置与最后包括在VRU集群VAM中的参考点的估计位置之间的欧几里得绝对距离超过预定义的阈值minReferencePointPositionChangeThreshold(最小参考点位置改变阈值)。
·集群的当前估计宽度与包括在最后传送的VAM中的估计宽度之间的差超过预定义的阈值minClusterWidthChangeThreshold(最小集群宽度改变阈值)。
·集群的当前估计长度与包括在最后传送的VAM中的估计长度之间的差超过预定义的阈值minClusterLengthChangeThreshold(最小集群长度改变阈值)。
·VRU集群的参考点的当前估计地面速度与最后包括在VRU集群VAM中的参考点的估计绝对速度之间的差超过预定义的阈值minGroundSpeedChangeThreshold(最小地面速度改变阈值)。
·VRU集群的参考点的当前估计地面速度向量的定向与最后包括在VRU集群VAM中的参考点的地面速度向量的估计定向之间的差超过预定义阈值minGroundVelocityOrientationChangeThreshold(最小地面速度定向改变阈值)。
·VRU集群与(一个或多个)交通工具或(一个或多个)其他VRU的当前估计的碰撞概率(例如,由具有集群边界区域的其他交通工具/VRU 116/117的轨迹拦截概率所测得)与VAM中最后报告的与(一个或多个)交通工具或(一个或多个)其他VRU的估计碰撞概率之间的差超过minCollisionProbabilityChangeThreshold(最小碰撞概率改变阈值)。
·在先前的VAM生成事件之后,VRU集群类型已经改变(例如从同构集群改变为异构集群,或者从异构集群改变为同构集群)。
·集群领导者在传送先前的VRU集群VAM之后已经确定分解集群。
·在传送先前的VRU集群VAM之后,有超过预定义数量的新VRU116/117加入VRU集群。
·在传送先前的VRU集群VAM之后,有超过预定义数量的成员已离开VRU集群。
·处于VRU-活跃-集群领导者VBS状态的VRU已经确定在最后传送VAM之后一个或多个新的交通工具或非成员VRU 116/117(例如,VRU简档3-骑摩托车者)已同时满足以下条件。这些条件是:来到横向地比最小安全横向距离(MSLaD)更接近、来到纵向地比最小安全纵向距离(MSLoD)更接近、以及来到垂直地比最小安全垂直距离(MSVD)更接近于集群边界框。
VAM冗余缓解。在不影响附近的VRU安全性和VRU认知的情况下,考虑在设施层处的VAM生成频率与接入层处的通信开销之间的平衡。在VAM生成事件下的VAM传送可能受到以下冗余缓解技术的影响:
·如果以下所有条件同时被满足,则始发VRU-ITS-S 117跳过当前单独的VAM。自始发VRU-ITS-S 117上一次传送VAM以来所经过的时间不超过N(例如4)倍T_GenVamMax;参考点的当前估计位置与所接收的VAM中的参考点的估计位置之间的欧几里得绝对距离小于minReferencePointPositionChangeThreshold(最小参考点位置改变阈值);参考点的当前估计速度与所接收的VAM中的参考点的估计绝对速度之间的差小于minGroundSpeedChangeThreshold(最小地面速度改变阈值);以及当前估计地面速度向量的定向与所接收的VAM中的估计的参考点地面速度向量的定向的差小于minGroundVelocityOrientationChangeThreshold(最小地面速度定向改变阈值)。
·或者满足以下条件中的一项:VRU 116咨询适当的地图,以验证VRU 116是否位于诸如建筑物等之类的受保护的或不可驾驶的区域;VRU位于被规定为行人专用区的地理区域中。该区域仅允许VRU简档1和4;VRU 116将自己视为VRU集群的成员,并且尚未接收到来自集群领导者的集群分解消息;与自我-VRU 116有关的信息已经由另一个ITS-S在T_GenVam内报告。
VAM生成时间。除了VAM生成频率之外,VAM生成所需的时间和消息构造所用数据的及时性对于数据在接收方ITS-S中的适用性是决定性的。为了确保对接收到的VAM的正确解释,每个VAM被加时间戳。期望不同的ITS-S之间可接受的时间同步并且这在本说明书的范围之外。VAM生成所需的时间小于T_AssembleVAM(T_组装VAM)。VAM生成所需的时间是指VAM生成被触发所在的时间与VAM被递送到N&T层所在的时间之间的时间差。
VAM时间戳。由ITS-S散播的VAM中提供的参考时间戳与在BasicContainer(基本容器)DF中提供的参考位置被始发ITS-S确定所在的时间相对应。时间戳的格式和范围在ETSIEN 302 637-2版本1.4.1(2019年4月)(此后称为“[EN302637-2]”)的第B.3款中定义。如在[EN302637-2]中,VAM生成时间与参考时间戳之间的差小于32 767ms。这可能有助于避免时间戳环绕复杂化。
传送VAM。处于VRU-活跃-独立状态的VRU-ITS-S 117发送“单独的VAM”,而处于VRU-活跃-集群领导者VBS状态的VRU-ITS-S代表VRU集群传送“集群VAM”。处于VRU-被动VBS状态的集群成员VRU-ITS-S 117在离开VRU集群时,发送包含VruClusterOperationContainer(Vru集群操作容器)的单独的VAM。处于VRU-活跃-独立的VRU-ITS-S 117在加入VRU集群时发送作为包含VruClusterOperationContainer的“单独的VAM”的VAM。
VRU 116/117呈现出简档的多样性,这引起在共享区域内移动时的随机行为。此外,它们的惯性比交通工具低得多(例如,行人可以在小于一秒钟的时间内进行U形转弯),并且因此它们的运动动力学更难以预测。
VBS 221使得能够散播VRU认知消息(VAM),其目的在于在其他VRU 116/117级或交通工具110级建立认知,目标在于解决导致碰撞的冲突情形。解决冲突情形的交通工具可能动作与冲突之前的剩余时间、交通工具速度、交通工具减速或车道改变能力、天气和交通工具状况(例如道路的状态和交通工具轮胎的状态)直接相关。在最好的情况下,交通工具需要1至2秒才能够避免碰撞,但在最坏的情况下,可能需要多于4至5秒才能避免碰撞。如果交通工具离VRU非常近并且具有恒定速度(例如,碰撞时间在1到2秒之间),就不可能再谈论认知,因为这实际上是对VRU和交通工具两者的警报。
处于冲突情形中的VRU 116/117和交通工具需要在到达冲突点之前至少5到6秒时检测到它,以确保具有能力及时采取动作以避免碰撞。一般来说,碰撞风险指示符(例如TTC、TDTC、PET等,参见例如[TS103300-2])被用来预测冲突的实例。这些指示符需要以下各项的预测:由主体VRU和主体交通工具遵循的轨迹(路径);和/或主体VRU和主体交通工具一起到达冲突点所需的时间。
这些预测应该从主体VRU与主体交通工具之间交换的数据元素得出。相比于对于VRU,对于交通工具,轨迹和时间预测可以轨迹和时间预测更好地被预测,因为交通工具的轨迹受到道路地形、交通、交通规则等约束,而VRU 116/117具有更多的移动自由。对于交通工具,它们的动力学也受到它们的大小、它们的质量和它们的航向变化能力的约束,而大多数VRU并非如此。
因此,在许多情形下,不可能仅基于VRU 116/117最近的路径历史和它们的当前位置来预测它们的确切的轨迹或速度。如果这一点被执行,则可能预期大量假肯定和假否定结果,从而导致错误的碰撞避免动作的决策。
避免假肯定和假否定结果的可能的方法是基于由交通工具和由VRU提供的确定性信息(运动动力学改变指示)以及通过对重复情境情形中的统计VRU行为的更好了解提供的确定性信息来分别进行交通工具路径预测和VRU路径预测。在建立路径历史时,总是可以对预测进行事后验证。检测到的错误随后可以用来校正未来的预测。
VRU运动动力学改变指示(VRU Motion Dynamic Change Indication,MDCI)是根据确定性指示符建立的,这些确定性指示符是由VRU设备本身直接提供的或者是从移动性模态状态改变(例如,从行人转变到骑自行车者、从骑着他的自行车的行人转变到推着他的自行车的行人、从骑着他的摩托车的骑摩托车者转变到从他的摩托车弹出的骑摩托车者、从危险区域转变到受保护的区域,例如进入电车,火车等)得到的。
图5示出示例VAM格式结构。如图5所示,VAM包括共同的ITS PDU头部、生成(Δ)时间容器、基本容器、具有VRU的动力学属性(例如运动、加速度等)的VRU高频容器、具有VRU的物理属性(有条件的强制性,例如具有较高的周期性,参见[TS103300-3]的第7.3.2款)的VRU低频容器、集群信息容器、集群操作容器以及运动预测容器。在一些实现方式中,VAM是可扩展的,但本文档中没有定义扩展。
ITS PDU头部应如ETSI TS 102 894-2版本1.3.1(2018年8月)(“[TS102894-2]”)所指定的那样。VAM情境中ITS PDU头部的详细数据呈现规则应如[TS103300-3]附件B所指定的那样。ITS PDU头部中的StationId(站Id)字段应在签署假名证书改变时或在VRU作为集群成员之后开始传送单独的VAM时(例如,当作为它领导者分解集群时,或当它作为任何集群成员离开集群时)改变。例外情况可能是,如果VRU设备经历如[TS103300-3]的第5.4.2.2款中定义的集群“失败的加入”,则它应该继续使用它在该失败的加入之前使用的StationId和其他标识符。VAM中的生成时间是CAM中使用的GenerationDeltaTime(生成Δ时间)。这是对自ITS时期以来经过的毫秒数的测量,对2
基本容器提供始发ITS-S的基本信息,包括例如始发ITS-S的类型和始发ITS-S的最新地理位置。对于始发ITS-S的类型,该DE在某种程度上与VRU简档重叠,尽管它们并不完全匹配(例如,轻便摩托车(3)和摩托车(4)两者均与VRU简档3相对应)。为了使未来能够有可能由非VRU ITS-S传送VAM(参见第4.1款和附件I),这两个数据元素保持独立。对于由VBS在VAM生成时获得的始发ITS-S的最新地理位置。该DF已经在[TS102894-2]中定义,并且包括positionConfidenceEllipse(位置置信度椭圆),该positionConfidenceEllipse以95%置信度水平提供所测得的位置的准确性。针对由实现VBS的所有ITS-S生成的VAM都应存在基本容器。
尽管基本容器具有与其他ETSI ITS消息中的BasicContainer(基本容器)相同的结构,但类型DE包含特定于VRU的类型值,这些类型值不被交通工具消息的BasicContainer使用。未来某个时间点,[TS102894-2]中ITS通用数据字典(Common Data Dictionary,CDD)中的类型字段将旨在被扩展为包括VRU类型。此时,VRU BasicContainer和交通工具BasicContainer将是相同的。
由VRU ITS-S生成的所有VAM至少包括VRU高频(VRU high frequency,VRU HF)容器。VRU HF容器包含VRU ITS-S的潜在快速改变的状态信息,诸如航向或速度。由于VAM不被来自简档3的VRU(骑摩托车者)使用,这些容器中没有一个容器适用于VRU简档3。相反,VRU简档3仅利用CAM传送摩托车特殊容器(参见例如,[TS103300-2]中的第4.1款、第7.4款和第4.4款)。另外,如果相关条件被满足,则由VRU ITS-S生成的VAM可以包括表7中指定的容器中的一个或多个容器。
表24:VAM有条件的强制和任选的容器
VAM的VRU HF容器包含VRU ITS-S的潜在快速改变的状态信息。它应包括第B.3.1款中列出的参数。
该容器中的信息的部分对一些VRU简档没有意义。因此,它们被指示为任选的,但被推荐给特定的VRU简档。
注意:VRU简档被包括在VRU LF容器中,并且因此不像VRU HF容器那样经常传送(参见第6.2款)。然而,接收方可以从vruStationType(vru站类型)字段中得出VRU简档:行人指示简档1、自行车或轻型VRU交通工具指示简档2、轻便摩托车或摩托车指示简档3,并且动物指示简档4。
在考虑VRU时,用于描述CAM中车道位置的DF是不足的,因为它不包括自行车道和人行道。因此,它已被扩展到覆盖VRU可能位于的所有位置。当存在时,vruLanePosition(vru车道位置)DF应描述道路上的车道(与针对交通工具的相同)、道路外的车道或前述类型的两条车道之间的岛。进一步的细节在第B.3.10款中的DF定义中提供。
VruOrientation(Vru定向)DF通过定义VRU交通工具纵轴关于WGS84北之间的角度来补充VRU交通工具的尺寸。它限于来自简档2的VRU(骑自行车者)和来自简档3的VRU(骑摩托车者)。当存在时,应当如第B.3.17款所定义的那样。VruOrientationAngle(Vru定向角度)与交通工具航向不同,交通工具航向与VRU移动相关,而定向与VRU位置相关。
RollAngle(滚转角度)DF提供转弯的两轮车的指示。它被定义为[ISO8855]中指定的地平面与交通工具的Y轴相对于地平面围绕X轴的当前定向之间的角度。DF还包括角度准确性。这两个值以与DF_Heading(DF_航向)相同的方式进行编码,参见[TS102894-2]中的A.101,以及以下约定:
正值意味着向右侧滚转(0...“500”),其中500与向右50度的滚转角度值相对应。
负值意味着向左侧滚动(3600...“3100”),其中3100与向左50度的滚转角度值相对应。
不应当使用500与3 100之间的值
DE vruDeviceUsage(vru设备使用)向VAM接收方提供与VRU的并行活动有关的指示。该DE与SAE国际“Vulnerable Road User Safety Message Minimum PerformanceRequirements(易受伤害道路使用者安全性消息最小性能要求)”,V2X交通工具应用技术委员会,SAE地面交通工具标准J2945/9(2017年3月1日)(“[SAE-J2945/9]”)中指定的DE_PersonalDeviceUsageState(DE_个人设备使用状态)类似。它限于来自简档1的VRU,例如,行人。当存在时,它应当如第B.3.19款所定义的那样,并将提供表25中给出的可能值。为了尊重用户对隐私性的选择,设备配置应用应包括传送该信息的同意书。如何实现这种同意书在本文档的范围之外。在选项被选出(默认)的情况下,设备应系统地发送值“不可用(0)”。
表25:vruDeviceUsage可能值
DE VruMovementControl(Vru移动控制)指示由VRU用来控制VRU交通工具的纵向移动的机制。它主要针对来自简档2的VRU,例如,骑自行车者。当存在时,它应当如第B.3.16款所定义的那样呈现,并将提供表26中给出的可能值。表中提供的不同值的使用可能取决于它们所应用的国家。例如,取决于一些国家的自行车,对于制动而言踏板移动可能是必要的。该DE也可以用作周围交通工具的机载系统的信息,以标识骑自行车者(等等),并且因此改善/加快已经从VRU交通工具(在其进入汽车的视场之前)接收到的消息与由其他交通工具的相机(一旦VRU交通工具进入视场)检测到的对象的“匹配”过程。
表26:VruMovementControl可能值
VAM的VRU HF容器包含VRU ITS-S的潜在缓慢改变信息。它应包括[TS103300-3]的第B.4.1款中列出的参数。一些元素是强制性的,其他元素是任选的或有条件的强制性的。
VRU LF容器应以如[TS103300-3]的第6.2款所指定的可参数化的频率被包括在VAM中。VAM VRU LF容器具有以下内容。
DE VruProfileAndSubProfile(Vru简档和子简档)应包含始发VRU ITS-S的简档和子简档的标识(如果被定义)。表27示出本文档中指定的简档和子简档的列表。
表27基于简档的VruProfileAndSubProfile描述
如果VRU LF容器存在,则DE VruProfileAndSubProfile是任选的。如果它不存在,则这意味着简档是不可用的。VRU简档3的子简档仅在CAM特殊容器中使用。DEVRUSizeClass(VRU大小类别)包含VRU的大小的信息。DE VruSizeClass应取决于VRU简档。此种依赖关系在表28中被描绘。
表28:基于简档的VruSizeClass描述
DE VruExteriorLight(Vru外部灯)应给出发起VAM的VRU ITS-S的最重要的外部灯开关的状态。如果低VRU LF容器存在,则DE VruExteriorLight对于简档2和简档3应是强制性的。对于所有其他简档,它应该是任选的。
VAM的VRU集群容器包含与VRU ITS-S的VRU集群相关的集群信息和/或操作。根据所包括的数据/参数的特性,VRU集群容器由两种类型的集群容器组成。
VRU集群信息容器应被添加到源自于VRU集群领导者的VAM中。该容器应提供与VRU集群相关的信息/参数。VRU集群信息容器应属于VruClusterInformationContainer(Vru集群信息容器)类型。
VRU集群信息容器应包括与集群ID、集群边界框的形状、集群的基数大小和集群中VRU的简档有关的信息。集群ID的类型是ClusterID(集群ID)。如[TS103300-3]第5.4.2.2款所指定的那样,ClusterID被集群领导者选择为非零且本地唯一。VRU集群边界框的形状应由DF ClusterBoundingBoxShape(集群边界框形状)指定。集群边界框的形状可以是矩形、圆形或多边形。
VRU集群操作容器应包含与集群状态和组成的改变相关的信息。该容器可由集群VAM传送方或由集群成员(领导者或普通成员)包括。集群领导者应包括VRU集群操作容器,以用于执行解散(分解)集群的操作。集群成员应在其单独的VAM中包括VRU集群操作容器,以执行加入VRU集群和离开VRU集群的集群操作。
VRU集群操作容器应属于VruClusterOperationContainer(Vru集群操作容器)类型。VruClusterOperationContainer提供:
DF clusterJoinInfo(集群加入信息),用于新成员加入VRU集群的集群操作。
DF clusterLeaveInfo(集群离开信息),用于现有集群成员离开VRU集群。
DF clusterBreakupInfo(集群分解信息),用于由集群领导者分别执行解散(分解)集群的操作。
DE clusterIdChangeTimeInfo(集群Id改变时间信息),用于指示集群领导者计划在DE中指示的时间改变集群ID。由于隐私原因,新的Id不与指示一起提供(参见例如,[TS103300-3]的第5.4.2.3款和第6.5.4款)。
在VAM以外的消息中宣称的加入或离开集群的VRU设备应使用ClusterId值0来指示这一点。
离开集群的VRU设备应使用DE ClusterLeaveReason(集群离开原因)指示它离开集群的原因。可用的原因在表29中描绘。分解集群的VRU领导者设备应使用ClusterBreakupReason(集群分解原因)来指示它分解集群的原因。可用的原因在表30中描绘。如果离开集群或分解集群的原因与可用的原因中的一种不完全匹配,则设备应系统地发送值“未提供(0)”。
具体而言,集群中的VRU可以确定一个或多个新的交通工具或其他VRU(例如,VRU简档3—骑摩托车者)横向地比最小安全横向距离(MSLaD)更接近,纵向地比最小安全纵向距离(MSLoD)更接近,并且垂直地比最小安全垂直距离(MSVD)更接近(例如,满足如[TS103300-2]的第6.5.10.5款中的最小安全距离条件);它应离开集群并进入VRU-活跃-独立VBS状态,以便传送具有ClusterLeaveReason为“安全性条件(8)”的立即VAM。如果VRU设备检测到任何其他安全性问题,则同样适用。
设备供应商应该声明VRU设备将加入/离开集群的条件。
表29:ClusterLeaveReason描述
表30:ClusterBreakupReason描述
VruClusterOperationContainer(Vru集群操作容器)不包括由集群领导者对VRU集群的创建。当集群领导者开始发送集群VAM时,这指示它已经创建了VRU集群。当集群领导者发送集群VAM时,如果加入条件被满足,则任何单独的VRU都可以加入集群。
VRU运动预测容器携载VRU的过去和未来的运动状态信息。类型为VruMotionPredictionContainer(Vru运动预测容器)的VRU运动预测容器应包含与以下各项有关的信息:VRU的过去位置,类型为PathHistory(路径历史);VRU的预测未来位置(格式为SequenceOfVruPathPoint(Vru路径点序列));VRU与其他道路使用者/对象之间安全距离指示,类型为SequenceOfVruSafeDistanceIndication(Vru安全距离指示序列)的信息;由另一VRU/对象对VRU的可能轨迹拦截,类型应为SequenceOfTrajectoryInterceptionIndication(轨迹拦截指示序列);VRU的加速度的改变,类型应为AccelerationChangeIndication(加速度改变指示);VRU的航向改变,类型应为HeadingChangeIndication(航向改变指示);以及VRU的稳定性的改变,类型应为StabilityChangeIndication(稳定性改变指示)。
路径历史DF的类型为PathHistory(路径历史)。PathHistory DF应包括VRU在过去时间和/或距离上的最近移动。它最多由40个过去的路径点组成(参见例如,[TS102894-2])。当VRU离开集群并想要在VAM中传送其过去的位置时,VRU可以使用PathHistory DF。
路径预测DF的类型为SequenceOfVruPathPoint(Vru路径点序列)并且应定义VRUITS-S的最多40个未来的路径点、置信度值和对应的时间实例。它包含了针对最多10秒或最多40个路径点的未来路径信息,以较小者为准。
安全距离指示的类型为SequenceOfVruSafeDistanceIndication(安全距离指示序列),并且提供了VRU是否处于距其附近区域中的最多8个其他站在横向上、在纵向上和在垂直方向上所推荐的安全距离的指示。应使用如[TS103300-2]的第6.5.10.5款中所定义的横向距离(LaD)、纵向距离(LoD)和垂直距离(VD)及其相应的阈值、最小安全横向距离(MSLaD)、最小安全纵向距离(MSLoD)和最小安全垂直距离(MSVD)之间的同时比较,来设置VruSafeDistanceIndication(Vru安全距离指示)DF。其他参与的ITS S如VruSafeDistanceIndication DE的StationID DE所指示。容器内的timetocollision(碰撞时间)(TTC)DE应反映基于最新的机载传感器测量和VAM估计的碰撞花费的时间。
SequenceOfTrajectoryInterceptionIndication(轨迹拦截指示序列)DF应包含由自我VRU附近区域中的最多8个其他站对自我VRU的可能轨迹拦截。VRU的轨迹拦截由VruTrajectoryInterceptionIndication DF指示。其他参与的ITS-S由StationID DE指定。轨迹拦截概率及其置信度水平度量由TrajectoryInterceptionProbability(轨迹拦截概率)DE和TrajectoryInterceptionConfidence(轨迹拦截置信度)DE指示。
轨迹拦截指示(TII)DF与[TS103300-2]中的TII定义相对应。
AccelerationChangeIndication(加速度改变指示)DF应包含自我VRU在未来某一时间段内的加速度改变(加速或减速)。DE AccelOrDecel(加速或减速)应给出加速与减速之间的选择。DE ActionDeltaTime(动作Δ时间)应指示持续时间。
HeadingChangeIndication(航向改变指示)DF应包含自我VRU在未来某一时间段内的航向的改变(向左或向右)。DE LeftOrRight(向左或向右)应给出在向左方向上与右方向上的航向改变之间的选择。DE ActionDeltaTime应指示持续时间。
StabilityChangeIndication(稳定性改变指示)DF应包含自我VRU在某一时间段内的稳定性的改变。DE StabilityLossProbability(稳定性损失概率)应给出自我VRU的稳定性损失的概率指示。DE ActionDeltaTime应指示持续时间。
容器的描述在[TS103300-3]的第B.7款中提供,并且要被添加到[TS102894-2]的对应DF和DE在[TS103300-3]的第F.7款中提供。
VRU简档3设备(骑摩托车者)中的ITS站已经传送CAM。因此,如[TS103300-2]和第5款中所指定,它们不应传送完整的VAM,但可以传送它们已经传送的CAM中的VRU特殊交通工具容器。在相关情况下,该要求也适用于由一个VRU简档3(骑摩托车者)和一个或多个VRU简档1((一个或多个)行人)组成的经组合的VRU(参见[TS103300-3]的第5.4.2.6款)的情况。
该特殊交通工具容器的目的在于向周围的交通工具通知V-ITS-S由VRU简档3设备主控,并提供与VRU简档3有关的附加指示。骑摩托车者特殊容器应包括[TS103300-3]的第D.2款中列出的参数。
返回参考图3,VRU 116/117可以被分类为四个简档,这些简档在[TS103300-3]的第4.1款中定义。SAE国际,“Taxonomy and Classification of Powered MicromobilityVehicles(有动力微移动性交通工具的分类标准和分类)”,有动力微移动性交通工具委员会,SAE地面交通工具标准J3194(2019年11月20日)(“[SAE-J3194]”)也提出了有动力微移动性交通工具的分类标准和分类:有动力自行车(例如,电动自行车);有动力站立式滑板车(例如
在[TS103300-2]中和在[TS103300-3]的第5.4.2.6款中,经组合的VRU116/117被定义为VRU简档1潜在地与一个或若干个附加的VRU 116/117、与一个VRU交通工具或动物的组装。若干种VRU交通工具类型是可能的。即使它们中的大多数可以携载VRU,但它们的推进模式可以是不同的,从而导致特定的威胁和易损性:它们可以由人(骑在交通工具上或坐在动物上的人);它们可以由热力引擎推进。在这种情况下,热力引擎仅在点火系统允许时才被激活;和/或它们可以由电动引擎推进。在这种情况下,当电源接通时(没有点火),电动引擎立即被激活。
经组合的VRU 116/117可以是一个人和一个动物的组装(例如,人与马或人与骆驼)。骑着马的人可能决定从马上下来并且随后拉着马。在这种情况下,VRU 116/117执行从简档2到简档1的转变,该转变对其速度具有影响。
VRU 116/117和集群关联的此种多样性使得若干VBS状态机调节标准消息散播和它们相应运动动力学。这些状态机和它们的转换可以被总结如图4。
图4示出示例状态机和转变400。在图4中,当VRU被设置为简档2 VRU 402,并且具有多个附接的设备时,有必要选择活跃的设备。这可以在设备被激活时的初始化时间(配置参数)针对每个附接的设备来实现。在图4中,附接到自行车的设备已被配置成在其与VRU组合期间处于活跃的状态。但是当VRU返回到简档1状态401时,附接到VRU交通工具的设备需要被停用,而如果不处于受保护的位置,则附接到VRU的设备中的VBS 221会再次传送VAM。
在未来,简档2 402、简档1 401和简档4 404VRU可能成为集群的成员,从而将与聚类操作相关联的状态机添加到它们自己的状态。这意味着它们在继续管理它们自己的状态的同时需要尊重集群管理要求。当从一个状态转变到另一个状态时,如果经组合的VRU不再符合集群的要求,则它可以离开集群。
图4中标识的机器状态的转变(例如,T1到T4)影响VRU的运动动力学。这些转变被确定性地连续检测到VRU决策或机械原因(例如VRU从其VRU交通工具中弹出)。所标识的转变具有以下VRU运动动力学影响。
T1是从VRU简档1 401到简档2 402的转变。当VRU决定主动地使用VRU交通工具(骑行)时,该转变手动地被触发或自动地被触发。VRU的运动动力学速度参数值从低速(推/拉他的VRU交通工具)改变为与所选择的VRU交通工具的类别相关的更高的速度。
T2是从VRU简档2 402到简档1 401的转变。当VRU从他的VRU交通工具上下来并离开该VRU交通工具从而变成行人时,该转变手动地被触发或自动地被触发。VRU的运动动力学速度参数值从给定速度改变为与所选择的VRU交通工具的类别相关的更低的速度。
T3是从VRU简档2 402到简档1 401的转变。当VRU离开他的VRU交通工具并推/拉该VRU交通工具以例如进入受保护的环境(例如电车、公共汽车、火车)时,该转变手动地被触发或自动地被触发。VRU的运动动力学速度参数值从给定速度改变为与所选择的VRU交通工具的类别相关的更低的速度。
T4是从VRU简档2 402到简档1 401的转变。当检测到VRU从他的VRU交通工具中弹出时,该转变自动地被触发。VRU的运动动力学速度参数值从给定的速度改变为与他的弹出引起的VRU状态相关的更低的速度。在该情况下,VRU交通工具被认为是道路上的障碍物,并且因此应该散播DENM,直到它从道路上被移除(其ITS-S被停用)。
弹出情况可通过稳定性指示符来检测,稳定性指示符包括惯性传感器和从其行为中得出的骑行者能力水平。然后,稳定性可以用完全稳定性损失的风险级别来表达。当风险级别为100%时,这可以被确定为VRU的事实弹出。
根据运动改变动力学速度参数值的改变,可以从注册的“情境”过去路径历史(平均VRU踪迹)提供新的路径预测。情境方面考虑了若干参数,这些参数与同VRU正在其中演变的情境类似的情境相关。
除了上面标识的可能急剧地影响VRU速度的状态转变之外,以下的VRU指示也会影响VRU速度和/或VRU轨迹(作为在VAM中已经定义的参数的附加)。
停止指示符。VRU或外部源(针对VRU为红色的交通灯)可指示VRU停止片刻。当该指示符被设置时,它对于了解VRU停止的持续时间也可能是有用的。该持续时间可以在被外部源(例如,从交通灯接收到的SPATEM信息)提供时或在通过分析类似情况下的VRU行为而习得时被估计。
能见度指示符。天气状况可能影响VRU能见度,并相应地改变其运动动力学。即使本地的交通工具可以检测到这些天气状况,但在一些情况下,对VRU的影响可能难以被交通工具估计。典型的示例是以下内容:根据VRU的定向,VRU可能被严重的太阳眩光干扰(例如,在早晨太阳升起时,或在傍晚太阳落下时),从而限制其速度。
返回参考图2,N&T层203提供OSI网络层和OSI传输层的功能,并且包括一个或多个联网协议、一个或多个传输协议、以及网络和传输层管理。附加地,传感器接口和通信接口的各方面可以是N&T层203和接入层204的部分。联网协议可尤其包括IPv4、IPv6、具有移动性支持的IPv6联网、地理联网之上的IPv6、CALM FAST协议等等。传输协议可尤其包括BOSH、BTP、GRE、地理联网协议、MPTCP、MPUDP、QUIC、RSVP、SCTP、TCP、UDP、VPN、一个或多个专用ITSC传输协议、或某种其他合适的传输协议。这些联网协议中的每种联网协议可连接至对应的传输协议。
接入层包括:物理层(physical layer,PHY)204,物理地连接至通信介质;数据链路层(data link layer,DLL),可被细分为管理对通信介质的访问的介质访问控制子层(medium access control,MAC)、以及逻辑链路控制子层(logical link control,LLC);管理适配实体(management adaptation entity,MAE),用于直接管理PHY 204和DLL;以及安全适配实体(security adaptation entity,SAE),用于为接入层提供安全服务。接入层还可包括外部通信接口(communication interface,CI)和内部CI。CI是特定接入层技术或者RAT和协议的实例化,该RAT和协议诸如3GPP LTE、3GPP 5G/NR、C-V2X(例如,基于3GPP LTE和/或5G/NR)、WiFi、W-V2X(例如,包括ITS-G5和/或DSRC)、DSL、以太网、蓝牙、和/或本文中所讨论的任何其他RAT和/或通信协议、或者其组合。CI提供一个或多个逻辑信道(logicalchannel,LCH)的功能,其中,LCH到物理信道的映射由所涉及的特定接入技术的标准来指定。如先前所提到的,V2X RAT可包括ITS-G5/DSRC和3GPP C-V2X。附加地或替代地,可使用其他接入层技术(V2X RAT)。
ITS-S参考体系结构200可以可适用于图6和图8的元素。ITS-S网关611、811(参见例如,图6和图8)在设施层处互连OSI层5至OSI层7处的OSI协议栈。OSI协议栈典型地连接至系统(例如,交通工具系统或路边系统)网络,并且ITSC协议栈连接至ITS站内部的网络。ITS-S网关611、811(参见例如,图6和图8)能够对协议进行转换。这允许ITS-S与该ITS-S在其中实现的系统的外部元件进行通信。ITS-S路由器611、811提供ITS-S参考体系结构200的、除应用层和设施层之外的功能。ITS-S路由器611、811在层3处互连两个不同的ITS协议栈。ITS-S路由器611、811可以能够对协议进行转换。这些协议栈中的一个协议栈典型地连接至ITS站内部的网络。ITS-S边界路由器814(参见例如,图8)提供与ITS-S路由器611、811相同的功能,但是包括与外部网络有关的协议栈,该外部网络可以不遵循ITS的管理和安全原理(例如,图2中的ITS管理层和ITS安全层)。
附加地,在同一级别下操作但不被包括在ITS-S中的其他实体包括:该级别下的相关用户、相关HMI(例如,音频设备、显示/触屏设备等);当ITS-S为交通工具时,用于计算机辅助的和/或自动交通工具的交通工具运动控制(HMI和交通工具运动控制实体两者均可由ITS-S应用触发);收集和共享IoT数据的本地设备传感器系统和IoT平台;(一个或多个)本地设备传感器融合和致动器应用,其可包含ML/AI并对由传感器系统发出的数据流进行聚合;本地感知和轨迹预测应用,其消费融合应用的输出并馈送ITS-S应用;以及相关ITS-S。传感器系统可以包括V-ITS-S 110或R-ITS-S 130中的一个或多个相机、无线电检测和测距、光检测和测距等。在中央站中,传感器系统包括可位于道路一侧但将其数据直接报告给中央站而不涉及V-ITS-S 110或R-ITS-S 130的传感器。在一些情况下,传感器系统可附加地包括(一个或多个)陀螺仪、(一个或多个)加速度计等等(参见例如,图12的传感器电路1272)。下文参照图6、图7和图8讨论了这些元素的各个方面。
图6描绘了示例交通工具计算系统600。在该示例中,交通工具计算系统600包括V-ITS-S 601和电子控制单元(Electronic Control Unit,ECU)605。V-ITS-S 601包括V-ITS-S网关611、ITS-S主机612以及ITS-S路由器613。交通工具ITS-S网关611提供将车载网络处的组件(例如,ECU 605)连接至ITS站内部网络的功能。到车载组件(例如,ECU 605)的接口可与本文中所讨论的那些接口(参见例如,图12中的IX 1256)相同或类似,和/或可以是专有的接口/互连。对组件(例如,ECU 605)的访问可以是实现方式特定的。ECU 605可以与先前参考图1所讨论的驾驶控制单元(DCU)174相同或类似。ITS站经由ITS-S路由器613连接至ITS自组织网络。
图7描绘了示例个人计算系统700。个人ITS子系统700提供移动设备中ITSC的应用和通信功能,该移动设备诸如智能电话、平板计算机、可穿戴设备、PDA、便携式媒体播放器、膝上型电脑和/或其他移动设备。个人ITS子系统700包含个人ITS站(personal ITSstation,P-ITS-S)701和P-ITS-S 701中未包括的各种其他实体,这在下文更详细地讨论。用作个人ITS站的设备也可执行作为另一ITS子系统的部分的HMI功能,从而经由ITS站内部网络(未示出)连接至该另一ITS子系统。出于本公开的目的,个人ITS子系统700可用作VRUITS-S 117。
图8描绘了示例路边基础设施系统800。在该示例中,路边基础设施系统800包括R-ITS-S 801、(一个或多个)输出设备805、(一个或多个)传感器808、以及一个或多个无线电单元(radio unit,RU)810。R-ITS-S 801包括R-ITS-S网关811、ITS-S主机812、ITS-S路由器813以及ITS-S边界路由器814。ITS站经由ITS-S路由器813连接至ITS自组织网络和/或ITS接入网络。R-ITS-S网关811提供将路边网络处的路边系统的组件(例如,输出设备805和传感器808)连接至ITS站内部网络的功能。到车载组件(例如,ECU 605)的接口可与本文中所讨论的那些接口(参见例如,图12中的IX 1256)相同或类似,和/或可以是专有的接口/互连。对组件(例如,ECU 605)的访问可以是实现方式特定的。(一个或多个)传感器808可以是与下文参考图1讨论的传感器172和/或下文参考图12讨论的传感器电路1272相同或类似的感应回路和/或传感器。
致动器813是负责移动和控制机制或系统的设备。致动器813用于改变传感器808的操作状态(例如,打开/关闭、变焦或聚焦等)、位置和/或定向。致动器813用于改变某种其他路边装备的操作状态,该路边装备诸如门、交通灯、数字标牌或可变消息标志(variablemessage sign,VMS)等。致动器813被配置成用于经由路边网络从R-ITS-S 801接收控制信号,并将信号能量(或某种其他能量)转换为电能和/或机械运动。控制信号可以是相对低能量的电压或电流。致动器813包括机电继电器和/或固态继电器,其被配置成用于切换电子设备打开/关闭和/或控制电机,和/或可与下文参考图12讨论的致动器1274相同或类似。
图6、图7和图8中每一个还示出在同一级别操作但未被包括在ITS-S中的实体,包括:相关HMI 606、706和806;交通工具运动控制608(仅在交通工具级);本地设备传感器系统和IoT平台605、705和805;本地设备传感器融合和致动器应用604、704和804;本地感知和轨迹预测应用602、702和802;运动预测603和703或运动对象轨迹预测803(在RSU级);以及连接的系统607、707和807。
本地设备传感器系统和IoT平台605、705和805收集和共享IoT数据。VRU传感器系统和IoT平台705至少由存在于系统的每个ITS-S中的PoTi管理功能组成(参见例如,ETSIEN 302 890-2(“[EN302890-2]”))。PoTi实体提供对所有系统元件而言共同的全局时间、以及移动元件的实时位置。本地传感器也可嵌入在其他移动元件中以及路边基础设施(例如,智能交通灯、电子标牌等中的相机)中。可以分布在系统元件上的IoT平台可对提供与VRU系统700周围的环境有关的附加信息做出贡献。在V-ITS-S 110或R-ITS-S 130中,传感器系统可以包括一个或多个相机、无线电检测与测距、光检测与测距和/或其他传感器(参见例如,图12的1222)。在VRU设备117/700中,传感器系统可包括(一个或多个)陀螺仪、(一个或多个)加速度计等等(参见例如,图12的1222)。在中央站(未示出)中,传感器系统包括可位于道路一侧但将其数据直接报告给中央站而不涉及V-ITS-S 110或R-ITS-S 130的传感器。
(本地)传感器数据融合功能和/或致动器应用604、704和804提供对从VRU传感器系统和/或不同的本地传感器获得的本地感知数据的融合。这可包括对由传感器系统和/或不同的本地传感器发出的数据流进行聚合。本地传感器融合和(一个或多个)致动器应用可包含机器学习(ML)/人工智能(AI)算法和/或模型。传感器数据融合通常依赖于其输入以及随后与这些输入的时间戳(这些输入的时间戳与共同的给定时间相对应)的一致性。传感器数据融合和/或ML/AL技术可用于确定本文讨论的DCROM的占用值。
各个ML/AI技术可以用于执行传感器数据融合和/或可用于本文中所讨论的其他目的,诸如DCROM。在应用604、704和804是(或包括)AI/ML功能的情况下,应用604、704和804可包括具有根据有监督学习、无监督学习、强化学习(RL)和/或(一个或多个)神经网络(Neural network,NN)从输入数据(例如,上下文数据等)学习有用信息的能力的AI/ML模型。在推断或预测生成期间,分开地训练的AI/ML模型也可以在AI/ML管线中被链接在一起。
输入数据可包括AI/ML训练信息和/或AI/ML模型推断信息。训练信息包括ML模型的数据,包括输入(训练)数据以及用于有监督训练的标签、超参数、参数、概率分布数据、以及训练特定的AI/ML模型所需要的其他信息。模型推断信息是作为用于推断生成(或作出预测)的AI/ML模型的输入而被需要的任何信息或数据。由AI/ML模型用于训练和推断的数据可在很大程度上重叠,然而这些类型的信息是指不同的概念。输入数据被称为训练数据,并且具有已知的标签或结果。
有监督学习是旨在在给定标记的数据集的情况下学习从输入到输出的映射函数的ML任务。有监督学习的示例包括:回归算法(例如,线性回归、逻辑回归等)、基于实例的算法(例如,k-最近邻等)、决策树算法(例如,分类和回归树(Classification AndRegression Tree,CART)、迭代二分器3(Iterative Dichotomiser 3,ID3)、C4.5、卡方自动交互检测(chi-square automatic interaction detection,CHAID)等)、模糊决策树(Fuzzy Decision Tree,FDT)等、支持向量机(Support Vector Machine,SVM)、贝叶斯算法(例如,贝叶斯网络(Bayesian network,BN)、动态BN(dynamic BN,DBN)、朴素贝叶斯等)和集成算法(例如,极端梯度提升、投票集成、自助聚集(“装袋”)、随机森林等)。有监督学习可以进一步分组为回归和分类问题。分类与预测标签有关,而回归与预测数量有关。对于无监督学习,输入数据未被标记,并且不具有已知的结果。无监督学习是旨在学习用于从未标记的数据中描述隐藏结构的函数的ML任务。无监督学习的一些示例为K-均值聚类和主成分分析(principal component analysis,PCA)。神经网络(Neural network,NN)通常用于有监督学习,但也可以用于无监督学习。NN的示例包括深度NN(deep NN,DNN)、前馈NN(feedforward NN,FFN)、深度FNN(deep FNN,DFF)、卷积NN(convolutional NN,CNN)、深度CNN(deep CNN,DCN)、反卷积NN(deconvolutional NN,DNN)、深度信念NN、感知NN、循环NN(recurrent NN,RNN)(例如,包括长短期记忆(Long Short Term Memory,LSTM)算法、门控循环单元(gated recurrent unit,GRU)等)、深度堆叠网络(deep stacking network,DSN),强化学习(Reinforcement learning,RL)是基于与环境的交互的目标导向学习。在RL中,代理旨在通过基于试错过程与环境交互来优化长期目标。RL算法的示例包括马尔可夫决策过程、马尔可夫链、Q-学习、多臂老虎机学习和深度RL。
在一个示例中,ML/AI技术被用于对象跟踪。对象跟踪和/或计算机视觉技术可包括,例如,边缘检测、角检测、斑点检测、卡尔曼滤波器、高斯混合模型、粒子滤波器、基于均值漂移的核跟踪、ML对象检测技术(例如,Viola-Jones对象检测框架、尺度不变特征变换(scale-invariant feature transform,SIFT)、有向梯度直方图(histogram of orientedgradient,HOG)等)、深度学习对象检测技术(例如,全卷积神经网络(fully convolutionalneural network,FCNN)、区域建议卷积神经网络(region proposal convolution neuralnetwork,R-CNN)、单发多盒检测器(single shot multibox detector)、“你只看一次”(youonly look once,YOLO)算法等)等。
在另一个示例中,ML/AI技术被用于基于从一个或多个传感器获得的y传感器数据的运动检测。附加地或替代地,ML/AI技术被用于对象检测和/或分类。对象检测或识别模型可以包括登记阶段和评估阶段。在登记阶段期间,从传感器数据(例如,图像或视频数据)中提取一个或多个特征。特征是单独的可测量属性或特性。在对象检测的上下文中,对象特征可包括对象大小、颜色、形状、与其他对象的关系和/或图像的任何区域或部分,诸如边缘、脊、角、斑点和/或一些定义的感兴趣区域(region of interest,ROI)等。所使用的特征可以是特定于实现方式的,并且可以基于例如要检测的对象和要开发和/或使用的(一个或多个)模型。评估阶段涉及通过将获得的图像数据与登记阶段期间创建的现有对象模型进行比较来对对象进行标识或分类。在评估阶段期间,使用合适的模式识别技术将从图像数据中提取的特征与对象标识模型进行比较。对象模型可以是定性或功能性的描述、几何表面信息和/或抽象特征向量,并且可以存储在适当的数据库中,该数据库使用某种类型的索引方案来组织,以促进从考虑中消除不太可能的对象候选。
任何(一种或多种)合适的数据融合和数据集成技术可用于生成复合信息。例如,数据融合技术可以是直接融合技术或间接融合技术。直接融合将直接从多个vUE或传感器采集到的数据进行组合,这些数据可以是相同或类似的(例如,所有vUE或传感器执行同一类型的测量)或者是不同的(例如,不同的vUE或传感器类型、历史数据等)。间接融合利用历史数据和/或环境的已知属性和/或人类输入来产生改良的数据集。附加地,数据融合技术可以包括一种或多种融合算法,诸如平滑化算法(例如,实时或非实时地使用多个测量来对值进行估计)、过滤算法(例如,利用当前测量和过去测量实时地估计实体的状态)、和/或预测状态估计算法(例如,实时地分析历史数据(例如,地理位置、速度、方向和信号测量)以预测状态(例如,特定地理位置坐标处的未来信号强度/质量))。作为示例,数据融合算法可以是或可包括基于结构化的算法(例如,基于树的(例如,最小生成树(Minimum SpanningTree,MST))、基于聚类的、基于网格和/或基于集中化的)、无结构的数据融合算法、卡尔曼滤波器算法和/或扩展卡尔曼滤波、基于模糊的数据融合算法、蚁群优化(Ant ColonyOptimization,ACO)算法、故障检测算法、基于Dempster-Shafer(D-S)论证的算法、高斯混合模型算法、基于三角测量的融合算法和/或任何其他类似的数据融合算法。
本地感知功能(其可包括或可以不包括(一个或多个)轨迹预测应用)602、702和802通过对由关联至系统元件的(一个或多个)本地传感器收集的信息的本地处理来提供。本地感知(和轨迹预测)功能602、702和802消费传感器数据融合应用/功能604、704和804的输出,并且向ITS-S应用馈送感知数据(和/或轨迹预测)。本地感知(和轨迹预测)功能602、702和802检测和表征所考虑的移动对象中可能跨越该轨迹的对象(静态的和移动的)。基础设施(并且具体地,道路基础设施800)可提供与VRU支持服务有关的服务。基础设施可具有其自身的传感器,这些传感器检测VRU 116/117演变,并且如果还经由其自身的传感器直接地或经由协作感知支持服务(诸如CPS)远程地检测到本地交通工具的演变,则计算碰撞的风险(参见例如,ETSI TR 103 562)。附加地,由于VRU 116/117通常必须遵守道路标记(例如,斑马线区域或人行横道)和垂直标志,因此可以考虑这些标记/标志以提高与VRU检测和移动性相关联的置信度水平。
运动动力学预测功能603和703以及移动对象轨迹预测803(在RSU级)与所考虑的移动的对象的行为预测相关。运动动力学预测功能603和703分别预测交通工具110和VRU116的轨迹。运动动力学预测功能603可以是V-ITS-S110的VRU轨迹和行为建模模块和轨迹拦截模块的部分。运动动力学预测功能703可以是VRU ITS-S 117的航位推测模块和/或移动检测模块的部分。替代地,运动动力学预测功能603和703可向前述模块提供运动/移动预测。附加地或替代地,移动对象轨迹预测803预测对应的交通工具110和VRU 116的相应轨迹,这可用于辅助VRU ITS-S 117执行航位推测和/或辅助具有VRU轨迹和行为建模实体的V-ITS-S 110。
运动动力学预测包括从连续的移动位置的演变得到的移动对象轨迹。移动对象轨迹的改变或移动对象速度(加速度/减速度)的改变影响运动动力学预测。在大多数情况下,当VRU 116/117正在移动时,它们在可能的轨迹和速度方面仍具有大量可能的运动动力学。这意味着运动动力学预测603、703、803用于尽可能快地标识哪个运动动力学将被VRU 116选择以及此种选定的运动动力学是否受到与另一VRU或交通工具碰撞的风险。
运动动力学预测功能603、703、803分析移动对象的演变和在给定时间可能相遇的潜在轨迹,以确定这些移动对象之间碰撞的风险。运动动力学预测考虑以下各项而对协作感知的输出起作用:针对路径预测的计算,所考虑的设备(例如,VRU设备117)的当前轨迹;针对速度演变预测的计算,所考虑的移动对象的当前速度及其过去演变;以及可以关联至这些变量的可靠性水平。此种功能的输出被提供至风险分析功能(参见例如,图2)。
在许多情况下,由于VRU轨迹选择及其速度方面存在不确定性,仅对协作感知的输出起作用不足以作出可靠的预测。然而,互补功能可辅助一致地提高预测的可靠性。例如,设备(例如,VRU设备117)导航系统的使用,该设备导航系统向用户(例如,VRU 116)提供辅助以选择到达其计划目的地的最佳轨迹。随着移动性即服务(MaaS)的发展,多模式行程计算也可以向VRU 116指示危险区域,并且随后辅助由系统提供的多模式行程级别下的运动动力学预测。在另一示例中,用户(例如,VRU 116)习惯和行为的知识可附加地或替代地用于改善运动预测的一致性和可靠性。例如在前往与其主要活动(例如,上学、去工作、购物、去离家最近的公共交通站、去体育中心等)有关的主要兴趣点(Point of Interest,POI)时,一些用户(例如,VRU 116/117)使用类似的运动动力学遵循相同的行程。设备(例如,VRU设备117)或远程服务中心可学习并记住这些习惯。在另一示例中,尤其是在改变轨迹时(例如,在指示方向的改变时使用与交通工具类似的右转或左转信号),用户(例如,VRU116)自身对其选定的轨迹进行指示。
交通工具运动控制608可被包括以用于计算机辅助和/或自动化交通工具110。HMI实体606和交通工具运动控制实体608两者均可由一个或多个ITS-S应用触发。交通工具运动控制实体608可以是担负人类驾驶员的或交通工具(如果其能够在自动化模式下驾驶)的责任的功能。
人机接口(Human Machine Interface,HMI)606、706和806当存在时使得能够配置管理实体(例如,VRU简档管理)中和其他功能(例如,VBS管理)中的初始数据(参数)。HMI606、706和806使得能够将与VBS有关的外部事件传输至设备所有者(用户),这些外部事件包括:关于由系统的至少一个元件检测到立即碰撞风险(TTC<2s)而作出警报、以及以信号通知由系统的至少一个元件检测到碰撞风险(例如,TTC>2秒)。对于VRU系统117(例如,个人计算系统700)(类似于交通工具驾驶员),HMI考虑到其简档而向VRU 116提供信息(例如,对于盲人,信息使用个人计算系统700的特定平台的可访问性能力以清晰声级被呈现)。在各实现方式中,HMI 606、706和806可以是警报系统的部分。
连接的系统607、707和807是指用于将系统与一个或多个其他系统连接的组件/设备。作为示例,连接的系统607、707和807可包括通信电路和/或无线电单元。VRU系统700可以是由最多4个不同级别的装备组成的连接的系统。VRU系统700还可以是实时地收集从事件得到的信息、处理所收集的信息并将其与经处理的结果一起存储的信息系统。在VRU系统700的每个级别处,信息收集、处理和存储与实现的功能和数据分发场景有关。
5.计算机辅助和自主驾驶平台和技术
除了本公开的UVCS技术之外,车载系统101和CA/AD交通工具110在其他方面可以是数个车载系统和CA/AD交通工具中的任一者,从计算机辅助交通工具到部分自主交通工具或完全自主交通工具。附加地,车载系统101和CA/AD交通工具110可包括图1未示出的其他组件/子系统,诸如本文中的其他地方示出和描述的元件(参见例如,图12)。将参考剩余图9-图11进一步描述用于实现车载系统101的底层UVCS技术的这些和其他方面。
图9图示出UVCS接口900。UVCS接口900是被设计成用于将可插拔计算模块(具有计算元件,诸如CPU、存储器、存储装置、无线电等)耦合至预先设置在交通工具中的车载计算中枢或子系统(具有外围组件,诸如电源、管理、I/O设备、汽车接口、热解决方案等)以形成交通工具的UVCS的实例的模块化的系统接口。可以采用具有不同计算元件或不同功能或能力的计算元件的不同可插拔计算模块来与预先设置在交通工具中的车载计算中枢/子系统接配,从而形成不同的UVCS实例。因此,具有预先设置的车载计算中枢/子系统的交通工具的计算能力可以通过使更新的、更多功能的或更有能力的可插拔计算模块替代先前老的、较少功能的或不太有能力的可插拔计算模块与预先设置的车载计算中枢/子系统进行接配来升级。
在图9的示例中,UVCS 900包括固定部分902和可配置部分904。固定部分902包括动态功率输入接口912(也被称为动态功率递送接口)以及管理通道接口914。可配置部分904包括数个可配置的I/O(configurable I/O,CIO)块916a-916n。
动态功率输入接口912被布置成将来自车载计算中枢/子系统的功率递送到插入UVCS接口900的可插拔计算模块的计算元件,以与车载计算中枢接配从而形成UVCS的实例。管理通道接口914被布置成用于促进车载计算中枢管理/协调自身和插入UVCS接口900的可插拔计算模块的操作,以形成UVCS的实例。CIO块916a-916n被布置成用于促进可插拔计算模块的各种计算元件与通过UVCS接口900彼此接配的车载计算中枢/子系统的外围组件之间的各种I/O,以形成UVCS的实例。取决于用于与车载计算中枢接配以形成UVCS的特定实例的可插拔计算模块的计算元件,可插拔计算模块的计算元件与接配的车载计算中枢/子系统的外围组件之间的I/O在各实例之间有所不同。CIO块916a-916n中的至少一些CIO块被布置为用于促进高速接口。
CIO块916a-916n表示一组电气上类似的高速、差分串行接口,允许视情况而定地配置实际使用的接口类型和标准。以此种方式,不同的UVCS计算中枢可以将不同的外围设备连接至同一个UVCS接口900,并允许不同的外围设备以不同的I/O协议与UVCS模块的计算元件进行I/O操作。
CIO块916a-916n的数量可能取决于特定用例和/或针对不同的细分市场而有所不同。例如,对于针对较低端市场而设计的实现方式而言,可能存在很少(例如2至4个)的CIO块916a-916n。另一方面,对于针对较高端市场而设计的实现方式而言,可能存在更多(例如8至16个)的CIO块916a-916n。然而,为了实现最高可能的互操作性和可升级性,对于给定的UVCS世代而言,多个CIO块的数量和功能/可配置性可以保持不变。
图10图示出使用UVCS接口形成的示例UVCS 1000。如所示,UVCS接口(其可以是UVCS接口900)用于促进可插拔的UVCS模块与预先设置在交通工具中的UVCS中枢的接配,以形成用于交通工具的UVCS 1000,该UVCS 1000可以是图1的车载系统101的一个或多个UVCS中的一个UVCS。UVCS接口如同UVCS接口900那样包括固定部分和可配置部分。固定部分包括动态功率递送接口(dynamic power delivery,DynPD)1032和管理通道(management,MGMT)接口1034。可配置部分包括数个可配置的I/O接口(CIO):PCIe1..x、CIO1..x、CIOy..z、CIOa..b、CIOc..d。
预先设置的UVCS中枢包括电源和系统管理控制器。进一步地,UVCS中枢包括如所示的调试接口1044、接口设备、电平移位器以及耦合至电源、系统管理控制器并且彼此耦合的数个外围组件1052,诸如音频和放大器、相机接口、汽车网络接口、其他接口、显示接口、面向客户接口(例如,USB接口)、和通信接口(例如,
可插拔的UVCS模块1006包括SoC(例如CPU、GPU、FPGA或其他电路)、存储器、功率输入+供给电路、内务处理控制器和(一个或多个)CIO多路复用器(multiplexer,MUX)。进一步地,如所示,UVCS模块包括耦合至前面列举的元件并彼此耦合的硬件加速器、持久性大容量存储装置和通信模块(例如,BT、WiFi、5G/NR、LTE和/或其他类似的接口)。附加地或替代地,UVCS模块可以包括更多或更少的计算元件,或者包括不同的计算元件。
UVCS中枢的电源经由UVCS接口的DynPD 1032和UVCS模块的功率输入+供给电路向UVCS模块的计算元件递送功率。UVCS中枢的系统管理控制器经由UVCS接口的管理通道1034和UVCS模块的内务处理控制器来管理和协调其操作和UVCS模块的计算元件的操作。CIOMUX可被配置或可操作用于经由UVCS接口的可配置的I/O块、接口设备和UVCS中枢的电平移位器在UVCS模块的计算元件与UVCS中枢的外围组件之间提供多个不同I/O协议的I/O通道。例如,I/O通道中的一个I/O通道可以根据PCIe I/O协议在UVCS模块的计算元件与UVCS中枢的外围组件之间提供I/O。另一个I/O通道可以根据USB I/O协议在UVCS模块的计算元件与UVCS中枢的外围组件之间提供I/O。另外的其他I/O通道根据其他高速串行或并行I/O协议在UVCS模块的计算元件与UVCS中枢的外围组件之间提供I/O。
内务处理控制器可被配置或可操作用于基于交通工具的操作情境(例如,交通工具是否处于“冷曲轴”或“冷启动”场景)来在其向静态负载和动态负载的功率递送中对功率供给进行控制,并且控制静态负载和动态负载的功耗。内务处理控制器可被配置或可操作用于通过选择性地发起睡眠状态、降低时钟频率、或对静态负载和动态负载断电来控制静态负载和动态负载的功耗。
管理通道1034可以是小型低引脚数串行接口、通用异步收发机(UniversalAsynchronous Receiver-Transmitter,UART)接口、通用同步和异步收发机(UniversalSynchronous and Asynchronous Receiver-Transmitter,USART)接口、USB接口或某种其他合适的接口(包括本文讨论的其他IX技术中的任何一种)。附加地或替代地,管理通道可以是并行接口,诸如IEEE 1284接口。
UVCS接口的CIO块表示一组电气上类似的高速接口(例如,高速差分串行接口),从而允许视情况而定地配置实际使用的接口类型和标准。具体而言,内务处理控制器被布置成用于配置CIO MUX以通过各个CIO块提供多个I/O通道,以促进采用不同I/O协议的I/O操作。附加地或替代地,多个I/O通道包括USB I/O通道、PCIe I/O通道、HDMI和DP(DDI)I/O通道以及Thunderbolt(TBT)I/O通道。多个I/O通道还可以包括在所列举的I/O通道类型之外的其他I/O通道类型(xyz[1...r])。
附加地或替代地,CIO多路复用器包括可被配置用于将由SoC暴露的任何给定的I/O接口组合复用到所连接的CIO块中的任一个CIO块的足够的电路路径。附加地或替代地,诸如当CIO块支持有限数量的I/O协议(例如,支持显示接口和Thunderbolt,而不提供PCIe支持)时,CIO MUX可以提供有限的复用方案。在一些实现方式中,CIO MUX可以被集成为SoC的一部分。
UVCS中枢的系统管理控制器和UVCS模块的内务处理控制器可被配置或可操作用于在UVCS中枢和UVCS模块的初始配对期间协商功率预算或合同。附加地或替代地,功率预算/合同可以提供UVCS模块的最小和最大电压、电流/功率需求以及UVCS接口的电流功率递送限制(如果有的话)。这允许对给定的一对UCS中枢和模块的兼容性进行评定,并允许操作益处。
图11图示利用UVCS形成的示例车载系统的软件组件视图。如所示,可以利用UVCS1000形成的车载系统1100包括硬件1102和软件1110。软件1110包括主控数个虚拟机(virtual machine,VM)1122-1128的管理程序1112。管理程序1112可被配置或可操作用于主控VM 1122-1128的执行。管理程序1112还可以实现前面针对UVCS模块的系统管理控制器描述的一些或全部功能。作为示例,管理程序1112可以是KVM管理程序、由Citrix公司提供的Xen、由VMware公司提供的VMware和/或任何其他合适的管理程序或VM管理器(VMmanager,VMM)技术,诸如本文讨论的那些技术。VM 1122-1128包括服务VM 1122和数个用户VM 1124-1128。服务机1122包括服务OS,该服务OS主控数个仪表盘应用1132的执行。例如,服务VM 1122的服务OS以及用户VM 1124-1128的用户OS可以是例如可从北卡罗来纳州罗利市的Red Hat公司获得的Linux、可从加利福尼亚州山景城的谷歌公司获得的Android和/或诸如本文中讨论的那些OS之类的任何其他合适的OS。
用户VM 1124-1128可包括:第一用户VM 1124,具有主控前排座位信息娱乐应用1134的执行的第一用户OS;第二用户VM 1126,具有主控后排座位信息娱乐应用1136的执行的第二用户OS;第三用户VM 1128,具有主控ITS-S子系统1150的执行的第三用户OS和/或任何其他合适的OS/应用,诸如本文所讨论的那些。在一些实现方式中,VM 1122-1126可以是或者可以包括可使用合适的OS级虚拟化技术来实现的隔离的用户空间实例(诸如容器、分区、虚拟环境(virtual environment,VE)等)。
6.计算系统和硬件配置
图12描绘了可实现本文中所讨论的计算节点或设备中的任一者的示例边缘计算系统和环境。边缘计算节点1250可以被具体化为能够与其他边缘组件、联网组件或端点组件进行通信的某种类型的设备、装置、计算机或其他“物”。例如,边缘计算设备1250可以被具体化为智能电话、移动计算设备、智能装置、车载计算系统(例如,导航系统)、或能够执行所描述的功能的其他设备或系统。
图12图示出可存在于边缘计算节点1250中的、用于实现本文中所描述的技术(例如,操作、过程、方法和方法论)的组件的示例。当被实现为计算设备(例如,被实现为移动设备、基站、服务器、网关、基础设施设备、路边单元(road side unit,RSU)或R-ITS-S 130、无线电头端、中继站、服务器和/或本文讨论的任何其他元件/设备)或被实现为计算设备的部分时,该边缘计算节点1250提供了节点1250的相应组件的更靠近的视图。边缘计算节点1250可包括本文中所引用的硬件或逻辑组件的任何组合,并且该边缘计算节点1250可包括可与边缘通信网络或此类网络的组合一起使用的任何设备或与该任何设备耦合。这些组件可被实现为IC、IC的部分、分立电子器件或其他模块、指令集、可编程逻辑或算法、硬件、硬件加速器、软件、固件、或其在边缘计算节点1250中适配的组合,或者被实现为以其他方式被并入在更大的系统的机架内的组件。
边缘计算节点1250包括以一个或多个处理器1252形式的处理电路。处理器电路1252包括电路,诸如但不限于一个或多个处理器核心以及以下各项中的一项或多项:缓存存储器、低压差电压调节器(low drop-out voltage regulator,LDO)、中断控制器、串行接口(诸如SPI、I2C或通用可编程串行接口电路)、实时时钟(real time clock,RTC)、定时器-计数器(包括间隔定时器和看门狗定时器)、通用I/O、存储器卡控制器(诸如安全数字/多媒体卡(secure digital/multi-media card,SD/MMC)或类似物)、接口、移动工业处理器接口(mobile industry processor interface,MIPI)接口、以及联合测试接入小组(JointTest Access Group,JTAG)测试接入端口。在一些实现方式中,处理器电路1252可包括一个或多个硬件加速器(例如,与加速电路1264相同或类似),该硬件加速器可以是微处理器、可编程处理设备(例如,FPGA、ASIC)等等。一个或多个加速器可包括例如计算机视觉和/或深度学习加速器。在一些实现方式中,处理器电路1252可包括片上存储器电路,该片上存储器电路可包括任何合适的易失性和/或非易失性存储器,诸如DRAM、SRAM、EPROM、EEPROM、闪存、固态存储器、和/或诸如本文中所讨论的那些存储器设备技术之类的任何其他类型的存储器设备技术。
处理器电路1252可以包括,例如一个或多个处理器核心(CPU)、应用处理器、GPU、RISC处理器、Acorn RISC机器(ARM)处理器、CISC处理器、一个或多个DSP、一个或多个FPGA、一个或多个PLD、一个或多个ASIC、一个或多个基带处理器、一个或多个射频集成电路(radio-frequency integrated circuit,RFIC)、一个或多个微处理器或控制器、多核心处理器、多线程处理器、超低压处理器、嵌入式处理器、或任何其他已知的处理元件、或其任何合适的组合。处理器(或核心)1252可与存储器/存储装置耦合或者可包括存储器/存储装置,并且可被配置成用于执行存储器/存储装置中所存储的指令以使得各种应用或操作系统能够在节点1250上运行。处理器(或核心)1252被配置成用于操作应用软件以向节点1250的用户提供特定服务。附加地或替代地,(一个或多个)处理器1252可以是被配置成(或可被配置)用于根据上文中第1-4节的讨论来操作的(一个或多个)专用处理器/(一个或多个)专用控制器。
(一个或多个)处理器1252可通过互连(interconnect,IX)1256与系统存储器1254通信。可使用任何数量的存储器设备来提供给定量的系统存储器。作为示例,存储器可以是根据联合电子器件工程委员会(Joint Electron Devices Engineering Council,JEDEC)设计的随机存取存储器(random access memory,RAM),诸如DDR或移动DDR标准(例如,LPDDR、LPDDR2、LPDDR3或LPDDR4)。在特定示例中,存储器组件可符合JEDEC颁布的DRAM标准,诸如针对DDR SDRAM的JESD79F、针对DDR2 SDRAM的JESD79-2F、针对DDR3 SDRAM的JESD79-3F、针对DDR4 SDRAM的JESD79-4A、针对低功率DDR(Low Power DDR,LPDDR)的JESD209、针对LPDDR2的JESD209-2、针对LPDDR3的JESD209-3和针对LPDDR4的JESD209-4。还可包括其他类型的RAM,诸如动态RAM(dynamic RAM,DRAM)、同时DRAM(synchronous DRAM,SDRAM)等等。此类标准(和类似的标准)可被称为基于DDR的标准,并且实现此类标准的存储设备的通信接口可被称为基于DDR的接口。在各实现方式中,各个存储器设备可以是任何数量的不同封装类型,诸如单管芯封装(ingle die package,SDP)、双管芯封装(dual diepackage,DDP)或四管芯封装(quad die package,QDP)。在一些示例中,这些设备可以直接焊接到主板上,以提供薄型解决方案,而在其他示例中,设备被配置为一个或多个存储器模块,这一个或多个存储器模块进而通过给定的连接器耦合至主板。可使用任何数量的其他存储器实现方式,诸如其他类型的存储器模块,例如,不同种类的双列直插存储器模块(dual inline memory module,DIMM),包括但不限于microDIMM(微DIMM)或MiniDIMM(迷你DIMM)。
为了提供对信息(诸如数据、应用、操作系统等)的持久性存储,存储装置1258还可经由IX 1256而耦合至处理器1252。在示例中,存储装置1258可经由固态盘驱动器(solid-state disk drive,SSDD)和/或高速电可擦除存储器(共同被称为“闪存”)来实现。可用于存储装置1258的其他设备包括闪存卡(诸如SD卡、microSD卡、XD图片卡,等等)和USB闪存驱动器。在示例中,存储器设备可以是或者可以包括使用硫属化物玻璃的存储器设备,多阈值级别NAND闪存,NOR闪存,单级或多级相变存储器(Phase Change Memory,PCM),电阻式存储器,纳米线存储器,铁电晶体管随机存取存储器(ferroelectric transistor randomaccess memory,FeTRAM),反铁电存储器,包含忆阻器技术的磁阻随机存取存储器(magnetoresistive random access memory,MRAM),相变RAM(phase change RAM,PRAM),包括金属氧化物基底、氧空位基底和导电桥随机存取存储器(conductive bridge RandomAccess Memory,CB-RAM)的电阻式存储器,或自旋转移力矩(spin transfer torque,STT)-MRAM,基于自旋电子磁结存储器的设备,基于磁隧穿结(magnetic tunneling junction,MTJ)的设备,基于畴壁(Domain Wall,DW)和自旋轨道转移(Spin Orbit Transfer,SOT)的设备,基于晶闸管的存储器设备,或者任何上述的组合或其他存储器。存储器电路1254和/或存储装置电路1258还可包含来自
在低功率实现方式中,存储装置1258可以是与处理器1252相关联的管芯上存储器或寄存器。然而,在一些示例中,存储装置1258可使用微硬盘驱动器(hard disk drive,HDD)来实现。此外,附加于或替代所描述的技术,可将任何数量的新技术用于存储装置1258,这些新技术诸如阻变存储器、相变存储器、全息存储器或化学存储器,等等。
存储装置电路1258存储用于实现本文中描述的技术的软件、固件或硬件命令形式的计算逻辑1282(或“模块1282”)。可采用计算逻辑1282来存储计算机程序或用于创建计算机程序的数据的工作副本和/或永久副本,以用于节点1250的各组件(例如,驱动器等)、节点1250的OS、和/或一个或多个应用的操作,以用于执行本文中讨论的功能。计算逻辑1282可作为指令1282或用于创建指令1282的数据被存储或被加载到存储器电路1254中,用于由处理器电路1252执行以提供本文中所描述的功能。各种元件可由受处理器电路1252支持的汇编器指令或可被编译成此类指令(例如,指令1282或用于创建指令1282的数据)来实现。编程指令的永久副本可在工厂中或在现场通过例如分发介质(未示出)、通过通信接口(例如,从分发服务器(未示出))、和/或空中下载(over-the-air,OTA)被置于存储装置电路1258的持久性存储设备中。
在示例中,经由图12的存储器电路1254和/或存储装置电路1258提供的指令1283、1282被具体化为包括程序代码、计算机程序产品或用于创建计算机程序的数据一个或多个非暂态计算机可读存储介质(参见例如,NTCRSM1260),其中计算机程序或数据用于指引节点1250的处理器电路1252在节点1250中执行电子操作和/或执行特定的动作序列或动作流,例如,如参考先前所描绘的操作和功能的(一个或多个)流程图和(一个或多个)框图所描述的。处理器电路1252通过互连1256来访问一个或多个非暂态计算机可读存储介质。
附加地或替代地,可将编程指令(或用于创建指令的数据)设置在多个NTCRSM1260上。附加地或替代地,可将编程指令(或用于创建指令的数据)设置在计算机可读暂态存储介质(诸如信号)上。可使用传输介质,经由网络接口设备,利用数种传输协议中的任何一种协议(例如,HTTP),进一步通过通信网络来传送或接收由机器可读介质具体化的指令。可以利用一种或多种计算机可用或计算机可读介质的任何组合。计算机可用或计算机可读介质例如可以是但不限于一个或多个电子、磁、光、电磁、红外或半导体系统、装置、设备或传播介质。例如,NTCRSM 1260可由针对存储装置电路1258和/或存储器电路1254所描述的设备来具体化。计算机可读介质的更具体的示例(非排他性列表)包括下述项:具有一条或多条线的电连接件、便携式计算机磁盘、硬盘、随机存取存储器(random access memory,RAM)、只读存储器(read-only memory,ROM)、可擦除可编程只读存储器(erasableprogrammable read-only memory,EPROM或闪存)、光纤、便携式致密盘只读存储器(compact disc read-only memory,CD-ROM)、光存储设备和/或光盘、诸如支持因特网或内联网的那些传输介质之类的传输介质、磁存储设备、或任何数量的其他硬件设备。注意,计算机可用或计算机可读介质可甚至是其上打印有程序(或用于创建程序的数据)的纸张或另一合适的介质,因为程序(或用于创建程序的数据)可经由例如对纸张或其他介质的光学扫描而被电子地捕获,然后在必要的情况下适当地被编译、解释或以其他方式被处理,并且然后被存储在计算机存储器中(在已经被暂存(stage)或并未被暂存在一个或多个中间存储介质中的情况下)。在本文档的情境中,计算机可用或计算机可读介质可以是可以包含、存储、传达、传播、或传输程序(或用于创建程序的数据)以供指令执行系统、装置或设备使用或结合指令执行系统、装置或设备一起使用的任何介质。计算机可用介质可包括传播的数据信号以及随其体现在基带中或作为载波的一部分的计算机可用程序代码(或用于创建程序代码的数据)。可使用任何适当的介质来传送计算机可用程序代码(或用于创建程序的数据),合适的介质包括但不限于无线、线缆、光纤电缆、RF等。
本文中所描述的程序代码(或用于创建程序代码的数据)可以以压缩格式、加密格式、分段格式、封装格式等中的一种或多种格式来存储。本文中描述的程序代码(或用于创建程序代码的数据)可能要求安装、修改、适配、更新、组合、补充、配置、解密、解压缩、拆包、分发、重新分派等中的一项或多项,以使得它们可直接由计算设备和/或其他机器读取和/或执行。例如,程序代码(或用于创建程序代码的数据)可被存储在多个部分中,这些部分单独地被压缩、被加密并被存储在分开的计算设备上,其中,这些部分在被解密、被解压缩和被组合时形成实现诸如本文中所描述的程序代码(用于创建程序代码的数据)的一组可执行指令。在另一示例中,程序代码(或用于创建程序代码的数据)可以以它们可被计算机读取所处于的状态被存储,但是要求添加库(例如,动态链接库)、软件开发工具包(softwaredevelopment kit,SDK)、应用编程接口(application programming interface,API)等,以便在特定的计算设备或其他设备上执行指令。在另一示例中,在可整体地或部分地执行/使用程序代码(或用于创建程序代码的数据)之前,可能需要配置程序代码(或用于创建程序代码的数据)(例如,存储的设置、输入的数据、记录的网络地址等)。在该示例中,程序代码(或用于创建程序代码的数据)可被拆包,被配置成用于恰当的执行,并且被存储在第一位置,其中配置指令位于区别于第一位置的第二位置。配置指令可由动作、触发器、或不与实现所公开的技术的指令共同位于存储或执行位置的指令发起。相应地,所公开的程序代码(或用于创建程序代码的数据)旨在包含此类机器可读指令和/或(一个或多个)程序(或用于创建此类机器可读指令和/或程序的数据),而不管机器可读指令和/或(一个或多个)程序在被存储或以其他方式处于静态或在运送中时的特定格式或状态如何。
用于执行本公开的操作(例如,先前所讨论的计算逻辑1283、指令1282、指令1281)的计算机程序代码可以以一种或多种编程语言的任何组合来编写,这些编程语言包括:面向对象的编程语言,诸如Python、Ruby、Scala、Smalltalk、Java
在示例中,处理器电路1252上的指令1281(单独地,或与存储在计算机可读介质中的指令1282和/或逻辑/模块1283组合地)可配置受信任执行环境(trusted executionenvironment,TEE)1290的执行或操作。TEE 1290操作为可由处理器电路1252访问的受保护区域以实现对数据的安全访问以及指令的安全执行。
TEE 1290可以是与系统1250的其他组件分开的物理硬件设备,这些组件诸如安全嵌入式控制器、专用SoC、或防篡改小芯片、或具有嵌入式处理设备和存储器设备的微控制器。
TEE 1290可实现为安全飞地,这些安全飞地是系统1250的处理器和/或存储器/存储装置电路内的代码和/或数据的隔离区域。仅在安全飞地内被执行的代码可访问同一安全飞地内的数据,并且该安全飞地仅可使用安全应用(其可由应用处理器或防篡改微控制器实现)访问。可以提供TEE 1290的各种实现方式,以及处理器电路1252或存储器电路1254和/或存储装置电路1258中的伴随安全区域。可以通过TEE 1290和处理器电路1252在设备1250中实现安全强化、硬件信任根和受信任或受保护操作的其他方面。
附加地或替代地,存储器电路1254和/或存储装置电路1258可被划分为隔离的用户空间实例(诸如容器、分区、虚拟环境(virtual environment,VE)等)。隔离的用户空间实例可以使用合适的OS级虚拟化技术来实现,诸如容器、区域、虚拟私有服务器、虚拟内核和/或监狱(jail)、chroot监狱等等。虚拟机器还可用于一些实现方式中。附加地或替代地,存储器电路1254和/或存储装置电路1258可被划分为一个或多个受信任存储器区域,以用于存储TEE1290的应用或软件模块。
虽然指令1282被示出为存储器电路1254中所包括的代码块并且计算逻辑1283被示出为存储装置电路1258中的代码块,但应当理解,这些代码块中的任何代码块可以以硬连线电路来代替,例如,被构建成FPGA、ASIC或某个其他合适的电路。例如,在处理器电路1252包括(例如,基于FPGA的)硬件加速器以及处理器核心的情况下,硬件加速器(例如,FPGA单元)可被预配置有前述的计算逻辑(例如,预配置有适当的比特流)以执行先前所讨论的功能中的一些或全部(代替采用要由(一个或多个)处理器核心执行的编程指令)。
存储器电路1254和/或存储装置电路1258可存储操作系统(operating system,OS)的程序代码,该操作系统可以是通用OS或为计算平台1250专门编写的并被定制成用于计算节点1250的OS。例如,OS可以是桌面型电脑OS、上网本OS、交通工具OS、移动OS、实时OS(real-time OS,RTOS)和/或某种其他合适的OS,诸如本文所讨论的那些OS。
OS可包括操作以控制特定设备的一个或多个驱动器,这些特定设备被嵌入在节点1250中、被附连至节点1250、或以其他方式与节点1250通信地耦合。驱动器可包括允许节点1250的其他组件与各种I/O设备交互或控制各种I/O设备的各个驱动器,这些I/O设备可存在于节点1250内或连接至节点1250。例如,驱动器可包括用于控制和允许对显示设备的访问的显示驱动器、用于控制和允许对节点1250的触摸屏接口的访问的触摸屏驱动器、用于获取传感器电路1272的传感器读数并且控制和允许对传感器电路1272的访问的传感器驱动器、用于获取致动器1274的致动器位置和/或控制和允许对致动器1274的访问的致动器驱动器、用于控制和允许对嵌入式图像捕获设备的访问的相机驱动器、用于控制和允许对一个或多个音频设备的访问的音频驱动器。OS还可包括为一个或多个应用提供程序代码和/或软件组件以获得并使用来自安全执行环境、受信任执行环境、和/或节点1250的管理引擎(未示出)的数据的一个或多个库、驱动器、API、固件、中间件、软件粘合件等。
边缘计算设备1250的组件可通过IX 1256进行通信。IX 1256可包括任何数量的总线和/或互连(IX)技术,诸如工业标准体系结构(industry standard architecture,ISA)、扩展ISA(extended ISA,EISA)、内部集成电路(inter-integrated circuit,I2C)、串行外围接口(serial peripheral interface,SPI)、点到点接口、功率管理总线(powermanagement bus,PMBus)、外围组件互连(peripheral component interconnect,PCI)、PCI快速(PCI express,PCIe)、超路径接口(Ultra Path Interface,UPI)、加速器链路(Accelerator Link,IAL)、公共应用编程接口(Common Application ProgrammingInterface,CAPI)、快速路径互连(QuickPath interconnect,QPI)、超路径互连(UltraPath Interconnect,UPI)、全向路径体系结构(Omni-Path Architecture,OPA)IX、RapidIO系统IX、加速器缓存一致性互连(Cache Coherent Interconnect for Accelerators,CCIA)、Gen-Z联盟IX、开放一致性加速处理器接口(Open Coherent AcceleratorProcessor Interface,OpenCAPI)IX、超传输(HyperTransport)互连和/或任何数量的其他IX技术。IX技术可以是例如在基于SoC的系统中使用的专有总线。
IX 1256将处理器1252耦合至通信电路1266以用于与其他设备的通信,该其他设备诸如远程服务器(未示出)和/或连接的边缘设备1262。通信电路1266是硬件元件或硬件元件的集合,用于通过一个或多个网络(例如,云1263)通信和/或与其他设备(例如,边缘设备1262)通信。调制解调器电路126Z可以使用一个或多个无线电设备126X和126Y对数据进行转换以供空中传送,并且可以将来自无线电设备126X和126Y的接收信号转换为数字信号/数据以供系统1250的其他元件消费。
收发器1266可使用任何数量的频率和协议,诸如IEEE 802.15.4标准下的2.4千兆赫兹(Gigahertz,GHz)传输,使用如由
无线网络收发器1266(或多个收发器)可以使用用于不同范围的通信的多种标准或无线电来进行通信。例如,边缘计算节点1250可使用基于BLE或另一低功率无线电的本地收发器与接近的(例如,在约10米内的)设备通信以节省功率。更远的(例如,在约50米内的)连接的边缘设备1262可通过
可包括无线网络收发器1266(例如,无线电收发器),以经由局域网协议或广域网协议来与边缘云1263中的设备或服务通信。无线网络收发器1266可以是遵循IEEE802.15.4或IEEE 802.15.4g标准等的LPWA收发器。边缘计算节点1263可使用由Semtech和LoRa联盟开发的LoRaWAN
除了针对如本文中所描述的无线网络收发器1266而提及的系统之外,还可使用任何数量的其他无线电通信和协议。例如,收发器1266可包括使用扩展频谱(spreadspectrum,SPA/SAS)通信以实现高速通信的蜂窝收发器。进一步地,可使用任何数量的其他协议,诸如用于中速通信和提供网络通信的
鉴于从设备到另一组件或网络的可适用通信类型的多样性,由设备使用的可适用通信电路可以包括组件1264、1266、1268或1270中的任何一个或多个,或由组件1264、1266、1268或1270中的任何一个或多个来具体化。因此,在各示例中,用于通信(例如,接收、传送等)的可适用装置可由此类通信电路来具体化。
边缘计算节点1250可以包括或被耦合到加速电路1264,该加速电路1264可以由一个或多个AI加速器、神经计算棒、神经形态硬件、FPGA、GPU的布置、一个或多个SoC(包括可编程SoC)、一个或多个CPU、一个或多个数字信号处理器、专用ASIC(包括可编程ASIC)、诸如CPLD或HCPLD之类的PLD和/或被设计用于完成一个或多个专业化任务的其他形式的专业化处理器或电路来具体化。这些任务可以包括AI处理(包括机器学习、训练、推断、和分类操作)、视觉数据处理、网络数据处理、对象检测、规则分析等。在基于FPGA的实现方式中,加速电路1264可包括逻辑块或逻辑结构以及其他互连的资源,这些逻辑块或逻辑结构以及其他互连的资源可被编程(被配置)为用于执行如上文第1-4节中所讨论的各种功能,诸如过程、方法、功能等。在此类实现方式中,加速电路1264还可包括用于将逻辑块、逻辑结构、数据等存储在LUT等等中的存储器单元(例如,EPROM、EEPROM、闪存、静态存储器(例如,SRAM、反熔丝等))。
IX 1256还将处理器1252耦合至用于连接附加的设备或子系统的传感器中枢或外部接口1270。附加/外部设备可包括传感器1272、致动器1274、以及定位电路1245。
传感器电路1272包括其目的是检测其环境中的事件或其环境的改变并将关于检测到的事件的信息(传感器数据)发送到某个其他设备、模块、子系统等的设备、模块或子系统。此类传感器1272的示例尤其包括:惯性测量单元(inertia measurement unit,IMU),包括加速度计、陀螺仪、和/或磁力计;微机电系统(microelectromechanical system,MEMS)或纳机电系统(nanoelectromechanical system,NEMS),包括3轴加速度计、3轴陀螺仪和/或磁力计;液位传感器;流量传感器;温度传感器(例如,热敏电阻);压力传感器;气压传感器;重力仪;高度计;图像捕获设备(例如,相机);光检测和测距(light detection andranging,LiDAR)传感器;接近度传感器(例如,红外辐射检测器等等)、深度传感器、环境光传感器;光学光传感器;超声收发器;话筒;等等。
附加地或替代地,传感器172中的一些可以是用于各种交通工具控制系统的传感器,并且尤其可包括:排气传感器,该排气传感器包括用于获得氧气数据的排气氧传感器和用于获得歧管压力数据的歧管绝对压力(manifold absolute pressure,MAP)传感器;质量空气流量(mass air flow,MAF)传感器,用于获得进气流量数据;进气温度(intake airtemperature,IAT)传感器,用于获得IAT数据;环境空气温度(ambient air temperature,AAT)传感器,用于获得AAT数据;环境空气压力(ambient air pressure,AAP)传感器,用于获得AAP数据(例如,胎压数据);催化转化器传感器,包括用于获得催化转化器温度(catalytic converter temperature,CCT)数据的CCT传感器和用于获得催化转化器氧气(catalytic converter oxygen,CCO)数据的CCO传感器;交通工具速度传感器(vehiclespeed sensor,VSS),用于获得VSS数据;排气再循环(exhaust gas recirculation,EGR)传感器,包括用于获得ERG压力数据的EGR压力传感器和用于获得EGR阀枢轴的位置/定向数据的EGR位置传感器;节气门位置传感器(Throttle Position Sensor,TPS),用于获得节气门位置/定向/角度数据;曲柄/凸轮位置传感器,用于获得曲柄/凸轮位置/定向/角度数据;冷却液温度传感器;传动系传感器,用于收集传动系传感器数据(例如,变速器液位)、交通工具主体传感器,用于收集交通工具主体数据(例如,与前格栅/挡泥板、侧门、后挡泥板、后尾箱等的屈曲相关联的数据)等等。传感器172可包括其他传感器,诸如,加速器踏板位置传感器(accelerator pedal position,APP)、加速度计、磁力计、液位传感器、流量/流体传感器、气压传感器和/或任何其他(一个或多个)传感器(诸如本文中所讨论的那些)。来自主交通工具的传感器1272的传感器数据可包括由各种引擎传感器收集的引擎传感器数据(例如,引擎温度、油压等等)。
致动器1274允许节点1250改变其状态、位置和/或定向,或者移动或控制机制或系统。致动器1274包括用于移动或控制机制或系统的电设备和/或机械设备,并且将能量(例如,电流或移动的空气和/或液体)转换为某个种类的运动。致动器1274可包括一个或多个电子(或电化学)设备,诸如压电生物形态、固态致动器、固态继电器(solid state relay,SSR)、基于形状记忆合金的致动器、基于电活性聚合物的致动器、继电器驱动器集成电路(integrated circuit,IC),等等。致动器1274可包括一个或多个机电设备,诸如气动致动器、液压致动器、机电开关(包括机电继电器(electromechanical relay,EMR))、电动机(例如,DC电动机、步进电动机、伺服机构等)、功率开关、阀致动器、轮、推进器、螺旋桨、爪、夹具、挂钩、可听声音生成器、视觉警示设备、和/或其他类似的机电组件。节点1250可被配置成用于基于一个或多个捕获到的事件和/或从服务提供商和/或各种客户端系统接收到的指令或控制信号来操作一个或多个致动器1274。
附加地或替代地,致动器1274可以是驱动控制单元(例如,图1的DCU174),DCU1274的示例包括传动系统控制单元、引擎控制单元(Engine Control Unit,ECU)、引擎控制模块(Engine Control Module,ECM)、EEMS、动力系统控制模块(Powertrain ControlModule,PCM)、变速箱控制模块(Transmission Control Module,TCM)、包括防抱死制动系统(anti-lock brake system,ABS)模块和/或电子稳定控制(electronic stabilitycontrol,ESC)系统的制动控制模块(Body Control Module,BCM)、中央控制模块(CentralControl Module,CCM)、中央定时模块(Central Timing Module,CTM)、通用电子模块(General Electronic Module,GEM)、主体控制模块(Body Control Module,BCM)、悬架控制模块(Suspension Control Module,SCM)、门控制单元(Door Control Unit,DCU)、速度控制单元(Speed Control Unit,SCU)、人机接口(Human-Machine Interface,HMI)单元、远程信息处理控制单元(Telematic Control Unit,TTU)、电池管理系统、便携式排放测量系统(Portable Emissions Measurement System,PEMS)、规避操纵辅助(evasive maneuverassist,EMA)模块/系统和/或交通工具系统中的任何其他实体或节点。可由DCU 174生成的CSD的示例可包括但不限于,来自引擎控制模块(engine control module,ECM)的实时计算出的引擎负载值,诸如交通工具的引擎的每分钟引擎转数(revolutions per minute,RPM);引擎的一个或多个气缸和/或一个或多个喷射器的燃料喷射器激活定时数据、一个或多个气缸的点火火花定时数据(例如,相对于一个或多个气缸的曲柄角的火花事件的指示)、(可以由变速箱控制单元(transmission control unit,TCU)提供给ECM的)变速箱转动比数据和/或变速箱状态数据;等等。
在交通工具实现方式中,致动器/DCU 1274被供应有控制系统配置(controlsystem configuration,CSC),该控制系统配置(CSC)是用于控制和/或监测由节点1250(例如,当节点1250是CA/AD交通工具110时)实现的各个系统的软件模块、软件组件、逻辑块、参数、校准、变体等的集合。CSC定义DCU 1274如何使用多维性能图或查找表解释传感器1272的传感器数据和/或其他DCU 1274的CSD,并定义如何基于传感器数据调节/修改致动器/组件。可以使用任何合适的面向对象编程语言(例如,C、C++、java等)、模式语言(例如,XML模式、汽车开放系统体系结构(AUTomotive Open System Architecture,AUTOSAR)XML模式等)、脚本语言(VBScript、JavaScript等)等开发由各个DCU 1274执行的CSC和/或软件组件。可以使用硬件描述语言(hardware description language,HDL)来定义用于被实现为现场可编程设备(field-programmable device,FPD)的DCU 1274的CSC和软件组件,诸如寄存器传输逻辑(register-transfer logic,RTL)、超高速集成电路(very high speedintegrated circuit,VHSIC)HDL(VHDL)、Verilog等。CSC和软件组件可以使用建模环境或基于模型的开发工具生成。附加地或替代地,CSC可由一个或多个自主软件代理和/或AI代理基于学习到的经验、ODD和/或其他类似参数生成或更新。
IVS 101和/或DCU 1274可被配置或可操作用于基于一个或多个所捕获的事件(如由传感器1272捕获的传感器数据所指示)和/或从用户输入接收到的指令或控制信号、从服务提供商通过空中接收到的信号等来操作一个或多个致动器,等等。附加地,一个或多个DCU 1274可被配置或可操作用于通过基于检测到的事件(如传感器1272捕获的传感器数据所指示)向致动器传送/发送指令或控制信号来操作一个或多个致动器。一个或多个DCU1274能够从一个或多个传感器1272读取或以其他方式获取传感器数据,处理传感器数据以生成控制系统数据(或CSC),并将控制系统数据提供给一个或多个致动器以控制交通工具110的各种系统。充当中央控制器或中枢的嵌入式设备/系统还可以访问控制系统数据,以便使用合适的驱动器、API、ABI、库、中间件、固件和/或类似设备进行处理;和/或DCU 1274可以可被配置或可操作用于在周期性或非周期性的基础上和/或在被触发时向中央中枢和/或其他设备/组件提供控制系统数据。
各种子系统(包括传感器1272和/或DCU 1274)可由一个或多个AI代理操作和/或控制。AI代理是可被配置或可操作用于观察环境状况并确定为实现特定目标而要采取的动作的自主实体。要观察的特定环境状况和要采取的措施可基于操作设计域(operationaldesign domain,ODD)。ODD包括这样的操作条件:给定AI代理或其特征被专门设计成用于在这些操作条件下运行。ODD可包括操作限制,诸如环境、地理和一天中的时间限制、和/或某些交通或道路特征的必要存在或不存在。
各个AI代理可配置或可操作用于控制主交通工具的相应的控制系统,其中一些可涉及使用一个或多个DCU 1274和/或一个或多个传感器1272。基于控制系统本身,要采取的动作和要实现的特定目标可以是特定的或个性化的。附加地,动作或目标中的一些动作或目标可以是动态驾驶任务(dynamic driving task,DDT)、对象和事件检测与响应(objectand event detection and response,OEDR)任务,或者其他非交通工具操作相关的任务,这取决于AI代理在其中实现的特定情境。DDT包括在道路交通中操作交通工具110所需的所有实时操作和战术功能,不包括战略功能(例如,行程安排和目的地和航路点的选择)。DDT包括战术和操作任务,诸如经由转向进行的横向交通工具运动控制(操作任务);经由加速和减速进行的纵向交通工具运动控制(操作任务);经由对象和事件检测、识别、分类和响应准备来监测驾驶环境(操作和战术任务);对象和事件响应执行(操作和战术任务);操纵规划(战术任务);以及经由照明、发信号和做手势等增强醒目性(战术任务)。OEDR任务可能是DDT的子任务,包括监测驾驶环境(例如,对对象和事件进行检测、识别和分类,并根据需要准备响应)以及对此类对象和事件执行适当的响应,例如,根据需要完成DDT或回退任务。
为了观察环境状况,AI代理可被配置或可操作用于从一个或多个传感器1272接收传感器数据或针对该传感器数据进行监测,并从主交通工具110的一个或多个DCU 1274接收控制系统数据(control system data,CSD)。监测行为可包括从各个传感器172和DCU1274捕获CSD和/或传感器数据。监测可包括在指定/所选择的时间段内轮询(例如,周期性轮询、顺序(点名)轮询等)一个或多个传感器1272以获取传感器数据,和/或在指定/所选择的时间段内轮询(例如,周期性轮询、顺序(点名)轮询等)一个或多个DCU 1274以获取CSD。附加地或替代地,监测可包括响应于针对传感器数据/CSD的外部请求而发送针对传感器数据/CSD的请求或命令。附加地或替代地,监测可包括基于触发器或事件(诸如当主交通工具在预定的时间量内达到预定的速度和/或距离时(有或没有间歇停车)),等待来自各传感器/模块的传感器数据/CSD。事件/触发器可以是特定于AI代理的,并且可以根据特定应用、用例、实现方式而有所不同。附加地或替代地,监测可由IVS 101的应用或子系统或由远程设备(诸如计算节点140和/或(一个或多个)服务器160)触发或激活。
AI代理中的一个或多个可以可被配置或可操作用于处理传感器数据和CSD,以标识要采取动作的内部和/或外部环境状况。传感器数据的示例可包括但不限于,来自交通工具的一个或多个相机的图像数据,提供从交通工具向外看的正面、背面和/或侧面视图;来自交通工具的加速计、惯性测量单元(inertia measurement unit,IMU)和/或陀螺仪的传感器数据,提供主交通工具的速度、加速度和倾斜数据;由话筒提供的音频数据;以及由一个或多个控制系统传感器提供的控制系统传感器数据。在示例中,AI代理中的一个或多个可以可被配置或可操作用于处理由传感器1272(图像捕获设备)捕获的图像和/或评定由某一其他子系统(例如,EMA子系统、CAS和/或CPS实体等)标识的状况,以确定周围区域的状态或状况(例如,存在坑洼、倒下的树木/电线杆、路边护栏损坏、交通工具碎片等)。在另一示例中,AI代理中的一个或多个可以可被配置或可操作用于处理由一个或多个DCU 1274提供的CSD,以确定主交通工具的当前排放量或燃油经济性。AI代理还可以可被配置或可操作用于将传感器数据和/或CSD与训练集数据进行比较,以确定或有助于确定环境状况,以用于控制交通工具的相对应控制系统。
为了确定为实现特定目标而要采取的动作,每个AI代理都可被配置或可操作用于标识IVS 101、主交通工具110和/或AI代理自身的当前状态,标识或获取一个或多个模型(例如,ML模型),标识或获取目标信息,并基于当前状态/情境、一个或多个模型和目标信息来预测采取一个或多个操作的结果。一个或多个模型可以是在AI代理使用一个或多个训练数据集训练之后被创建的任何算法或对象,并且一个或多个模型可以指示基于当前状态可采取的可能动作。一个或多个模型可以基于为特定AI代理定义的ODD。当前状态是主交通工具110的IVS 101和/或一个或多个其他系统中的配置或信息集,或者是主交通工具110的IVS 101和/或一个或多个其他系统中各种状况的测量。当前状态存储在AI代理中,并在适当的数据结构中被维护。AI代理可被配置或可操作用于预测由于采取模型定义的某些动作而可能产生的后果。目标信息描述了给定当前状态的情况下符合期望的预期结果(或目标状态)。AI代理中的每一个可以从达到特定目标状态的预测可能后果中选择后果,并向交通工具110的各种其他子系统提供信号或命令,以执行确定用于引起所选后果的一个或多个动作。AI代理还可以包括可被配置或可操作用于从关于所选后果和某一(某些)性能度量的经验中学习的学习模块。经验可包括在执行所选后果的一个或多个动作之后收集的传感器数据和/或新状态数据。所学到的经验可用于产生新的或经更新的模型,以确定未来要采取的动作。
定位电路1245包括用于接收由全球导航卫星系统(global navigationsatellite system,GNSS)的定位网络传送/广播的信号并对其进行解码的电路。导航卫星星座(或GNSS)的示例包括美国的全球定位系统(Global Positioning System,GPS)、俄罗斯的全球导航系统(GLONASS)、欧盟的伽利略系统、中国的北斗导航卫星系统、区域导航系统或GNSS增强系统(例如,利用印度星座(NAVIC)、日本的准天顶卫星系统(Quasi-ZenithSatellite System,QZSS)、法国的多普勒轨道成像和卫星综合无线电定位(DopplerOrbitography and Radio-positioning Integrated by Satellite,DORIS)等进行的导航)等等。定位电路1245包括用于与定位网络的组件(诸如导航卫星星座节点)通信的各种硬件元件(例如,包括诸如交换机、滤波器、放大器、天线元件等等之类的用于促进OTA通信的硬件设备)。定位电路1245可包括用于定位、导航和定时的微技术(Micro-Technologyfor Positioning,Navigation,and Timing,Micro-PNT)IC,其使用主定时时钟来执行位置跟踪/估计而无需GNSS辅助。定位电路1245也可以是通信电路1266的部分或者与通信电路1266交互以与定位网络的节点和组件通信。定位电路1245还可向应用电路提供位置数据和/或时间数据,该应用电路可使用该数据使操作与各种基础设施(例如,无线电基站)同步以用于逐向导航等等。当GNSS信号不可用或当GNSS定位准确性不足以用于特定应用或服务时,可使用定位增强技术来向应用或服务提供增强的定位信息和数据。此类定位增强技术可以包括例如基于卫星的定位增强(例如,EGNOS)和/或基于地面的定位增强(例如,DGPS)。在一些实现方式中,定位电路1245是或包括INS,该INS是使用传感器电路1272(例如,诸如加速度计之类的运动传感器、诸如陀螺仪之类的旋转传感器、以及高度计、磁传感器和/或类似物)来连续计算(例如,使用航位推算、三角测量等)节点1250的定位、定向和/或速度(包括移动的方向和速度)而无需外部参考的系统或设备。
在一些任选示例中,各种输入/输出(I/O)设备可存在于边缘计算节点1250内或连接至边缘计算节点1250,I/O设备是指图12中的输入电路1286和输出电路1284。输入电路1286和输出电路1284包括被设计成用于实现用户与节点1250的交互的一个或多个用户接口以及被设计成用于实现外围组件与节点1250的交互的外围组件接口。输入电路1286可包括用于接受输入的任何实体或虚拟装置,输入电路1286尤其包括一个或多个实体或虚拟按钮(例如,重置按钮)、物理键盘、小键盘、鼠标、触摸板、触摸屏、话筒、扫描仪、头戴式耳机,等等。可包括输出电路1284,以示出信息或以其他方式传达信息,诸如传感器读数、(一个或多个)致动器位置、或其他类似信息。可将数据和/或图形显示在输出电路1284的一个或多个用户接口组件上。输出电路1284可包括任何数量的音频或视觉显示器和/或音频或视觉显示器的任何组合,尤其包括具有从节点1250的操作生成或产生的字符、图形、多媒体对象等的输出的一个或多个简单的视觉输出/指示器(例如,二进制状态指示器(例如,发光二极管(light emitting diode,LED))和多字符视觉输出或更复杂的输出,诸如显示设备或触摸屏(例如,液晶显示器(Liquid Chrystal Display,LCD)、LED显示器、量子点显示器、投影仪等)。输出电路1284还可包括扬声器或其他发声设备、(一个或多个)打印机等等。传感器电路1272可被用作输入电路1284(例如,图像捕获设备、运动捕获设备等等),并且一个或多个致动器1274可被用作输出设备电路1284(例如,用于提供触觉反馈等的致动器)。在另一示例中,近场通信(near-field communication,NFC)电路可被包括以读取电子标签和/或与另一启用NFC的设备通信,该NFC电路包括与天线元件和处理设备耦合的NFC控制器。外围组件接口可包括但不限于非易失性存储器端口、USB端口、音频插孔、电源接口等。在本系统的情境中,显示器或控制台硬件可用于:提供边缘计算系统的输出并接收边缘计算系统的输入;管理边缘计算系统的组件或服务;标识边缘计算组件或服务的状态;或进行任何其他数量的管理或管理功能或服务用例。
电池1276可为边缘计算节点1250供电,但是在其中边缘计算节点1250被安装在固定位置的示例中,该边缘计算节点1250可具有耦合至电网的电源,或者电池可以用作备用或用于临时功能。电池1276可以是锂离子电池或金属-空气电池(诸如锌-空气电池、铝-空气电池、锂-空气电池),等等。
电池监测器/充电器1278可被包括在边缘计算节点1250中以跟踪电池1276(如果包括的话)的充电状态(state of charge,SoCh)。电池监测器/充电器1278可用于监测电池1276的其他参数以提供失效预测,这些参数诸如电池1276的健康状态(state of health,SoH)和功能状态(state of function,SoF)。电池监测器/充电器1278可包括电池监测集成电路,诸如来自线性技术公司(Linear Technologies)的LTC4020或LTC2990、来自亚利桑那州的凤凰城的安森美半导体公司(ON Semiconductor)的ADT7488A、或来自德克萨斯州达拉斯的德州仪器公司的UCD90xxx族的IC。电池监测器/充电器1278可通过IX1256将关于电池1276的信息传输至处理器1252。电池监测器/充电器1278也可包括使处理器1252能够直接监测电池1276的电压或来自电池1276的电流的模数(analog-to-digital,ADC)转换器。电池参数可被用于确定边缘计算节点1250可执行的动作,该电池参数诸如传输频率、网格网络操作、感测频率,等等。
功率块1280或耦合至电网的其他电源可与电池监测器/充电器1278耦合以对电池1276充电。在一些示例中,功率块1280可用无线功率接收器代替,以例如通过边缘计算节点1250中的环形天线来无线地获得功率。无线电池充电电路(诸如来自加利福尼亚州的苗比达市的线性技术公司的LTC4020芯片,等等)可被包括在电池监测器/充电器1278中。可以基于电池1276的大小并且因此基于所要求的电流来选择特定的充电电路。可使用由无线充电联盟(Airfuel Alliance)颁布的Airfuel标准、由无线电力协会(Wireless PowerConsortium)颁布的Qi无线充电标准、或由无线电力联盟(Alliance for Wireless Power)颁布的Rezence充电标准等等来执行充电。
存储装置1258可包括用于实现本文中所描述的技术的采用软件、固件或硬件命令形式的指令1283。虽然此类指令1283被示出为被包括在存储器1254和存储装置1258中的代码块,但是可以理解,可用例如被内置到专用集成电路(application specificintegrated circuit,ASIC)中的硬连线电路来代替代码块中的任一个。
在示例中,经由存储器1254、存储装置1258或处理器1252提供的指令1281、1282、1283可被具体化为非暂态机器可读介质1260,该非暂态机器可读介质1260包括用于指导处理器1252执行边缘计算节点1250中的电子操作的代码。处理器1252可通过IX 1256来访问非暂态机器可读介质1260。例如,非暂态机器可读介质1260可由针对存储装置1258所描述的设备来具体化,或者可包括特定的存储单元,诸如光盘、闪存驱动器或任何数量的其他硬件设备。非暂态机器可读介质1260可包括用于指导处理器1252执行例如像参照上文中描绘的操作和功能的(一个或多个)流程图和(一个或多个)框图而描述的特定的动作序列或动作流的指令。如本文中所使用,术语“机器可读介质”和“计算机可读介质”是可互换的。
在进一步的示例中,机器可读介质也包括任何有形介质,该有形介质能够存储、编码或携载供机器执行并且使机器执行本公开方法中的任何一种或多种方法的指令,或者该有形介质能够储存、编码或携载由此类指令利用或与此类指令相关联的数据结构。“机器可读介质”因此可包括但不限于固态存储器、光学介质和磁介质。机器可读介质的特定示例包括非易失性存储器,作为示例,包括但不限于:半导体存储器设备(例如,电可编程只读存储器(electrically programmable read-only memory,EPROM)、电可擦除可编程只读存储器(electrically erasable programmable read-only memory,EEPROM)和闪存设备);诸如内部硬盘及可移除盘之类的磁盘;磁光盘;以及CD-ROM和DVD-ROM盘。可使用传输介质,经由网络接口设备,利用数种传输协议中的任何一种协议(例如,HTTP),进一步通过通信网络来传送或接收由机器可读介质具体化的指令。
机器可读介质可以由能够以非暂态格式主控数据的存储设备或其他装置提供。在示例中,存储在机器可读介质上或以其他方式提供在机器可读介质上的信息可以表示指令,诸如指令本身或者可以从中导出指令的格式。此种可以从中导出指令的格式可以包括源代码、经编码的指令(例如,以压缩或加密的形式)、经封装的指令(例如,拆分成多个封装)等。表示机器可读介质中的指令的信息可以由处理电路处理成指令以实现本文所讨论的任何操作。例如,从信息中导出指令(例如,由处理电路进行的处理)可以包括:(例如,从源代码、目标代码等)编译、解释、加载、组织(例如,动态地或静态地进行链接)、编码、解码、加密、解密、打包、拆包,或者以其他方式将信息操纵为指令。
在示例中,指令的推导可以包括(例如,由处理电路)对信息进行汇编、编译、或解释,以从机器可读介质提供的某个中间或经预处理的格式创建指令。当信息以多个部分被提供时,该信息可以被组合、拆包和修改以创建指令。例如,信息可以处于一个或若干个远程服务器上的多个经压缩的源代码封装(或目标代码、或二进制可执行代码等)中。源代码封装可以在通过网络传输时被加密,并且可以在本地机器处被解密、被解压缩、(如果必要的话)被汇编(例如,被链接),并且被编译或被解释(例如,被编译或被解释成库、独立的可执行文件等),并且由本地机器执行。
图9-图12的图示旨在描绘边缘计算节点的各种设备、子系统、或布置的组件的高级视图。然而,可省略所示出的组件中的一些组件,可存在附加的组件,并且在其他实现方式中可存在组件的不同布置。此外,这些布置可用于各种用例和环境中,这些用例和环境包括本文中所讨论的那些用例和环境(例如,用于智慧城市或智慧工厂的工业计算中的移动UE,以及许多其他示例)。图12的计算平台可通过使用在单个计算平台上运行的租户容器来支持多个边缘实例(例如,边缘集群)。同样,多个边缘节点可作为在同一计算平台内的租户上运行的子节点而存在。相应地,基于可用的资源分区,可将单个系统或计算平台分区或划分为支持多个租户和边缘节点实例,该多个租户和边缘节点实例中的每一者可支持多个服务和功能——即使在潜在地在多个计算平台实例中由多个所有者操作或控制时也是如此。这些各种类型的分区可通过使用LSM或使用隔离/安全策略的其他实现方式来支持复杂的多租户、以及多利益相关方的许多组合。由此在以下章节中记述对使用LSM、以及增强或实现此类安全特征的安全特征的引用。同样,在这些各种类型的多实体分区上操作的服务和功能可以是负载平衡的、经迁移的、以及经编排的,以实现必要的服务目标和操作。
前述图中的一个或多个图中所阐述的系统或组件中的至少一个可以是可被配置或可操作用于执行以下示例章节中所阐述的一个或多个操作、技术、过程和/或方法。
7.实现方式示例
示例1包括一种操作始发智能运输系统站(ITS-S)的易受伤害道路使用者(VRU)基本服务(VBS)设施的方法,该方法包括:检测VRU认知消息(VAM)生成事件;响应于检测到VAM生成事件而生成VAM;以及发送所生成的VAM。
示例2包括示例1的方法,其中在连续的VAM生成事件的开始之间经过的最小时间等于或大于用于生成VAM的时间(T_GenVam)参数,其中T_GenVam处于用于生成VAM的最小时间(T_GenVamMin)参数与用于生成VAM的最大时间(T_GenVamMax)参数之间。
示例3包括示例1的方法,其中,VBS包括VBS管理实体,并且该方法进一步包括:操作VBS管理实体以确定以毫秒为单位的T_GenVam参数的值。
示例4包括示例3的方法,进一步包括:当VBS管理实体为T_GenVam参数提供的值大于T_GenVamMax参数的值时,将T_GenVam参数设置为T_GenVamMax参数的值;当VBS管理实体为T_GenVam参数提供的值小于T_GenVamMin参数的值时,将T_GenVam参数设置为T_GenVamMin参数的值;以及当VBS管理实体没有为T_GenVam参数提供值时,将T_GenVam参数设置为T_GenVamMin参数的值。
示例5包括示例1-4中任一项的方法,其中,VAM生成事件包括激活VBS。
示例6包括示例1-5中任一项的方法,其中,VAM生成事件包括:从VRU-空闲VBS状态进入VRU-活跃-独立状态;响应于确定离开VRU集群,从VRU-被动VBS状态进入VRU-活跃-独立VBS状态;响应于确定VRU集群的VRU集群领导者丢失,从VRU-被动VBS状态进入VRU-活跃-独立VBS状态;或响应于确定分解VRU集群并传送具有解散指示的VRU集群VAM,从VRU-活跃-集群-领导者VBS状态进入VRU-活跃-独立VBS状态。
示例7包括示例1-6中任一项的方法,进一步包括:生成连续的VAM作为检测到的VAM生成事件的一部分;以及引起所生成的VAM的传送。
示例8包括示例7的方法,其中生成连续的VAM包括:当多个条件中的至少一个条件被满足时,生成连续的VAM,其中,该多个条件包括:当自上一次VAM被传送以来所经过的时间超过T_GenVamMax时;当始发ITS-S的参考点的当前估计位置与先前包括在VAM中的参考点的估计位置之间的欧几里得绝对距离超过第一预定义阈值时;当始发ITS-S的参考点的当前估计地面速度与先前包括在VAM中的始发ITS-S的参考点的估计绝对速度之间的差超过第二预定义阈值时;当VRU的参考点的当前估计地面速度向量的定向与先前包括在VAM中的始发ITS-S的参考点的地面速度向量的估计定向之间的差超过第三预定义阈值时;当同一个或多个交通工具或一个或多个其他VRU的当前估计轨迹拦截概率与同VAM中先前报告的交通工具或VRU的轨迹拦截概率之间的差超过第四预定义阈值时;当始发ITS-S是处于VRU-活跃-独立VBS状态的VRU并且已经决定在先前的VAM传送之后加入VRU集群时;以及当始发ITS-S是VRU并且已经确定一个或多个交通工具或一个或多个其他VRU在先前的VAM传送之后已经进行了以下操作时:移动到横向地比最小安全横向距离(MSLaD)更接近、移动到纵向地比最小安全纵向距离(MSLoD)更接近或移动到垂直地比最小安全垂直距离(MSVD)更接近。
示例9包括示例7的方法,其中连续的VAM是集群VAM并且生成连续的VAM包括:当多个条件中的至少一个条件被满足时,生成连续的VAM,其中,该多个条件包括:当自上一次VRU集群VAM被传送以来所经过的时间超过T_GenVamMax时;当VRU集群的参考点的当前估计位置与先前包括在VRU集群VAM中的参考点的估计位置之间的欧几里得绝对距离超过第一预定义阈值时;当距集群边界的当前估计距离与基于先前传送的VAM的估计距离之间的差超过第二预定义阈值时;当VRU集群的参考点的当前估计地面速度与先前包括在VRU集群VAM中的参考点的估计绝对速度之间的差超过第三预定义阈值时;当VRU集群的参考点的当前估计地面速度向量的定向与先前包括在VRU集群VAM中的参考点的地面速度向量的估计定向之间的差超过第四预定义阈值时;当VRU集群领导者确定同一个或多个交通工具或一个或多个VRU的当前估计轨迹拦截概率与同集群VAM中先前报告的一个或多个交通工具或一个或多个VRU的轨迹拦截概率之间的差超过第六预定义阈值时;当VRU集群类型在先前的VAM生成事件之后已经被改变时;当VRU集群领导者已经确定在先前的VRU集群VAM的传送之后分解VRU集群时;当数个VRU已经在先前的VRU集群VAM的传送之后加入VRU集群时;当数个VRU已经在先前的VRU集群VAM的传送之后离开VRU集群时;以及当VRU集群领导者已经确定不属于VRU集群的一个或多个交通工具或VRU在先前的VRU集群VAM之后已经进行了以下操作时:移动到横向地比最小安全横向距离(MSLaD)更接近、移动到纵向地比最小安全纵向距离(MSLoD)更接近、以及移动到垂直地比最小安全垂直距离(MSVD)更接近于VRU集群边界框。
示例10包括示例7-9中任一项的方法,进一步包括:当VAM缓解技术集合被满足时,跳过连续VAM的生成或传送。
示例11包括示例10的方法,其中,VAM缓解技术集合包括:当自上一次由始发ITS-S传送VAM以来所经过的时间不超过预定数量倍的T_GenVamMax时;始发ITS-S的参考点的当前估计位置与从对等ITS-S接收到的VAM中的参考点的估计位置之间的欧几里得绝对距离小于第一阈值;始发ITS-S的参考点的当前估计速度与从对等ITS-S接收到的VAM中的参考点的估计绝对速度之间的差小于第二阈值;以及当前估计地面速度向量的定向与从对等ITS-S接收到的VAM中的参考点的地面速度向量的估计定向之间的差小于第三阈值。
示例12包括示例1-11中任一项的方法,其中,生成VAM进一步包括:在预定义的VAM组装时间内生成VAM,其中,预定义的VAM组装时间是VAM生成事件被触发所在的时间与所生成的VAM被递送给始发ITS-S的联网和传输层以用于传送所在的时间之间的时间差。
示例13包括示例12的方法,其中,预定义VAM组装时间与包括在所生成的VAM中的参考时间戳之间的差小于32,767毫秒。
示例14。示例1-13中任一项的方法,其中,始发ITS-S是非VRU ITS-S,并且检测VAM生成事件的发生包括:检测非VRU ITS-S在至少VAM传送持续时间内未从其接收到任何VAM的至少一个VRU;响应于检测到至少一个VRU而生成VAM;以及引起所生成的VAM的传送。
示例15包括示例14的方法,其中,检测至少一个VRU包括:感知至少一个VRU的位置。
示例16包括示例15的方法,其中,生成VAM进一步包括:当检测到的至少一个VRU的感知到的位置处于先前的VAM传送持续时间期间的任何接收到的VRU集群VAM中指定的VRU集群的边界框之外时生成VAM。
示例17包括示例15或16的方法,其中,生成VAM进一步包括:当在先前的VAM传送持续时间期间接收到的任何VAM指示未检测到VRU时生成VAM。
示例18包括示例15-17中任一项的方法,其中,生成VAM进一步包括:当检测到的至少一个VRU处于在所生成的VAM中指示的VRU集群的边界框之外时生成VAM。
示例19包括示例18的方法,其中,生成VAM进一步包括:当检测到的至少一个VRU在先前的VAM生成事件之后已经被检测到时生成VAM。
示例20包括示例18或19的方法,其中,生成VAM进一步包括:当自上一次在VAM中指示检测到的至少一个VRU以来所经过的时间超过阈值时间量时生成VAM。
示例21包括示例18-20中任一项的方法,其中,生成VAM进一步包括:当检测到的至少一个VRU的参考点的当前估计位置与先前在VAM中指示的检测到的至少一个VRU的参考点的估计位置之间的欧几里得绝对距离超过预定阈值时生成VAM。
示例22包括示例21的方法,其中,生成VAM进一步包括:当检测到的至少一个VRU的参考点的当前估计地面速度与先前在VAM中指示的检测到的至少一个VRU的参考点的估计绝对速度之间的差超过预定阈值时生成VAM。
示例23包括示例21或22的方法,其中,生成VAM进一步包括:当检测到的至少一个VRU的参考点的当前估计地面速度向量的定向与先前由VAM指示的检测到的至少一个VRU的参考点的地面速度向量的估计定向之间的差超过预定阈值时生成VAM。
示例24包括示例21-23中任一项的方法,其中,生成VAM进一步包括:确定检测到的至少一个VRU同对象的当前估计轨迹拦截指示(TII)与在先前的VAM中报告的检测到的至少一个VRU同对象的TII之间的差;以及当所确定的差大于预定阈值时生成VAM。
示例25包括示例18-24中任一项的方法,其中,生成VAM进一步包括:当在先前传送的VAM之后一个或多个交通工具ITS-S或一个或多个其他VRU正在进行以下操作时生成VAM:移动到横向地比最小安全横向距离(MSLaD)更接近于检测到的至少一个VRU、移动到纵向地比最小安全纵向距离(MSLoD)更接近于检测到的至少一个VRU,以及相对于检测到的至少一个VRU移动到垂直地比最小安全垂直距离(MSVD)更接近于检测到的至少一个VRU。
示例26包括示例14-25中任一项的方法,其中生成VAM包括:确定用于报告VAM的VRU的集合或VRU集群的集合;生成包括VAM扩展容器的VAM,该VAM扩展容器包括第一容器和第二容器,该第一容器指示VRU的集合中的总的单独的VRU,并且该第二容器指示所报告的总的VRU集群;以及引起所生成的VAM的传送。
示例27包括示例26的方法,其中,VAM扩展容器进一步包括,针对VRU的集合或VRU集群的集合中的每个VRU或VRU集群的相应VRU低频容器、相应VRU高频容器、相应集群信息容器、相应集群操作容器和相应运动预测容器。
示例28包括一种交通工具智能运输系统站(V-ITS-S),包括:通信电路;以及与通信电路通信地耦合的处理器电路,该处理器电路被布置成用于执行示例1-27中任一项的方法。
示例29包括一种路边智能运输系统站(R-ITS-S),包括:接口电路,该接口电路被布置成用于将R-ITS-S与一个或多个远程无线电单元通信地耦合;以及与接口电路通信地耦合的处理器电路,该处理器电路被布置成用于执行示例1-27中任一项的方法。
示例30包括一种易受伤害道路使用者(VRU)智能运输系统站(ITS-S),包括:通信电路;以及与通信电路通信地耦合的处理器电路,该处理器电路被布置成用于执行示例1-27中任一项的方法。
示例31包括一种或多种计算机可读介质,包括指令,其中,由处理器电路对这些指令的执行使得该处理器电路用于执行示例1-27中任一项的方法。
示例32包括一种计算机程序,包括示例31的指令。
示例33包括一种应用编程接口,该应用编程接口定义用于示例30的计算机程序的函数、方法、变量、数据结构和/或协议。
示例34包括一种装置,该装置包括加载有示例31的指令的电路。
示例35包括一种装置,该装置包括可操作用于运行示例31的指令的电路。
示例36包括一种集成电路,该集成电路包括以下中的一项或多项:示例31的处理器电路;以及示例30的一种或多种计算机可读介质。
示例37包括一种计算系统,该计算系统包括示例31的一种或多种计算机可读介质以及处理器电路。
示例38包括一种设备,该设备包括用于执行示例31的指令的装置。
示例39包括一种信号,该信号作为执行示例31的指令的结果而被生成。
示例40包括一种数据单元,该数据单元作为执行示例31的指令的结果而被生成。
示例41包括如示例34的数据单元,其中,该数据单元是数据报、网络分组、数据帧、数据段、PDU、服务数据单元、“SDU”、消息或数据库对象。
示例42包括编码有示例40或示例41的数据单元的信号。
示例43包括携载示例31的指令的电磁信号。
示例44包括一种设备,包括用于执行示例1-27中任一项的方法的装置。
示例实现方式包括多接入边缘计算(MEC)主机,该主机执行作为在虚拟化基础设施上实例化的一个或多个MEC应用的一部分的服务,该服务与示例1-44或其部分和/或本文中的一些其他示例中的任一项相关,并且其中MEC主机可被配置或可操作用于根据来自一个或多个ETSI MEC标准族的标准进行操作。
示例实现方式是一种边缘计算系统,该边缘计算系统包括用于调用或执行示例A01-A31、B01-B17和C01-C08的操作的相应边缘处理设备和节点、或者本文中所描述的其他主题。另一示例实现方式是一种客户端端点节点,该客户端端点节点可操作以用于调用或执行示例A01-A31、B01-B17和C01-C08的操作或者本文中所描述的其他主题。另一示例实现方式是一种处于边缘计算系统内或耦合至边缘计算系统的聚合节点、网络中枢节点、网关节点、或核心数据处理节点,该聚合节点、网络中枢节点、网关节点、或核心数据处理节点可操作以用于调用或执行示例1-44的操作或者本文中所描述的其他主题。另一示例实现方式是一种处于边缘计算系统内或耦合至边缘计算系统的接入点、基站、路边单元、或自有(on-premise)单元,该接入点、基站、路边单元、或自有单元可操作以用于调用或执行示例1-44的操作或者本文中所描述的其他主题。另一示例实现方式是一种处于边缘计算系统内或耦合至边缘计算系统的边缘供应节点、服务编排节点、应用编排节点、或多租户管理节点,该边缘供应节点、服务编排节点、应用编排节点、或多租户管理节点可操作以用于调用或执行示例1-44或者本文中所描述的其他主题的操作。
另一示例实现方式是一种处于边缘计算系统内或耦合至边缘计算系统的边缘节点,该边缘节点操作边缘供应服务、应用或服务编排服务、虚拟机部署、容器部署、功能部署、以及计算管理,该边缘节点可操作以用于调用或执行示例1-44的操作或者本文中所描述的其他主题。另一示例实现方式是一种边缘计算系统,该边缘计算系统可作为边缘网格、作为具有边车加载或具有网格对网格通信的边缘网格来操作,该边缘计算系统可操作以用于唤起或执行示例1-44的操作或者本文中所描述的其他主题。另一示例实现方式是一种边缘计算系统,该边缘计算系统包括网络功能、加速功能、加速硬件、存储硬件、或计算硬件资源,该边缘计算系统可操作以用于使用示例1-44或本文中所描述的其他主题来调用或执行本文中所讨论的用例。另一示例实现方式是一种边缘计算系统,该边缘计算系统适于支持客户端移动性、交通工具对交通工具(V2V)、交通工具对外界(V2X)、或交通工具对基础设施(V2I)场景,并且任选地根据ETSI MEC规范来进行操作,该边缘计算系统可操作以使用示例1-44或本文中所描述的其他主题来调用或执行本文中所讨论的用例。另一示例实现方式是一种边缘计算系统,该边缘计算系统适于移动无线通信,包括根据3GPP4G/LTE或5G网络能力的配置,该边缘计算系统可操作以使用示例A01-A31、B01-B17和C01-C08或本文中所描述的其他主题来调用或执行本文中所讨论的用例。另一示例实现方式是一种边缘计算系统,该边缘计算系统适于支持xApp移动无线通信并根据O-RAN规范操作,该边缘计算系统可操作以使用示例1-44或本文中所描述的其他主题来调用或执行本文中所讨论的用例。另一示例实现方式是一种边缘计算系统,该边缘计算系统适于根据开放式视觉推断和神经网络优化(Open Visual Inference and Neural network Optimization,OpenVINO)规范进行操作,该边缘计算系统可操作以使用示例1-44或本文中所描述的其他主题来调用或执行本文中所讨论的用例。另一示例实现方式是一种边缘计算系统,该边缘计算系统适于根据OpenNESS规范操作,该边缘计算系统可操作以使用示例1-44或本文中所描述的其他主题来调用或执行本文中所讨论的用例。另一示例实现方式是一种边缘计算系统,该边缘计算系统适于根据智能边缘计算框架操作,该边缘计算系统可操作以使用示例1-44或本文中所描述的其他主题来调用或执行本文中所讨论的用例。
除非以其他方式明确陈述,否则上述一个和/或多个示例中的任一示例可与任何其他示例(或示例的组合)组合。
8.术语
本文使用的术语不旨在限制本公开。已经参照方法、装置(系统)和计算机程序产品的流程图图示和/或框图描述了本公开。在附图中,一些结构或方法特征可按特定布置和/或排序示出。然而,应当领会,此类特定布置和/或排序可以不是必需的。相反,可以以与在说明性附图中示出的不同的方式和/或次序来布置此类特征。附加地,在特定附图中包括结构或方法特征不意味着暗示此类特征是必需的,并且可以不包括此类特征,或此类特征可以与其他特征组合。
如本文中所使用,单数形式的“一”(“a”、“an”)和“该”(“the”)旨在也包括复数形式,除非上下文另外清楚地指示。还将理解,当在本说明书中使用术语“包括”(“comprise”和/或“comprising”)时,其指定所陈述的特征、整数、步骤、操作、元件、和/或组件的存在,但不排除一个或多个其他特征、整数、步骤、操作、元件、组件、和/或其群组的存在或添加。短语“A和/或B”意指(A)、(B)或(A和B)。出于本公开的目的,短语“A、B和/或C”意指(A)、(B)、(C)、(A和B)、(A和C)、(B和C)或(A、B和C)。此外,如相对于本公开所使用的术语“包含”、“包括”、“具有”等是同义的。
本文中使用术语“耦合的”、“通信地耦合的”及其派生词。术语“耦合的”可意指两个或更多个元件彼此处于直接的物理或电接触,可意指两个或更多个元件间接地彼此接触但仍彼此协作或交互,和/或可意指一个或多个其他元件被耦合或连接在被称为彼此耦合的元件之间。术语“直接耦合的”可意指两个或更多个元件彼此直接接触。术语“通信地耦合的”可意指两个或更多个元件可通过通信手段彼此联系,通过通信手段包括通过线或其他互连连接、通过无线通信信道或墨迹,等等。
术语“电路”是指被配置成用于执行电子设备中的特定功能的电路或具有多个电路的系统。电路或电路的系统可以是被配置成用于提供所描述的功能的一个或多个硬件组件的部分或包括该一个或多个硬件组件,该一个或多个硬件组件诸如逻辑电路、处理器(共享的、专用的或成组的)和/或存储器(共享的、专用的或成组的)、ASIC、FPGA、可编程逻辑控制器(programmable logic controller,PLC)、SoC、SiP、多芯片封装(multi-chippackage,MCP)、DSP等。另外,术语“电路”也可指代一个或多个硬件元件与程序代码的组合,用于执行该程序代码的功能。一些类型的电路可执行一个或多个软件或固件程序,以提供所描述的功能中的至少一些。此类硬件元件与程序代码的组合可被称为特定类型的电路。
应当理解,在本说明书中所描述的功能单元或能力可能已被称为或标记为组件或模块,从而更特别地强调其实现方式的独立性。此类组件可由任何数量的软件或硬件形式来具体化。例如,组件或模块可以被实现成硬件电路,该硬件电路包括定制的超大规模集成(very-large-scale integration,VLSI)电路或门阵列,诸如逻辑芯片、晶体管之类的现成的半导体,或其他分立的组件。组件或模块也可被实现在可编程硬件器件中,诸如现场可编程门阵列、可编程阵列逻辑、可编程逻辑器件等。组件或模块也可被实现在用于由各种类型的处理器执行的软件中。可执行代码的所标识的组件或模块可以例如包括计算机指令的一个或多个物理或逻辑块,其可被组织成例如对象、过程、或函数。然而,所标识的组件或模块的可执行对象不需要在物理上定位在一起,而是可包括存储在不同位置中的不同指令,当这些指令在逻辑上结合在一起时,包括组件或模块,并且为该组件或模块实现所声称的目的。
实际上,可执行代码的组件或模块可以是单个指令或许多指令,并且甚至可以分布在若干不同的代码段上,分布在不同的程序之间以及跨若干存储器设备或处理系统分布。具体而言,所描述的过程的一些方面(诸如代码重写和代码分析)可能在与在其中部署代码的处理系统(例如,在嵌入在传感器或机器人的计算机中)不同的处理系统(例如,在数据中心中的计算机中)上进行。类似地,操作数据在本文中可被标识并图示在组件或模块内,并且能以任何合适的形式被具体化并且可以被组织在任何合适类型的数据结构内。操作数据可作为单个数据集被收集,或者可被分布在不同的位置上(包括在不同存储设备上),并且可以至少部分地仅作为系统或网络上的电子信号存在。组件或模块可以是无源或有源的,包括可操作以执行期望功能的代理。
如本文中所使用,术语“处理器电路”是指能够顺序地且自动地执行算术或逻辑操作序列,或者记录、存储和/或传递数字数据的电路,是该电路的部分,或者包括该电路。术语“处理器电路”可指一个或多个应用处理器、一个或多个基带处理器、物理CPU、单核心处理器、双核心处理器、三核心处理器、四核心处理器、和/或能够执行或以其他方式操作计算机可执行指令的任何其他设备,这些计算机可执行指令诸如程序代码、软件模块和/或函数进程。术语“应用电路”和/或“基带电路”可视为与“处理器电路”是同义的,或可被称为“处理器电路”。
本文中所使用的术语“存储器”和/或“存储器电路”是指用于存储数据的一个或多个硬件设备,包括RAM、MRAM、PRAM、DRAM、和/或SDRAM、核心存储器、ROM、磁盘存储介质、光学存储介质、闪存设备或用于存储数据的其他机器可读介质。术语“计算机可读介质”可包括但不限于存储器、便携式或固定存储设备、光学存储设备以及能够存储、包含或承载指令或数据的各种其他介质。
如本文中所使用,术语“接口电路”是指实现两个或更多个组件或设备之间的信息交换的电路,是该电路的部分,或者包括该电路。术语“接口电路”可指一个或多个硬件接口,例如,总线、I/O接口、外围组件接口、网络接口卡,等等。
术语“元件”是指在给定的抽象水平不可分并且具有清楚地限定的边界的单元,其中,元件可以是任何类型的实体,包括例如一个或多个设备、系统、控制器、网络元件、模块等或其组合。术语“设备”是指这样的物理实体:该物理实体被嵌入在其附近的另一物理实体内部或附连至其附近的另一物理实体,具有传达来自该物理实体的数字信息或向该物理实体传达数字信息的能力。术语“实体”是指体系结构或设备的不同组件、或作为有效载荷被传递的信息。术语“控制器”是指具有诸如通过改变其状态或使物理实体移动来影响物理实体的能力的元件或实体。
如本文中所使用,术语“边缘计算”涵盖致力于针对端点用户(客户端设备、用户装备等)减少等待时间并增加吞吐量而将处理活动和资源(例如,计算、存储、加速资源)朝向网络的“边缘”移动的分布式计算的许多实现方式。此类边缘计算实现方式典型地涉及从经由无线网络可访问的一个或多个位置在类云服务、功能、应用和子系统中提供此类活动和资源。由此,对本文中所使用的网络、集群、域、系统或计算布置的“边缘”的引用是起作用的分布式计算元件的群组或分组,并且由此一般与图论中使用的“边缘”(链接或连接)无关。经由移动无线网络(例如,蜂窝和WiFi数据网络)可访问的边缘计算应用和服务的特定布置可被称为“移动边缘计算”或“多接入边缘计算”,其可通过缩写“MEC”来引用。本文中对“MEC”的使用也可指代由欧洲电信标准协会(European Telecommunications StandardsInstitute,ETSI)颁布的标准化实现方式,被称为“ETSI MEC”。ETSI MEC规范所使用的术语通过引用总体结合于此,除非本文中提供冲突的定义或使用。
如本文中所使用,术语“计算节点”或“计算设备”是指实现边缘计算操作的一方面的可标识的实体(不论是较大系统的部分、分布式系统集合、还是独立装置)。在一些示例中,计算节点可被称为“边缘节点”、“边缘设备”、“边缘系统”,而不论作为客户端、服务器还是中间实体来进行操作。计算节点的特定实现方式可被并入到服务器、基站、网关、路边单元、自有单元、UE或终端消费设备等等中。
如本文中所使用的术语“计算机系统”是指任何类型经互连的电子设备、计算机设备、或其组件。附加地,术语“计算机系统”和/或“系统”可指计算机的、彼此通信地耦合的各种组件。此外,术语“计算机系统”和/或“系统”可指彼此通信地耦合并且被配置成用于共享计算和/或联网资源的多个计算机设备和/或多个计算系统。
如本文中所使用的术语“体系结构”是指计算机体系结构或网络体系结构。“网络体系结构”是在包括通信协议、接口和介质传输的网络中软件和/或硬件元件的物理和逻辑设计或布置。“计算机体系结构”是在包括软件和/或硬件元件之间的交互的技术标准的计算系统或平台中软件和/或硬件元件的物理和逻辑设计或布置。
如本文中所使用,术语“装置”、“计算机装置”等等是指具有程序代码(例如,软件或固件)的、专门被设计成用于提供特定计算资源的计算机设备或计算机系统。“虚拟装置”是用于由使计算机装置虚拟化或对计算机装置进行仿真或者以其他方式专用于提供特定的计算资源的、装配有管理程序的设备实现的虚拟机镜像。
如本文中所使用的术语“用户装备”或“UE”是指具有无线电通信能力的设备,并且可描述通信网络中网络资源的远程用户。术语“用户装备”或“UE”可被认为与以下各项同义并且可被称为以下各项:客户端、移动式装置、移动设备、移动终端、用户终端、移动单元、站、移动站、移动用户、订户、用户、远程站、接入代理、用户代理、接收机、无线电装备、可重配置无线电装备、可重配置移动设备等。此外,术语“用户装备”或“UE”可包括任何类型的无线/有线设备、或包含无线通信接口的任何计算设备。术语“站”或“STA”是指作为至无线介质(wireless medium,WM)的介质访问控制(MAC)和物理层(PHY)接口的可单独寻址的实例的逻辑实体。术语“无线介质”或“WM”是指用于实现协议数据单元(PDU)在无线局域网(LAN)的对等物理层(PHY)实体之间的传输的介质。
如本文中所使用的术语“网络元件”是指用于提供有线或无线通信网络服务的物理或虚拟化的装备和/或基础设施。术语“网络元件”可被认为与以下各项同义和/或被称为以下各项:联网的计算机、联网硬件、网络装备、网络节点、路由器、交换机、中枢、网桥、无线电网络控制器、RAN设备、RAN节点、网关、服务器、虚拟化VNF、NFVI等等。
如本文所使用的,术语“接入点”或“AP”是指包含一个站(STA)并且经由针对相关联的站的无线介质(WM)提供对分发服务的访问的实体。AP包括站和分发系统访问功能(distribution system access function,DSAF)。如本文中所使用,术语“基站”是指无线电接入网络(RAN)中的网络元件,该无线电接入网络诸如负责在一个或多个蜂窝小区中将无线电信号发送至用户装备(UE)或从用户装备(UE)接收无线电信号的第四代(fourth-generation,4G)或第五代(fifth-generation,5G)移动通信网络。基站可以具有集成式天线,或者可通过馈电电缆连接至天线阵列。基站使用专门的数字信号处理和网络功能硬件。在一些示例中,出于灵活性、成本、以及性能,可将基站拆分成采用软件进行操作的多个功能块。在一些示例中,基站可包括演进节点B(eNB)或下一代节点B(gNB)。在一些示例中,基站可操作或包括计算硬件,以作为计算节点来进行操作。然而,在本文中所讨论的场景中的许多场景中,RAN基站可以用接入点(例如,无线网络接入点)或其他网络接入硬件来代替。
如本文中所使用,术语“中央局”(或CO)指示可访问或所限定的地理区域内的、用于电信基础设施的聚合点,通常电信服务提供商传统上将用于一种或多种类型的接入网络的切换装备定位在其中。CO可以在物理上被设计成用于容纳电信基础设施装备或计算、数据存储和网络资源。然而,CO不需要是由电信服务提供商指定的位置。CO可主控用于边缘应用和服务或者甚至类云服务的本地实现方式的任何数量的计算设备。
术语“云计算”或“云”是指用于在具有按需要自服务供应和管理并且不具有用户的主动管理的情况下启用对可扩展且弹性的可共享资源池的网络访问的范式。云计算提供云计算服务(或云服务),该云计算服务(或云服务)是经由使用所定义的接口(例如,API,等等)调用的云计算而提供的一项或多项能力。术语“计算资源”或简称为“资源”是指在计算机系统或网络内具有有限的可用性的任何物理或虚拟组件或对此类组件的使用。计算资源的示例包括在一段时间内对以下各项的使用/访问:服务器、(一个或多个)处理器、存储装备、存储器设备、存储器区域、网络、电功率、输入/输出(外围)设备、机械设备、网络连接(例如,信道/链路、端口、网络插槽等)、操作系统、虚拟机(VM)、软件/应用、计算机文件等等。“硬件资源”可以指由(一个或多个)物理硬件元件提供的计算、存储和/或网络资源。“虚拟化资源”可指由虚拟化基础设施向应用、设备、系统等提供的计算、存储、和/或网络资源。术语“网络资源”或“通信资源”可指可由计算机设备/系统经由通信网络访问的资源。术语“系统资源”可指用于提供服务的任何种类的共享实体,并且可包括计算和/或网络资源。系统资源可被认为是通过服务器可访问的一组连贯的功能、网络数据对象或服务,其中此类系统资源驻留在单个主机或多个主机上并且是可清楚标识的。
术语“工作负荷”指在时间段期间或在特定时刻由计算系统、设备、实体等执行的工作量。工作负荷可被表示为基准,诸如响应时间、吞吐量(例如,在一段时间内完成多少工作),等等。附加地或替代地,工作负荷可被表示为以下各项:存储器工作负荷(例如,程序执行所需要的用于存储临时或永久数据的以及执行中间计算所需的存储器空间的量)、处理器工作负荷(例如,在给定时间段期间或在特定时刻由处理器执行的指令数量)、I/O工作负荷(例如,在给定时间段期间或在特定时刻输入和输出或系统访问的数量)、数据库工作负荷(例如,在时间段期间数据库查询的数量)、网络相关的工作负荷(例如,网络附连的数量、移动性更新的数量、无线电链路失败的数量、移交的数量、要通过空中接口传递的数据量等),等等。可使用各种算法来确定工作负荷和/或工作负荷特性,其可基于前述工作负荷类型中的任一者。
如本文中所使用,术语“云服务提供商”(或CSP)指示典型地对大规模的“云”资源进行操作的组织,这些大规模的“云”资源由集中式、区域的、和边缘数据中心组成(例如,如在公共云的情境中所使用)。在其他示例中,CSP也可被称为云服务运营商(Cloud ServiceOperator,CSO)。对“云计算”的引用一般是指在相对于边缘计算具有至少一些增加的等待时间、距离、或约束的远程位置处由CSP或CSO提供的计算资源和服务。
如本文中所使用,术语“数据中心”是指旨在容纳多个高性能计算和数据存储节点以使得大量的计算、数据存储和网络资源存在于单个位置处的有目的设计的结构。这通常使得需要专门的机架和封装系统、合适的加热、冷却、通风、安全、灭火、以及功率递送系统。在一些情境中,该术语还可指代计算和数据存储节点。在集中式数据中心或云数据中心(例如,最大的数据中心)、区域数据中心、以及边缘数据中心(例如,最小的数据中心)之间,数据中心的规模可能有所不同。
如本文中所使用,术语“接入边缘层”指示基础设施边缘的、最靠近于终端用户或设备的子层。例如,此类层可通过被部署在蜂窝网络位置处的边缘数据中心来满足。接入边缘层作为基础设施边缘的前线来起作用,并且可连接至层次体系中较高的聚合边缘层。
如本文中所使用,术语“聚合边缘层”指示距接入边缘层一跳的基础设施边缘的层。该层可以要么作为中等规模的数据中心存在于单个位置中,要么可由多个互连的微型数据中心形成以形成具有接入边缘的分层拓扑,从而允许相比于仅有接入边缘更大的协作、工作负荷故障转移、以及可缩放性。
如本文中所使用,术语“网络功能虚拟化”或“NFV”指示使用工业标准虚拟化和云计算技术将NF从专有硬件设备内的嵌入式服务迁移到在标准化CPU上运行的基于软件的虚拟化NF(或VNF)。在一些方面,NFV处理和数据存储将在基础设施边缘内的、直接连接至本地蜂窝站点的边缘数据中心处发生。如本文中所使用,术语“虚拟化网络功能”或“VNF”指示在多功能多目的计算资源(例如,x86、ARM处理体系结构)上操作的基于软件的NF,其可代替于专用物理装备而被NFV使用。在一些方面,若干VNF将在基础设施边缘处的边缘数据中心上操作。
如本文中所使用,术语“边缘计算”是指对处于较靠近于网络的网络的“边缘”或“边缘”的集合的位置处的计算和资源的实现、协调和使用。在网络的边缘处部署计算资源可减少应用和网络等待时间,减少网络回程通信量和相关联的能耗,改善服务能力,改善对安全或数据隐私性要求的顺应性(尤其是与常规云计算相比),并且改善总拥有成本。如本文中所使用,术语“边缘计算节点”是指以设备、网关、桥接器、系统或子系统、组件形式的能够进行计算的元件的真实世界的、逻辑的、或虚拟化的实现方式,而不论是在服务器、客户端、端点还是对等模式下操作,并且不论位于网络的“边缘”处还是位于进一步处于网络内的连接的位置处。一般而言,对本文中所使用的“节点”的引用与“设备”、“组件”和“子系统”是可互换的;然而,对“边缘计算系统”或“边缘计算网络”的引用一般是指分布式体系结构、组织、或多个节点和设备的集合,并且边缘计算系统或边缘计算网络被组织成用于完成或提供边缘计算设置中的服务或资源的某个方面。
术语“物联网”或“IoT”是指具有能够以较少的人类交互或在没有人类交互的情况下传输数据的相互联系的计算设备、机械和数字机器的系统,并且可涉及诸如实时分析、机器学习和/或AI、嵌入式系统、无线传感器网络、控制系统、自动化(例如,智慧家居、智慧建筑和/或智慧城市技术)等等的技术。IoT设备通常是不具有重度计算或存储能力的低功率设备。“边缘IoT设备”可以是被部署在网络的边缘处的任何种类的IoT设备。
如本文中所使用,术语“集群”是指以物理实体(例如,不同的计算系统、网络或网络群组)、逻辑实体(例如,应用、功能、安全构造、容器)等等的形式、作为边缘计算系统(或多个边缘计算系统)的部分的实体集合或实体分组。在一些位置中,“集群”也指代“群组”或“域”。集群的成员关系可基于包括来自动态成员关系或基于属性的成员关系、来自网络或系统管理场景、或来自下文所讨论的各种示例技术的可添加、修改或移除集群中的实体的状况或功能而被修改或影响。集群还可包括多个层、级别或属性,或与多个层、级别或属性相关联,该多个层、级别或属性包括基于此类层、级别或属性的安全特征和结果的变型。
如本文中所使用,术语“无线电技术”是指用于电磁辐射的无线传送和/或接收以进行信息传递的技术。术语“无线电接入技术”或“RAT”是指用于至基于无线电的通信网络的底层物理连接的技术。术语“V2X”是指交通工具对交通工具(V2V)、交通工具对基础设施(V2I)、基础设施对交通工具(I2V)、交通工具对网络(V2N)、和/或网络对交通工具(N2V)通信和相关联的无线电接入技术。
如本文中所使用,“通信协议”(有线或无线的)是指由通信设备和/或系统实现以与其他设备和/或系统进行通信的一组标准化规则或指令,包括用于对数据进行打包/拆包、对信号进行调制/解调的指令,协议栈的实现方式,等等。
如本文中所使用的术语“信道”是指用于传达数据或数据流的任何有形或无形的传输介质。术语“信道”可与“通信信道”、“数据通信信道”、“传输信道”、“数据传输信道”、“接入信道”、“数据访问信道”、“链路”、“数据链路”、“载波”、“射频载波”、和/或表示传达数据所通过的路径或介质的任何其他类似术语同义,和/或等同于这些术语。附加地,如本文中所使用的术语“链路”是指两个设备之间出于传送和接收信息目的通过RAT进行的连接。
如本文中所使用,术语“无线电技术”是指用于电磁辐射的无线传送和/或接收以进行信息传递的技术。术语“无线电接入技术”或“RAT”是指用于至基于无线电的通信网络的底层物理连接的技术。
如本文中所使用,“通信协议”(有线或无线的)是指由通信设备和/或系统实现以与其他设备和/或系统进行通信的一组标准化规则或指令,包括用于对数据进行打包/拆包、对信号进行调制/解调的指令,协议栈的实现方式,等等。出于本公开的目的,可以使用无线通信协议的示例,无线通信协议包括全球移动通信系统(GSM)无线电通信技术、通用分组无线电服务(General Packet Radio Service,GPRS)无线电通信技术、GSM演进的增强数据速率(Enhanced Data Rates for GSM Evolution,EDGE)无线电通信技术和/或第三代伙伴计划(Third Generation Partnership Project,3GPP)无线电通信技术,包括例如,3GPP第五代(5G)或新无线电(New Radio,NR)、通用移动电信系统(Universal MobileTelecommunications System,UMTS)、自由多媒体接入(Freedom of Multimedia Access,FOMA)、长期演进(Long Term Evolution,LTE)、高级LTE(LTE Advanced)、LTE额外(LTEExtra)、LTE-A加强版(LTE-A Pro)、cdmaOne(2G)、码分多址2000(Code Division MultipleAccess 2000,CDMA 2000)、蜂窝数字分组数据(Cellular Digital Packet Data,CDPD)、Mobitex、电路交换数据(Circuit Switched Data,CSD)、高速CSD(High-Speed CSD,HSCSD)、通用移动电信系统(UMTS)、宽带码分多址(Wideband Code Division MultipleAccess,W-CDM)、高速分组接入(High Speed Packet Access,HSPA)、增强型HSPA(HSPAPlus,HSPA+)、时分-码分多址(Time Division-Code Division Multiple Access,TD-CDMA)、时分-同步码分多址(Time Division-Synchronous Code Division MultipleAccess,TD-SCDMA)、LTE LAA、MuLTEfire、UMTS陆地无线电接入(UMTS Terrestrial RadioAccess,UTRA)、演进型UTRA(Evolved UTRA,E-UTRA)、演进数据优化或仅演进数据(Evolution-Data Optimized or Evolution-Data Only,EV-DO)、高级移动电话系统(Advanced Mobile Phone System,AMPS)、数字AMPS(Digital AMPS,D-AMPS)、全接入通信系统/扩展式全接入通信系统(Total Access Communication System/Extended TotalAccess Communication System,TACS/ETACS)、按键通话(Push-to-talk,PTT)、移动电话系统(Mobile Telephone System,MTS)、改进型移动电话系统(Improved Mobile TelephoneSystemIMTS)、高级移动电话系统(Advanced Mobile Telephone System,AMTS)、蜂窝数字分组数据(Cellular Digital Packet Data,CDPD)、DataTAC、集成数字增强网络(Integrated Digital Enhanced Network,iDEN)、个人数字蜂窝(Personal DigitalCellular,PDC)、个人手持式电话系统(Personal Handy-phone System,PHS)、宽带集成数字增强网络(Wideband Integrated Digital Enhanced Network,WiDEN)、iBurst、非许可移动接入(Unlicensed Mobile Access,UMA)(也被称为3GPP通用接入网络或GAN标准)、
术语“互操作性”是指利用一种RAT的UE和/或站(诸如ITS-S,包括交通工具ITS-S(V-ITS-S)、路边ITS-S(R-ITS-S)和VRU ITS-S)与利用另一种RAT的其他站进行通信的能力。术语“共存”是指使用任一交通工具通信系统在站/UE之间共享或分配射频资源。
术语“V2X”是指交通工具对交通工具(V2V)、交通工具对基础设施(V2I)、基础设施对交通工具(I2V)、交通工具对网络(V2N)、和/或网络对交通工具(N2V)通信和相关联的无线电接入技术。
如本文中所使用的术语“局部化网络”可指覆盖某个区域或地区中有限数量的连接的交通工具的局域网络。如本文中所使用的术语“分布式计算”可指地理上分布在一个或多个局部化网络的终止的附近区域内的计算资源。如本文中所使用的术语“局部数据集成平台”可指通过利用(一个或多个)局部化网络和分布式计算来集成局部数据的平台、设备、系统、网络、或(一个或多个)元件。
如本文中所使用的术语“实例化(instantiate、instantiation)”等等是指实例的创建。“实例”还指对象的具体发生,该对象例如可在程序代码的执行期间发生。术语“信息元素”是指包含一个或多个字段的结构元素。术语“字段”是指信息元素的各个内容或包含内容的数据元素。“数据库对象”、“数据结构”或类似术语可指采用对象、属性-值对(attribute-value pair,AVP)、关键字-值对(key-value pair,KVP)、元组等形式的任何信息表示,并且可包括变量、数据结构、函数、方法、类、数据库记录、数据库字段、数据库条目、数据和/或数据库条目之间的关联(也被称为“关系”)、区块链实现方式中的区块以及区块之间的链接等等。术语“数据元素”或“DE”是指包含一个单数据的数据类型。术语“数据帧”或“DF”是指包含按预定义的次序的多于一个的数据元素的数据类型。
如本文所使用的,术语“可靠性”是指计算机相关组件(例如,软件、硬件或网络元件/实体)一贯地执行期望的功能和/或根据规范进行操作的能力。在网络通信的情境下的可靠性(例如,“网络可靠性”)可指网络进行通信的能力。网络可靠性还可以是将指定数据量从源递送至目的地(或宿)的概率(或者是对该概率的测量)。
术语“应用”可指用于在操作环境中实现某种功能的完整且可部署的包、环境。术语“AI/ML应用”或类似术语可以是包含一些AI/ML模型和应用级描述的应用。术语“机器学习”或“ML”是指使用计算系统在不使用明确的指令而是依赖于模式或推断的情况下来实现算法和/或统计模型以执行(一个或多个)特定任务。ML算法基于样本数据(被称为“训练数据”、“模型训练信息”等)建立或估计(一个或多个)数学模型(被称为“ML模型”等),以便在没有被明确编程为执行此类任务的情况下作出预测或决策。一般而言,ML算法是从相对于某项任务和某个性能测量的经验学习的计算机程序,并且ML模型可以是在ML算法利用一个或多个训练数据集被训练之后创建的任何对象或数据结构。在训练之后,ML模型可以用于作出关于新的数据集的预测。虽然术语“ML算法”是指不同于术语“ML模型”的概念,但是如本文中所讨论的这些术语可出于本公开的目的可互换地使用。术语“会话”是指两个或更多个通信设备之间、两个或更多个应用实例之间、计算机与用户之间、或任何两个或更多个实体或元件之间的临时的且交互性的信息互换。
关于元素或实体(诸如“自我ITS-S”等)使用的术语“自我”是指要被考虑的ITS-S,术语“自我交通工具”是指具体化被考虑的ITS-S的交通工具,并且用于描述元素或实体的术语“邻居”或“邻近”是指不同于自我ITS-S和/或自我交通工具的其他ITS-S。
术语“地理区域”是指诸如圆形区域、矩形区域、和椭圆区域之类的一个或多个几何形状。圆形地理区域通过具有表示圆心的单个点A并且具有半径r的圆形形状来描述。矩形几何区域通过具有表示矩形中心的点A并且具有作为中心点与矩形的短边之间的距离的参数a(短边的垂直平分线)、作为中心点与矩形的长边之间的距离的参数b(长边的垂直平分线)、和作为矩形的长边的方位角的参数θ的矩形形状来限定。椭圆几何区域通过具有表示矩形的中心的点A并且具有作为长半轴的长度的参数a、作为短半轴的长度的参数b、以及作为长半轴的方位角的参数θ的椭圆形状来限定。ITS-S可以使用函数F来确定点P(x,y)是位于地理区域内部、外部、中心处还是边界处。函数F(x,y)假定几何形状的典型形式:笛卡尔坐标系的原点处于形状的中心。该坐标系的横坐标与形状的长边平行。点P相对于该坐标系来限定。函数F(x,y)的各种属性和其他方面在ETSI EN 302 931版本1.1.1(2011年7月)中讨论。
术语“互操作性”是指利用一种通信系统或RAT的ITS-S与利用另一通信系统或RAT的其他ITS-S进行通信的能力。术语“共存”是指使用任一通信系统或RAT在ITS-S之间共享或分配射频资源。
术语“ITS数据字典”是指在ITS应用或ITS设施层中使用的DE和DF的储存库。术语“ITS消息”是指在ITS设施层处在ITS站之间交换的消息或者在ITS应用层处在ITS站之间交换的消息。
术语“集体感知”或“CP”是指基于感知传感器共享感知到的ITS-S环境的概念,其中ITS-S对关于其当前(驾驶)环境的信息进行广播。CP是在不同的ITS-S之间借助V2X RAT主动地交换当地感知到的对象的概念。CP通过向ITS-S的相互FoV贡献信息而降低了ITS-S的环境不确定性。术语“集体感知基本服务”(也被称为CP服务(CP service,CPS))是指ITS-S设施层处用于接收并处理CPM、并且生成并传送CPM的设施。术语“集体感知消息”或“CPM”是指CP基本服务PDU。术语“集体感知数据”或“CPM数据”是指部分的或完整的CPM有效载荷。术语“集体感知协议”或“CPM协议”是指用于CPM生成、传送和接收的操作的ITS设施层协议。术语“CP对象”或“CPM对象”是指由感知传感器收集的、关于其他交通参与方和障碍物的经聚合和解释的抽象信息。CP/CPM可以由描述其动力学状态和几何尺寸的一组变量等在数学上进行表示。与对象相关联的状态变量被解释为针对某个时间点的观察,并且由此总是伴随有时间参考。术语“环境模型”是指ITS-S的紧邻的环境的当前表示,包括由任一本地感知传感器感知或由V2X接收的所有感知到的对象。在CP基本服务的情境中,术语“对象”是指在传感器的感知范围内物理地检测到的对象的状态空间表示。术语“对象列表”是指在时间上与同一时间戳对准的对象的集合。
术语“ITS中央系统”是指后端(例如,交通控制中心、交通管理中心、或来自道路当局、ITS应用提供商或汽车OEM的云系统)中的ITS系统(参见例如,[EN302665]第4.5.1.1款)。
在便携式设备(例如,行人的移动设备)的情境中,术语“个人ITS-S”是指游牧式ITS子系统中的ITS-S。
术语“交通工具”可指:被设计成用于在公共道路和公路上载人或载货的道路交通工具,诸如AV、公共汽车、汽车、卡车、货车、房车和摩托车;在水上载人或载货的交通工具,诸如船只、船舶等;或在空中载人或载货的交通工具,诸如飞机、直升机、无人机、卫星等。
术语“传感器测量”是指由(一种或多种)特征提取算法生成或提供的抽象对象描述,其可基于安装至ITS-S的本地感知传感器的测量原理。特征提取算法处理传感器的原始数据(例如,反射图像、相机图像等)以生成对象描述。术语“状态空间表示”是对检测到的对象的数学表示,其包括诸如距离、速度、对象尺寸等之类的状态变量。与对象相关联/关联至对象的状态变量被解释为针对某个时间点的观察,并且由此伴随有时间参考。
术语“操纵”或“操控”是指在某个动量(速度、速度变化和交通工具质量)内将动作方(例如,行人、交通工具或任何其他形式的交通运输)从一个位置带至另一位置的特定的和所识别的移动。术语“操纵协调”或“MC”是指借助V2X RAT来共享基于感知传感器、规划的轨迹等等的ITS-S的预期移动或一系列预期移动的概念,其中,ITS-S对与其当期预期操纵有关的信息进行广播。术语“操纵协调基本服务”(也被称为操纵协调服务(MCS))是指ITS-S设施层处用于接收并处理MCM、并且生成并传送MCM的设施。术语“操纵协调消息”或“MCM”是指MC基本服务PDU。术语“操纵协调数据”或“MCM数据”是指部分的或完整的MCM有效载荷。术语“操纵协调协议”或“MCM协议”是指用于MCM生成、传送和接收的操作的ITS设施层协议。术语“MC对象”或“MCM对象”是指由感知传感器收集的关于其他交通参与方和障碍物的经聚合和解释的抽象信息、以及来自由ITS-S操作或消费的应用和/或服务的信息。
虽然前述示例中的许多示例在使用特定的蜂窝/移动网络术语的情况下(包括在使用4G/5G 3GPP网络组件(或预期的基于太赫兹的6G/6G+技术)的情况下)被提供,但是将理解的是,这些示例可应用于广域无线网络和局域无线网络的许多其他部署、以及有线网络的整合(包括光学网络及相关联的光纤、收发机等)。此外,各种标准(例如,3GPP、ETSI等)可定义各种消息格式、PDU、容器、帧等,如包括任选的或强制性的数据元素(DE)、数据帧(DF)、信息元素(IE)等等的序列。然而,应当理解,任何特定标准的要求均不应被解释为限制性的并且如此,容器、帧、DF、DE、IE、值、动作和/或特征的任何组合在各实现方式中是可能的,包括严格要求被遵循以便符合此类标准的容器、DF、DE、值、动作和/或特征的任何组合或者强烈推荐和/或与任选的要素一起使用或在存在/不存在任选的要素的情况下使用的容器、帧、DF、DE、IE、值、动作和/或特征的任何组合。
本文中单独地和/或共同地引用的主题仅仅是为了方便起见,并且不旨在将本发明的范围自愿限制到任何单个公开的实现方式。本公开旨在涵盖所示出和所描述的实现方式的任何和全部修改或变体。在回顾本公开时,所公开的实现方式和本文中未具体描述的其他实现方式的组合就对于本领域内技术人员而言将是显而易见的。因此,本公开不应当被认为是限制意义的。本发明的范围由所附权利要求书以及这些权利要求所授予的等效技术方案的完整范围来阐明。
- 生成易受伤害道路使用者轨迹预测模型的方法及预测方法
- 生成易受伤害道路使用者轨迹预测模型的方法及预测方法