一种白萝卜切条装置
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及一种切条装置,尤其涉及一种白萝卜切条装置。
背景技术
腌萝卜是一种我们日常生活中比较常见的风味小菜,人们首先将白萝卜进行切条,再加以水、醋、盐、白糖和辣椒油等调料进行腌制,其口感酸甜脆爽,广受人们喜爱。
现有的白萝卜切条的方法,一般是人工对白萝卜进行逐一切条,人们首先用手将白萝卜进行固定,再使用刀具对白萝卜进行逐一切条,随后人们再将已切条的萝卜进行收集,当刀具上油萝卜碎屑残留时,人们还需及时对刀具进行清理,这种萝卜切条方法操作步骤繁琐,白萝卜切条的工作效率低下。
因此需要研发一种能够实现自动转动白萝卜、对白萝卜进行自动切条并便于人们对刀片上残留的碎屑进行清理的白萝卜切条装置,从而解决现有白萝卜切条方法存在的需要人工固定白萝卜、手动对白萝卜进行切条并需要人们手动清理刀具的问题。
发明内容
为了克服现有白萝卜切条方法存在的需要人工固定白萝卜、手动对白萝卜进行切条并需要人们手动清理刀具的缺点,要解决的技术问题:提供一种能够实现自动转动白萝卜、对白萝卜进行自动切条并便于人们对刀片上残留的碎屑进行清理的白萝卜切条装置。
技术方案:一种白萝卜切条装置,包括有:底板和伺服电机,底板顶部左侧设有伺服电机;升降机构,底板顶部中间设有升降机构,升降机构与伺服电机的输出轴相连;支撑柱,底板顶部右侧均匀设有支撑柱;旋转机构,支撑柱顶部之间连接有旋转机构,旋转机构的部件与升降机构的部件相连。
在其中一个实施例中,升降机构包括有:固定座,底板顶部中间设有固定座;固定块,固定座靠近伺服电机的一侧设有固定块;凹圆柱,固定块内转动式连接有凹圆柱;齿轮组,凹圆柱底部和伺服电机输出轴之间连接有齿轮组;固定滑套,固定座靠近固定块的一侧设有固定滑套;阻挡块,固定滑套右部上侧设有阻挡块;升降轴,固定滑套内滑动式连接有升降轴,升降轴与凹圆柱滑动式相连;弹簧,升降轴与固定滑套之间连接有弹簧,弹簧套在升降轴上;滑轨,固定座顶部两侧均设有滑轨;刀具座,滑轨内滑动式连接有刀具座,升降轴穿过固定滑套与刀具座相连;刀片,刀具座内设有用于对白萝卜进行切条的刀片;转轴,伺服电机的输出轴连接有转轴,转轴穿过固定座。
在其中一个实施例中,旋转机构包括有:缺齿轮,转轴远离伺服电机的一侧设有缺齿轮;轴承座,固定座靠近缺齿轮的一侧设有轴承座;转杆,轴承座内转动式连接有转杆;锥齿轮,转杆靠近缺齿轮的一侧设有锥齿轮,锥齿轮与缺齿轮相啮合;第一限位环,外侧支撑柱顶部之间连接有第一限位环;第二限位环,内侧支撑柱顶部之间连接有第二限位环;放置架,转杆顶部周向均匀设有放置架,放置架与第一限位环和第二限位环均滑动式相连;限位杆,放置架内壁均对称设有限位杆;挂杆,限位杆之间均滑动式连接有可拆卸的挂杆。
在其中一个实施例中,还包括有:凸起,固定座顶部中间设有凸起,凸起穿过刀具座和刀片,凸起与刀具座和刀片相配合;刷子,放置架底部周向均匀设有刷子,刷子与凸起相配合。
在其中一个实施例中,还包括有:落料导轨,底板顶部远离伺服电机的一侧设有落料导轨,落料导轨与第一限位环、第二限位环和限位杆相配合,落料导轨可与挂杆滑动式相连。
本发明的有益效果是:1、本发明达到了自动转动白萝卜、自动对白萝卜进行切条、自动清理刀片上残留的白萝卜渣并且能够自动对白萝卜进行落料的效果。
2、在伺服电机、升降机构、旋转机构和落料导轨的配合下,可以实现间歇性转动白萝卜、对白萝卜进行自动切条并自动进行落料的效果。
3、在凸起和刷子的配合下,可以实现自动清理刀片上残留的白萝卜碎屑。
附图说明
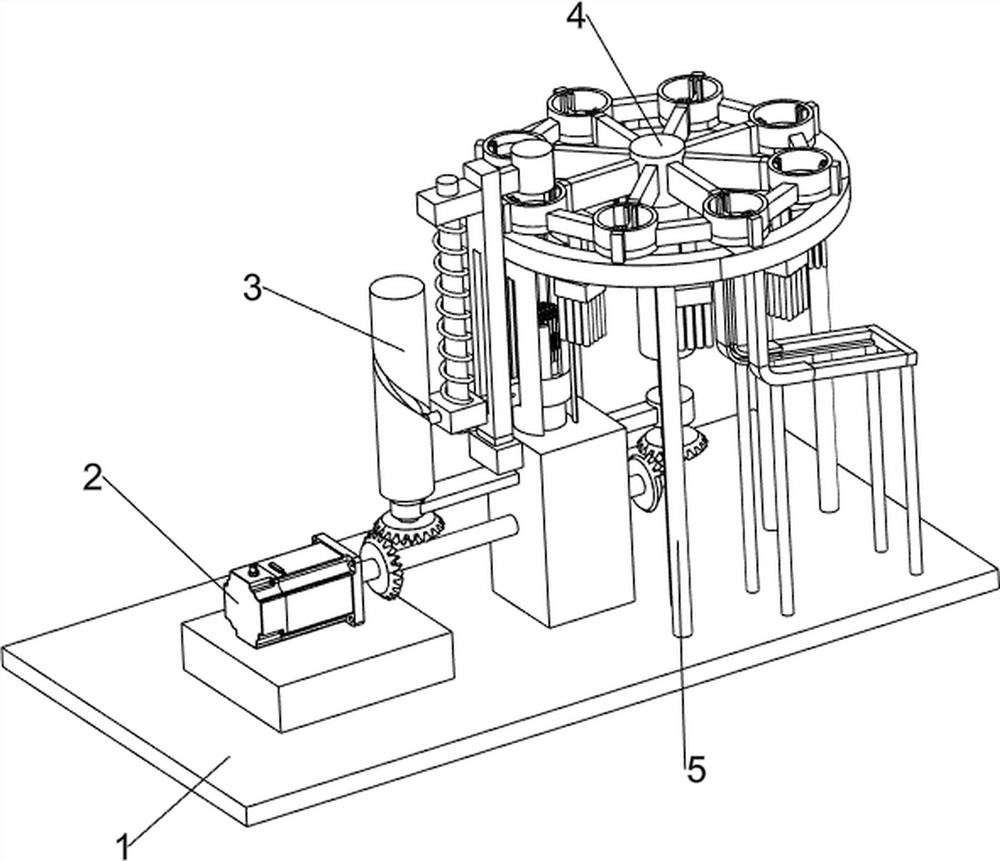
图1为本发明的立体结构示意图。
图2为本发明升降机构的立体结构示意图。
图3为本发明升降机构的部分立体结构示意图。
图4为本发明旋转机构的立体结构示意图。
图5为本发明旋转机构的部分立体结构示意图。
图6为本发明的部分立体结构示意图。
图中标号名称:1-底板,2-伺服电机,3-升降机构,31-凹圆柱,32-升降轴,33-固定滑套,34-阻挡块,35-固定块,36-齿轮组,37-转轴,38-固定座,39-刀片,310-刀具座,311-滑轨,312-弹簧,4-旋转机构,41-放置架,42-转杆,43-第一限位环,44-挂杆,45-锥齿轮,46-缺齿轮,47-轴承座,48-第二限位环,49-限位杆,5-支撑柱,6-凸起,7-刷子,8-落料导轨。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
一种白萝卜切条装置,如图1所示,包括有底板1、伺服电机2、升降机构3、旋转机构4和支撑柱5,底板1顶部左侧设有伺服电机2,底板1顶部中间设有升降机构3,升降机构3与伺服电机2的输出轴相连,底板1顶部右侧均匀设有支撑柱5,支撑柱5顶部之间连接有旋转机构4,旋转机构4的部件与升降机构3的部件相连。
当人们需要对白萝卜进行切条时,人们首先将白萝卜串在旋转机构4的部件上,随后人们启动伺服电机2,伺服电机2的输出轴转动带动升降机构3的部件转动,升降机构3的部件转动带动旋转机构4的部件转动,同时升降机构3的部件不断上下移动,旋转机构4的部件转动带动白萝卜转动,白萝卜转动到升降机构3的部件处,升降机构3的部件向上移动对白萝卜进行切条,随后旋转机构4的部件继续转动,人们即可将已完成切条的白萝卜取出,当人们不需要再对白萝卜进行切条时,人们关闭伺服电机2,使得整个装置停止运作。
实施例2
在实施例1的基础之上,如图2-5所示,升降机构3包括有凹圆柱31、升降轴32、固定滑套33、阻挡块34、固定块35、齿轮组36、转轴37、固定座38、刀片39、刀具座310、滑轨311和弹簧312,底板1顶部中间设有固定座38,固定座38左部上侧设有固定块35,固定块35内转动式连接有凹圆柱31,凹圆柱31底部和伺服电机2输出轴之间连接有齿轮组36,固定座38左部上侧设有固定滑套33,固定滑套33位于固定块35上侧,固定滑套33右部上侧设有阻挡块34,固定滑套33内滑动式连接有升降轴32,升降轴32与凹圆柱31滑动式相连,升降轴32下侧与固定滑套33上侧之间连接有弹簧312,弹簧312套在升降轴32上,固定座38顶部左右两侧均设有滑轨311,滑轨311内滑动式连接有刀具座310,升降轴32右部穿过固定滑套33与刀具座310相连,刀具座310内设有刀片39,伺服电机2的输出轴连接有转轴37,转轴37穿过固定座38。
当人们需要对白萝卜进行切条时,在伺服电机2和旋转机构4的配合下,白萝卜转动到阻挡块34下方,伺服电机2的输出轴转动带动齿轮组36转动,齿轮组36转动带动凹圆柱31转动,凹圆柱31转动带动升降轴32向上移动,弹簧312被压缩,升降轴32向上移动带动刀具座310向上移动,刀具座310向上移动带动刀片39向上移动,刀片39向上移动对萝卜进行切条,当升降轴32向上移动到凹圆柱31上侧时,弹簧312复位带动升降轴32向下移动复位,升降轴32向下移动复位带动刀具座310向下移动复位,刀具座310向下移动复位带动刀片39向下移动复位,刀片39和刀具座310与白萝卜分离,人们即可收取已完成切条的白萝卜。
旋转机构4包括有放置架41、转杆42、第一限位环43、挂杆44、锥齿轮45、缺齿轮46、轴承座47、第二限位环48和限位杆49,转轴37右部设有缺齿轮46,固定座38右部上侧设有轴承座47,轴承座47内转动式连接有转杆42,转杆42底部设有锥齿轮45,锥齿轮45与缺齿轮46相啮合,外侧支撑柱5顶部之间连接有第一限位环43,内侧支撑柱5顶部之间连接有第二限位环48,转杆42顶部周向均匀设有放置架41,放置架41与第一限位环43和第二限位环48均滑动式相连,放置架41内壁均对称设有限位杆49,限位杆49之间均滑动式连接有可拆卸的挂杆44。
当人们需要转动白萝卜时,人们首先将白萝卜串在挂杆44上,再将挂杆44放置在限位杆49之间,挂杆44与第一限位环43和第二限位环48相配合,使得萝卜被挂在放置架41之间,在伺服电机2和升降机构3的配合下,伺服电机2的输出轴转动带动转轴37转动,转轴37转动带动缺齿轮46转动,当缺齿轮46转动到有齿部分与锥齿轮45相啮合时,缺齿轮46转动带动锥齿轮45转动,锥齿轮45转动带动转杆42转动,转杆42转动带动放置架41转动,放置架41转动带动挂杆44和限位杆49转动,挂杆44转动带动白萝卜转动,当缺齿轮46转动到有齿部分与锥齿轮45脱离啮合时,锥齿轮45、转杆42、放置架41、挂杆44和限位杆49停止转动,白萝卜停止转动,由此即可实现间歇性将白萝卜进行转动。
实施例3
在实施例2的基础之上,如图6所示,还包括有凸起6和刷子7,固定座38顶部中间设有凸起6,凸起6穿过刀具座310和刀片39,凸起6与刀具座310和刀片39相配合,放置架41底部周向均匀设有刷子7,刷子7与凸起6相配合。
当人们需要将刀片39上残留萝卜条进行清理时,在伺服电机2、升降机构3和旋转机构4的配合下,白萝卜完成切条后,刀片39和刀具座310向下移动复位,刀片39上残留的萝卜条被留在凸起6顶部,放置架41转动带动刷子7转动,刷子7转动与凸起6相配合,刷子7将凸起6顶部的萝卜条进行清理,由此即可实现将刀片39上残留萝卜条进行清理。
还包括有落料导轨8,底板1顶部右前侧设有落料导轨8,落料导轨8与第一限位环43、第二限位环48和限位杆49相配合,落料导轨8可与挂杆44滑动式相连。
当人们需要对已完成切条的白萝卜进行下料时,在伺服电机2、升降机构3和旋转机构4的配合下,白萝卜完成切条,放置架41继续转动带动挂杆44和限位杆49转动,当挂杆44转动到与第一限位环43和第二限位环48脱离配合时,挂杆44向下滑落至落料导轨8之间,挂杆44向下滑落带动已完成切条的白萝卜向下滑落,人们即可收集已完成切条的白萝卜。
以上对本申请进行了详细介绍,本文中应用了具体个例对本申请的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本申请的方法及其核心思想;同时,对于本领域的一般技术人员,依据本申请的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本申请的限制。
- 一种白萝卜切条装置
- 一种应力小、良率高的黄桃切条装置及其切条方法