一种基于核线约束的多视角卫星影像相对误差补差方法
文献发布时间:2023-06-19 11:57:35
技术领域
本发明属于卫星立体成像技术领域,具体涉及一种基于核线约束的多视角 卫星影像相对误差补差方法。
背景技术
为了利用卫星成像获取地面目标的精细三维模型,通常采用多视角高分辨 率卫星影像进行三维重建,其中卫星影像传感器成像模型的精度直接决定着三 维重建的质量,而卫星影像供应商提供的有理函数模型参数通常带有一定的误 差。对于立体像对三维重建,这种误差可能只会使得重建的三维模型地理位置不 准确。对于基于多立体匹配的多视角卫星影像三维重建,有理函数模型误差可能 会使得多个立体匹配重建得到的三维模型难以融合,从而影响三维重建的质量。
为了提高多视角卫星影像三维重建的质量,需要对多视角卫星影像的有理 函数模型进行误差补偿。现有的方法通常利用控制点来对有理函数模型进行误 差补偿。例如,“缺少控制点的SPOT-5HRS影像RPC模型区域网平差,李德仁等, 2006”,以及“高分辨率卫星遥感精确对地目标定位理论与方法,袁修孝等,2012” 等文献中,利用地面控制点,采用区域网平差的方法来对传感器成像模型进行误 差补偿。
由于卫星成像通常用于全球影像获取,对于一些偏远地区和受限制的境外 区域来说,对应的地面控制点难以获得。这种情况下,无法利用地面控制点来对 有理函数模型进行误差补偿。
发明内容
有鉴于此,本公开提出了一种基于核线约束的多视角卫星影像相对误差补 差方法,能够利用立体影像间的核线约束来进行有理函数模型的相对误差补偿, 提升卫星影像有理函数模型的精度,减小误差补偿后的总体误差。
根据本发明的一方面,提出了一种基于核线约束的多视角卫星影像相对误 差补差方法,所述方法包括:
选择所述多视角卫星影像的参考影像;
将所述多视角卫星影像的其余影像与所述参考影像组成立体像对,利用特 征提取匹配算法提取所述立体像对中的共轭点;
将所述共轭点在匹配影像中生成对应的核线;
针对每对共轭点,计算所述共轭点与对应核线间的最小距离,将所述最小距 离作为误差;
对所有共轭点与对应核线的误差求平均值,利用所述误差平均值对所述匹 配影像的有理函数模型进行相对误差补偿。
在一种可能的实现方式中,所述选择所述多视角卫星影像的参考影像,包括: 对所述多视角卫星影像的方向角进行分析,选择倾斜角最小的卫星影像作为参 考影像。
在一种可能的实现方式中,该方法还包括:
根据像方补偿中的平移补偿方法,利用所述误差平均值对所述匹配影像的 有理函数模型进行相对误差补偿。
本公开的基于核线约束的多视角卫星影像相对误差补差方法,通过选择所 述多视角卫星影像的参考影像;将所述多视角卫星影像的其余影像与所述参考 影像组成立体像对,利用特征提取匹配算法提取所述立体像对中的共轭点;将所 述共轭点在匹配影像中生成对应的核线;针对每对共轭点,计算所述共轭点与对 应核线间的最小距离,将所述最小距离作为误差;对所有共轭点与对应核线的误 差求平均值,利用所述误差平均值对所述匹配影像的有理函数模型进行相对误 差补偿。能够利用立体影像间的核线约束来进行有理函数模型的相对误差补偿, 提升卫星影像有理函数模型的精度,减小误差补偿后的总体误差。
根据下面参考附图对示例性实施例的详细说明,本公开的其它特征及方面 将变得清楚。
附图说明
包含在说明书中并且构成说明书的一部分的附图与说明书一起示出了本公 开的示例性实施例、特征和方面,并且用于解释本公开的原理。
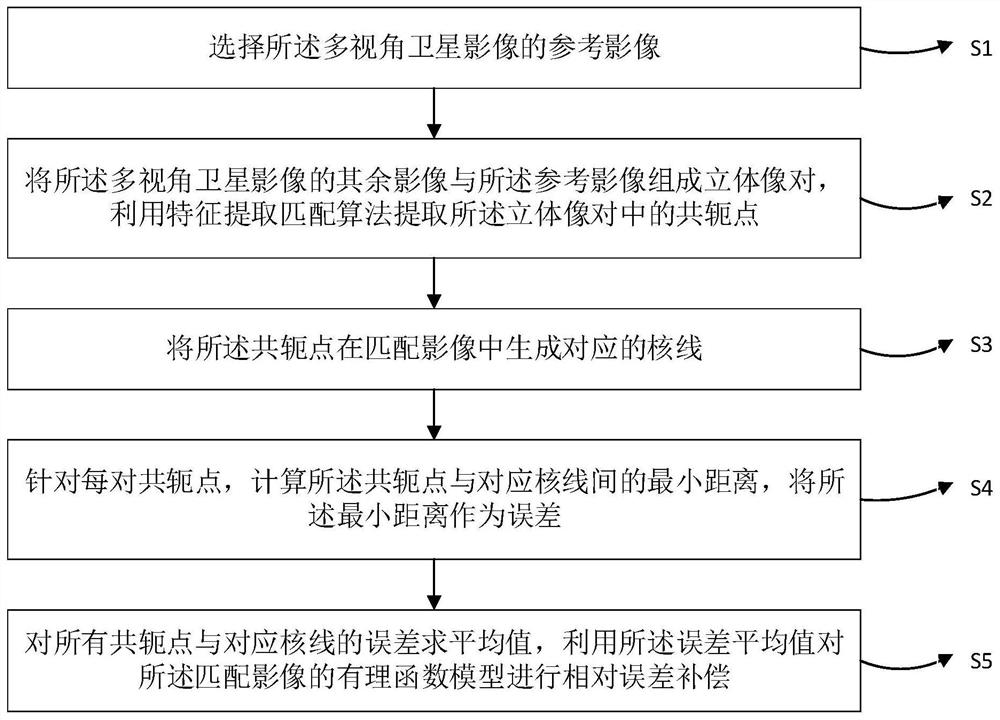
图1示出根据本公开一实施例的基于核线约束的多视角卫星影像相对误差 补差方法流程图;
图2示出根据本公开一实施例的多视角卫星影像的立体像对核线误差示意 图;
图3a示出根据本公开一实施例的Pleiades-1三视角卫星影像覆盖区域 示意图;
图3b示出根据本公开一实施例的WorldView-3三视角卫星影像覆盖区 域示意图;
图4a示出根据本公开一实施例的Pleiades1-1三视角卫星影像补偿前误 差示意图;
图4b示出根据本公开一实施例的Pleiades1-1三视角卫星影像补偿后误 差示意图;
图5a示出根据本公开一实施例的Pleiades1-3三视角卫星影像补偿前误 差示意图;
图5b示出根据本公开一实施例的Pleiades1-3三视角卫星影像补偿后误 差示意图。
具体实施方式
以下将参考附图详细说明本公开的各种示例性实施例、特征和方面。附图中 相同的附图标记表示功能相同或相似的元件。尽管在附图中示出了实施例的各 种方面,但是除非特别指出,不必按比例绘制附图。
在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示 例性”所说明的任何实施例不必解释为优于或好于其它实施例。
另外,为了更好的说明本公开,在下文的具体实施方式中给出了众多的具体 细节。本领域技术人员应当理解,没有某些具体细节,本公开同样可以实施。在 一些实例中,对于本领域技术人员熟知的方法、手段、元件和电路未作详细描述, 以便于凸显本公开的主旨。
为了利用多视角高分辨率光学卫星影像实现高质量的三维重建,利用立体 影像间的核线约束来进行有理函数模型的相对误差补偿,提升卫星影像有理函 数模型的精度,下面简单介绍下有理函数模型和核线理论。
由于保密性和通用性的优势,有理函数模型已经成为当前卫星影像所采用 的主流传感器模型。有理函数模型作为一种通用的传感器模型,描述了影像与地 面目标的相对位置关系。影像与地面目标的相对位置关系一定程度上就反映了 卫星成像时与地面目标的相对位置关系。
有理函数模型的前向表达式(Forward Form)建立了从地面坐标到像平面坐 标的转换公式,其具体形式为:
其中,点(r,c)和(X,Y,Z)分别表示像平面坐标(r
点(r,c)和点(X,Y,Z)之间其变换关系为:
式中,(X
式中,a
图2示出根据本公开一实施例的多视角卫星影像的立体像对核线误差示意 图。
如图2所示,根据核线理论,立体像对中的一对共轭点(p,p'),对于左影像 上的像点p,右影像中的共轭点p’必然落在相应的核线l上。但由于误差的存 在,右影像中的共轭点p’可能不会落在相应的核线上,如图2右图所示。共轭 点p’点与对应核线l之间的距离可以认为是由传感器参数误差导致的指向性 误差。因此,可以利用这种核线约束来对传感器模型参数误差进行补偿。
图1示出根据本公开一实施例的基于核线约束的多视角卫星影像相对误差 补差方法流程图。
对于多视角卫星影像,由于卫星在倾斜成像过程中容易引起卫星位姿测量 误差和影像的畸变。通常来说,当卫星对星下点成像,卫星倾斜角为零时,测量 误差和影像畸变较小。因此,本文选择多视角卫星影像数据集中倾斜角最小的卫 星影像作为参考影像,通过对剩余影像的有理函数模型进行误差补偿来实现多 视角卫星影像的相对误差补偿。
如图1所示,该方法可以包括:
步骤S1:选择所述多视角卫星影像的参考影像。
其中,对所述多视角卫星影像(两张以上)的方向角进行分析,选择倾斜角 最小的卫星影像作为参考影像。
步骤S2:将所述多视角卫星影像的其余影像与所述参考影像组成立体像对, 利用特征提取匹配算法提取所述立体像对中的共轭点。其中,特征提取匹配算法 可以为SIFT算法。
步骤S3:将所述共轭点在匹配影像中生成对应的核线。
其中,匹配影像可以为与参考影像组成立体像对的影像,例如图2中,左影 像为参考影像,与左影像组成立体像对的右影像为匹配影像。
步骤S4:针对每对共轭点,计算所述共轭点与对应核线间的最小距离,将所 述最小距离作为误差;
步骤S5:对所有共轭点与对应核线的误差求平均值,利用所述误差平均值对 所述匹配影像的有理函数模型进行相对误差补偿。
其中,可以根据像方补偿中的平移补偿方法,利用所述误差平均值对所述匹 配影像的有理函数模型进行相对误差补偿。
高分辨率卫星通常运行在几百公里高的太阳同步轨道,为了实现高分辨率 成像,影像的覆盖范围较小,卫星的成像视场角也很小,相对于目标区域的尺度 来说,可以认为高分辨率卫星在无穷远处成像,此时可以认为只存在平移误差, 则对于高分辨率光学卫星影像的相对误差补偿可以采用像方补偿中的平移补偿 方案,具体形式如下:
应用示例:
图3a和图3b分别示出根据本公开一实施例的Pleiades-1三视角卫星和WorldView-3三视角卫星的影像覆盖区域示意图。
第一组是Pleiades-1卫星获取的三视角同轨高分辨率卫星影像;第二组是WorldView-3卫星获取的10张不同视角的异轨高分辨率卫星影像。两组多视角 卫星影像的覆盖区域如图3a和图3b所示。
Pleiades-1卫星获取的三视角高分辨卫星影像的相关信息如表1所示,影像 覆盖区域为澳大利亚墨尔本(Melbourne,Australia),地面分辨率约为0.5m。WorldView-3卫星获取的10张不同视角的高分辨率推扫式卫星影像相关信息如 表2所示,影像覆盖区域为阿根廷布宜诺斯艾利斯(Buenos Aires,Argentina), 地面分辨率约为0.31m。
表1 Pleiades-1三视角卫星影像基本信息
表1 WV3多视角卫星影像基本信息
图4a和图4b分别示出根据本公开一实施例的Pleiades1-1三视角卫星影像 补偿前和补偿后的误差示意图。图5a和图5b分别示出根据本公开一实施例 的Pleiades1-3三视角卫星影像补偿前和补偿后的误差示意图。
对于Pleiades-1三视角卫星影像,选取倾斜角最小的影像Pleiades1-2作为参 考影像,影像Pleiades1-2与另外两张影像Pleiades1-1和Pleiades1-3组成2-1和 2-3两个立体像对。在两个立体像对中分别对Pleiades1-1影像和Pleiades1-3影 像进行相对误差补偿。实验结果如图4a和图4b、图5a和图5b所示,为了便于 观察,将误差放大了50倍进行展示。
从图4a和图4b、图5a和图5b中可以看出,Pleiades1三视角卫星影像RFM 补偿后的误差明显小于补偿前的误差。将图中所有连接点的指向性误差进行统 计分析,结果如表3所示。此外,为了验证平移补偿方案的可行性,我们将相对 误差补偿后的Pleiades1-1和Pleiades1-3组成立体像对,计算其指向性误差,并 与补偿前的指向性误差进行对比。
表2 Pleiades1三视角卫星影像RFM相对误差补偿结果表
表中的Mean cu error为所有连接点列方向平均误差,Mean ru error为 所有连接点行方向平均误差。
从Pleiades1三视角卫星影像RPC参数相对误差补偿结果来看,以Pleiades1- 2为参考影像,对三视角卫星影像Pleiades1-1和三视角卫星影像Pleiades1-3进 行补偿后,立体像对间的指向性误差明显小于补偿前的指向性误差。而将补偿后 的Pleiades1-1和Pleiades1-3组成新的立体像对时,其指向性误差同样得到了明 显的下降,且补偿后的指向性误差与前两个立体像对补偿后的误差大小基本一 致。说明我们提出的相对误差补偿方案能够有效的减小多视角卫星影像的相对 误差。
对于WorldView-3多视角卫星影像,选取多视角卫星影像数据集中倾斜角 最小的WV3-6影像作为参考影像,将剩余的9张影像与参考影像组成立体像对, 分别对9张影像的有理函数模型进行相对误差补偿,结果如表4所示,展示了9 个立体像对的进行相对误差补偿前、后的指向性误差。
表4 WorldView3多视角卫星影像RFM相对误差补偿结果表
从表中可以看出WorldView3多视角卫星影像组成立体像对时,不同像对的 指向性误差差异较大,最大的指向性误差接近10个像素,这对于分辨率为0.31 的影像来说,可能会带来将近3m的地面误差。
从WorldView3多视角卫星影像RPC参数相对误差补偿结果来看,其指向 性误差得到了明显的下降。在相对误差补偿前,9个立体像对的指向性误差均值 为列方向3.4897个像素和行方向-3.6646个像素。误差补偿后,指向性误差均值 为列方向-0.0152个像素和行方向-0.0139个像素,降低了两个数量级。验证了我 们提出的多视角卫星影像相对误差补偿方案的有效性。
本公开的基于核线约束的多视角卫星影像相对误差补差方法,通过选择所 述多视角卫星影像的参考影像;将所述多视角卫星影像的其余影像与所述参考 影像组成立体像对,利用特征提取匹配算法提取所述立体像对中的共轭点;将所 述共轭点在匹配影像中生成对应的核线;针对每对共轭点,计算所述共轭点与对 应核线间的最小距离,将所述最小距离作为误差;对所有共轭点与对应核线的误 差求平均值,利用所述误差平均值对所述匹配影像的有理函数模型进行相对误 差补偿。能够利用立体影像间的核线约束来进行有理函数模型的相对误差补偿, 提升卫星影像有理函数模型的精度,减小误差补偿后的总体误差。
以上已经描述了本公开的各实施例,上述说明是示例性的,并非穷尽性的, 并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的 情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。 本文中所用术语的选择,旨在最好地解释各实施例的原理、实际应用或对市场中 的技术改进,或者使本技术领域的其它普通技术人员能理解本文披露的各实施 例。
- 一种基于核线约束的多视角卫星影像相对误差补差方法
- 一种基于混合损失函数约束的卫星影像超分辨率重建方法