一种空情融合精度评估系统及方法
文献发布时间:2023-06-19 10:32:14
技术领域
本发明属于多源信息融合与评估技术领域,尤其适用于复杂环境下多传感器多目标的一种空情融合精度评估系统及方法。
背景技术
空情融合系统是防空指挥控制系统的核心组成之一,是战场态势判断与作战决策的重要情报信息来源,对指挥控制系统的战场感知、指挥决策、火力打击等方面有着重要作用,其性能和效能直接影响防空作战系统的生存能力。精度指标是空情融合系统的一项非常重要的指标,精度指标是指融合系统对获取的目标信息进行观测信息提取、跟踪和综合处理后,融合航迹相对于传感器探测在精度上的优劣程度,反映了系统的跟踪能力和信息引导能力,也是衡量融合算法性能的重要依据。依据信息融合理论,一个优秀的融合算法应能提高航迹信息的精度,但是战场环境是复杂的,影响传感器以雷达为主,探测目标过程的不确定性因素很多,如电磁干扰、气流扰动、山地遮蔽、传感器探测特性等等,这些因素都会导致传感器探测数据的不确定性和不连续性,影响空情融合系统的融合精度,并增加了精度评估的难度,其中如何确定精度评估方法及基准是迫切需要解决的问题。
发明内容
为克服现有技术的不足,本发明提出了一种空情融合精度评估系统及方法,是在复杂环境下针对空情融合系统的精度评估与鉴定。
为实现上述发明目的,本发明采用如下技术方案:
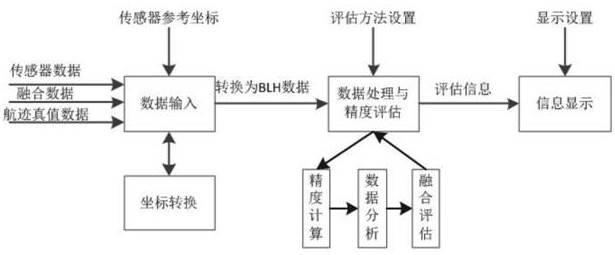
一种空情融合精度评估系统,包括数据输入模块、数据处理与精度评估模块、信息显示模块,数据输入模块通过BLH数据转换器电连接数据处理与精度评估模块,数据处理与精度评估模块输出端通过电缆电连接信息显示模块;所述数据输入模块与坐标转换模块电连接;数据处理与精度评估模块数据端通过精度计算模块、数据分析模块与综合评估模块相连构成回路;
所述数据输入模块为统一的信息输入格式模块,配置传感器精度优先级;所述数据处理与精度评估模块,由精度最高模块、精度最低模块、平均精度模块及自适应权重模块组成,信息显示模块用于输出并显示评估结果。
一种空情融合精度评估方法,依据读取协议存储的数据,确定空间坐标数据与时间戳的对应关系,并根据设置的传感器参考坐标将数据转换为经纬高,分别计算各传感器的探测精度,获得传感器优先级排序,并根据设置评估方法获得最终基准精度,将基准精度作为评估基准,计算空情融合的评估结果,并给出最终评估信息和结果;其步骤如下:
一、读取采集的传感器信息数据与航迹真值数据;当为仿真数据,则航迹真值数据为仿真产生的原始数据;当为实装传感器数据,则航迹真值数据为高精度测量数据;
二、依据协议格式,确定空间坐标数据与时间戳的对应关系,计算传感器探测精度,获得传感器优先级排序;
协议格式:用于实现数据的兼容性及处理方法统一,定义规范的输入协议格式;数据格式包括传感器数据、航迹真值数据、融合数据;
传感器数据输入格式为:航迹批号ID+参考坐标系探测数据(xData,yData,zData)+时间戳Time,其中航迹批号为定义为同一目标的ID号,参考坐标系统探测数据为针对传感器参考位置获取的传感器探测三个轴的数据,时间戳为获取某个离散数据的当取时间;
航迹真值数据有两种情况,一种是仿真获取的真值数据,另一种是通过高精度探测设备获取的目标数据,第一种情况的航迹真值的记录格式为:航迹批号ID+原始数据(B,L,H)+时间戳Time,原始数据为目标仿真数据在经度B、纬度L和高程H的数据;第二种情况的航迹真值数据格式与传感器数据格式相同;
融合数据记录格式为航迹批号ID+原始数据(B,L,H)+时间戳Time;
三、基准精度确定:确定基准精度,计算传感器器实际的探测精度,设参与融合的传感器有N个,根据传感器探测数据计算各传感器的探测精度σ
其中x
1)根据计算得到的传感器探测精度σ
2)将传感器航迹关联匹配于真值航迹;航迹关联利用空间距离的方法,取传感器航迹与真值航迹空间距离最小值为匹配原则,若计算得传感器R
D
其中,k为真值航迹的批号,取D
其中,
3)统计融合航迹与真值航迹的匹配方法同步骤2),计算出真值航迹j关联到m条融合航迹的时域区间集合为:
F
则总的融合航迹时域区间集合为:
F
设融合航迹总数为M条,则融合航迹的时间累积量为:
其中,T
4)计算各传感器的精度时间累积量T
5)得到传感器R
w
若由于计算误差导致∑w
6)根据式σ
传感器精度时间累积量计算,它是自适应权重方法的基准精度获取的一个子流程,其中的剩余融合时域
其中,m
四、评估方法:对于一个航迹的信息是由三个坐标确定的,包括经度、纬度和高程的三组数据,表示一个航迹数据,则航迹精度也会对应获得3个值,因此最终的精度包括融合精度和基准精度;最终的精度会是3个值的权衡,则有σ
1)比较法为:若融合精度大于基准精度则判断不合格,反之则为合格;
2)百分比打分法为:以最终基准精度为准,确定最终融合精度大于或小于最终基准精度的百分比,确定不同的百分比区域进行打分,当百分比等于0时为90,百分比0到10%之间为80,百分比0到-10%之间为95;
3)满意度评估法为:利用公式f=exp(-0.1054*σ
由于采用如上所述的技术方案,本发明具有如下优越性:
一种空情融合精度评估系统及方法,能对工作于仿真环境、实装环境或混合环境下的空情融合系统融合精度进行评估及鉴定。本系统适应复杂环境下,对多传感器多目标空情融合系统的精度评估,即适应仿真环境、实装环境或混合环境下的空情融合系统融合精度评估,本系统通过给定的信息输入协议,将输入数据转换为统一的输出协议,并根据设置的基准确定方法,包括精度最高法、精度最低法、平均精度法及自适应权重法,确定评估的基准精度,最终依据评估方法,包括比较法、百分比打分法、满意度评估法,给出评估结果。具有良好的适应性和可信度。
本系统在分析各传感器实际探测数据精度排序的基础上,利用参与融合的传感器探测数据在各时空域比重,计算获得基准精度,作为融合精度评估的依据。本系最终精度基准与最终融合精度的评估算法,能获得空情融合精度的评估结果。
附图说明
图1为空情融合精度评估系统结构方框图。
具体实施方式
如图1所示,一种空情融合精度评估系统,包括数据输入模块、数据处理与精度评估模块、信息显示模块,数据输入模块通过BLH数据转换连接数据处理与精度评估模块,数据处理与精度评估模块输出端连接信息显示模块;所述数据输入模块与坐标转换模块连接;数据处理与精度评估模块数据端通过精度计算模块、数据分析模块与综合评估模块相连构成回路;
所述数据输入模块为统一的信息输入格式模块,配置传感器精度优先级;所述数据处理与精度评估模块,由精度最高模块、精度最低模块、平均精度模块及自适应权重模块组成,信息显示模块用于输出并显示评估结果。
一种空情融合精度评估方法,将读取采集的传感器信息数据与航迹真值数据,若为仿真数据,则航迹真值数据为仿真产生的原始数据;若为实装传感器数据,则航迹真值数据为高精度测量数据,依据设计协议格式,确定空间坐标数据与时间戳的对应关系,计算传感器探测精度,获得传感器优先级排序,从四种基准精度计算方法中,即精度最高法、精度最低法、平均精度法及自适应权重法,来确定基准精度,采用选择的评估方法,包括比较法、专家打分法、满意度评估法来评估精度指标,并给出最终评估信息和结果。
针对多传感器航迹探测信息的时间、空间不确定而导致的融合航迹精度评估不准确的难题,通过合理衡量探测时间、探测数据测量精度等因素,定量设计出各传感器的权重精度,基于此评估融合精度的基准精度,进而客观科学地融合空情数据,通过系统多种评估方法的计算分析,确定融合系统性能及其融合问题溯源。
协议格式:为实现数据的兼容性及处理方法统一,定义规范的输入协议格式。数据格式主要有三种,即传感器数据、航迹真值数据、融合数据。
传感器数据输入格式为:航迹批号(ID)+参考坐标系探测数据(xData,yData,zData)+时间戳(Time),其中航迹批号为定义为同一目标的ID号,参考坐标系统探测数据为针对传感器参考位置获取的传感器探测三个轴的数据,时间戳为获取某个离散数据的当取时间。
航迹真值数据有两种情况,一种是仿真获取的真值数据,另一种是通过高精度探测设备获取的目标数据,第一种情况的航迹真值的记录格式为:航迹批号(ID)+原始数据(B,L,H)+时间戳(Time),原始数据为目标仿真数据在经度(B)、纬度(L)和高程(H)的数据;第二种情况的航迹真值数据格式与传感器数据格式相同。
融合数据记录格式为航迹批号(ID)+原始数据(B,L,H)+时间戳(Time)。
基准精度确定:要确定基准精度,需要计算传感器器实际的探测精度。设参与融合的传感器有N个,根据传感器探测数据计算各传感器的探测精度σ
1)根据计算得到的传感器探测精度σ
2)将传感器航迹关联匹配于真值航迹。航迹关联可利用空间距离的方法,取传感器航迹与真值航迹空间距离最小值为匹配原则,若计算得传感器R
D
其中,k为真值航迹的批号,取D
其中,
3)统计融合航迹与真值航迹的匹配方法同2),可计算出真值航迹j关联到m条融合航迹的时域区间集合为:
F
则总的融合航迹时域区间集合为:
F
设融合航迹总数为M条,则融合航迹的时间累积量为:
其中,T
4)计算各传感器的精度时间累积量T
5)可得到传感器R
w
若由于计算误差导致∑w
6)根据式σ
传感器精度时间累积量计算,它是自适应权重方法的基准精度获取的一个子流程,其中的剩余融合时域
其中,m
评估方法:对于一个航迹的信息是由三个坐标确定的,如经度、纬度和高程等三组数据表示一个航迹数据,则航迹精度也会对应获得3个值,因此最终的精度包括融合精度和基准精度;最终的精度会是3个值的权衡,则有σ
工作流程:工作流程主要为3个部分,如图所示,软件依据读取按协议存储的数据,并根据设置的传感器参考坐标将数据转换为经纬高,分别计算各传感器的精度,并根据设置评估方法获得最终基准精度,将基准精度作为评估基准,计算空情融合的评估结果,将将信息输出进行界面显示。
- 一种空情融合精度评估系统及方法
- 一种基于雷达情报仿真的空情融合性能评估系统及方法