一种竹荪结构的仿生形变自适应柔性密封3D打印设备
文献发布时间:2023-06-19 12:05:39
技术领域
本发明涉及增材制造技术领域,特别涉及一种竹荪结构的仿生形变自适应柔性密封3D打印设备。
背景技术
由于金属3D打印的不断普及,在不同金属打印应用过程中发现,相对活泼金属在常规环境下打印容易发生爆燃现象,故部分金属需要在严格控制氧气含量的密封环境下进行3D打印加工,由于柔性密封设备在实现多轴联动情况下会出现两种情况:1.随运动的产生空间收缩时,柔性体形变趋势不固定,会发生打印头高温将柔性密封舱损坏现象。2.随运动的产生空间膨胀时,柔性体出现阻碍运动的作用力,从而无法提高精度。所以现有金属3D打印设备密封结构多为刚性包裹式密封结构,而刚性结构具有安装成本高、耗费气体多、加工过程中部分角度加工情况无法观察、移动后需重新调整密封性能等不足。
发明内容
本发明的目的是针对背景技术中所述的问题和不足,一种竹荪结构的仿生形变自适应柔性密封3D打印设备。
一种竹荪结构的仿生形变自适应柔性密封3D打印设备,包括承重底板,所述的承重底板上分别设有机械手和操作台;
操作台包括升降组件,载物板通过升降组件连接在操作台上端,载物板上端设有矩形工作台,矩形工作台外周设有向内凹陷的密封槽,矩形工作台底部设有排气管,排气管上设有第一排气单向电磁阀,排气管与外部负压泵连接;
机械手工作端连接有密封端盖,密封端盖下端周向设有环状夹紧槽,密封端盖下端与密封层上端通过带卡扣件的收紧条紧密连接,密封层下端外周连接有固定环且密封层下端向外延伸翻折将固定环包裹,密封层下端内侧设有环状充气密封圈,工作时,环状充气密封圈与矩形工作台外周密封槽密封连接,密封端盖上设有延伸至密封端盖内部的温湿度传感器、氧含量检测传感器、压力传感器、焊接头和第一进气单向电磁阀,环状充气密封圈上设有进气管;进气管与充气泵连接,第一进气单向电磁阀与外部惰性气体气管连接;
密封层包括密封内层和密封外层,多组环状仿竹荪结构支撑夹层纵向不接触的分布在密封内层和密封外层之间,相邻两个环状仿竹荪结构支撑夹层之间设有换向区;
所述的第一进气单向电磁阀和第一排气单向电磁阀与外部控制单元电连接;
外部控制单元控制机械手按照预先设定的程序工作并对温湿度传感器、氧含量检测传感器和压力传感器进行数据采集。
所述的进气管上设有第二电磁阀。
本发明的有益效果:
仿照竹荪结构在自然界中受外力后有趋势导向的运动特点和强作用力不断裂且有支撑挺立的特点设计出柔性结构的支撑层,再由内外两层柔性密封提进行包裹,实现3D打印设备在多轴运动时,由运动产生柔性腔体收缩的情况下,使密封层有运动导向的压缩,从而避免了打印头与柔性密封体距离过近导致高温破坏柔性密封体;由运动产生柔性腔体膨胀的情况下,由于支撑结构的存在减少了柔性体的膨胀量,竹荪结构起到对涨紧力的自适应分布,由于涨紧后竹荪结构的伸缩量将会降低,故将竹荪结构以柔性材料间隔开,从而提高伸缩量。该设计提供了更为可行的柔性密封方案。相比较刚性包裹式密封可减少惰性气体的损耗量,且加工过程容易观察。根据现有3D行业发展,对于模具、器件的现场修复是一个发展方向,实现柔性密封,为现场3D打印修复提供了可靠的气体环境,提高了现场修复的可能性。
附图说明
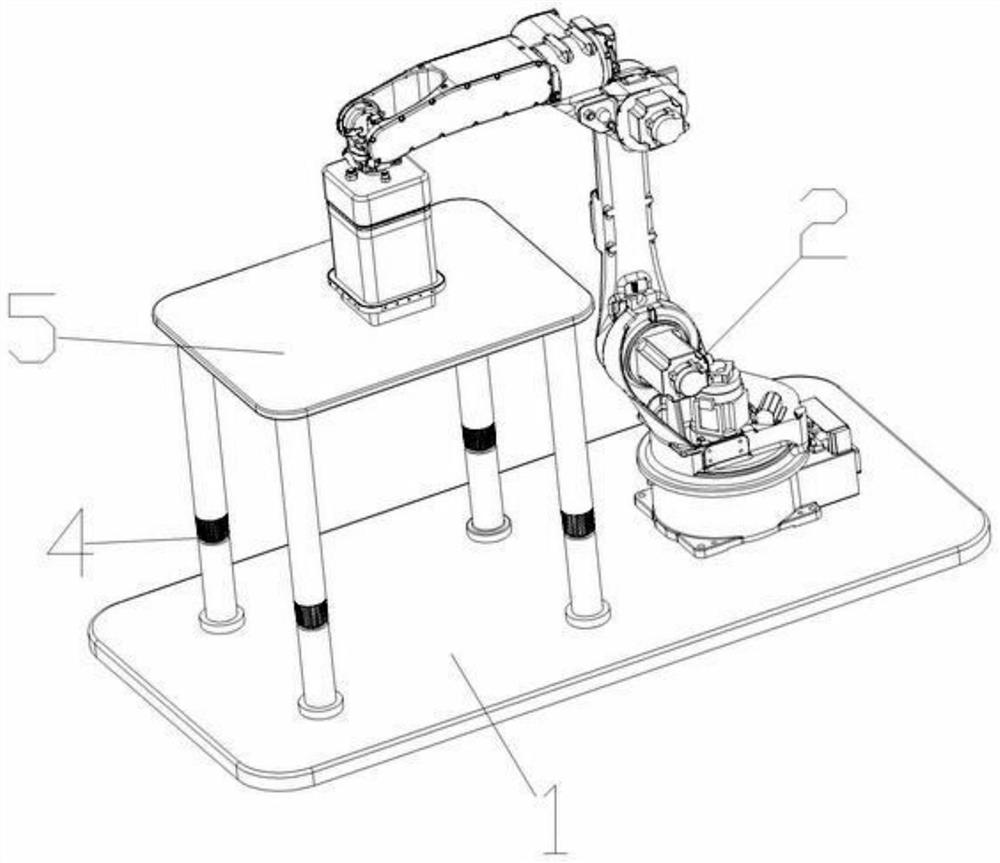
图1是本发明立体示意图。
图2是升降组件和机械手未安装在本发明上的结构示意图。
图3升降组件和机械手未安装在本发明上的局部俯视图。
图4是图3中A-A处局部放大示意图。
图5是图4中B处局部放大示意图。
图6是图4中C处局部放大示意图。
图7是环状仿竹荪结构支撑夹层分布在密封内层处结构示意图。
具体实施方式
参阅图1至图7所示,一种竹荪结构的仿生形变自适应柔性密封3D打印设备,包括承重底板1,所述的承重底板1上分别设有机械手2和操作台;
操作台包括升降组件4,载物板5通过升降组件4连接在操作台上端,载物板5上端设有矩形工作台6,矩形工作台6外周设有向内凹陷的密封槽7,矩形工作台6底部设有排气管3,排气管3上设有第一排气单向电磁阀,排气管3与外部负压泵连接;
机械手2工作端连接有密封端盖8,密封端盖8下端周向设有环状夹紧槽23,密封端盖8下端与密封层9上端通过带卡扣件的收紧条10紧密连接,密封层9下端外周连接有固定环11且密封层9下端向外延伸翻折将固定环11包裹,密封层9下端内侧设有环状充气密封圈12,工作时,环状充气密封圈12与矩形工作台6外周密封槽7密封连接,密封端盖8上设有延伸至密封端盖8内部的温湿度传感器13、氧含量检测传感器14、压力传感器15、焊接头16和第一进气单向电磁阀17,环状充气密封圈12上设有进气管18;进气管18与充气泵连接,第一进气单向电磁阀17与外部惰性气体气管连接;
密封层9包括密封内层19和密封外层20,多组环状仿竹荪结构支撑夹层21纵向不接触的分布在密封内层19和密封外层20之间,相邻两个环状仿竹荪结构支撑夹层21之间设有换向区22;
所述的第一进气单向电磁阀17和第一排气单向电磁阀与外部控制单元电连接;
外部控制单元控制机械手2按照预先设定的程序工作并对温湿度传感器13、氧含量检测传感器14和压力传感器15进行数据采集。
所述的进气管18上设有第二电磁阀。
工作原理及使用过程:
步骤一,外部控制单元按照预先设定的程序控制机械手2带动密封层9和环状充气密封圈12移动至矩形工作台6上端;
步骤二,充气泵对环状充气密封圈12充气使矩形工作台6与密封层9之间挤压密封,密封层9内部形成密闭结构;
步骤三,外部控制单元控制机械手2带动焊接头16向下移动直至焊接头16下端趋近矩形工作台6上表面,密封层9被压缩;
步骤四,外部控制单元打开第一进气单向电磁阀17向密封层9空腔结构内填充惰性气体,并控制第一排气单向电磁阀排出密封层9空腔结构内原有的空气;
步骤五,当温湿度传感器13、氧含量检测传感器14和压力传感器15检测到密封层9空腔结构内部的氧气含量达到外部控制单元预先设定的气体含量时,停止加注惰性气体;
步骤六,外部控制单元控制焊接头16开始金属打印,机械手2带动密封层9空腔结构压缩时,环状仿竹荪结构支撑夹层21起多维度自适应导向作用,使腔体按预想情况进行形变,机械手2带动密封层9空腔结构伸张时,环状仿竹荪结构支撑夹层21起支撑作用,相邻环状仿竹荪结构支撑夹层21连接处的柔性材料换向区22为可控形变承载的主要运动量;
步骤七,打印时,可观察全部角度加工过程。加工出现错误可立刻停止,减少损耗。
- 一种竹荪结构的仿生形变自适应柔性密封3D打印设备
- 一种竹荪结构的仿生形变自适应柔性密封3D打印设备