一种智能电动剪
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及电动剪技术领域,更具体地说,是涉及一种智能电动剪。
背景技术
电动剪刀常常被用于修剪树枝,以保持树木、灌木的美好外形。电动剪可以起到省力的效果,例如,扳动一下扳机开关就发出一个闭合信号,以控制剪刀做剪切动作,即闭合;放开扳机复位就发出一个打开的信号,以控制剪刀做张开动作,即打开。但是现有技术中的电动剪,控制电动剪开与合只有二个位,即开位(二片剪刀片交叉张开)与合位(二片剪刀片刀刃合拢),闭合过程即为剪切过程,其闭合过程中的闭合速度与位置不可控,一但误触发极易发生伤人事故,安全性差,而且操作人员不能手动控制剪刀合位至任一角度位置,使用上受限。
发明内容
本发明的目的在于提供一种智能电动剪,以解决现有技术中的电动剪只有开位与合位,其闭合过程中的闭合速度与位置不可控,一但误触发极易发生伤人事故,安全性差,而且操作人员不能手动控制剪刀合位至任一角度位置,使用上受限的技术问题。
为实现上述目的,本发明采用的技术方案是:
本发明提供一种智能电动剪,包括:
智能电动剪本体;
扳机式脉冲发生器,所述扳机式脉冲发生器设置在所述智能电动剪本体上,所述扳机式脉冲发生器用于发出单个或多个连续的脉冲信号;
电路板,所述扳机式脉冲发生器与所述电路板电连接;
驱动组件,所述电路板与所述驱动组件电连接;
剪刀组件,所述驱动组件与所述剪刀组件连接以驱动所述剪刀组件剪合,并可驱动所述剪刀组件形成任一剪合角度。
根据上述所述的智能电动剪,所述扳机式脉冲发生器包括:
定片,所述定片与所述智能电动剪本体包括的壳体连接;
动片,所述动片与所述定片可转动连接;
手把,所述手把与所述动片固定连接,并延伸出所述壳体的外部;
脉冲发生单元,所述脉冲发生单元置于所述定片和所述动片之间,所述脉冲发生单元与所述电路板电连接,并可通过所述动片相对所述定片的转动产生脉冲信号传输至所述电路板。
根据上述所述的智能电动剪,所述扳机式脉冲发生器还包括扭转弹簧;
所述定片靠近所述动片的一侧设有第一卡槽,所述动片靠近所述定片的一侧设有第二卡槽,所述扭转弹簧设于所述定片和所述动片之间,且所述扭转弹簧的第一定位凸块设于所述第一卡槽内,所述扭转弹簧的第二定位凸块设于第二卡槽内。
根据上述所述的智能电动剪,所述驱动组件包括:
驱动模块,所述电路板与所述驱动模块电连接;
驱动机构,所述驱动机构包括:
驱动电机,所述驱动模块与所述驱动电机双向电连接;
位移调节组件,所述位移调节组件的一端与所述驱动电机连接,所述位移调节组件的另一端与所述剪刀组件连接。
根据上述所述的智能电动剪,所述位移调节组件包括:
滚珠丝杆,所述滚珠丝杆与所述驱动电机连接,所述滚珠丝杆的外部设有弧形螺旋槽;
丝杆螺母,所述丝杆螺母与所述剪刀组件连接,所述丝杆螺母套设于所述滚珠丝杆的外侧,并在所述弧形螺旋槽内填满滚珠,所述滚珠丝杆相对所述丝杆螺母旋转运动时,所述滚珠丝杆与所述杆螺母之间发生轴向位移。
根据上述所述的智能电动剪,所述驱动机构还包括至少一个连杆,所述连杆的一端与所述丝杆螺母连接,所述连杆的另一端与所述剪刀组件连接。
根据上述所述的智能电动剪,所述连杆的数量为两个,两个所述连杆分别设于所述丝杆螺母的两侧并与所述丝杆螺母的外侧壁连接,且两个所述连杆呈中心对称。
根据上述所述的智能电动剪,所述剪刀组件包括:
剪刀动片,所述剪刀动片与所述连杆连接;
剪刀定片,所述剪刀定片与所述剪刀动片连接,且所述剪刀动片可相对所述剪刀定片转动,所述剪刀定片还与所述智能电动剪本体的壳体连接。
根据上述所述的智能电动剪,所述剪刀动片上设有第一销钉孔,所述剪刀定片上设有第二销钉孔,所述销钉依次穿过所述第二销钉孔、第一销钉孔,且所述销钉的端部与设于所述剪刀动片远离所述剪刀定片一侧的锁垫片连接。
根据上述所述的智能电动剪,所述智能电动剪还包括供电模块,所述供电模块与所述电路板、所述扳机式脉冲发生器以及所述驱动组件均电连接。
本发明提供的智能电动剪的有益效果至少在于:
(1)本实施例提供的智能电动剪,采用了扳机式脉冲发生器作为智能电动剪的操控信号源,即可以通过人为手动操作扳机式脉冲发生器以发出单个或连续的脉冲信号,以使得剪刀组件剪合,并可使得剪刀组件剪合形成任一剪合角度和可控制的剪合速度,可控性强,使用更安全,从而智能化地控制剪刀组件的剪合角度与扳机同步运动,适用范围更广。
(2)本实施例提供的智能电动剪,剪刀组件的剪合角度和速度受扳机式脉冲发生器的实时同步控制,无延时,提高了产品的可靠性,同时也提高了用户的使用体验。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明实施例提供的智能电动剪的结构示意图;
图2为本发明实施例提供的智能电动剪控制原理电路结构示意图;
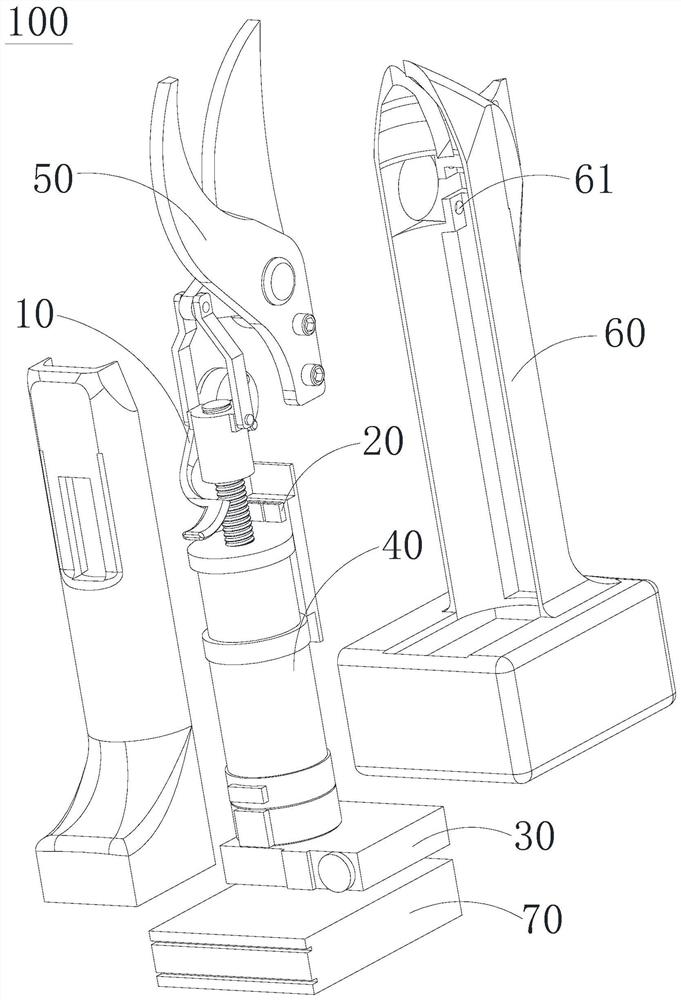
图3为本发明实施例提供的智能电动剪的爆炸结构示意图;
图4为本发明实施例提供的扳机式脉冲发生器的爆炸结构示意图;
图5为本发明实施例提供的扳机式脉冲发生器的另一视角爆炸结构示意图;
图6为本发明实施例提供的驱动机构和剪刀组件的结构示意图;
图7为本发明实施例提供的驱动机构和剪刀组件的爆炸结构示意图。
其中,图中各附图标记:
具体实施方式
为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
需要说明的是,当部件被称为“固定于”或“设置于”另一个部件,它可以直接或者间接位于该另一个部件上。当一个部件被称为“连接于”另一个部件,它可以是直接或者间接连接至该另一个部件上。术语“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置为基于附图所示的方位或位置,仅是为了便于描述,不能理解为对本技术方案的限制。术语“第一”、“第二”仅用于便于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明技术特征的数量。“多个”的含义是两个或两个以上,除非另有明确具体的限定。
请参阅图1至图3,本实施例提供了一种智能电动剪100,包括:智能电动剪本体;扳机式脉冲发生器10,所述扳机式脉冲发生器10设置在所述智能电动剪本体上,所述扳机式脉冲发生器10用于发出单个或多个连续的脉冲信号;电路板20,所述扳机式脉冲发生器10与所述电路板20电连接;驱动组件,所述电路板20与所述驱动组件电连接;剪刀组件50,所述驱动组件与所述剪刀组件50连接以驱动所述剪刀组件50剪合,并可驱动所述剪刀组件50形成任一剪合角度。可选地,电路板上的控制芯片可以是HC32M140,也可以是西门子IPC427D。应当理解的是,控制芯片的型号并不限于为上述情形,还可以是其他型号,此处不作限制。
本实施例提供的智能电动剪100的工作原理如下:
本实施例提供的智能电动剪100,其扳机式脉冲发生器10发出单个或多个连续的脉冲信号,并传输至电路板20,电路板20发出驱动信号至驱动组件,驱动组件驱动剪刀组件50剪合并可对应脉冲的数量形成任一剪合角度,当扳机式脉冲发生器10发出反向脉冲信号时,通过驱动组件的作用剪刀组件50的反向运动,并对应脉冲的数量可停止任何位置,或者恢复至原位,即开位,从而智能化地控制剪刀组件50的剪合角度与扳机同步运动。
本实施例提供的智能电动剪100的有益效果至少在于:
(1)本实施例提供的智能电动剪100,采用了扳机式脉冲发生器10作为智能电动剪100的操控信号源,即可以通过人为手动操作扳机式脉冲发生器10以发出单个或连续的脉冲信号,以使得剪刀组件50剪合,并可使得剪刀组件50剪合形成任一剪合角度和可控制的剪合速度,可控性强,使用更安全,从而智能化地控制剪刀组件50的剪合角度与扳机同步运动,适用范围更广。
(2)本实施例提供的智能电动剪100,剪刀组件50的剪合角度和速度受扳机式脉冲发生器10的实时同步控制,无延时,提高了产品的可靠性,同时也提高了用户的使用体验。
在一个实施例中,请参阅图4和图5,所述扳机式脉冲发生器10包括:定片11,所述定片11与所述智能电动剪本体包括的壳体60连接;动片12,所述动片12与所述定片11可转动连接;手把13,所述手把13与所述动片12固定连接,并延伸出所述壳体60的外部;脉冲发生单元,所述脉冲发生单元置于所述定片11和所述动片12之间,所述脉冲发生单元与所述电路板20电连接,并可通过所述动片12相对所述定片11的转动产生脉冲信号传输至所述电路板20。操作人员单次或连续多次施力于延伸设于壳体60外部的手把13上,从而使得与手把13固定连接的动片12可相对定片11转动,脉冲发生单元产生的脉冲信号至电路板20,电路板20发出驱动信号至驱动组件,驱动组件驱动剪刀组件50剪合并可形成任一剪合角度,当撤销对手把13的施力之后,通过驱动组件的作用剪刀组件50的反向运动,并对应脉冲的数量可停止任何位置,或者恢复至原位,即开位。其扳机式脉冲发生器10结构简单,操作方便。
可选地,脉冲发生单元包括脉冲发生元件印刷板14、光源、光电码盘以及光敏传感器,所述光源和所述光敏传感器均与脉冲发生元件印刷板电连接,所述脉冲发生元件印刷板与电路板20连接。操作人员单次或连续多次施力于延伸设于壳体60外部的手把13上,从而使得与手把13固定连接的动片12可相对定片11转动,光源发出的光透过光电码盘,光敏传感器接收信号并传输至与其电连接的脉冲发生元件印刷板14,脉冲发生元件印刷板14将脉冲信号传递给电路板20。
可选地,手把13与动片12为一体式结构,其结构牢固。可选地,定片11上设有连接柱112,所述壳体60上设有连接柱孔61,连接柱112置于连接柱孔61内,使得定片11可以稳定的连接于壳体60上,使得动片12相对定片11转动时,更加平稳。
在一个实施例中,请继续参阅图4和图5,所述扳机式脉冲发生器10还包括扭转弹簧15;所述定片11靠近所述动片12的一侧设有第一卡槽111,所述动片12靠近所述定片11的一侧设有第二卡槽121,所述扭转弹簧15设于所述定片11和所述动片12之间,且所述扭转弹簧15的第一定位凸块151设于所述第一卡槽111内,所述扭转弹簧15的第二定位凸块152设于第二卡槽121内,所述扭转弹簧15可配合所述动片12相对所述定片11正向转动或反向转动。由于设置有扭转弹簧15,所述扭转弹簧15的第一定位凸块151与所述定片11的第一卡槽111配合连接,所述扭转弹簧15的第二定位凸块152与所述动片12的第二卡槽121配合连接,当操作人员施力于手把13时,动片12相对定片11转动,扭转弹簧15会发生扭转变形,即弹性变形,同时也发出正向脉冲信号,剪刀组件50剪合至任一剪合角度;当撤销对手把13的施力时,在扭转弹簧15复位力的驱动下动片12反方向运动,即发出反向脉冲信号,脉冲信号传递给电路板20,电路板20发出驱动信号至驱动组件,通过驱动组件的作用剪刀组件50反向运动至任一位置,或恢复原位,即开合位置。
在一个实施例中,请参阅图5和图6,并结合参阅图2,所述驱动组件包括:
驱动模块30,所述电路板20与所述驱动模块30电连接;
驱动机构40,所述驱动机构40包括:
驱动电机41,所述驱动模块30与所述驱动电机41双向电连接;位移调节组件42,所述位移调节组件42的一端与所述驱动电机41连接,所述位移调节组件42的另一端与所述剪刀组件50连接。当所述驱动模块30发出驱动信号并驱动所述驱动电机41转动时,驱动电机41可以驱动位移调节组件42实现位移调节,进而实现通过位移调节组件42来调节剪刀组件50的剪合,并可通过扳机式脉冲发生器10的作用剪合形成任一剪合角度。
在一个实施例中,请继续参阅图5和图6,所述位移调节组件42包括:滚珠丝杆421,所述滚珠丝杆421与所述驱动电机41连接,所述滚珠丝杆421的外部设有弧形螺旋槽4211;丝杆螺母422,所述丝杆螺母422与所述剪刀组件50连接,所述丝杆螺母422套设于所述滚珠丝杆421的外侧,并在所述弧形螺旋槽4211内填满滚珠,所述滚珠丝杆421相对所述丝杆螺母422旋转运动时,所述滚珠丝杆421与所述杆螺母422之间发生轴向位移。驱动电机41转动以带动与其连接的滚珠丝杆421转动,由于套设于滚珠丝杆421外部的丝杆螺母422同时还与剪刀组件50连接,当滚珠丝杆421转动时,填充在弧形螺旋槽4211内的滚珠会使得滚珠丝杆421与丝杆螺母422之间发生轴向位移,从而实现通过滚珠丝杆421与丝杆螺母422的配合来调节剪刀组件50的剪合,并可通过扳机式脉冲发生器10的作用剪合形成任一剪合角度。
在一个实施例中,所述驱动机构40还包括至少一个连杆43,所述连杆43的一端与所述丝杆螺母422连接,所述连杆43的另一端与所述剪刀组件50连接。连杆43的设置用于将丝杆螺母422和剪刀组件50连接起来,从而实现滚珠丝杆421转动以带动丝杆螺母422朝向远离剪刀组件50的一侧产生轴向位移,进而带动连杆43产生轴向位移,以实现调节剪刀组件50的剪合,并可通过扳机式脉冲发生器10的作用剪合形成任一剪合角度。
在一个实施例中,所述连杆43的数量为两个,两个所述连杆43分别设于所述丝杆螺母422的两侧并与所述丝杆螺母422的外侧壁连接,且两个所述连杆43呈中心对称。上述设置可以使得丝杆螺母422在产生位移时,可以带动位于丝杆螺母422两侧的连杆43同时产生位移,从而使得剪刀组件50也产生位移以实现剪刀组件50的剪合,并可通过扳机式脉冲发生器10的作用剪合形成任一剪合角度。
在一个实施例中,请继续参阅图5和图6,所述剪刀组件50包括:剪刀动片51,所述剪刀动片51与所述连杆43连接;剪刀定片52,所述剪刀定片52与所述剪刀动片51连接,且所述剪刀动片51可相对所述剪刀定片52转动,所述剪刀定片52还与所述智能电动剪本体的壳体60连接。当连杆43产生位移时,可以带动与连杆43连接的剪刀动片51相对剪刀定片52转动,从而实现了剪刀动片51和剪刀定片52配合实现剪合,同时通过扳机式脉冲发生器10的配合可以实现剪刀动片51相对剪刀定片52形成任一剪合角度,可控性强,使用更安全,同时剪刀动片51相对剪刀定片52的剪合角度受扳机式脉冲发生器10的实时控制,无延时,提高了产品的可靠性。
可选地,剪刀定片52与壳体60通过至少一颗螺钉521连接,其不仅连接结构牢固,且方便拆装。可选地,剪刀定片52与壳体60通过两颗螺钉521连接,从而使得剪刀定片52与壳体60连接得更加的牢固,应该理解的是,螺钉521的数量并与限于为上述数值,还可以是其他数值,此处不作限制。
可选地,所述剪刀动片51上设有第一连接孔511,两个所述连杆43上均设有第二连接孔431,且两个所述连杆43分别位于剪刀动片51的两侧,第一连接件穿设于第一连接孔511和第二连接孔431并与第一连接孔511和第二连接孔431配合连接,使得剪刀动片51与连杆43稳定连接。可选地,两个所述连杆43上均还设有第三连接孔432,所述丝杆螺母422的两侧均设有外凸的第二连接件4221,所述第二连接件4221穿设于所述第三连接孔432并与第三连接孔432配合,使得连杆43与丝杆螺母422稳定连接。
在一个实施例中,所述剪刀动片51上设有第一销钉孔512,所述剪刀定片52上设有第二销钉孔522,所述销钉53依次穿过所述第二销钉孔522、第一销钉孔512,且所述销钉53的端部与设于所述剪刀动片51远离所述剪刀定片52一侧的锁垫片54连接。通过销钉53与锁垫片54的配合,可以将剪刀定片52和剪刀动片51连接在一起,并以销钉53作为支点,当剪刀动片51通过连杆43拉动时,剪刀动片51可以相对剪刀定片52相对转动,且结构牢固、转动顺畅、平稳。
在一个实施例中,请参阅图3,所述智能电动剪100还包括供电模块70,所述供电模块70与所述电路板20、所述扳机式脉冲发生器10以及所述驱动组件均电连接。供电模块70用于为所述电路板20、所述扳机式脉冲发生器10以及所述驱动组件提供电能。
综上所述,本实施例提供了一种智能电动剪100,包括:智能电动剪本体;扳机式脉冲发生器10,所述扳机式脉冲发生器10设置在所述智能电动剪本体上,所述扳机式脉冲发生器10用于发出单个或多个连续的脉冲信号;电路板20,所述扳机式脉冲发生器10与所述电路板20电连接;驱动组件,所述电路板20与所述驱动组件电连接;剪刀组件50,所述驱动组件与所述剪刀组件50连接以驱动所述剪刀组件50剪合,并可驱动所述剪刀组件50形成任一剪合角度。本实施例提供的智能电动剪100,采用了扳机式脉冲发生器10作为智能电动剪100的操控信号源,即可以通过人为手动操作扳机式脉冲发生器10以发出单个或连续的脉冲信号,以使得剪刀组件50剪合,并可使得剪刀组件50剪合形成任一剪合角度和可控制的剪合速度,可控性强,使用更安全,从而智能化地控制剪刀组件50的剪合角度与扳机同步运动,适用范围更广。本实施例提供的智能电动剪100,剪刀组件50的剪合角度和速度受扳机式脉冲发生器10的实时同步控制,无延时,提高了产品的可靠性,同时也提高了用户的使用体验。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。