基于图像处理的土样表面裂隙动态追踪提取装置及方法
文献发布时间:2023-06-19 10:41:48
技术领域
本发明涉及土工测试技术领域,具体为基于图像处理的土样表面裂隙动态追踪提取装置及方法。
背景技术
土体开裂问题广泛存在于实际岩土工程中。裂隙的产生会导致一些不良后果,例如裂隙的生成会促使土体内部水分的增发,加剧裂隙向土体内部发育,对其整体强度和变形特性造成较大影响。同时在降雨过程中,裂隙也为水流提供了优势流路径,加速水分入渗,进一步加剧了土体工程性质的劣化。故准确的获取土中裂隙的动态发育特征,是预防和治理诸如边坡失稳、大坝破坏、地下污染物迁移等一系列岩土工程问题的关键。
在土工室内试验中,常通过捕捉外部环境作用下小尺寸圆柱形试样表面裂隙的动态发育过程,结合相应的室内力学试验(例如三轴压缩试验、单轴压缩试验等)来研究裂隙对土体工程性质的影响,故对小尺寸圆柱形试样表面裂隙动态发育过程进行准确刻画显得十分重要。目前对于小尺寸圆柱形试样表面裂隙动态发育过程的研究还不够深入,研究人员往往通过对圆柱形试样固定位置处的照片进行定性对比或借助软尺、画笔临摹的方法手动获取其表面的裂隙分布,但上述方法在测量过程中费时费力,操作过程中试样易产生破坏,且不能及时获得裂隙的动态变化;此外直接测量的准确度还有待进一步提高,为了解决上述问题,我们提出了一种基于图像处理的土样表面裂隙动态追踪提取装置及方法。
因此,定量化提取小尺寸圆柱形试样表面裂隙的发育过程,对提高实际岩土工程中裂隙的预防和治理具有重要的意义。
发明内容
1、本发明要解决的技术问题
本发明的目的在于提供基于图像处理的土样表面裂隙动态追踪提取装置及方法,以解决上述背景技术中提出的问题:
手动测量土样表面裂隙分布的方法费时费力,操作过程中易对土样造成破坏,无法及时获取裂隙的动态变化且直接测量的准确度有待进一步提高的问题。
2、技术方案
为实现上述目的,本发明提供如下技术方案:
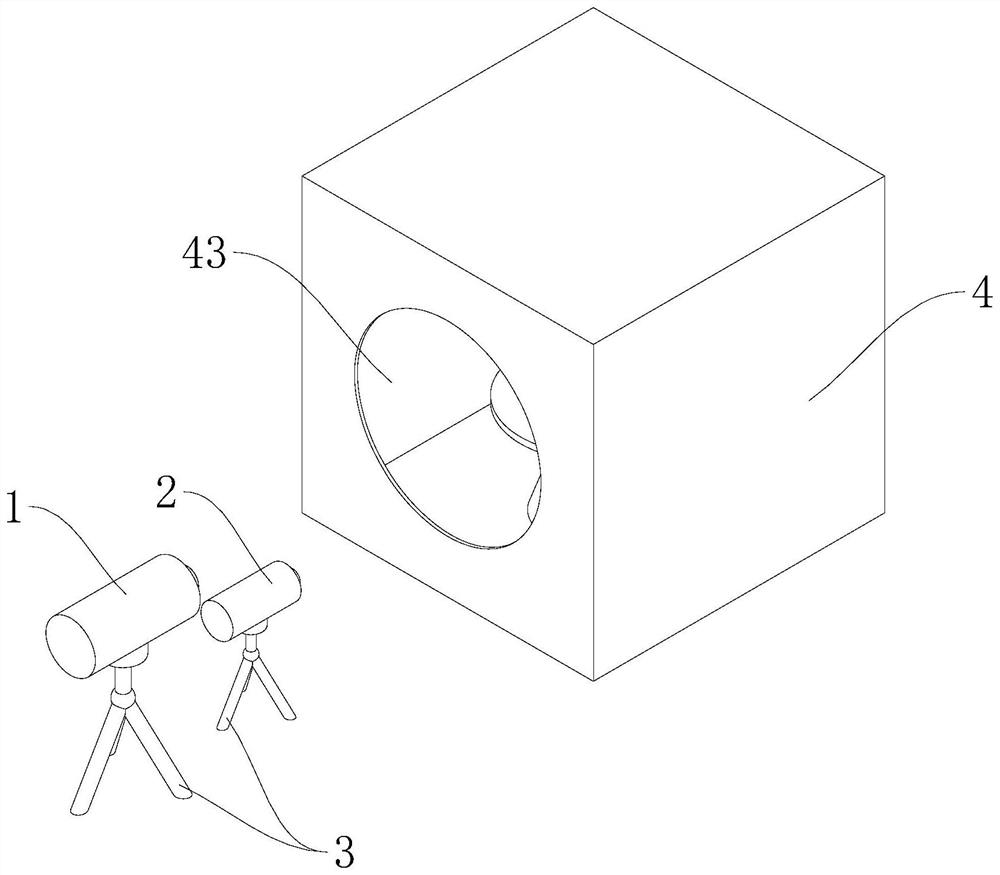
基于图像处理的土样表面裂隙动态追踪提取装置,包括有遮光箱,所述遮光箱的侧壁上设置有摄像孔,所述遮光箱的外侧依次安装有微型激光定位器和高清摄像机,所述微型激光定位器和高清摄像机的底部均固定连接有可伸缩支架,所述遮光箱的内底面的中心位置上固定安装有可变转速旋转电机,所述可变转速旋转电机的顶端固定连接有旋转平台,所述旋转平台上设置有圆柱形土样。
优选的,所述遮光箱的竖直棱边上固定连接有钢制遮光箱支架,所述钢制遮光箱支架上设置有多个安装孔,所述安装孔内插接有钢制灯光位置水平控制杆,所述钢制灯光位置水平控制杆上固定安装有LED灯源。
优选的,所述微型激光定位器和高清摄像机与圆柱形土样相匹配,所述高清摄像机的对焦位置位于圆柱形土样的中心位置;所述微型激光定位器的激光定位点位于圆柱形土样的正下方位置;所述高清摄像机的对焦位置和微型激光定位器的激光定位点位置在同一条铅垂线上。
基于图像处理的土样表面裂隙动态追踪提取方法,所述提取方法与权利要求1-3所述的基于图像处理的土样表面裂隙动态追踪提取装置相匹配,其特征在于,包括有如下步骤:
S1、将旋转平台及可变转速旋转电机位置准确设置在遮光箱的中心位置;随后将圆柱形土样安放在旋转平台正中心位置;
S2、调整钢制灯光位置水平控制杆、高清摄像机及微型激光定位器的位置,最终使得高清摄像机内的图像清晰,圆柱形土样表面无发射光且微型激光定位器的激光定位点位于圆柱形土样正下方;
S3、通过预试验调节可变转速旋转电机的转速,选择合适的旋转平台转速w
S4、按S3中所述操作方法将旋转平台调整至合适转速w
S5、将S4中采集的视频带入imageJ软件中;利用imageJ内自带的Java程序包,以微型激光定位器的激光定位点为基础,按等时间间隔t编写代码用来截取视频中对应的区域;将截取区域按时间顺序进行排列;
S6、将S5中排序后的截取区域重新导入imageJ软件中,利用公式对进行截取区域的水平距离进行换算,并对所有截取区域按时间顺序进行拼接处理;
S7、对拼接后的截取区域图片进行二值化处理,提取试验土样对应的侧面完整裂隙。
优选的,所述S3中所选择的转速w
优选的,所述S3中所确定的视频的截取时间间隔Δt要尽可能的小,对土样的侧面视频按时间间隔t进行截取后需确保最后一次截取图片的完整。
优选的,所述S6中所提到的计算截取区域的水平距离的公式为:
Δx=r·ω
式中,r表示圆柱形土样的半径,w
3、有益效果
(1)本发明所提出的基于图像处理的土样表面裂隙动态追踪提取装置在使用时,首先将采集的圆柱形土样放置在不透光的遮光罩内部,通过可变转速旋转电机和旋转平台带动圆柱形土样进行匀速旋转,并且通过钢制灯光位置水平控制杆上的LED灯源来对旋转平台上的圆柱形土样进行照明,实际操作过程中,通过调整钢制灯光位置水平控制杆高度来控制光源强度,同时通过遮光罩外侧安装的高清摄像头和微型激光定位器来对圆柱形土样侧面裂隙形状以及位置变化等数据进行记录和测量,同时结合本发明所提出的基于图像处理的土样表面裂隙动态追踪提取方法中的具体操作方法及计算方式,相较于现有的手工测量的方法,更加省时省力,也更为准确,同时还能够方便快捷的提取到圆柱形土样表面裂隙的发育过程。
(2)本发明提出的基于图像处理的土样表面裂隙动态追踪提取方法与基于图像处理的土样表面裂隙动态追踪提取装置相匹配,本发明中提取圆柱形土样侧面裂隙过程采用了等效近似的方法,即将出初始曲面按等时间间隔t近似分割成多个平面,后按平面裂隙对初始的曲面裂隙进行近似提取,通过上述操作方法,大大简化了小尺寸圆柱形试样表面裂隙动态发育过程的刻画工作,实现了定量化提取小尺寸圆柱形试样表面裂隙的发育过程的功能,有效解决了手动测量土样表面裂隙分布的方法费时费力,操作过程中易对土样造成破坏,无法及时获取裂隙的动态变化且直接测量的准确度有待进一步提高的问题,对提高实际岩土工程中裂隙的预防和治理具有重要的意义。
附图说明
图1为本发明提出的基于图像处理的土样表面裂隙动态追踪提取装置的结构示意图;
图2为本发明提出的基于图像处理的土样表面裂隙动态追踪提取装置的结构透视图;
图3为本发明提出的基于图像处理的土样表面裂隙动态追踪提取方法的方法流程示意图;
图4为本发明提出的基于图像处理的土样表面裂隙动态追踪提取方法的实施例2中激光定位点位置示意图;
图5为本发明提出的基于图像处理的土样表面裂隙动态追踪提取装置及方法的实施例2中截取区域随时间变化示意图。
图中标号说明:
1、高清摄像机;2、微型激光定位器;3、可伸缩支架;4、遮光箱;41、钢制灯光位置水平控制杆;42、LED灯源;43、摄像孔;44、钢制遮光箱支架;45、安装孔;5、旋转平台;6、可变转速旋转电机;7、圆柱形土样。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1:
请参阅图1-2,基于图像处理的土样表面裂隙动态追踪提取装置,包括有遮光箱4,遮光箱4的侧壁上设置有摄像孔43,遮光箱4的外侧依次安装有微型激光定位器2和高清摄像机1,微型激光定位器2和高清摄像机1的底部均固定连接有可伸缩支架3,遮光箱4的内底面的中心位置上固定安装有可变转速旋转电机6,可变转速旋转电机6的顶端固定连接有旋转平台5,旋转平台5上设置有圆柱形土样7。
遮光箱4的竖直棱边上固定连接有钢制遮光箱支架44,钢制遮光箱支架44上设置有多个安装孔45,安装孔45内插接有钢制灯光位置水平控制杆41,钢制灯光位置水平控制杆41上固定安装有LED灯源42。
微型激光定位器2和高清摄像机1与圆柱形土样7相匹配,高清摄像机1的对焦位置位于圆柱形土样7的中心位置;微型激光定位器2的激光定位点位于圆柱形土样7的正下方位置;高清摄像机1的对焦位置和微型激光定位器2的激光定位点位置在同一条铅垂线上。
本发明所提出的基于图像处理的土样表面裂隙动态追踪提取装置在使用时,首先将采集的圆柱形土样7放置在不透光的遮光罩内部,通过可变转速旋转电机6和旋转平台5带动圆柱形土样7进行匀速旋转,并且通过钢制灯光位置水平控制杆41上的LED灯源42来对旋转平台5上的圆柱形土样7进行照明,实际操作过程中,通过调整钢制灯光位置水平控制杆41高度来控制光源强度,同时通过遮光罩外侧安装的高清摄像头和微型激光定位器2来对圆柱形土样7侧面裂隙形状以及位置变化等数据进行记录和测量,同时结合本发明所提出的基于图像处理的土样表面裂隙动态追踪提取方法中的具体操作方法及计算方式,相较于现有的手工测量的方法,更加省时省力,也更为准确,同时还能够方便快捷的提取到圆柱形土样7表面裂隙的发育过程。
实施例2:
请参阅图3-5,结合实施例1的基础有所不同之处在于,
基于图像处理的土样表面裂隙动态追踪提取方法,提取方法与权利要求1-3基于图像处理的土样表面裂隙动态追踪提取装置相匹配,包括有如下步骤:
S1、将旋转平台5及可变转速旋转电机6位置准确设置在遮光箱4的中心位置;随后将圆柱形土样7安放在旋转平台5正中心位置;
S2、调整钢制灯光位置水平控制杆41、高清摄像机1及微型激光定位器2的位置,最终使得高清摄像机1内的图像清晰,圆柱形土样7表面无发射光且微型激光定位器2的激光定位点位于圆柱形土样7正下方;
S3、通过预试验调节可变转速旋转电机6的转速,选择合适的旋转平台5转速w
S4、按S3中操作方法将旋转平台5调整至合适转速w
S5、将S4中采集的视频带入imageJ软件中;利用imageJ内自带的Java程序包,以微型激光定位器2的激光定位点为基础(见图4),按等时间间隔t编写代码用来截取视频中对应的区域;将截取区域按时间顺序进行排列;
S6、将S5中排序后的截取区域重新导入imageJ软件中,利用公式对进行截取区域的水平距离进行换算,并对所有截取区域按时间顺序进行拼接处理(见图5);
S7、对拼接后的截取区域图片进行二值化处理,提取试验土样对应的侧面完整裂隙。
S3中所选择的转速w
S3中所确定的视频的截取时间间隔Δt要尽可能的小,对土样的侧面视频按时间间隔t进行截取后需确保最后一次截取图片的完整。S6中所提到的计算截取区域的水平距离的公式为:
Δx=r·ω
式中,r表示圆柱形土样7的半径,w
本发明提出的基于图像处理的土样表面裂隙动态追踪提取方法与基于图像处理的土样表面裂隙动态追踪提取装置相匹配,本发明中提取圆柱形土样7侧面裂隙过程采用了等效近似的方法,即将出初始曲面按等时间间隔t近似分割成多个平面,后按平面裂隙对初始的曲面裂隙进行近似提取,通过上述操作方法,大大简化了小尺寸圆柱形试样表面裂隙动态发育过程的刻画工作,实现了定量化提取小尺寸圆柱形试样表面裂隙的发育过程的功能,有效解决了手动测量土样表面裂隙分布的方法费时费力,操作过程中易对土样造成破坏,无法及时获取裂隙的动态变化且直接测量的准确度有待进一步提高的问题,对提高实际岩土工程中裂隙的预防和治理具有重要的意义。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其改进构思加以等同替换或改变,都应涵盖在本发明的保护范围内。
- 基于图像处理的土样表面裂隙动态追踪提取装置及方法
- 一种提取土壤表面裂隙孔隙的装置及方法