一种滚轮式多级阻尼簧管无人机防摔装置
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及无人机技术领域,具体为一种滚轮式多级阻尼簧管无人机防摔装置。
背景技术
固定翼无人机由于其速度快、载重量大、飞行高度高等优点,被广泛用于航拍、高空侦察、交通管理等领域以及地质勘探、测绘、石油、农林等行业,都具有广阔的应用前景。
但固定翼无人机由于降落时速度较快,对降落场地的要求十分严格,针对有一定坡度的地面,固定翼无人机在降落时往往会将全部载荷作用于前端或后端的降落支架上,过大的载荷容易导致降落支架结构遭到破坏,从而造成无人机的摔毁。另一方面传统的固定翼无人机的降落减震装置多采用单级阻尼弹簧,这种减震方式对降落瞬间的冲击力的吸收效果并不好,且后续单级阻尼弹簧通过反复震动卸除能量时对机身的稳定性影响较大。
传统的固定翼无人机滚轮的刹车装置在长期使用后会出现磨损,刹车的效果会受到影响,并且传统的刹车系统不会根据滚轮的转速来调整刹车力矩,这种刹车方式不利于无人机降落时的稳定性。
发明内容
本发明的目的在于提供一种滚轮式多级阻尼簧管无人机防摔装置,以解决上述背景技术中提出的问题。
为了解决上述技术问题,本发明提供如下技术方案:一种滚轮式多级阻尼簧管无人机防摔装置,包括机身、机翼、平衡组件、安装支架、支撑腿组件、滚轮组件,所述机翼安装在机身两侧,所述安装支架和机身紧固连接,所述机翼从安装支架中穿过,安装支架有两组,两组安装支架分别位于机身两侧,所述平衡组件有两组,两组平衡组件分别从两组安装支架中穿过,平衡组件上部和安装支架紧固连接,平衡组件下端从机翼两侧垂下,所述两个支撑腿组件上端分别和一组平衡组件下端的两侧相连,支撑腿组件下端和滚轮组件上端紧固连接。当无人机降落时,平衡组件可以根据地面的坡度对支撑腿组件的长度进行调整,保证无人机的两组支撑腿组件都可以均匀的分摊载荷,最大程度的保持了机身结构的稳定性,支撑腿组件采用多级阻尼簧管结构,在无人机落地的瞬间,可以通过多级簧管的压缩将下落的冲击力最大程度的吸收,滚轮组件通过电磁力矩对轮毂进行制动,并且通过制动时产生的脉冲电流制造脉冲磁场,通过磁场力带动第一刹车盘进行点刹,随着轮毂转速的降低,产生的磁场力也随之降低,第一刹车盘提供的刹车力矩也会随之减小,通过可自行调整的刹车力矩可以使得整个刹车过程更加稳定。
进一步的,所述平衡组件包括U形管、活塞板、内滑套、外滑套、活塞杆、复位弹簧、通气固定块、调节阀,所述U形管安装在安装支架内部,U形管的两侧竖直管道分别位于机翼两侧竖直向下,所述固定通气块位于U形管内部竖直管道部分的最上端,所述复位弹簧一端和固定通气块紧固连接,复位弹簧另一端和活塞板紧固连接,所述活塞板和U形管密封连接,所述活塞杆一端和活塞板紧固连接,活塞杆远离活塞板的一端和内滑套紧固连接,所述内滑套远离活塞杆的一端和支撑腿组件紧固连接,所述外滑套外侧和U形管内壁紧固连接,外滑套内侧和内滑套通过滚珠滑动连接,所述调节阀位于U形管中间位置。当无人机降落的地面具有一定倾斜角度时,前后滚轮会出现受力不均匀的情况,当载荷主要作用在某一组支撑腿组件上时,可能造成支撑腿组件的结构破坏,从而导致无人机降落时摔坏。本发明的平衡组件针对这一问题提供了解决方法,当无人机降落在倾斜地面上时,U形管一侧的支撑腿组件先受力,支撑腿组件带动内滑套上移,内滑套通过活塞杆带动活塞板上移,复位弹簧被压缩,U形管中的空气推动另一侧竖直管道中的活塞板下移,另一侧的复位弹簧被拉伸,另一侧的支撑腿组件随之下移,当另一侧的支撑腿组件也和地面接触时,两组支撑腿组件共同支撑无人机,无人机机身依然能保持水平状态,无人机的重力平分在两组支撑腿组件上,两侧的活塞板都被向上推动,U形管内部的气体压强增大,当压强增到到一定强度时,调节阀闭合,U形管两侧的气流不在互通,支撑腿组件保持在不同高度的状态下,保证无人机在倾斜的道路上以水平的姿态平稳降落。
进一步的,所述调节阀包括阀体、气流孔、检测腔、压力板、压力弹簧、阀板、导向控制槽、第一气流通道、第二气流通道,调节阀内部为中心对称,所述气流孔、检测腔、压力板、压力弹簧、阀板、导向控制槽有两组,分别设置在第一气流通道、第二气流通道两侧进行控制,所述阀体位于U形管中间位置,所述气流孔位于阀体内部,气流孔一端和U形管内部相联通,所述检测腔和气流孔的内侧壁相连,所述压力板位于检测腔内,压力板和检测腔密封连接,所述压力板下设置有连杆,所述连杆和阀板相连,所述压力弹簧位于检测腔内,压力弹簧一端和压力板紧固连接,压力弹簧另一端和检测腔内壁底侧紧固连接,所述检测腔下方设置有导向控制槽,所述阀板位于导向控制槽内,阀板上开有气流通孔,所述阀体内部设置有第一气流通道、第二气流通道,所述第一气流通道、第二气流通道两端分别联通U形管两侧,所述阀板上的气流通孔的直径和第一气流通道、第二气流通道的直径相同。在支撑腿组件没有双边着地时,U形管中的压力较小,此时压力板没有下移,气流可以正常通过U形槽两侧,对支撑腿组件的长度进行调节,当支撑腿组件双边同时着地时,无人机的重力使得U形管中的气体被压缩,压缩气体压强快速增大,压力板在气体压强的作用下压缩压力弹簧,靠近机头的阀板向下移动,靠近机尾的阀板向上移动,U形管两侧的气流被隔绝,在无人机降落后将两边气流隔绝可以避免因为机身震动而导致两侧支撑腿组件支撑力不平衡,从而导致两侧的活塞板位置产生偏移,导致机身倾斜。当无人机再次起飞时,压强恢复正常,压力板会在阀板的作用下恢复到初始状态,U向管两侧再次联通,两侧的支撑腿组件会在复位弹簧的作用下恢复到初始状态。
进一步的,所述支撑腿组件包括一级支撑柱、二级支撑柱、三级支撑柱、一级阻尼弹簧、二级阻尼弹簧,所述一级支撑柱内部设置有一级导向滑槽,一级支撑柱上端和内滑套紧固连接,所述一级阻尼弹簧位于一级导向滑槽内部,所述二级支撑柱上端伸入一级导向滑槽内部,二级支撑柱和一级导向滑槽滑动连接,一级阻尼弹簧一端和一级导向滑槽上端紧固连接,一级阻尼弹簧另一端和二级支撑柱上端紧固连接,所述二级支撑柱内部设置有二级导向滑槽,所述二级阻尼弹簧位于二级导向滑槽内部,所述三级支撑柱上端伸入二级导向滑槽内部,三级支撑柱和二级导向滑槽滑动连接,二级阻尼弹簧一端和二级导向滑槽上端紧固连接,二级阻尼弹簧另一端和三级支撑柱上端紧固连接,三级支撑柱下端和滚轮组件紧固连接。当固定翼式无人机落地时会产生较大的冲击力,本发明通过多级阻尼簧管来缓冲落地时的冲击力,当无人机落地时,一级阻尼弹簧和二级阻尼弹簧产生压缩,二级支撑柱、三级支撑柱向一级导向滑槽、二级导向滑槽内收缩,支撑腿组件长度的收缩给无人机的减速提供了缓冲空间,延长了减速距离,使得单位时间内支撑腿组件受到的动量冲击降低。无人机下落的能量会在弹簧的震动和支撑腿组件的伸缩摩擦中被逐渐消耗掉,该设置提高了降落的安全性,避免了支撑腿受冲击损坏导致无人机摔倒的情况出现。
进一步的,所述支撑腿组件还包括活塞挡板,所述活塞挡板安装在二级支撑柱顶部,活塞挡板侧边和一级导向滑槽密封连接,所述一级支撑柱靠近机身头部的一侧开有出气口,一级支撑柱靠近机身尾部的一侧开有进气口,所述出气口中安装有单向进气阀,所述进气口中安装有单向进气阀。当一级阻尼弹簧在下落冲击下发生收缩时,出气口会向外排出空气,空气的排出方向和无人机前进的方向相反,当一级阻尼弹簧回弹时,进气口从外界吸入空气,吸入空气的方向和无人机前行方向相同,空气的介入增大了弹簧震动时的阻力,使得下落后无人机的震动频率大大减小,且每次震动消耗的能量都更多,震动会更快的结束,虽然震动可以帮助无人机减少下落冲击力,但无人机属于精密设备,过多的震动会对设备的精确程度造成影响,所以及时的将震动的能量消耗掉是十分必要的。另一方面,本发明的出气口喷出的气流还可以帮助无人机在前进方向进行制动,缩短了无人机的制动时间。
进一步的,所述滚轮组件包括连接柱、滚轮轴、轮毂、轮胎、离合器、传动部件、定子、转子、固定架,所述连接柱一端和滚轮轴径向紧固连接,连接柱另一端和三级支撑柱下端紧固连接,所述滚轮轴两端分别和两个轮毂转动连接,所述轮胎安装在轮毂外圆周上,所述轮毂外侧通过离合器和传动部件相连,所述定子、转子和传动部件传动连接,所述固定架一端和连接柱紧固连接,固定架另一端和传动部件紧固连接。当固定翼无人机降落时,仍具有较快的速度,为了有效的无人机降落是进行制动,本发明在降落时将离合器闭合,轮胎和地面接触时带动轮毂高速旋转,轮毂的旋转通过离合器传递给主动锥齿轮,主动锥齿轮通过内转轴带动转子旋转,从动锥齿轮通过上传动锥齿轮、下传动锥齿轮的啮合传动反转,从动锥齿轮通过外轴套带动定子反转,定子内安装有磁石,在定子空间内形成了固定方向的磁场,转子上缠绕的线圈切割磁感线产生感应电流,磁场会对线圈产生制动力矩,制动力矩传递到轮毂上对滚轮进行减速。
进一步的,所述传动部件包括主动锥齿轮、从动锥齿轮、上传动锥齿轮、下传动锥齿轮、固定轴、固定环、连接套、内转轴、外轴套,所述主动锥齿轮和内转轴一端紧固连接,所述主动锥齿轮远离内转轴的一侧和离合器紧固连接,所述内转轴远离主动锥齿轮的一端和转子紧固连接,所述上传动锥齿轮和下传动锥齿轮分别和两根固定轴转动连接,上传动锥齿轮、下传动锥齿轮轮齿和主动锥齿轮、从动锥齿轮啮合,所述固定轴一端和固定环紧固连接,所述固定轴另一端和连接套外侧紧固连接,所述固定环和固定架紧固连接,所述连接套套在内转轴上,连接套和内转轴转动连接,所述从动锥齿轮和内转轴转动连接,从动锥齿轮位于连接套远离主动锥齿轮的一侧,所述外轴套一端和从动锥齿轮远离连接套的一侧紧固连接,外轴套另一端和定子紧固连接,所述转子设置于定子内部。当主动锥齿轮转动时带动上传动锥齿轮、下传动锥齿轮转动,上传动锥齿轮、下传动锥齿轮转动带动从动锥齿轮和主动锥齿轮反向转动,通过主动锥齿轮和从动锥齿轮的正反转可以将电磁制动的减速效果提升一倍,以帮助无人机更好的制动。
进一步的,所述滚轮组件还包括换向器、线圈、内层槽、外层槽、拉伸弹簧、导向磁条、第一刹车盘、第二刹车盘,所述换向器安装在内转轴内部,转子产生的交变电流通过导线传输到换向器处,换向器通过导线和线圈相连接,所述内层槽和外层槽位于轮毂内部,内层槽被外层槽所包裹,所述导向磁条插入到内层槽中,所述线圈缠绕在外层槽内壁上,导向磁条在每个轮毂里有两根对称分布,导向磁条伸出内层槽的一端和第一刹车盘紧固连接,所述第二刹车盘和滚轮轴紧固连接,所述拉伸弹簧套在导向磁条上,拉伸弹簧一端和轮毂内侧紧固连接,拉伸弹簧另一端和第一刹车盘紧固连接。转子在定子中转动产生交变电流,交变电流经过换向器转换成脉动的直流电,直流电作用于线圈产生磁场,设置线圈产生的磁场和导向磁条的磁场为相反的方向,导向磁条在电场力的作用下推动第一刹车盘和第二刹车盘贴合,第一刹车盘和第二刹车盘之间具有较大的摩擦系数,当二者接触时可以有效的降低轮毂的转速。这种制动方式相比较于传统的刹车片式刹车减小了刹车片磨损对刹车效果带来的影响,当第一刹车盘和第二刹车盘出现磨损时,在磁场力的最用下导向磁条会进一步推送第二刹车盘以弥补因摩擦而出现的空隙。另一方面,脉动式的直流电产生的磁场力也是不断波动的,磁场力的波动会使导向磁条沿水平方向抖动,在第一刹车盘和第二刹车盘之间产生了点刹的效果,并且随着轮毂速度的降低,点刹的频率也会随之降低,这种刹车方式利用轮毂自身的能量作为刹车的动力,不需要外界能量的供给,且随着轮毂转速的降低刹车力也随之减小,使得整个刹车过程更加平缓。
与现有技术相比,本发明所达到的有益效果是:本发明的平衡组件可以根据地面的坡度对支撑腿组件的长度进行调整,保证无人机的两组支撑腿组件都可以均匀的分摊载荷,使得无人机在倾斜的道路上能够以水平的姿态平稳降落。支撑腿组件采用多级阻尼簧管结构,在无人机落地的瞬间,可以通过多级簧管的压缩将下落的冲击力最大程度的吸收。滚轮组件利用电磁制动,并利用定子和转子产生的脉冲直流电,脉冲电流作用在线圈上,在第一刹车盘和第二刹车盘之间产生了点刹的效果,并且随着轮毂速度的降低,点刹的频率也会随之降低,这种刹车方式利用轮毂自身的能量作为刹车的动力,不需要外界能量的供给,且随着轮毂转速的降低刹车力也随之减小,使得整个刹车过程更加平缓。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
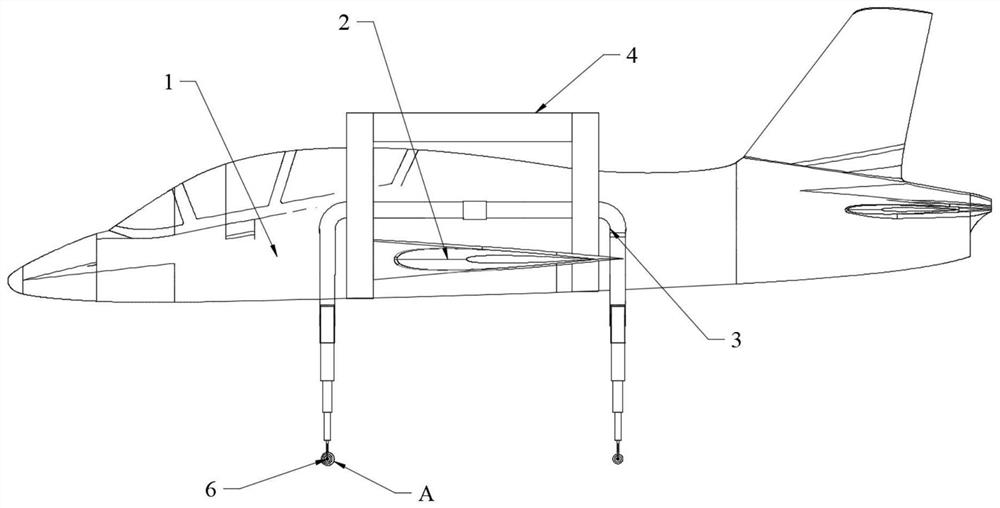
图1是本发明的整体结构示意图;
图2是本发明的局部放大图A;
图3是本发明的平衡组件剖面视图;
图4是本发明的局部放大图B;
图5是本发明的局部放大图C;
图6是本发明的支撑腿组件内部结构示意图;
图7是本发明的滚轮组件结构示意图;
图8是本发明的转子、定子、和内转轴、外转轴的连接关系图;
图中:1-机身、2-机翼、3-平衡组件、31-U形管、32-活塞板、33-内滑套、34-外滑套、35-活塞杆、36-复位弹簧、37-通气固定块、38-调节阀、381-阀体、382-气流孔、383-检测腔、384-压力板、385-压力弹簧、386-阀板、387-导向控制槽、388-第一气流通道、389-第二气流通道、4-安装支架、5-支撑腿组件、51-一级支撑柱、511-一级导向滑槽、512-进气口、513-出气口、52-二级支撑柱、521-二级导向滑槽、53-三级支撑柱、54-一级阻尼弹簧、55-二级阻尼弹簧、56-活塞挡板、6-滚轮组件、61-连接柱、62-滚轮轴、63-轮毂、64-轮胎、65-离合器、66-传动部件、661-主动锥齿轮、662-从动锥齿轮、663-上传动锥齿轮、664-下传动锥齿轮、665-固定轴、666-固定环、667-连接套、668-内转轴、669-外轴套、67-定子、68-转子、69-固定架、610-线圈、611-内层槽、612-外层槽、613-拉伸弹簧、614-导向磁条、615-第一刹车盘、616-第二刹车盘。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-8,本发明提供技术方案:
如图1、2所示,一种滚轮式多级阻尼簧管无人机防摔装置,包括机身1、机翼2、平衡组件3、安装支架4、支撑腿组件5、滚轮组件6,所述机翼2安装在机身1两侧,所述安装支架4和机身1紧固连接,所述机翼2从安装支架4中穿过,安装支架4有两组,两组安装支架4分别位于机身1两侧,所述平衡组件3有两组,两组平衡组件3分别从两组安装支架4中穿过,平衡组件3上部和安装支架4紧固连接,平衡组件3下端从机翼2两侧垂下,所述两个支撑腿组件5上端分别和一组平衡组件3下端的两侧相连,支撑腿组件5下端和滚轮组件6上端紧固连接。当无人机降落时,平衡组件3可以根据地面的坡度对支撑腿组件5的长度进行调整,保证无人机的两组支撑腿组件5都可以均匀的分摊载荷,最大程度的保持了机身1结构的稳定性,支撑腿组件5采用多级阻尼簧管结构,在无人机落地的瞬间,可以通过多级簧管的压缩将下落的冲击力最大程度的吸收,滚轮组件6通过电磁力矩对轮毂63进行制动,并且通过制动时产生的脉冲电流制造脉冲磁场,通过磁场力带动第一刹车盘615进行点刹,随着轮毂63转速的降低,产生的磁场力也随之降低,第一刹车盘615提供的刹车力矩也会随之减小,通过可自行调整的刹车力矩可以使得整个刹车过程更加稳定。
如图3、4、5所示,所述平衡组件3包括U形管31、活塞板32、内滑套33、外滑套34、活塞杆35、复位弹簧36、通气固定块37、调节阀38,所述U形管31安装在安装支架4内部,U形管31的两侧竖直管道分别位于机翼2两侧竖直向下,所述固定通气块37位于U形管31内部竖直管道部分的最上端,所述复位弹簧36一端和固定通气块37紧固连接,复位弹簧36另一端和活塞板32紧固连接,所述活塞板32和U形管31密封连接,所述活塞杆35一端和活塞板32紧固连接,活塞杆35远离活塞板32的一端和内滑套33紧固连接,所述内滑套33远离活塞杆35的一端和支撑腿组件5紧固连接,所述外滑套34外侧和U形管31内壁紧固连接,外滑套34内侧和内滑套33通过滚珠滑动连接,所述调节阀38位于U形管31中间位置。当无人机降落的地面具有一定倾斜角度时,前后滚轮会出现受力不均匀的情况,当载荷主要作用在某一组支撑腿组件5上时,可能造成支撑腿组件5的结构破坏,从而导致无人机降落时摔坏。本发明的平衡组件3针对这一问题提供了解决方法,当无人机降落在倾斜地面上时,U形管31一侧的支撑腿组件5先受力,支撑腿组件5带动内滑套33上移,内滑套33通过活塞杆35带动活塞板32上移,复位弹簧36被压缩,U形管31中的空气推动另一侧竖直管道中的活塞板32下移,另一侧的复位弹簧36被拉伸,另一侧的支撑腿组件5随之下移,当另一侧的支撑腿组件5也和地面接触时,两组支撑腿组件5共同支撑无人机,无人机机身依然能保持水平状态,无人机的重力平分在两组支撑腿组件5上,两侧的活塞板32都被向上推动,U形管31内部的气体压强增大,当压强增到到一定强度时,调节阀38闭合,U形管31两侧的气流不在互通,支撑腿组件5保持在不同高度的状态下,保证无人机在倾斜的道路上以水平的姿态平稳降落。
如图4所示,所述调节阀38包括阀体381、气流孔382、检测腔383、压力板384、压力弹簧385、阀板386、导向控制槽387、第一气流通道388、第二气流通道389,调节阀38内部为中心对称,所述气流孔382、检测腔383、压力板384、压力弹簧385、阀板386、导向控制槽387有两组,分别设置在第一气流通道388、第二气流通道389两侧进行控制,所述阀体381位于U形管381中间位置,所述气流孔382位于阀体381内部,气流孔382一端和U形管31内部相联通,所述检测腔383和气流孔382的内侧壁相连,所述压力板384位于检测腔383内,压力板384和检测腔383密封连接,所述压力板384下设置有连杆,所述连杆和阀板386相连,所述压力弹簧385位于检测腔383内,压力弹簧385一端和压力板384紧固连接,压力弹簧385另一端和检测腔383内壁底侧紧固连接,所述检测腔383下方设置有导向控制槽387,所述阀板386位于导向控制槽387内,阀板386上开有气流通孔,所述阀体381内部设置有第一气流通道388、第二气流通道389,所述第一气流通道388、第二气流通道389两端分别联通U形管31两侧,所述阀板386上的气流通孔的直径和第一气流通道388、第二气流通道389的直径相同。在支撑腿组件5没有双边着地时,U形管31中的压力较小,此时压力板384没有下移,气流可以正常通过U形槽31两侧,对支撑腿组件5的长度进行调节,当支撑腿组件5双边同时着地时,无人机的重力使得U形管31中的气体被压缩,压缩气体压强快速增大,压力板384在气体压强的作用下压缩压力弹簧385,靠近机头的阀板386向下移动,靠近机尾的阀板386向上移动,U形管31两侧的气流被隔绝,在无人机降落后将两边气流隔绝可以避免因为机身震动而导致两侧支撑腿组件5支撑力不平衡,从而导致两侧的活塞板32位置产生偏移,导致机身1倾斜。当无人机再次起飞时,压强恢复正常,压力板384会在阀板386的作用下恢复到初始状态,U向管31两侧再次联通,两侧的支撑腿组件5会在复位弹簧36的作用下恢复到初始状态。
如图6所示,所述支撑腿组件5包括一级支撑柱51、二级支撑柱52、三级支撑柱53、一级阻尼弹簧54、二级阻尼弹簧55,所述一级支撑柱51内部设置有一级导向滑槽511,一级支撑柱51上端和内滑套33紧固连接,所述一级阻尼弹簧54位于一级导向滑槽511内部,所述二级支撑柱52上端伸入一级导向滑槽511内部,二级支撑柱52和一级导向滑槽511滑动连接,一级阻尼弹簧54一端和一级导向滑槽511上端紧固连接,一级阻尼弹簧54另一端和二级支撑柱52上端紧固连接,所述二级支撑柱52内部设置有二级导向滑槽521,所述二级阻尼弹簧55位于二级导向滑槽521内部,所述三级支撑柱53上端伸入二级导向滑槽521内部,三级支撑柱53和二级导向滑槽521滑动连接,二级阻尼弹簧55一端和二级导向滑槽521上端紧固连接,二级阻尼弹簧55另一端和三级支撑柱53上端紧固连接,三级支撑柱53下端和滚轮组件6紧固连接。当固定翼式无人机落地时会产生较大的冲击力,本发明通过多级阻尼簧管来缓冲落地时的冲击力,当无人机落地时,一级阻尼弹簧54和二级阻尼弹簧55产生压缩,二级支撑柱52、三级支撑柱53向一级导向滑槽511、二级导向滑槽521内收缩,支撑腿组件5长度的收缩给无人机的减速提供了缓冲空间,延长了减速距离,使得单位时间内支撑腿组件5受到的动量冲击降低。无人机下落的能量会在弹簧的震动和支撑腿组件5的伸缩摩擦中被逐渐消耗掉,该设置提高了降落的安全性,避免了支撑腿受冲击损坏导致无人机摔倒的情况出现。
如图6所示,所述支撑腿组件5还包括活塞挡板56,所述活塞挡板56安装在二级支撑柱52顶部,活塞挡板56侧边和一级导向滑槽511密封连接,所述一级支撑柱51靠近机身1头部的一侧开有出气口512,一级支撑柱靠近机身1尾部的一侧开有进气口513,所述出气口512中安装有单向进气阀,所述进气口513中安装有单向进气阀。当一级阻尼弹簧54在下落冲击下发生收缩时,出气口513会向外排出空气,空气的排出方向和无人机前进的方向相反,当一级阻尼弹簧54回弹时,进气口512从外界吸入空气,吸入空气的方向和无人机前行方向相同,空气的介入增大了弹簧震动时的阻力,使得下落后无人机的震动频率大大减小,且每次震动消耗的能量都更多,震动会更快的结束,虽然震动可以帮助无人机减少下落冲击力,但无人机属于精密设备,过多的震动会对设备的精确程度造成影响,所以及时的将震动的能量消耗掉是十分必要的。另一方面,本发明的出气口喷出的气流还可以帮助无人机在前进方向进行制动,缩短了无人机的制动时间。
如图7、8所示,所述滚轮组件6包括连接柱61、滚轮轴62、轮毂63、轮胎64、离合器65、传动部件66、定子67、转子68、固定架69,所述连接柱61一端和滚轮轴62径向紧固连接,连接柱61另一端和三级支撑柱53下端紧固连接,所述滚轮轴62两端分别和两个轮毂63转动连接,所述轮胎64安装在轮毂63外圆周上,所述轮毂63外侧通过离合器65和传动部件66相连,所述定子67、转子68和传动部件66传动连接,所述固定架69一端和连接柱61紧固连接,固定架69另一端和传动部件66紧固连接。当固定翼无人机降落时,仍具有较快的速度,为了有效的无人机降落是进行制动,本发明在降落时将离合器65闭合,轮胎64和地面接触时带动轮毂63高速旋转,轮毂63的旋转通过离合器65传递给主动锥齿轮661,主动锥齿轮661通过内转轴668带动转子68旋转,从动锥齿轮662通过上传动锥齿轮663、下传动锥齿轮664的啮合传动反转,从动锥齿轮662通过外轴套669带动定子67反转,定子67内安装有磁石,在定子67空间内形成了固定方向的磁场,转子68上缠绕的线圈610切割磁感线产生感应电流,磁场会对线圈610产生制动力矩,制动力矩传递到轮毂63上对滚轮进行减速。
如图7、8所示,所述传动部件66包括主动锥齿轮661、从动锥齿轮662、上传动锥齿轮663、下传动锥齿轮664、固定轴665、固定环666、连接套667、内转轴668、外轴套669,所述主动锥齿轮661和内转轴668一端紧固连接,所述主动锥齿轮661远离内转轴668的一侧和离合器65紧固连接,所述内转轴668远离主动锥齿轮661的一端和转子68紧固连接,所述上传动锥齿轮663和下传动锥齿轮664分别和两根固定轴665转动连接,上传动锥齿轮663、下传动锥齿轮664轮齿和主动锥齿轮661、从动锥齿轮662啮合,所述固定轴665一端和固定环666紧固连接,所述固定轴665另一端和连接套667外侧紧固连接,所述固定环666和固定架69紧固连接,所述连接套667套在内转轴668上,连接套667和内转轴668转动连接,所述从动锥齿轮662和内转轴668转动连接,从动锥齿轮662位于连接套667远离主动锥齿轮661的一侧,所述外轴套669一端和从动锥齿轮662远离连接套667的一侧紧固连接,外轴套669另一端和定子67紧固连接,所述转子68设置于定子67内部。当主动锥齿轮661转动时带动上传动锥齿轮663、下传动锥齿轮转动664,上传动锥齿轮663、下传动锥齿轮664转动带动从动锥齿轮662和主动锥齿轮661反向转动,通过主动锥齿轮661和从动锥齿轮662的正反转可以将电磁制动的减速效果提升一倍,以帮助无人机更好的制动。
如图7、8所示,所述滚轮组件6还包括换向器、线圈610、内层槽611、外层槽612、拉伸弹簧613、导向磁条614、第一刹车盘615、第二刹车盘616,所述换向器安装在内转轴668内部,转子68产生的交变电流通过导线传输到换向器处,换向器通过导线和线圈610相连接,所述内层槽611和外层槽612位于轮毂63内部,内层槽611被外层槽612所包裹,所述导向磁条614插入到内层槽611中,所述线圈610缠绕在外层槽612内壁上,导向磁条614在每个轮毂63里有两根对称分布,导向磁条614伸出内层槽611的一端和第一刹车盘615紧固连接,所述第二刹车盘616和滚轮轴62紧固连接,所述拉伸弹簧613套在导向磁条614上,拉伸弹簧613一端和轮毂63内侧紧固连接,拉伸弹簧613另一端和第一刹车盘615紧固连接。转子68在定子67中转动产生交变电流,交变电流经过换向器转换成脉动的直流电,直流电作用于线圈610产生磁场,设置线圈610产生的磁场和导向磁条614的磁场为相反的方向,导向磁条614在电场力的作用下推动第一刹车盘615和第二刹车盘616贴合,第一刹车盘615和第二刹车盘616之间具有较大的摩擦系数,当二者接触时可以有效的降低轮毂63的转速。这种制动方式相比较于传统的刹车片式刹车减小了刹车片磨损对刹车效果带来的影响,当第一刹车盘615和第二刹车盘616出现磨损时,在磁场力的最用下导向磁条614会进一步推送第二刹车盘616以弥补因摩擦而出现的空隙。另一方面,脉动式的直流电产生的磁场力也是不断波动的,磁场力的波动会使导向磁条614沿水平方向抖动,在第一刹车盘615和第二刹车盘616之间产生了点刹的效果,并且随着轮毂63速度的降低,点刹的评率也会随之降低,这种刹车方式利用轮毂自身的能量作为刹车的动力,不需要外界能量的供给,且随着轮毂转速的降低刹车力也随之减小,使得整个刹车过程更加平缓。
本发明的工作原理:当无人机降落在倾斜地面上时,U形管31一侧的支撑腿组件5先受力,一侧的活塞板32上移,另一侧的活塞板32下移,U形管31另一侧的支撑腿组件5随之下移,当另一侧的支撑腿组件5也和地面接触时,两组支撑腿组件5共同支撑无人机,无人机机身依然能保持水平状态,调节阀38进入锁定状态。一级阻尼弹簧54和二级阻尼弹簧55产生压缩,二级支撑柱52、三级支撑柱53向一级导向滑槽511、二级导向滑槽521内收缩,支撑腿组件5长度的收缩给无人机的减速提供了缓冲空间,延长了减速距离。滚轮组件6的定子67和转子68进行电磁制动,转子68在定子67中转动产生交变电流,交变电流经过换向器转换成脉动的直流电,直流电作用于线圈610产生磁场,设置线圈610产生的磁场和导向磁条614的磁场为相反的方向,导向磁条614在电场力的作用下推动第一刹车盘615和第二刹车盘616贴合,脉动式的直流电产生的磁场力,在第一刹车盘615和第二刹车盘616之间产生了点刹的效果,并且随着轮毂63速度的降低,点刹的评率也会随之降低。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种滚轮式多级阻尼簧管无人机防摔装置
- 一种滚轮式多级阻尼簧管无人机防摔装置