一种7.5°步距角步进电机
文献发布时间:2023-06-19 10:00:31
技术领域
本发明涉及一种步进电机,尤其是涉及一种7.5°步距角步进电机。
背景技术
现有的两相混合式7.5°步距角步进电机结构如下图1和图2所示,其中1A和1C分别为方案一、方案二的定子,2为现有方案的转子,转子可以采用冲片叠压而成,也可以是永磁转子,但都是N、S交替,共12对极。
现有方案一中,定子有8个主极,A相主极A1、A2、A3、A4和B相主极B1、B2、B3、B4,每个主极上有一个定子齿,共8个定子齿TA1、TA2、TA3、TA4和TB1、TB2、TB3、TB4。8个主极按逆时针方向排布的顺序为A1、B1、A2、B2、A3、B3、A4、B4,其间的夹角分别为37.5°、37.5°、37.5°、67.5°、37.5°、37.5°、37.5°、67.5°。
现有方案二中,定子有8个主极,A相主极A1、A2、A3、A4和B相主极B1、B2、B3、B4,每个主极上有一个定子齿,共8个定子齿TA1、TA2、TA3、TA4和TB1、TB2、TB3、TB4。8个主极按逆时针方向排布的顺序为A1、A2、B1、B2、A3、A4、B3、B4,其间的夹角分别为45°、52.5°、45°、37.5°、45°、52.5°、45°、37.5°。
现有方案一和方案二中,存在着两个缺点:
1)定子齿数较少,定子齿数与转子极对数的比例较低,导致电机的整体输出转矩较低。现有方案1、2中,定子齿数/转子极对数为:8/12=0.75。
2)当定子外径小于20mm时,电机的槽口会很小,对电机绕线造成困难;同时因为绕组是缠绕在电机主极上,绕线嘴的进出槽的空间会占用槽内面积,影响电机槽满率,进一步影响电机的输出转矩。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种7.5°步距角步进电机。
本发明的目的可以通过以下技术方案来实现:
一种7.5°步距角步进电机,包括绕组、转子和定子,所述转子设有12对极,所述定子为分体式结构,其包括偶数个形状相同的定子块,每个所述定子块分布有至少两个定子齿,每个定子块中的相邻定子齿之间形成用于绕组绕制的定子轭部。
优选地,所述定子轭部的外径小于定子外径。
优选地,相邻所述定子块之间的夹角为52.5°或37.5°,所述定子块为一头宽另一头窄的结构,所述定子齿设在窄的一头。
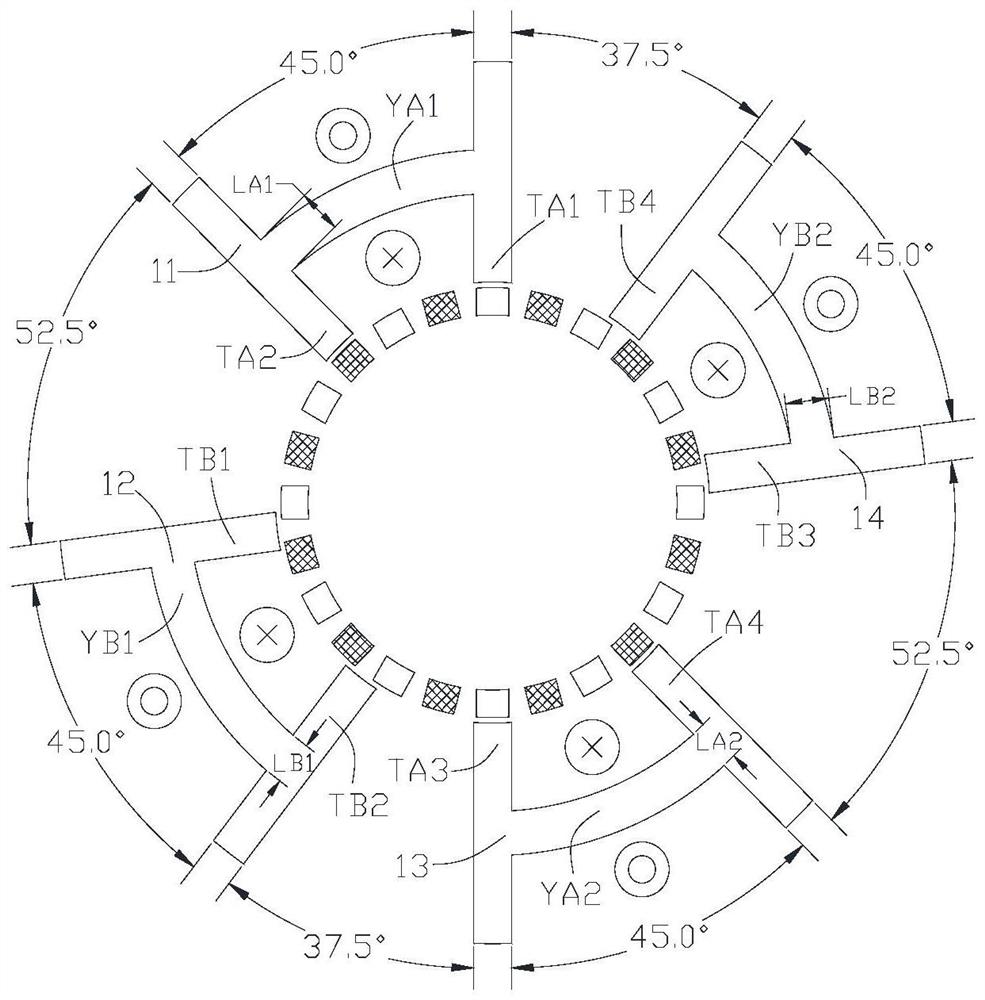
优选地,所述定子块设有四个,且每个定子块上设有两个定子齿,两个定子齿之间的夹角为45°。
优选地,按逆时针方向,四个定子块依次为定子块11、定子块12、定子块13和定子块14,定子块间的夹角依次为52.5°、37.5°、52.5°、37.5°,其中定子块11和定子块13属于A相,定子块12和定子块14属于B相。
优选地,按逆时针方向,所述定子块11上的定子齿依次为TA1和TA2,所述定子块13上的定子齿依次为TA3和TA4,所述定子块12上的定子齿依次为TB1和TB2,所述定子块14上的定子齿依次为TB3和TB4;
所述定子齿TA1和TA2、TA3和TA4、TB1和TB2、TB3和TB4之间依次限定出定子轭部YA1、YA2、YB1和YB2,其厚度分别为LA1、LA2、LB1和LB2,其中LA1=LA2=LB1=LB2。
优选地,所述定子块设有两个,分别为定子块21和定子块22,其中所述定子块21为A相,所述定子块22为B相,每块定子块上有四个定子齿,两个定子块两端之间的夹角为37.5°和52.5°。
优选地,按顺时针方向,A相定子块21上的定子齿依次为TA1、TA2、TA3和TA4,四个定子齿间的夹角依次为30°、75°、30°;
按顺时针方向,B相定子块22上的定子齿依次为TB1、TB2、TB3和TB4,四个定子齿间的夹角依次为30°、75°、30°;
其中定子齿TA1和TA2、TA3和TA4、TA2和TA3、TB3和TB4、TB1和TB2、TB2和TB3之间依次形成的定子轭部YA1、YA2、YA3、YB1、YB2、YB3的厚度分别为LA1、LA2、LA3、LB1、LB2和LB3,其中LA1=LA2=LB1=LB2,1.0*LA1 优选地,所述定子块设有两个,分别为定子块31和定子块32,其中所述定子块31为A相,所述定子块32为B相,每块定子块上有六个定子齿,两个定子块两端之间的夹角为37.5°和52.5°,定子齿数与转子极数的比例为1。 优选地,按逆时针方向,A相定子块31上的定子齿依次为TA1、TA2、TA5、TA6、TA3和TA4,定子齿间的夹角依次为30°、30°、15°、30°、30°; 其中定子齿TA1和TA2、TA2和TA5、TA5和TA6、TA6和TA3、TA3和TA4之间形成的定子轭部依次为YA1、YA3、YA5、YA4和YA2,定子轭部厚度对应依次为LA1、LA3、LA5、LA4、LA2,其中LA1=LA2,LA3=LA4,1.0*LA1 与现有技术相比,本发明具有以下优点: (1)本发明铁芯分割和轭部绕线技术将大大减小电机槽口尺寸对电机绕线的限制;同时由于绕线是在电机轭部,绕线线嘴的进出空间将在径向方向,不占用电机槽内面积,更有利于提升电机的槽面积的利用率。 (2)本发明铁芯分割技术有利于实现电机的模块化绕线生产,提升电机的生产效率。 (3)本发明能增加电机定子的定子齿数,有利于提升电机磁场的利用率,增大电机的输出转矩。 附图说明 图1为现有方案一的结构示意图; 图2为现有方案二的结构示意图; 图3为实施例1的结构示意图; 图4为实施例2的结构示意图; 图5为实施例3的结构示意图。 具体实施方式 下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。 本发明为了提升电机定子齿数和转子极对数的比例,同时降低电机绕线的难度及提升电机槽满率,现采用如下措施: 1)在极对数不变的情况下,尽量增加电机的定子齿数。 2)采用分割铁心技术,大大减小电机槽口尺寸对电机的绕线的限制,同时,电机的绕组绕制在电机轭部,绕线线嘴不占用电机槽面积,增加了电机的槽满率。 本发明7.5°步距角步进电机,包括绕组、转子和定子,所述定子为分体式结构,其包括偶数个形状相同的定子块,每个所述定子块分布有至少两个定子齿,每个定子块中的相邻定子齿之间形成用于绕组绕制的定子轭部。 实施例1 如图3所示,将整体定子分为四个定子块,四块定子均为相同结构,且每个定子块上设有两个定子齿,两个定子齿之间的夹角为45°。按逆时针方向,四个定子块依次为定子块11、定子块12、定子块13和定子块14,定子块间的夹角依次为52.5°、37.5°、52.5°、37.5°,其中定子块11和定子块13属于A相,定子块12和定子块14属于B相。定子轭部的外径小于定子外径,定子块的形状为一头宽另一头窄的H型。 每个所述定子块的两定子齿之间限定出定子轭部YA1、YA2、YB1和YB2,其厚度分别为LA1、LA2、LB1和LB2,其中LA1=LA2=LB1=LB2。 绕线时,绕线喷嘴从槽口绕着定子轭部上下绕制,线嘴的运动方向为半径方向,区别于绕制在齿上的圆周方向,线嘴在半径方向绕制时,不会占用电机槽的空间,有利于提高电机槽满率。同时,定子块这种结构,大大提高了电机的绕线效率。 实施2 如图4所示,将整体定子分为定子块21和定子块22两块,两块定子相同,其中定子块21为A相,定子块22为B相,每块定子块上有四个定子齿,两个定子块两端之间的夹角为37.5°和52.5°。 按顺时针方向,A相定子块21上的定子齿依次为TA1,TA2,TA3,TA4,四个定子齿间的夹角依次为30°、75°、30°。 按顺时针方向,B相定子块22上的定子齿依次为TB1,TB2,TB3,TB4,四个定子齿间的夹角依次为30°、75°、30°。 相比于实施例1,实施例2增加了新的定子轭部YA3和YB3,这就意味着增加了新的绕线空间,有利于提升电机的输出转矩。 在此实施例中,定子轭部YA1、YA2、YA3、YB1、YB2、YB3的厚度分别为LA1,LA2,LA3,LB1,LB2,LB3(B相轭部厚度未标识出),其中LA1=LA2=LB1=LB2,1.0*LA1 实施例3 如图5所示,实施例3是在实施例2的基础上,在A、B相定子铁芯的定子齿TA2、TA3和TB2、TB3之间分别增加定子齿TA5、TA6和TB5、TB6。两个定子块两端之间的夹角为37.5°和52.5°。 A、B两相定子块增加了定子齿以后,电机定子齿数与转子极数的比例为12/12=1,提升电机磁场利用率,增大了电机的输出转矩。 实施例3中,定子块31和定子块32相同,A相定子块逆时针方向定子齿依次为TA1,TA2,TA5,TA6,TA3,TA4,定子齿间的夹角依次为30°、30°、15°、30°、30°。 A相定子块逆时针方向轭部依次为YA1、YA3、YA5、YA4、YA2,轭部厚度对应为LA1、LA3、LA5、LA4、LA2。其中LA1=LA2,LA3=LA4,1.0*LA1 同时,在定子轭部YA1、YA2、YA3、YA4、YA5上均可以绕制线圈(其中定子轭部YA5的绕线部未标识出)。 以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
- 一种7.5°步距角步进电机
- 一种18°步距角步进电机