基于复合型虎克铰的两转一移冗余驱动并联机构
文献发布时间:2024-01-17 01:14:25
技术领域
本发明涉及并联机构,属于机器人领域,特别涉及一种基于复合型虎克铰的两转一移冗余驱动并联机构。
背景技术
少自由度并联机构因加工制造、控制和维护成本低已成为学术界和工业界关注的热点和前沿,并已经成功地应用于诸多领域。其中,具有两转动一移动(简称2R1T)的三自由度并联机构是少自由度并联机构最具代表性的一类,以2R1T并联机构作为高端制造装备主机构的成功范例有Tricept、Ecospeed和Exechon等混联机器人,这些混联机器人在航空航天和汽车等领域被广泛应用,并且取得了良好的经济效益。2R1T三自由度并联机构具有两条转轴,这两条转轴的几何关系与这类机构的运动性能密切相关,但是,目前大部分的2R1T三自由度并联机构的两条转轴不是连续转轴,所以带来了机构运动学模型复杂,增加了轨迹规划、运动学参数标定和运动控制难度等问题。
并联机构相比于串联机构具有结构紧凑、刚度高、精度高、速度快、承载能力强、惯性小、稳定性好、逆运动学简单等优点,但是,并联机构的工作空间小、存在奇异位形等缺点也不能忽视。冗余驱动并联机构是指其机构驱动装置个数多于自由度数的并联机构,从运动学来讲,有一组或以上的驱动装置是多余的,将这些驱动装置去掉后并不影响运动特性,但在重载操作装备中,为了提高机构的承载能力,增加机构的刚度与稳定性,通常将驱动系统设计成冗余驱动。因此,冗余驱动具有使机构结构具有局部对称性、无奇异位形等特点,以此优化机构的刚度和承载力等性能。通过在原有机构的基础上添加冗余驱动支链的方法可以减少机构的奇异,增加其可用工作空间,还可以改善机构的一些性能,如增强机构刚度、增大机构承载能力、优化驱动的输入力、减低机构关节内力等。
发明内容
针对现有技术存在的问题,发明提供了一种基于复合型虎克铰的两转一移冗余驱动并联机构,通过对并联结构分支支链的冗余布置与位置布局,使并联机构转动过程具有连续的两条转轴,增强机构运动的解耦性,降低机构运动分析难度,同时增加并联机构驱动过程的承载能力,消除工作空间内的奇异位点,实现并联机构在全域工作空间内的大承载驱动需求,提升重载并联机构可靠性,具有承载能力强、无死点位置、高刚度、机械单元可替换性的优点。
本发明提供了一种基于复合型虎克铰的两转一移冗余驱动并联机构,其包括定平台、动平台以及连接定平台和动平台的六条运动支链,所述运动支链包括第一支链、第二支链、第三支链、第四支链、第五支链和第六支链,每条所述运动支链均包括驱动杆和虎克铰口,所述第一支链、第三支链、第五支链和第六支链为RPU构型,其中R代表转动副,P代表移动副,U代表万向铰,所述第一支链、第三支链、第五支链和第六支链分别通过转动副与所述定平台连接,且通过虎克铰口与所述动平台连接,所述驱动杆中的两连杆通过移动副连接,所述驱动杆的第一端与所述定平台转动连接,所述驱动杆的第二端通过虎克铰口与所述动平台连接;所述第二支链、第四支链为UPR构型,所述第二支链和第四支链通过虎克铰口与所述定平台转动连接,且通过转动副与所述动平台连接,所述驱动杆的第一端通过虎克铰口与所述定平台连接,所述驱动杆的第二端通过转动副与所述动平台连接;所述第一支链、第五支链通过共用第一万向铰与所述动平台连接,所述第一万向铰包括与所述动平台连接的第一支链、第五支链的转动副,所述第三支链和第六支链通过共用第三万向铰与所述动平台连接,所述第三万向铰包括与所述动平台连接的第三支链、第六支链的转动副;所述第一转动副、第二万向铰、第三转动副和第四万向铰沿逆时针对称布置在所述定平台的四角处,所述第一转动副轴线、第三转动副轴线、第五转动副轴线和第六转动副轴线均相互平行,所述第一转动副与所述第三转动副的连线为第一对角线,所述第二万向铰与所述第四万向铰的连线为第二对角线,所述第一对角线与所述第二对角线的交点为所述定平台的几何中心点;所述第一万向铰、第二转动副、第三万向铰和第四转动副沿逆时针对称布置在所述动平台的四角处,所述第一万向铰与所述第三万向铰的连线为第三对角线,所述第二转动副与所述第四转动副的连线为第四对角线,所述第三对角线与所述第四对角线的交点为所述动平台的几何中心点;所述第二万向铰与所述第四万向铰的连线为第一转轴且位于所述定平台上,所述第一万向铰与所述第三万向铰的连线为第二转轴且位于所述动平台上,所述第一转轴与所述第二转轴在机构运动中连续且异面垂直,将绕定平台的X轴和动平台的y轴的转动分解到所述第一转轴和第二转轴上,控制所述驱动杆中移动副运动,从而实现绕定平台的X轴和动平台的y轴方向独立转动控制。本发明的复合型虎克铰构型有效减少从动副数量,降低驱动中运动副的运动误差干扰,同时提高了整体刚度。
可优选的是,所述第一转动副轴线与所述第一移动副、第三转动副轴线垂直,所述第二移动副的轴线与所述第二转动副的轴线垂直,所述第三转动副轴线与所述第三移动副轴线垂直,所述第四转动副轴线与所述第四移动副轴线垂直,所述第五转动副轴线与所述第五移动副轴线垂直,所述第六转动副轴线与所述第六移动副轴线垂直。
可优选的是,所述定平台和动平台均为菱形结构,当所述动平台与所述定平台平行时,所述第一万向铰在定平台上的投影点为所述第一转动副与第五转动副连线的中点,所述第三万向铰在定平台上的投影点为所述第三转动副与第六转动副连线的中点。
可优选的是,位于所述定平台上第二万向铰的内转动副轴线与所述第二转动副轴线平行,所述第四万向铰的内转动副轴线与所述第四转动副轴线平行,所述第二转动副轴线与所述第四转动副轴线平行。
可优选的是,位于所述动平台上第二转动副轴线与所述第四转动副轴线平行,所述第一万向铰的外转动副轴线与所述第一移动副轴线垂直,所述第一万向铰的内转动副轴线与所述第五移动副轴线垂直,所述第三万向铰的外转动副轴线与所述第三移动副轴线垂直,所述第三万向铰的内转动副轴线与所述第六移动副轴线垂直。
可优选的是,所述定平台上的第一转动副、第三转动副、第五转动副、第六转动副、第二万向铰外转动副和第四万向铰外转动副的轴线异面垂直于所述动平台上的第一万向铰外转动副、第三万向铰外转动副、第二转动副、第四转动副的轴线。
可优选的是,所述第二万向铰的外转动副轴线与所述第四万向铰的外转动副轴线共线,第二万向铰的外转动副轴线穿过所述定平台的几何中心,轴线方向为定平台的X轴转动方向,所述第一万向铰的外转动副轴线与所述第三万向铰的外转动副轴线共线,第一万向铰的外转动副轴线穿过所述动平台的几何中心,轴线方向为动平台的y轴转动方向;所述定平台几何中心与所述动平台几何中心的连线为Z轴移动方向,且定平台的X轴与动平台的y轴运动过程中异面垂直,Z轴移动方向垂直于定平台的X轴转动方向和动平台的y轴转动方向。
本发明与现有技术相比,具有如下优点:
1、本发明基于复合型虎克铰的两转一移冗余驱动并联机构,设置的第一转轴和第二转轴在机构的运动过程中保持连续,且两条转轴相互垂直,运动相互独立,不产生线性相关,转动中直接分解到两条转轴上,运动解耦性好,通过控制驱动杆移动实现该并联机构在X轴、y轴转动方向上的独立控制,降低了控制难度,实用性高。
2、本发明基于复合型虎克铰的两转一移冗余驱动并联机构,采用复合虎克铰构型,两个支链通过共用万向铰连接,且所述复合型虎克铰构型有效减少从动副数量,降低驱动中运动副的运动误差干扰,有利于提高机构整体刚度,且复合型虎克铰有效利用了平台空间,有利于整体机构轻量化设计和结构优化。
3、本发明基于复合型虎克铰的两转一移冗余驱动并联机构,采用了冗余支链布置,增加了驱动副数量,增强了机构整体承载能力,同时冗余的驱动副具有为机构在工作空间原有的奇异点位置处提供有效驱动的能力,消除了工作空间内的奇异位点,保证了机构在全域工作空间内的力传递稳定性,避免机构在大承载情况下经过奇异位点失控的问题。
附图说明
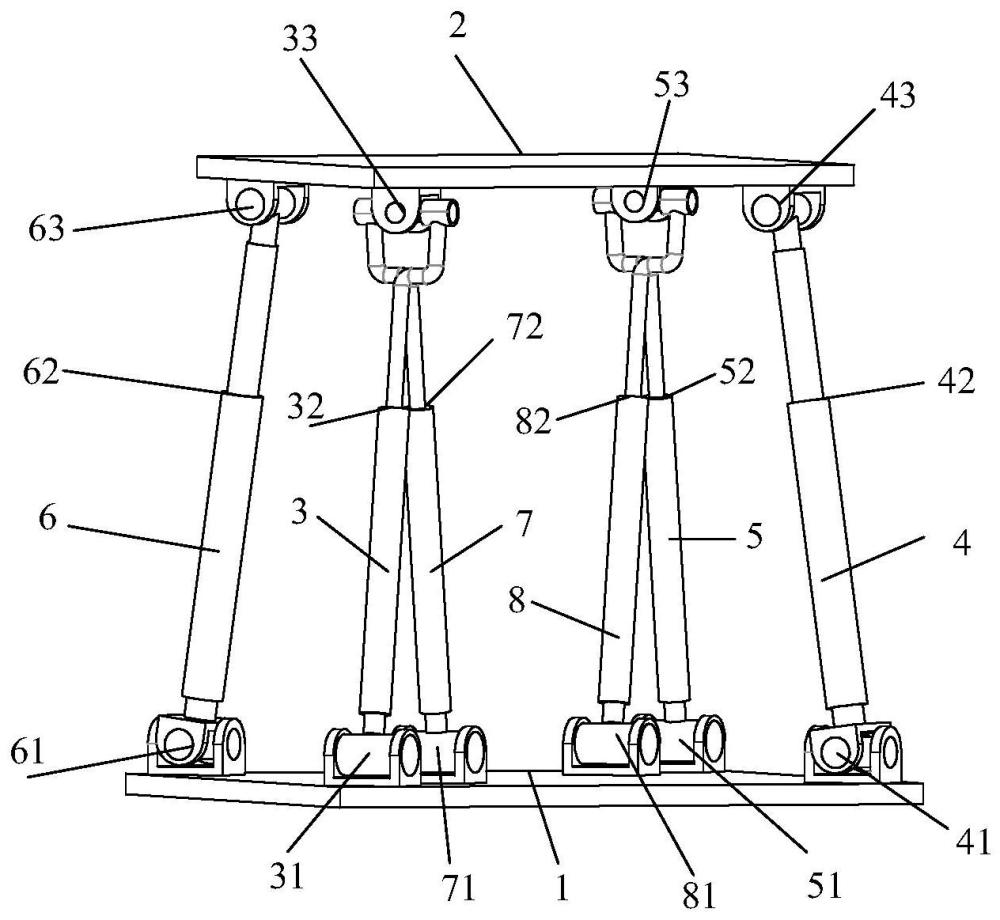
图1是本发明基于复合型虎克铰的两转一移冗余驱动并联机构的整体结构正视示意图;
图2是本发明基于复合型虎克铰的两转一移冗余驱动并联机构的立体结构示意图;
图3是本发明基于复合型虎克铰的两转一移冗余驱动并联机构的俯视示意图;
图4是本发明基于复合型虎克铰的两转一移冗余驱动并联机构的原理示意图;
图5是本发明中复合虎克铰与运动支链连接的结构示意图;
图6是本发明中复合虎克铰、运动支链和动平台连接的结构示意图。
主要附图标记:
1-定平台,2-动平台,3-第一支链,31-第一转动副,32-第一移动副,33-第一万向铰,4-第二支链,41-第二万向铰,42-第二移动副,43-第二转动副,5-第三支链,51-第三转动副,52-第三移动副,53-第三万向铰,6-第四支链,61-第四万向铰,62-第四移动副,63-第四转动副,7-第五支链,71-第五转动副,72-第五移动副,8-第六支链,81-第六转动副,82-第六移动副。
具体实施方式
为详尽本发明之技术内容、结构特征、所达成目的及功效,以下将结合说明书附图进行详细说明。
本发明基于复合型虎克铰的两转一移冗余驱动并联机构,如图1所示,其包括定平台1、动平台2以及连接定平台1和动平台2的六条运动支链,运动支链包括第一支链3、第二支链4、第三支链5、第四支链6、第五支链7和第六支链8,每条运动支链均包括驱动杆和虎克铰口,第一支链3、第三支链5、第五支链7和第六支链8从下至上为RPU构型,即R代表转动副,P代表移动副,U代表万向铰,第一支链3、第三支链5、第五支链7和第六支链8分别通过转动副与定平台1连接,且通过虎克铰口与动平台2连接,驱动杆中的两连杆通过移动副连接,驱动杆的第一端与定平台1转动连接,驱动杆的第二端通过虎克铰口与动平台2连接。第二支链4和第四支链6从下至上为UPR构型,第二支链4和第四支链6通过虎克铰口与定平台1转动连接,且通过转动副与动平台2连接,驱动杆的第一端通过虎克铰口与定平台1连接,驱动杆的第二端通过转动副与动平台2连接。第一支链3、第五支链7通过共用第一万向铰33与动平台2连接,第一万向铰33包括与动平台2连接的第一驱动杆32、第五驱动杆72的转动副,第三支链5和第六支链8通过共用第三万向铰53与动平台2连接,第三万向铰53包括与动平台2连接的第三驱动杆52、第六驱动杆82的转动副。第一转动副31、第二万向铰41、第三转动副51和第四万向铰61沿逆时针对称布置在定平台1的四角处,即定平台1的几个转角处。第一转动副31轴线、第三转动副51轴线、第五转动副71轴线、第六转动副81轴线均相互平行,第一转动副31与第三转动副51的连线为第一对角线,第二万向铰41与第四万向铰61的连线为第二对角线,第一对角线与第二对角线的交点为定平台1的几何中心点。
如图2所示,第一万向铰33、第二转动副43、第三万向铰53和第四转动副63沿逆时针对称布置在动平台2的四角处,第一万向铰33与第三万向铰53的连线为第三对角线,第二转动副43和第四转动副63的连线为第四对角线,第三对角线与第四对角线的交点为动平台2的几何中心点。第二万向铰41与第四万向铰61的连线为第一转轴且位于定平台1上,第一万向铰33与第三万向铰53的连线为第二转轴且位于动平台2上,第一转轴与第二转轴在机构运动中连续且异面垂直,将绕X轴、y轴的转动分解到第一转轴和第二转轴上,控制驱动杆中移动副运动,从而实现绕X轴、y轴方向独立转动控制。且复合型虎克铰构型有效减少了从动副数量,降低驱动中运动副的运动误差干扰,同时提高了整体刚度。定平台1和动平台2均为四边形结构、例如菱形结构,当动平台2与定平台1平行时,第一万向铰33在定平台1上的投影点为第一转动副31与第五转动副71连线的中点,第三万向铰53在定平台1上的投影点为第三转动副51与第六转动副81连线的中点。位于动平台2上第二转动副43轴线与第四转动副63轴线平行,第一万向铰33的外转动副轴线与第一移动副32轴线垂直,第一万向铰33的内转动副轴线与第五移动副72轴线垂直,第三万向铰53的外转动副轴线与第三移动副52轴线垂直,第三万向铰53的内转动副轴线与第六移动副82轴线垂直。定平台1上的第一转动副31、第三转动副51、第五转动副71、第六转动副81、第二万向铰41外转动副和第四万向铰6外转动副的轴线异面垂直于动平台2上的第一万向铰33外转动副、第三万向铰53外转动副、第二转动副43、第四转动副63的轴线。其中,定平台1的各种转轴以大写字母X、Y和Z表示,动平台2的各个转轴以小写字母x、y和z表示。
如图3所示,第一转动副31轴线与第一移动副32、第三转动副43轴线垂直,第二移动副42的轴线与第二转动副43的轴线垂直,第三转动副轴线51与第三移动副52轴线垂直,第四转动副63轴线与第四移动副62轴线垂直,第五转动副轴线71与第五移动副72轴线垂直,第六转动副轴线81与第六移动副82轴线垂直。位于定平台1上第二万向铰41的内转动副轴线与第二转动副43轴线平行,第四万向铰61的内转动副轴线与第四转动副63轴线平行,第二转动副43轴线与第四转动副63轴线平行。
如图4~图6所示,第二万向铰41的外转动副轴线与第四万向铰61的外转动副轴线共线,其轴线穿过定平台1的几何中心,轴线方向为X轴转动方向,第一万向铰33的外转动副轴线与第三万向铰53的外转动副轴线共线,其轴线穿过动平台2的几何中心,轴线方向为y轴转动方向。定平台1几何中心与动平台2几何中心的连线为该机构的Z轴移动方向,且X轴与y轴运动过程中异面垂直,Z轴移动方向垂直于X轴转动方向和y轴转动方向,X轴转动方向的位置和方向固定不变,y轴绕X轴转动方向转动。定平台1的中心到第一转动副31的半轴11的长度与定平台1的中心到第三转动副51的半轴13的长度相等,定平台1的中心到第二万向铰41的半轴12的长度与定平台1的中心到第四万向铰61的半轴14的长度相等。动平台2的中心到第一万向铰33的半轴21的长度与动平台2的中心到第三万向铰53的半轴23的长度相等,动平台2的中心到第二转动副43的半轴22的长度与动平台2的中心到第四转动副63的半轴24的长度相等。
以下结合实施例对本发明基于复合型虎克铰的两转一移冗余驱动并联机构做进一步描述:
本发明包括六个分别驱动第一支链3的第一移动副32、第二支链4的第二移动副42、第三支链5的第三移动副52、第四支链6的第四移动副62、第五支链7的第五移动副72和第六支链8的第六移动副82的的直线驱动装置,例如常规的液压装置、气动装置等。
本发明具有两转动一移动三个自由度,应当指出的是,当描述机构的自由度时,转动和移动是并列关系,而不是先后关系。构成第二支链4的第二万向铰41的外转动副轴线、第四支链6的第四万向铰61的外转动副轴线共线,轴线方向为X轴转动方向。构成第一支链3的第一万向铰33的外转动副轴线、第三支链5的第三万向铰53的外转动副轴线共线,轴线方向为Y轴转动方向。定平台1与动平台2的正多边形几何中心的连线方向的移动为该并联机构的Z轴移动自由度方向。X轴转动方向与y轴转动方向始终空间异面垂直,移动方向垂直于X轴转动、y轴转动方向。X轴转动的位置和方向是固定不变的,即y轴绕X轴转动。
初始位置时,定平台1与动平台2平行。在该并联机构运动过程中,动平台2具有两个转动一个移动3个自由度,在驱动系统的控制下,动平台2会发生绕X轴转动,绕y轴的转动和沿Z轴的移动,这三个自由度是并列的关系,并不存在先后关系。
本发明除具有两条连续的转动自由度轴线简称连续转轴外,还具有三条冗余支链。实现并联机构冗余驱动主要有两种方式:
(1)在原有机构上增加冗余驱动支链,或者将原有被动关节替换为主动关节。
(2)在非冗余全驱动并联机构上增加约束支链或关节,以降低原有机构自由度。本发明具有三条冗余驱动支链,由于本发明机构的特殊性,在第一支链3、第二支链4、第三支链5、第四支链6和第五支链7中有三个支链是冗余支链。可以选择第一支链3、第二支链4、第三支链5、第四支链6和第五支链7中任意三个支链作为驱动支链,可以实现两转动一移动自由度。也可以选择第一支链3、第二支链4、第三支链5、第四支链6和第五支链7中任意四个支链作为驱动支链,仍然可以实现两转动一移动。还可以选择第一支链3、第二支链4、第三支链5、第四支链6和第五支链7的五个支链都作为驱动支链,也可以选择第一支链3、第二支链4、第三支链5、第四支链6、第五支链7和第六支链8中的六个支链都作为驱动支链,仍然实现绕X轴,Y轴方向上的转动和Z轴方向的移动。选择第二支链4、第四支链6和第五支链7三个支链为非冗余支链作位置控制,选择第一支链3和第三支链5和第六支链8为冗余支链做力控制,或者选择第一支链3、第三支链5和第五支链7三个支链为非冗余支链做位置控制,选择第二支链4和第四支链6和第六支链8这三个支链为冗余支链做力控制。
本发明基于复合型虎克铰的两转一移冗余驱动并联机构,通过采用基于复合虎克铰的关键结构设计以及冗余驱动支链布置,使机构实现绕X轴,y轴方向上的转动和Z轴方向的移动,具有优良的运动解耦性能,有效提升了并联机构的承载能力,增强了机构的刚度,消除了工作空间内的奇异位点,提高了并联机构在全域工作空间下的重载能力。
以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
- 一种大转角非共面两转一移冗余驱动并联机构
- 一种可独立控制的两转一移冗余驱动并联机构