智能垃圾桶
文献发布时间:2023-06-19 12:25:57
技术领域
本发明涉及智能垃圾桶。
背景技术
专利文献CN106927168A公开了一种智能换袋垃圾桶,主要地,公开了装在移动机构上的收口封口装置,收口封口装置在移动机构的带动下移动到操作位置,然后收口封口装置对垃圾袋的装有垃圾的一截进行热封从而完成对垃圾的打包,同时对垃圾袋未装有垃圾的一截进行热封从而形成新一个袋底,再把两截垃圾袋切断,使得打包好的垃圾在自身重力作用下落到桶底储存。现有技术的缺陷是打包后的垃圾体积大,过于占据垃圾桶桶底空间。
发明内容
本发明旨在给出一种打包好后的垃圾占据垃圾桶空间小的智能垃圾桶。
智能垃圾桶,包括置袋机构和可横移的热封部件,置袋机构使垃圾袋竖置在垃圾桶内盛放垃圾,热封部件对盛满垃圾的垃圾袋的袋口进行横移式热封,垃圾桶内设有与热封部件同步的横向夹压装置,横向夹压装置横向夹压垃圾袋从而横向压缩袋内的垃圾。
进一步地,所述横向夹压装置包括第一夹压件和第二夹压件,第一夹压件带动热封部件同步横移。
进一步地,第一夹压件上端和/或第二夹压件上端伸出有阻挡件,阻挡件在横向夹压方向上比其所在的夹压件更靠近另一夹压件。
进一步地,横向夹压装置设有内翻边,内翻边设于第一夹压件侧边缘和/或第二夹压件侧边缘。
进一步地,包括割袋机构和出袋机构,割袋机构横移割断垃圾袋使得垃圾袋被分割成上、下两部分,其中:居下部分装有垃圾且被热封部件封口,在垃圾袋被割断后掉落到桶底;居上部分未装有垃圾且位于置袋机构内,出袋机构把居上部分从置袋机构内送出以用于盛放新的垃圾。
进一步地,热封部件具体包括上热封条和下热封条,下热封条对垃圾袋居下部分的袋口进行热封,上热封条对垃圾袋居上部分的底部进行热封从而形成袋底;割袋机构横向对准上热封条和下热封条二者之间进行切割。
进一步地,热封部件对垃圾袋进行所述横移式热封后,割袋机构进行所述横移以割断垃圾袋。
进一步地,割袋机构包括横置的刀。
进一步地,所述横向夹压装置包括第一夹压件和第二夹压件,第一夹压件带动热封部件横移,第二夹压件带动割袋机构横移。
进一步地,出袋机构具体包括抽风机,在垃圾桶口部被置袋机构及垃圾袋封住的状态下,抽风机提供负压从而把垃圾袋居上部分从置袋机构内送出。
进一步地,所述横向夹压装置包括第一夹压件和第二夹压件,第一夹压件带动热封部件横移,第二夹压件同步带动割袋机构横移;第二夹压件上开设有抽风口,抽风机对准进风口进行抽风。
有益效果在于:垃圾袋内的垃圾被横向夹压装置压缩,故体积变小,占据垃圾桶空间小。热封部件与横向夹压装置同步横移进行横移式热封,无需为热封部件单独配置驱动装置,使得智能垃圾桶内部结构紧凑。
附图说明
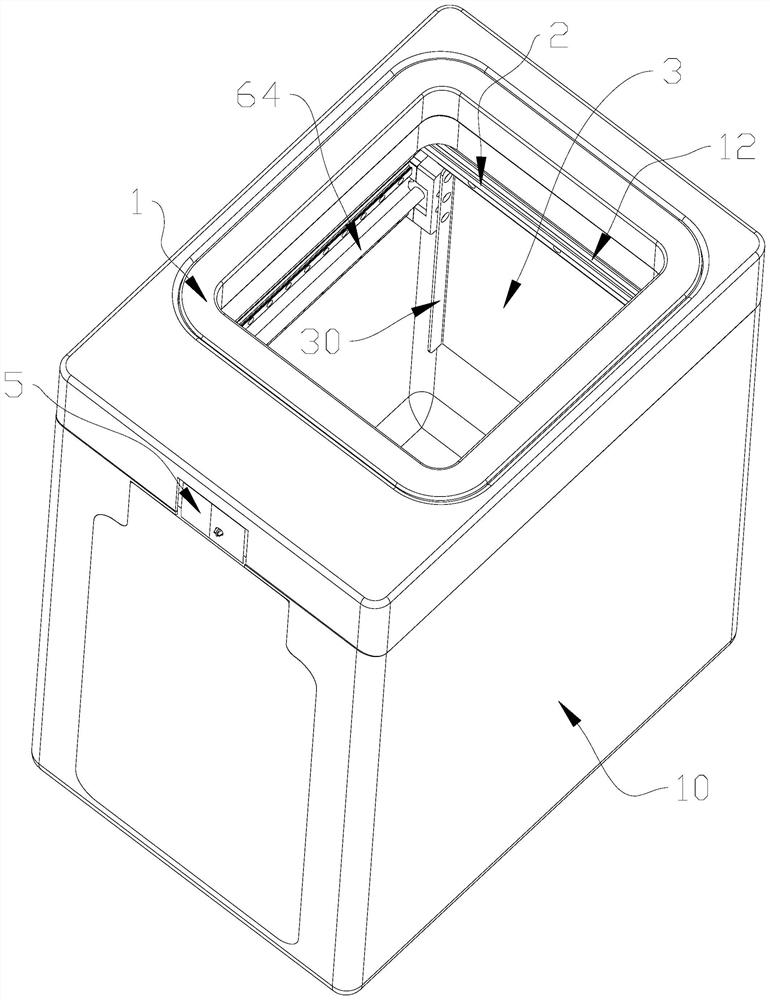
图1是智能垃圾桶的立体视图;
图2是垃圾袋的立体视图;
图3是垃圾袋被收纳在环形袋盒内的立体视图;
图4是智能垃圾桶(隐藏了外壳)的右视图;
图5是智能垃圾桶(隐藏了外壳)的后视角立体视图;
图6是智能垃圾桶(隐藏了外壳)的正视角立体视图;
图7是抽风机的安装视图;
图8是垃圾袋热封位置和切割位置的示意图;
图中:1、环形袋盒;2、下热封条;3、后夹压板;4、抽风机;5、出风管末端;6、直线模组;7、垃圾袋;8、超声波传感器;9、光电传感器;10、垃圾桶本体;11、前夹压板;12、上热封条;20、刀;30、内翻边;31、前斜挡板;32、前安装板;33、后斜挡板;34、后安装板;40、导风凸环;41、进风口;60、电机;61、第一皮带轮机构;62、第二皮带轮机构;63、第一远端齿轮;64、丝杆;65、丝母;66、第二近端齿轮;67、第一近端齿轮;68、第二远端齿轮;70、袋身;71、袋口;72、袋底;73、上热封线;74、切割线;75、封口袋;76、子袋体;77、下热封线。
具体实施方式
如图1~图3所示,垃圾桶本体10的口部设有作为置袋机构收纳垃圾袋7的环形袋盒1,垃圾袋7竖置,且其仅袋底72和袋身70下部一小截从环形袋盒1内露出,配合环形袋盒1共同封住垃圾桶本体10的口部。如图6和图7所示,垃圾桶内设有面对面的后夹压板3和前夹压板11,二者分别作为第一夹压件和第二夹压件。前夹压板11上开设进风口41,背部设有光电传感器9(见图5),进风口41前方固设有对准进风口41的抽风机4。抽风机4上方设有出风管,出风管始端对准抽风机4而出风管末端5(见图1)设在垃圾桶本体10的前部。本智能垃圾桶设有控制全部工作过程的控制器,控制器控制抽风机4启动,则智能垃圾桶内腔的空气先后经进风口41、抽风机4、出风管末端5被抽出到智能垃圾桶外,大气压把垃圾袋7从环形袋盒1内往下拉扯直到光电传感器9在前后横向上感应到垃圾袋7的袋底72,此状态下控制器接收到光电传感器9的到位信号就控制抽风机4停机,智能垃圾桶就处于垃圾袋7已装好的状态,则用户可以往智能垃圾桶内扔垃圾。在前夹压板11的前侧设有导风凸环40围住进风口41。
如图5所示,垃圾桶本体10内设有一左一右两个直线模组6,其中一个直线模组6为例,其包括丝杆64和分别套设在丝杆64两端的两个丝母65,前夹压板11和后夹压板3二者的左端分别固装在两个丝母65上。如图6所示,前夹压板11的前方固设有电机60、第一皮带轮机构61、第二皮带轮机构62,第一皮带轮机构61的第一近端齿轮67由电机60驱动而第一远端齿轮63则带动第二皮带轮机构62的第二近端齿轮66转动,第二近端齿轮66带动装在丝杆64上的第二远端齿轮68转动从而带动丝杆64转动,丝杆64两端分别设有互为反向的两段螺纹,使得两个丝母65连同两块夹压板相互靠近或相互远离。左右两个直线模组6互为对称。
如图4所示,初始状态下,前夹压板11和后夹压板3分别位于垃圾袋7的前后两侧。前夹压板11的上方固设有超声波传感器8,前夹压板11上设有对准超声波传感器8的孔(图中未画出),超声波传感器8发出的声波穿过该孔抵达垃圾袋7处,检测垃圾袋7内是否盛满垃圾,若是,则控制器接收到超声波传感器8的满载信号进而启动电机60,共同作为横向夹压装置的前夹压板11和后夹压板3在两个直线模组6的共同驱动下前后横向靠近从而横向压缩垃圾袋7内的垃圾。如图5所示,前夹压板11和后夹压板3二者的左右侧边缘均设有内翻边30以阻挡垃圾袋7内垃圾在被压缩时左右横向胀起,从而避免垃圾撑破垃圾袋7。前夹压板11上端向上伸出有前斜挡板31,后夹压板3上端向上伸出有后斜挡板33,均作为阻挡件的前斜挡板31和后斜挡板33均朝内倾斜,用前斜挡板31举例,前斜挡板31在横向夹压方向上比前夹压板11更靠近后夹压板3,故能阻挡垃圾袋7内的垃圾在被压缩时经袋口71溢出;后斜挡板33、前斜挡板31分别位于垃圾袋7的前、后两侧。与后斜挡板33上端向上伸出有后安装板34,后安装板34的前侧排列有横置的上热封条12和下热封条2,两条热封条作为热封部件朝前横移进行横移式热封;前斜挡板31上端向上伸出有前安装板32,前安装板32的后侧设有横置的刀20,作为割袋机构的刀20朝后对准两条热封条之间的空隙进行横移切割。前夹压板11和后夹压板3前后横向靠近的过程中:两条热封条推动垃圾袋7的腰部收拢,如图8所示,下热封条2沿下热封线77对垃圾袋7进行横移式热封从而使得垃圾袋7腰部往下的居下部分形成盛满垃圾的封口袋75,上热封条12沿上热封线73对垃圾袋7进行横移式热封从而使得垃圾袋7的腰部形成一个新袋底,则腰部往上的居上部分作为子袋体76。热封完成后,随着两块夹压板继续前后横向靠近,刀20沿垃圾袋7腰部的切割线74把封口袋75和子袋体76割断,使得封口袋75下落到垃圾桶本体10的桶底进行储存,压缩后的封口袋75节省桶底空间从而能够多放置几袋打包好的垃圾,减少用户清理智能垃圾桶的频率。封口袋75下落后,见图5,前夹压板11背部的光电传感器9检测不到垃圾袋7,则向控制器发出送袋信号。控制器接到送袋信号后启动作为出袋机构的抽风机4,使得子袋体76被大气压从环形袋盒1内往下扯出直到光电传感器9在前后横向上感应到子袋体76的袋底,则光电传感器9向控制器发出到位信号,接到到位信号的控制器控制抽风机4停机,此状态下用户可往智能垃圾桶内扔垃圾。
非优选地,割袋机构是对垃圾袋7进行热熔切割的热熔装置。
非优选地,垃圾袋7改为连续的多个,每个垃圾袋都有底部,故只需下热封条2对前一个垃圾袋封口,刀20即可把前后两个垃圾袋割断。
- 智能垃圾桶桶盖缓降方法、系统、智能垃圾桶和存储介质
- 一种用于智能垃圾桶的低噪音风机及其智能垃圾桶