一种基于机器视觉的现场巡视质量无感检测方法
文献发布时间:2023-06-19 10:44:55
技术领域
本发明涉及计量自动化技术领域,具体涉及一种基于机器视觉的现场巡视质量无感检测方法。
背景技术
在我国,电能已成为人类社会赖以生存和发展必不可缺少的一种重要能源,人类的所有活动几乎都与电有密切的关系。计量器具做为电能计量的关键设备,如何保证其校验的准确、高效,努力提高计量器具的校验效率,就成为摆在各级计量检测部门亟需解决的问题。
对计量用自动化检定检测系统开展常态化定期巡检是保证检定系统、测试设备、电能计量装置准确可靠的有效途径之一。定点签到或定点打卡等传统巡检方式一方面在巡检效果方面很大程度上取决于巡检人员责任心;另一方面缺乏必要的现场安全管控能力。针对传统巡检方式存在的问题,引入一种基于机器视觉的现场巡视质量无感检测方法已成为大趋势。基于机器视觉的作业现场定期巡视质量无感检测方法借助于生产现场已有摄像装置,在实现巡检工作的无感检测同时,可对巡检过程中可能出现的安全隐患进行及时提醒,消除潜在危险,并对巡检质量进行客观评价。
发明内容
本发明所要解决的技术问题是传统定点签到或定点操作存在只走不看或只看不修的技术问题,目的在于提供一种基于机器视觉的现场巡视质量无感检测方法,借助现有摄像设备及控制系统,全程无感参与。
本发明通过下述技术方案实现:
1.一种基于机器视觉的现场巡视质量无感检测方法,包括以下步骤:
S1:摄像装置采集监控区域静态图像,将采集到的监控区域静态图像发送至系统中,系统得到多张监控区域静态图像数据;
S2:系统对得到多张监控区域静态图像数据同时进行巡视区域操作和巡视点位标注操作,得到构建后的巡视路线及巡视点位;巡视区域是指巡视人员在开展巡视过程中必须开展巡视工作的区域;巡视点位是指巡视人员在开展巡视过程中必须开展巡视工作的设备或装置;
S3:摄像装置对监控区域进行第一次连续采集图像操作,将第一次采集到的监控区域图像发送至系统中,系统得到第一次采集的多张监控区域图像;连续采集是指以特定频率读取摄像装置图像数据;特定频率可以手动指定,也可自动设置;
S4:系统对第一次采集得到的多张监控区域图像进行“是否有人”判断,如果系统判断出“有人”,进行下一步骤S5,如果系统判断“没人”,则返回上一步骤S3;
S5:系统判断出第一次监控区域图像中“有人”后,进行开始计时操作,同时设定计时时间为T1;
S6:系统对监控区域“有人”的图像进行巡视人员实时定位后,储存巡视人员的坐标信息和每个定位点的定留时间形成的轨迹图;所述实时定位,形成巡视人员巡视轨迹图方法基本原理是通过包括利用YOLO、卷积神经网络等方法对目标区域人员进行实时采集,并获取人员坐标信息,其次通过SORT、DEEPSORT、卡尔曼滤波、匈牙利算法技术对人员行动轨迹进行实时跟踪、预测,并最终形成巡视轨迹图。
S7:摄像装置对监控区域进行第二次连续采集图像操作,将第二次采集到的监控区域图像发送至系统中,系统得到第二次采集的多张监控区域图像;
S8:系统对第二次采集得到的多张监控区域图像进行“是否有人”判断,如果系统判断出“没人”,进行下一步骤S9,如果系统判断“有人”,则返回步骤S6;
S9:系统判断出第二次监控区域图像中“没人”后,进行结束计时操作,同时设定计时时间为T2;
S10:系统对采集的时间TI和T2进行减法操作,减法操作的结果跟系统预设值相对比,如果结果大于预设值则进行下一步S11,如果结果小于预设值,则返回步骤3;
S11:系统对巡视人员巡视轨迹图进行分析,计算各巡视点位停留时间、实际巡视轨迹图和系统预设的巡视路线的耦合程度,对得到的巡视质量结果进行评价。
进一步,所述标注操作具体指对通过摄像装置获得的现场区域静态图表进行巡视区域、巡视路线和巡视点位的指定,并获取对应巡视区域、巡视路线和巡视点位的坐标数据集。
进一步,所述标注方法为矩形标注、圆形标注和不规则曲线标注。
进一步,所述计算巡视点位停留时间的方法为巡视人员轨迹与巡视点位坐标出现重叠的时间累计值。
进一步,所述实际巡视轨迹图与要求巡视路线的耦合程度计算方法为:
(a)t
(b)t
(c)耦合程度:
进一步,所述巡视质量评价方法为:当巡视点位停留时间或耦合程度大于设定阈值的1.2倍时,判定为优秀;小于设定阈值的1.2倍,但大于设定阈值的0.9倍时,判定为良好;小于设定阈值的0.9倍,但大于设定阈值的0.8倍时,判定为普通;小于设定阈值的0.8倍时,判定为不合格。
本发明与现有技术相比,具有如下的优点和有益效果:
本发明一种一种基于机器视觉的现场巡视质量无感检测方法,该方法相主要优势在于以下几个方面:
一是巡视过程,巡视人员无需定点签到、定点打卡,全程无感参与;
二是可借助于生产现场已有摄像装置及控制系统,无需额外安装打卡装置,结构简单,成本低;
三是可对巡视人员在各关键点位的巡视时间进行自动统计,对巡检质量进行客观评价,进一步提升巡视质量,有效避免“只走不看”、“只看不修”等情况;
四是对巡视过程进行全记录,可实现巡视取证、危险点预警告警等辅助功能。
附图说明
此处所说明的附图用来提供对本发明实施例的进一步理解,构成本申请的一部分,并不构成对本发明实施例的限定。在附图中:
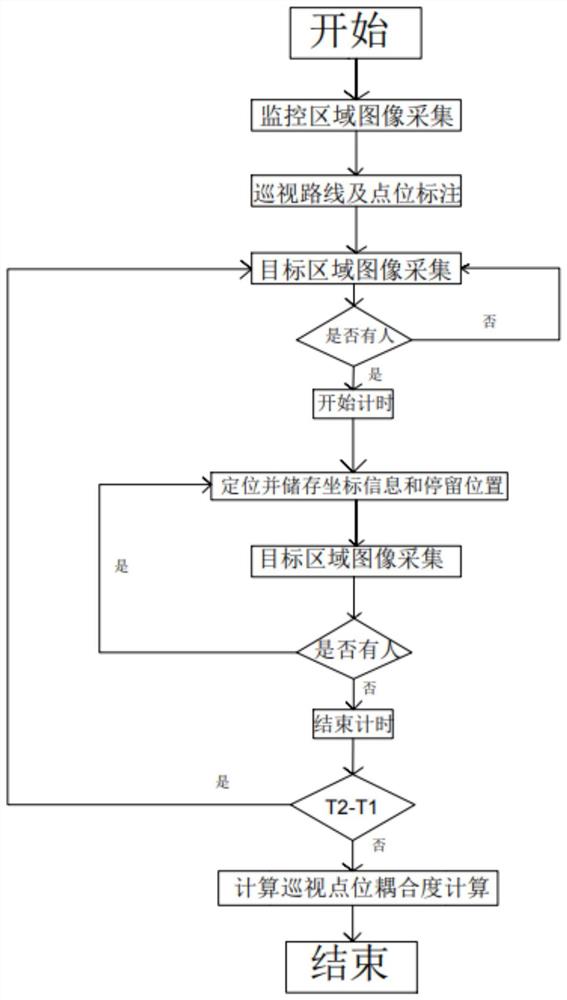
图1是本发明检测方法流程图;
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
在以下描述中,为了提供对本发明的透彻理解阐述了大量特定细节。然而,对于本领域普通技术人员显而易见的是:不必采用这些特定细节来实行本发明。在其他实例中,为了避免混淆本发明,未具体描述公知的结构、电路、材料或方法。
在整个说明书中,对“一个实施例”、“实施例”、“一个示例”或“示例”的提及意味着:结合该实施例或示例描述的特定特征、结构或特性被包含在本发明至少一个实施例中。因此,在整个说明书的各个地方出现的短语“一个实施例”、“实施例”、“一个示例”或“示例”不一定都指同一实施例或示例。此外,可以以任何适当的组合和、或子组合将特定的特征、结构或特性组合在一个或多个实施例或示例中。此外,本领域普通技术人员应当理解,在此提供的示图都是为了说明的目的,并且示图不一定是按比例绘制的。这里使用的术语“和/或”包括一个或多个相关列出的项目的任何和所有组合。
在本发明的描述中,需要理解的是,术语“前”、“后”、“左”、“右”、“上”、“下”、“竖直”、“水平”、“高”、“低”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制。
实施例
如图1所示,一种基于机器视觉的现场巡视质量无感检测方法,巡视人员无需定点签到、定点打卡,全程无感参与,可借助于生产现场已有摄像装置及控制系统,无需额外安装打卡装置,结构简单,成本低;可对巡视人员在各关键点位的巡视时间进行自动统计,对巡检质量进行客观评价,进一步提升巡视质量,有效避免“只走不看”、“只看不修”等情况;对巡视过程进行全记录,可实现巡视取证、危险点预警告警等辅助功能;包括以下步骤:
S1:摄像装置采集监控区域静态图像,将采集到的监控区域静态图像发送至系统中,系统得到多张监控区域静态图像数据;
所述摄像装置对现场区域进行拍照包括:一个摄像装置对多个区域进行拍照、一个摄像装置对一个区域进行拍照。
S2:系统对得到多张监控区域静态图像数据同时进行巡视区域操作和巡视点位标注操作,得到构建后的巡视路线及巡视点位;巡视区域是指巡视人员在开展巡视过程中必须开展巡视工作的区域;巡视点位是指巡视人员在开展巡视过程中必须开展巡视工作的设备或装置;
S3:摄像装置对监控区域进行第一次连续采集图像操作,将第一次采集到的监控区域图像发送至系统中,系统得到第一次采集的多张监控区域图像;连续采集是指以特定频率读取摄像装置图像数据;特定频率可以手动指定,也可自动设置;
S4:系统对第一次采集得到的多张监控区域图像进行“是否有人”判断,如果系统判断出“有人”,进行下一步骤S5,如果系统判断“没人”,则返回上一步骤S3;
S5:系统判断出第一次监控区域图像中“有人”后,进行开始计时操作,同时设定计时时间为T1;
S6:系统对监控区域“有人”的图像进行巡视人员实时定位后,储存巡视人员的坐标信息和每个定位点的定留时间形成的轨迹图;所述实时定位,形成巡视人员巡视轨迹图方法基本原理是通过包括利用YOLO、卷积神经网络等方法对目标区域人员进行实时采集,并获取人员坐标信息,其次通过SORT、DEEPSORT、卡尔曼滤波、匈牙利算法技术对人员行动轨迹进行实时跟踪、预测,并最终形成巡视轨迹图。
S7:摄像装置对监控区域进行第二次连续采集图像操作,将第二次采集到的监控区域图像发送至系统中,系统得到第二次采集的多张监控区域图像;
S8:系统对第二次采集得到的多张监控区域图像进行“是否有人”判断,如果系统判断出“没人”,进行下一步骤S9,如果系统判断“有人”,则返回步骤S6;
S9:系统判断出第二次监控区域图像中“没人”后,进行结束计时操作,同时设定计时时间为T2;
S10:系统对采集的时间TI和T2进行减法操作,减法操作的结果跟系统预设值相对比,如果结果大于预设值则进行下一步S11,如果结果小于预设值,则返回步骤3;
S11:系统对巡视人员巡视轨迹图进行分析,计算各巡视点位停留时间、实际巡视轨迹图和系统预设的巡视路线的耦合程度,对得到的巡视质量结果进行评价。
进一步,所述标注操作具体指对通过摄像装置获得的现场区域静态图表进行巡视区域、巡视路线和巡视点位的指定,并获取对应巡视区域、巡视路线和巡视点位的坐标数据集。
进一步,所述标注方法为矩形标注、圆形标注和不规则曲线标注。
进一步,所述计算巡视点位停留时间的方法为巡视人员轨迹与巡视点位坐标出现重叠的时间累计值。
进一步,所述实际巡视轨迹图与要求巡视路线的耦合程度计算方法为:
(a)t
(b)t
(c)耦合程度:
进一步,所述巡视质量评价方法为:当巡视点位停留时间或耦合程度大于设定阈值的1.2倍时,判定为优秀;小于设定阈值的1.2倍,但大于设定阈值的0.9倍时,判定为良好;小于设定阈值的0.9倍,但大于设定阈值的0.8倍时,判定为普通;小于设定阈值的0.8倍时,判定为不合格;所述阈值及0.8、0.9、1.2等系数可根据实际情况进行调整或设置。
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种基于机器视觉的现场巡视质量无感检测方法
- 基于机器视觉和图像识别的无塔尺交通事故现场测量方法