一种基于工业机器人的开关磁阻电机伺服的组合驱动装置
文献发布时间:2023-06-19 12:19:35
技术领域
本发明属于电机驱动技术领域,更具体地说,特别涉及一种基于工业机器人的开关磁阻电机伺服的组合驱动装置。
背景技术
电机驱动器说白就是个开关,因为电机驱动电流很大或者电压很高,一般的开关或者电子元件不能作为控制电机的开关时就要加个所谓的驱动器来控制电机,电机驱动器的作用指通过控制电机的旋转角度和运转速度,以此来实现对占空比的控制来达到对电机怠速控制的方式。
如申请号为:CN202020317066.4的专利中,公开了一种工业机器人用开关磁阻电机伺服驱动装置,包括伺服驱动器、功率变换电路、角度传感器、速度传感器、转矩传感器、开关磁阻电机和工业机器人;所述伺服驱动器包括参考转速存储器、转速控制电路、电流控制电路、电流差分电路、开关角优化电路、关断角优化电路和控制器;该工业机器人用开关磁阻电机伺服驱动装置在对工业机器人进行伺服驱动控制过程中,控制器根据当前开关磁阻电机实时转速信号、角度信号以及工业机器人的转矩信号对开关磁阻电机的开通角和关断角进行优化分析处理得到功率变换器驱动电流信号和开关磁阻电机的最优转速、最优电流和最优角度,以实现开关磁阻电机对工业机器人的控制始终处于最优化性能状态。
基于上述,现有的电机驱动装置中,传统电子元件中的芯片通常焊接在主板上,在其中一组芯片损坏时,还需要将芯片从主板上解焊,进而对芯片进行更换,而且在芯片冷却时,多采用散热插片,散热时,循环风无法直接对芯片进行散热,散热效果较差。
发明内容
为了解决上述技术问题,本发明提供一种基于工业机器人的开关磁阻电机伺服的组合驱动装置,以解决芯片通常焊接在主板上,在其中一组芯片损坏时,还需要将芯片从主板上解焊,进而对芯片进行更换,而且在芯片冷却时,多采用散热插片,散热时,循环风无法直接对芯片进行散热,散热效果较差的问题。
本发明基于工业机器人的开关磁阻电机伺服的组合驱动装置的目的与功效,由以下具体技术手段所达成:
一种基于工业机器人的开关磁阻电机伺服的组合驱动装置,包括壳体;
所述壳体的内侧固定连接有内芯连接框,且内芯连接框的内侧中间设有一电子元件插板,壳体外侧的端口与电子元件插板电性连接;
卡位柱为塑料材质,并连接在电子元件插板的两端与内芯连接框之间;
壳体的前侧端通过螺钉连接有前连接盖;
内芯连接框的内侧后端还连接有限位框;
电子元件插板上安装有电子元件导向安装结构,且芯片通过电子元件导向安装结构与电子元件插板插装连接。
进一步的,所述电子元件导向安装结构包括:
插装板,插装板为方形结构,并为塑料材质,其长度、宽度均小于内芯连接框内侧的长度与宽度;
安装槽孔,安装槽孔设在插装板的外侧面上,插装板与电子元件插板贴合时,安装槽孔上的插孔与电子元件插板上的插孔相对,芯片从插装板的外侧插入到安装槽孔中,且芯片的插脚穿过安装槽孔并插入到电子元件插板的插孔中;
内挡板,内挡板设有两组,并分别设在插装板内侧的上下两端,插装板与电子元件插板贴合时,内挡板分别贴在电子元件插板的上下两侧;
插装把手,插装把手设有两组,并分别连接在插装板的外侧上下两端。
进一步的,所述内挡板的中间位置还设有一限位挡孔,且插装板与电子元件插板贴合时,限位挡孔的内侧端与卡位柱卡合。
进一步的,所述内芯连接框的外侧一端还转动连接有翻转盖,且翻转盖上安装有电子元件卡位结构,且翻转盖与内芯连接框的外侧另一端之间通过螺钉固定,翻转盖上还设有出气孔。
进一步的,所述电子元件卡位结构包括:
橡胶压板,橡胶压板为圆形结构,并设在翻转盖的内侧端;
塑料柱,塑料柱活动穿插在翻转盖上,内侧端与橡胶压板固定连接,外侧端与塑料挡板固定连接;
撑簧,套装在塑料柱上,并设在橡胶压板与翻转盖之间;
塑料挡板,塑料挡板也为圆形结构,并设在翻转盖的外侧端。
进一步的,所述翻转盖与内芯连接框的外侧另一端通过螺钉固定时,橡胶压板分别贴在芯片的外侧面上,且橡胶压板的外径分别与对应的芯片宽度相一致。
进一步的,所述壳体的后侧中间设有一缺口,缺口的外侧设有金属散热肋,且缺口内还安装有散热除尘结构。
进一步的,所述散热除尘结构包括:
活动板,活动板通过螺钉与限位框固定连接,并卡装在缺口中;
散热扇,散热扇设有两组,并安装在活动板的外侧;
防尘框,防尘框插入到限位框的内侧,并设在于防尘框设在活动板内侧。
进一步的,所述防尘框的外侧端连接有外连接框,外连接框的四端角处设有螺钉穿孔,且外连接框置于活动板与限位框之间,防尘框的内侧端镶嵌有防尘网。
进一步的,所述活动板上还设有气孔,散热扇的内侧端与气孔相对,且防尘框设在气孔外侧。
本发明至少包括以下有益效果:
1、本发明通过设置电子元件导向安装结构与电子元件卡位结构,在将芯片插装在插装板上时,便于利用插装把手将插装板卡入到电子元件插板上,并使芯片的插脚插入到插孔中,与电子元件插板连接,并在将旋转盖与内芯连接框通过螺钉连接后,能够使橡胶压板在撑簧的作用下,压在芯片的外侧面,防止芯片的插脚与电子元件插板脱离,进而在其中一组芯片损坏时,能够方便更换,只需将前连接盖拆下,并将旋转盖打开,将芯片抽出即可,操作更加方便。
2、本发明通过设置散热除尘结构,利用两组散热扇将循环风通过气孔送入到壳体内部,对内芯连接框内的电子元件插板以及芯片组件进行冷却,同时通过防尘框内侧前端的防尘网对冷却送风的灰尘进行除尘,避免灰尘导致电子元件插板以及芯片损坏,还可将活动板以及防尘框拆下,对防尘网上的灰尘进行清理。
附图说明
图1是本发明的结构示意图。
图2是本发明图1中的另一视角结构示意图。
图3是本发明图1中前连接盖拆下时的结构示意图。
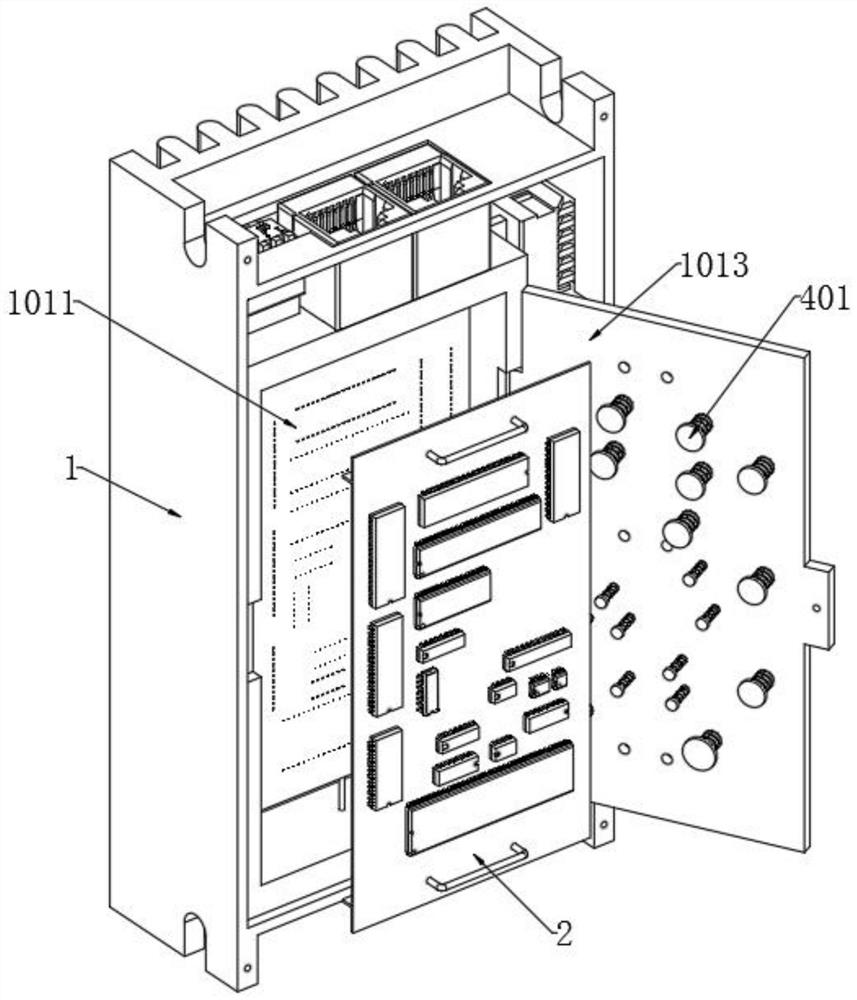
图4是本发明图3中旋转盖打开后的结构示意图。
图5是本发明图4中插装板与芯片向外拔出时的结构示意图。
图6是本发明图5中插装板与芯片拆除后的结构示意图。
图7是本发明图6中活动板与防尘框拆下时的结构示意图。
图8是本发明中图7的另一视角结构示意图。
图9是本发明中芯片从插装板上拆下时的结构示意图。
图10是本发明中图9的另一视角结构示意图。
图中,部件名称与附图编号的对应关系为:
1、壳体;
101、内芯连接框;1011、电子元件插板;1012、卡位柱;1013、翻转盖;102、前连接盖;103、金属散热肋;104、缺口;105、限位框;
2、插装板;201、安装槽孔;202、内挡板;2021、限位挡孔;203、插装把手;
3、芯片;
401、橡胶压板;402、塑料柱;403、撑簧;404、塑料挡板;
5、活动板;501、气孔;
6、散热扇;
7、防尘框;701、外连接框;702、防尘网。
具体实施方式
下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“同轴”、“底部”、“一端”、“顶部”、“中部”、“另一端”、“上”、“一侧”、“顶部”、“内”、“前部”、“中央”、“两端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置”、“连接”、“固定”、“旋接”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
实施例:
如附图1至附图10所示:
本发明提供一种基于工业机器人的开关磁阻电机伺服的组合驱动装置,包括壳体1;
壳体1的内侧固定连接有内芯连接框101,且内芯连接框101的内侧中间设有一电子元件插板1011,壳体1外侧的端口与电子元件插板1011电性连接;
卡位柱1012为塑料材质,并连接在电子元件插板1011的两端与内芯连接框101之间;
壳体1的前侧端通过螺钉连接有前连接盖102;
内芯连接框101的内侧后端还连接有限位框105;
电子元件插板1011上安装有电子元件导向安装结构,且芯片3通过电子元件导向安装结构与电子元件插板1011插装连接。
其中,电子元件导向安装结构包括:
插装板2,插装板2为方形结构,并为塑料材质,其长度、宽度均小于内芯连接框101内侧的长度与宽度;
安装槽孔201,安装槽孔201设在插装板2的外侧面上,插装板2与电子元件插板1011贴合时,安装槽孔201上的插孔与电子元件插板1011上的插孔相对,芯片3从插装板2的外侧插入到安装槽孔201中,且芯片3的插脚穿过安装槽孔201并插入到电子元件插板1011的插孔中;
内挡板202,内挡板202设有两组,并分别设在插装板2内侧的上下两端,插装板2与电子元件插板1011贴合时,内挡板202分别贴在电子元件插板1011的上下两侧,内挡板202的中间位置还设有一限位挡孔2021,且插装板2与电子元件插板1011贴合时,限位挡孔2021的内侧端与卡位柱1012卡合
插装把手203,插装把手203设有两组,并分别连接在插装板2的外侧上下两端,便于将芯片3装在插装板2的安装槽孔201后,通过插装把手203将插装板2卡入到电子元件插板1011上,使芯片3的插脚插入到电子元件插板1011的插孔中,与电子元件插板1011连接,并在其中一组芯片3损坏时,能够方便更换。
其中,内芯连接框101的外侧一端还转动连接有翻转盖1013,且翻转盖1013上安装有电子元件卡位结构,且翻转盖1013与内芯连接框101的外侧另一端之间通过螺钉固定,翻转盖1013上还设有出气孔。
其中,电子元件卡位结构包括:
橡胶压板401,橡胶压板401为圆形结构,并设在翻转盖1013的内侧端;
塑料柱402,塑料柱402活动穿插在翻转盖1013上,内侧端与橡胶压板401固定连接,外侧端与塑料挡板404固定连接;
撑簧403,套装在塑料柱402上,并设在橡胶压板401与翻转盖1013之间;
塑料挡板404,塑料挡板404也为圆形结构,并设在翻转盖1013的外侧端;
翻转盖1013与内芯连接框101的外侧另一端通过螺钉固定时,橡胶压板401分别贴在芯片3的外侧面上,且橡胶压板401的外径分别与对应的芯片3宽度相一致,在将旋转盖1013与内芯连接框101另一端通过螺钉连接后,能够使橡胶压板401在撑簧403的作用下,压在芯片3的外侧面,防止芯片3的插脚与电子元件插板1011脱离。
其中,壳体1的后侧中间设有一缺口104,缺口104的外侧设有金属散热肋103,且缺口104内还安装有散热除尘结构,散热除尘结构包括:
活动板5,活动板5通过螺钉与限位框105固定连接,并卡装在缺口104中;
散热扇6,散热扇6设有两组,并安装在活动板5的外侧;
防尘框7,防尘框7插入到限位框105的内侧,并设在于防尘框7设在活动板5内侧,两组散热扇6能够将循环风通过气孔501送入到壳体1内部,对内芯连接框101内的电子元件插板1011以及芯片3组件进行冷却,同时通过防尘框7内侧前端的防尘网702对冷却送风的灰尘进行除尘。
其中,防尘框7的外侧端连接有外连接框701,外连接框701的四端角处设有螺钉穿孔,且外连接框701置于活动板5与限位框105之间,防尘框7的内侧端镶嵌有防尘网702。
其中,活动板5上还设有气孔501,散热扇6的内侧端与气孔501相对,且防尘框7设在气孔501外侧。
本实施例的具体使用方式与作用:
本发明中,将防尘框7的前端通过缺口104插入到限位框105内,并使外连接框1071与限位框105的外侧相贴,然后将活动板5与两组散热扇6卡入到缺口104中,并通过螺钉与限位框105固定相连;
将芯片3装在插装板2的安装槽孔201后,通过插装把手203将插装板2卡入到电子元件插板1011上,使芯片3的插脚插入到电子元件插板1011的插孔中,与电子元件插板1011连接,并使内挡板202分别与电子元件插板1011的上下两端相贴,使限位挡孔2021与卡位柱1012卡合,然后将旋转盖1013与内芯连接框101另一端通过螺钉连接后,使橡胶压板401在撑簧403的作用下,压在芯片3的外侧面,防止芯片3的插脚与电子元件插板1011脱离,进而在其中一组芯片3损坏时,只需将前连接盖102拆下,并将旋转盖1013打开,将芯片3抽出更换即可,操作更加方便,在使用时,两组散热扇6将循环风通过气孔501送入到壳体1内部,对内芯连接框101内的电子元件插板1011以及芯片3组件进行冷却,同时通过防尘框7内侧前端的防尘网702对冷却送风的灰尘进行除尘,避免灰尘导致电子元件插板1011以及芯片3损坏,还可将活动板5以及防尘框7拆下,对防尘网702上的灰尘进行清理。
本发明未详述之处,均为本领域技术人员的公知技术。
本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
- 一种基于工业机器人的开关磁阻电机伺服的组合驱动装置
- 一种工业机器人用开关磁阻电机伺服驱动装置