高精度六自由度平台
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及自动化设备技术领域,尤其涉及高精度六自由度平台。
背景技术
针对教学和研究的需要,对六自由度工业机器人结构、运动和控制系统的认知理解和研究,要求机器人能完成相关六个自由度的运动,且要结构简单,操纵安全,成本低,一般不会造成事故;为此开发一种六自由度机器人来满足这些研究和教学的要求是很有必要的。
发明内容
发明目的:为了实现背景技术的相关功能,所以本发明提供了高精度六自由度平台。
技术方案:高精度六自由度平台,包括上平台、下平台、三组电动缸驱动组,所述上平台的分布角为6.6°,所述下平台的分布角为16.9°,所述上平台底部表面和下平台的顶部表面均形成有铰点圆,所述上平台的底部表面沿着铰接圆设有三个铰接轴,每个所述电动缸驱动组均包括有两个伺服电动缸,每个所述伺服电动缸的底部均通过虎克铰与铰点圆连接,每两个所述伺服电动缸的顶部均与一个铰接轴连接。
作为本发明的一种优选方式,所述上平台底部所对应的铰点圆直径是下平台顶部所对应的铰点圆直径的2倍。
作为本发明的一种优选方式,所述上平台的短边长度与下平台的短边长度相等。
作为本发明的一种优选方式,所述伺服电动缸采用的伺服电机为低惯量伺服电机,所述伺服电动缸采用的滚珠丝杠为研磨级滚珠丝杠。
作为本发明的一种优选方式,每个所述伺服电动缸的导程均为20mm。
作为本发明的一种优选方式,每个所述伺服电动缸的行程均为500mm。
作为本发明的一种优选方式,每个所述伺服电动缸的最小铰点长度为1025mm。
本发明实现以下有益效果:
本发明通过合理的铰点分布再加上高精度电动缸的配合使用,六自由度平台实现了运动平滑、定位精度高、无间隙转换角度等特点,且在保持较大角度和较大负载的同时依然保持稳定性。
附图说明
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本发明公开的实施例,并于说明书一起用于解释本公开的原理。
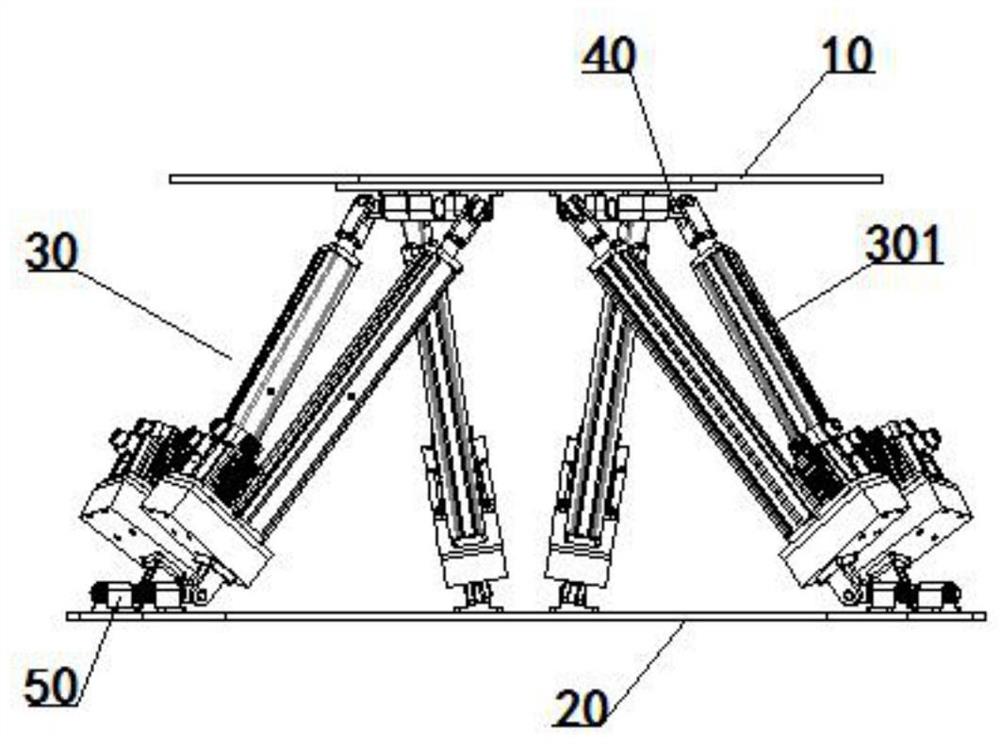
图1为本发明公开的整体结构示意图。
图2为本发明公开的仰视结构示意图。
图3为本发明公开的正视结构示意图。
图4为本发明公开的俯视结构示意图。
图5为本发明公开的铰点分布示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
实施例
参考图1-5(图4中的数字1-6均为铰点分布位),高精度六自由度平台,包括上平台10、下平台20、三组电动缸驱动组30,上平台的分布角为6.6°,下平台的分布角为16.9°,上平台底部表面和下平台的顶部表面均形成有铰点圆,上平台的底部表面沿着铰接圆D1设有三个铰接轴40,每个电动缸驱动组均包括有两个伺服电动缸301(运行速度为0-500mm/s),每个伺服电动缸的底部均通过虎克铰50(采用本司所申请的虎克铰)与铰点圆D2连接,每两个伺服电动缸的顶部均与一个铰接轴连接。
在本实施例中,上平台底部所对应的铰点圆D1直径是下平台顶部所对应的铰点圆D2直径的2倍。
在本实施例中,上平台的短边长度L1与下平台的短边长度L2相等。
在本实施例中,伺服电动缸(采用本司所申请的伺服电动缸)采用的伺服电机为低惯量伺服电机(未标出),具有运行稳定、可控性好、响应快速、灵敏度高以及机械特性和调节特性的非线性度指标严格(要求分别小于10%~15%和小于15%~25%)等特点,恰好适合用于高精度的六自由度平台,伺服电动缸采用的滚珠丝杠(未示出)为研磨级滚珠丝杠(重复定位精度可达到0.02mm),保证伺服电动缸精度是保证平台精度的基础条件。
在本实施例中,每个伺服电动缸的导程均为20mm。
在本实施例中,每个伺服电动缸的行程均为500mm。
在本实施例中,每个伺服电动缸的最小铰点长度为1025mm。
根据以上所说:合理的铰点分布再加上高精度伺服电动缸的配合使用,六自由度平台实现了运动平滑、定位精度高、无间隙转换角度,且在保持较大角度和较大负载的同时依然保持稳定性。
上述实施例只为说明本发明的技术构思及特点,其目的是让熟悉该技术领域的技术人员能够了解本发明的内容并据以实施,并不能以此来限制本发明的保护范围。凡根据本发明精神实质所作出的等同变换或修饰,都应涵盖在本发明的保护范围之内。
- 一种新型高精度六自由度平台
- 通过反解法实现的全电高精度六自由度平台