一种考虑结构非线性的柔性飞行动力学建模方法
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及飞行器动力学技术领域,具体涉及一种考虑结构非线性的柔性飞行动力学建模方法,可以高效准确的解决高速飞行器和大展弦比无人机飞行动力学建模中的结构非线性问题及动力学分析,为飞行器后续的控制设计提供了模型依据。
背景技术
随着航空科学技术的不断进步,现代飞行器性能要求的不断提高,经典线性气动弹性理论已经不能完全满足飞行器设计的需要,非线性气动弹性问题逐渐引起了人们的重视。气动弹性问题中的非线性因素可以分为气动非线性和结构非线性两种。其中,结构非线性又可以分为分布非线性和集中非线性,分布非线性一般是由弹性变形引起,它影响整个结构;集中非线性作用于局部,在控制装置、连接件、吊舱等部位最为常见。
结构非线性因素可能会大大降低气动弹性系统的临界颤振速度,目前针对结构非线性问题常采用立方非线性模型、间隙非线性模型和迟滞非线性模型进行动力学建模,但是上述三种典型的结构非线性模型难以准确地描述气动弹性中的非线性关系,而且间隙和双线性迟滞模型的分段特性也会给研究带来不便。因此需要建立合理的考虑结构非线性的动力学模型,进而实现非线性因素对气动弹性系统稳定性、动态响应特征等的影响分析,以使飞行器在设计过程中尽可能地避免非线性因素带来的不利影响。
申请号为CN201911211566.8的中国发明专利申请公开了一种高精度亚音速固定翼飞行器非线性动力学建模方法,通过结构辨识和真实飞行科目中的飞行数据的参数辨识,建立飞行动力学模型,该方法是用于降低研发时间成本,避免使用CFD和风洞实验的飞行动力学建模方法,难以解决具量化的结构非线性因素评估和评价问题;申请号为CN202110247995.1的中国发明专利申请公开了一种基于非线性气动力降阶的弹性飞行动力学建模方法,通过非线性气动力降阶模型和刚弹耦合动力学方程对弹性飞机进行飞行动力学仿真。上述方法均对于结构非线性因素,尤其是舵面非线性因素的考虑具有一定的局限性,难以准确地描述气动弹性中的非线性关系。
发明内容
有鉴于此,本发明针对柔性飞行动力学建模中的结构非线性问题,提供了一种考虑结构非线性的柔性飞行动力学建模方法,包括以下步骤:
一种考虑结构非线性的柔性飞行动力学建模方法,包括以下步骤:
(1)确定飞行器运动学参数关系,建立飞行器运动学与动力学方程;
(2)求解机体刚体运动和弹性变形产生的广义气动力;
(3)建立舵面偏转产生的广义气动力模型,为飞行器动力学模型增加控制输入;
(4)对于已建立的飞行器动力学模型进行求解仿真,利用Runge-Kutta数值方法或谐波平衡法求解飞行器动力学模型的响应特征和稳定性。
特别地,所述步骤(1)具体为:
考虑未变形状态,与刚体飞行器固联的体轴系在惯性系的位置向量
其中,
转换矩阵:
集中质量的转动速度
节点的弹性位移包括平移和转动,假设弹性变形的广义坐标满足正交条件的自由-自由边界条件下的模态表达,设弹性变形的广义坐标为
其中,
采用准坐标系下表达的拉格朗日方程,建立动力学方程:
其中,拉格朗日算子
对于动能
其中,
对于势能
其中,
全机质量表达为
拉格朗日变量对角度和角速度求导,得到转动自由度方程:
拉格朗日变量对广义弹性坐标求导,得到飞行器弹性方程:
对参考平衡状态的飞行器,动力学方程进行小扰动线性化处理,其中参考平衡状态的平动运动参数、转动运动参数分别为常数,弹性运动参数定义为0,保留一阶扰动项,整合动力学模型并进行简化,有:
其中,
对于非保守力项中的气动力分量进一步分为:
其中
特别地,所述步骤(2)具体为:
给定t时刻运动变形,利用非定常气动力求解算法或者CFD中动网格方法,求解气动力分布矩阵P;结合弹性模态阵,获得结构所有模态阵;用
特别地,所述步骤(2)具体为:
给定t时刻运动变形,用
特别地,所述步骤(3)具体为:
考虑双线性迟滞模型,将位移上升段和位移下降段分开描述;舵面广义气动力
针对每一个舵面偏转广义自由度
采用非线性有理式进行函数曲线拟合,以统一的表达形式描述模型中的结构非线性,得到广义位移与广义力的表达式。
特别地,所述步骤(4)中,利用谐波平衡法进行模型气动弹性求解分析,推导出以颤振频率为未知数的高次代数方程,由高次代数方程解出颤振频率,求出两个方向的颤振振幅。
本发明相对于现有技术的有益效果:
(1)本发明的建模周期短,仿真计算效率高,可将机体运动和控制面运动进行单独仿真计算并引入飞行器飞行动力学仿真中。
(2)本发明通过建立飞行器动力学模型中结构非线性因素的统一表达形式,有效解决了飞行器动力学建模中的结构非线性建模问题,进而提高模型动力学分析中的合理性及准确性。
(3)本发明考虑柔性飞行动力学建模过程中的结构非线性因素,在完整的弹性飞机气动-结构耦合分析基础上,可以解决控制面铰链以及连接件之间的安装间隙、部件老化松动等情况下飞行器结构非线性动力学建模及后续动力学分析问题,从而为相关控制器设计提供指导思想,具有一定的工程应用价值。
附图说明
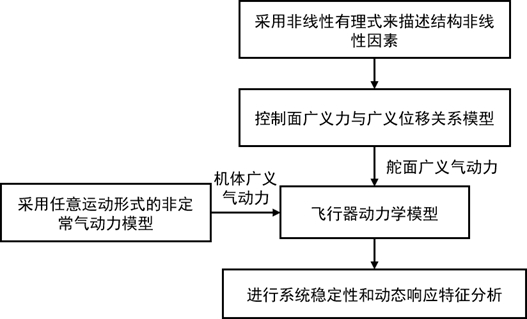
图1为动力学建模方法的流程示意图;
图2为实施例极限环震荡时间历程;
图3为含有间隙非线性机翼飞行器俯仰位移的时间响应历程;
图4为含有间隙非线性机翼飞行器无量纲沉浮位移的时间响应历程;
图5为飞行器无量纲临界颤振速度与初始角位移关系。
具体实施方式
下面结合附图和实施例对本发明的一种考虑结构非线性的柔性飞行动力学建模方法进一步详细说明。
一种考虑结构非线性的柔性飞行动力学建模方法,包括以下步骤:
(1)确定飞行器运动学参数关系,建立飞行器运动学与动力学方程。考虑未变形状态,与刚体飞行器固联的体轴系在惯性系的位置向量
其中,
转换矩阵:
集中质量的转动速度
节点的弹性位移可以表达为平移和转动,根据假设条件,可以满足正交条件的自由-自由边界条件下的模态表达,设弹性变形的广义坐标为
其中,
采用准坐标系下表达的拉格朗日方程,建立动力学方程:
其中拉格朗日算子
对于动能项,由每个集中质量
其中,
对于势能项,势能包含重力势能和弹性势能,利用线弹性假设,全机势能表达式为
其中,
利用上述表达式,全机质量表达为
拉格朗日变量对角度和角速度求导,得到转动自由度方程:
其中,
拉格朗日变量对广义弹性坐标求导,得到飞行器弹性方程:
对参考平衡状态的飞行器,动力学方程进行小扰动线性化处理,其中参考平衡状态的平动运动参数、转动运动参数分别为常数,弹性运动参数定义为0,保留一阶扰动项。整合动力学模型并进行简化,有:
其中,
对于非保守力项中的气动力分量可以进一步分为:
其中
(2) 求解机体刚体运动和弹性变形产生的广义气动力,求解基于非定常广义气动力的过程可以描述为:
给定t时刻运动变形,利用非定常气动力求解算法或者CFD中动网格方法,求解气动力分布矩阵P。结合Nastran等结构计算软件导出的弹性模态阵,获得结构所有模态阵。用
特别的,为简便计算采用Theodorsen等简单非定常气动力计算方法时,结构所有模态阵往往与气动力分布矩阵P对应,因而可以不用通过插值函数将结构模态振型插值到气动网格,即
(3) 建立舵面偏转产生的广义气动力模型,为飞行器动力学模型增加控制输入。本发明中考虑双线性迟滞模型,将位移上升段和位移下降段分开描述。舵面广义气动力
针对每一个舵面偏转广义自由度
采用非线性有理式进行函数曲线拟合,以统一的表达形式来描述模型中的结构非线性,可以给出具体的广义位移与广义力的表达式。
(4)对于已建立的飞行器动力学仿真模型,利用Runge-Kutta数值方法对其进行求解。基于飞行器动力学模型可对时间步内弹性飞行稳定性进行分析,在此基础上,加入气动力模型以对气动力响应进行分析,再加入舵面气动力模型以进行气动伺服弹性及飞行仿真分析。
特别的,利用谐波平衡法可以进行模型气动弹性求解分析,首先推导出以颤振频率为未知数的高次代数方程,由此方程解出颤振频率,然后即可求出两个方向的颤振振幅。该方法与数值积分方法相比,可以避免积分过程的累积误差,计算量较小,但是推导过程较复杂,而且不能考察初始条件对系统响应的影响。
具体实施例一
如图1所示,本实施例针对只考虑纵向平面的飞行器模型(图2),对其进行考虑结构非线性的柔性飞行动力学建模。
第一步,对飞行器进行坐标系定义,体轴系原点位于中心处,初始位置与惯性系重合,确定飞行器简化模型自由度分别为:沉浮自由度
其中,
其中,
其中,
第二步,利用Theodorsen理论求解气动力,无量纲形式的非定常气动力与力矩向量
其中,U为无量纲来流速度,
建模得到完整的以矩阵形式表达的三自由度飞行器运动方程为
其中,
其它向量具体为:
其中,
其中,
第三步,建立舵面偏转产生的广义气动力模型,增加控制输入
其中,
矩阵中各元素定义为:
所用到的参数为:
加入迟滞非线性模型,其中
实际迟滞非线性与拟合结果如图2所示。
第四步,利用数值方法求解飞行器动力学模型。在无量纲来流速度U=1时,俯仰方向含有迟滞非线性飞行器俯仰和沉浮位移的时间响应历程分别如图3和图4所示。进行飞行器颤振分析,以初始角位移为例,在
以上所述仅为本发明的具体实施方式,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。