一种智能建筑脚手架
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及脚手架技术领域,具体为一种智能建筑脚手架。
背景技术
脚手架是指施工现场为工人操作并解决垂直和水平运输而搭设的各种支架,是建筑界的通用术语,主要在建筑工地上用于外墙、内部装修或层高较高无法直接施工的地方,方便施工人员上下干活及高空作业等。
目前传统的脚手架存在着无法自动智能攀爬提升,智能化程度低的问题。因此,如何开发一种自动智能爬升的脚手架成为目前亟待解决的问题。
有鉴于此,特提出本发明。
发明内容
本发明的目的在于提供一种智能建筑脚手架,该智能建筑脚手架能实现自动智能爬升和启停,智能化程度高。
为解决上述技术问题,本发明提供了一种智能建筑脚手架,包括导轨组件、升降组件、防坠组件和智能控制平台,所述升降组件和导轨组件滑动连接,所述防坠组件和升降组件连接,所述智能控制平台包括微处理器、总控箱和多个并联的操控箱,所述微处理器和总控箱双向通讯,所述操控箱均和总控箱双向通讯,所述升降组件上设置有驱动模块以用于为升降组件提供动力,所述驱动模块和操控箱通讯连接。
进一步的,所述总控箱包括识别模块,所述识别模块和操控箱通讯连接以用于识别操控箱所属的机位。
进一步的,所述总控箱包括报警模块以用于发出报警提示。
进一步的,所述操控箱包括传感器模块,所述传感器模块和主控箱通讯连接。
进一步的,所述传感器模块和传感器连接,所述传感器包括重力传感器、陀螺仪传感器、拉力传感器、行程传感器、倾角传感器。
进一步的,所述智能控制平台还包括手持终端设备,所述总控箱通过信号接收器接收手持终端设备的信号。
进一步的,所述操控箱内设置有触摸显示屏。
进一步的,所述操控箱内设置有机械开关。
进一步的,所述机械开光包括启停开关、升降开关、急停开关和电源开关。
进一步的,所述微处理器采用以C8051F350芯片芯片为核心的电路。
与现有技术相比,本发明的有益效果在于:
本发明的智能建筑脚手架智能化程度高,通过微处理器设定的指令控制总控箱,总控箱发送控制命令至操控箱,操控箱对驱动模块进行控制,从而实现了脚手架的智能升降和启停。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
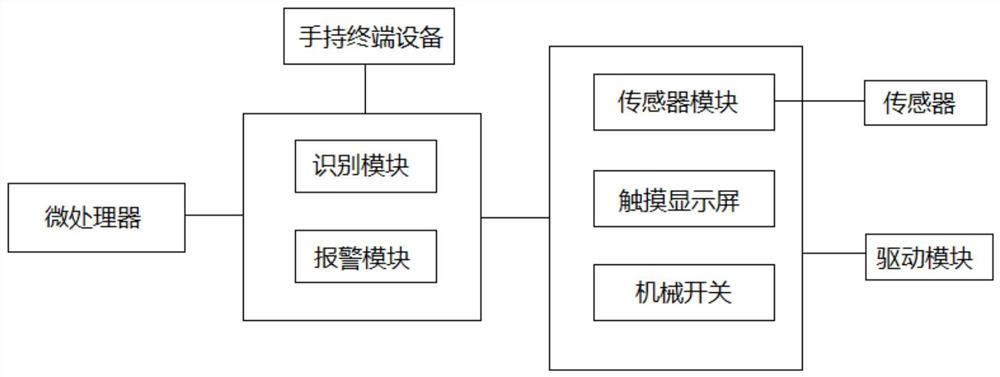
图1为本发明提出的智能建筑脚手架的框架示意图。
具体实施方式
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要理解的是,术语"中心"、"纵向"、"横向"、"长度"、"宽度"、"厚度"、"上"、"下"、"前"、"后"、"左"、"右"、"竖直"、"水平"、"顶"、"底"、"内"、"外"、"顺时针"、"逆时针"等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语"第一"、"第二"仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有"第一"、"第二"的特征可以明示或者隐含地包括一个或者更多个所述特征。在本发明的描述中,"多个"的含义是两个或两个以上,除非另有明确具体的限定。此外,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
参阅图1所示,本发明提出的一种智能建筑手脚,包括导轨组件、升降组件、防坠组件和智能控制平台,升降组件和导轨组件滑动连接,防坠组件和升降组件连接,防坠组件能起到防坠功能,降低高空坠落的危险性。智能控制平台包括微处理器、总控箱和多个并联的操控箱,微处理器和总控箱双向通讯,操控箱均和总控箱双向通讯,升降组件上设置有驱动模块以用于为升降组件提供动力,驱动模块和操控箱通讯连接。操控箱将监测到的脚手架状态信息反馈至总控箱,总控箱将接收到的反馈信息预处理后进一步反馈至微处理器,微处理器通过计算调整参数后重新分配至总控箱,总控箱再重新分配至各个操控箱,操控箱根据参数控制驱动模块,进而控制升降组件,从而实现了脚手架的智能升降和启停。
在上述方案的基础上,总控箱还包括识别模块,识别模块和操控箱通讯连接以用于识别操控箱所属的机位,通过识别模块能识别待升降的机位组别的机位。另外,总控箱还包括报警模块以用于发出报警提示,报警模块包括声光报警器、短信报警器、继电器中的一种或多种。
在上述方案的基础上,操控箱包括传感器模块,传感器模块和主控箱通讯连接,进一步的,传感器包括重力传感器、陀螺仪传感器、拉力传感器、行程传感器、倾角传感器等。通过重力传感器可以测量由于重力引起的加速度,可以计算出升降组件相对于水平面的倾斜角度,通过陀螺仪传感器现能够精确地确定升降组件的方位,通过拉力传感器可以测量提升升降组件所用的拉力,通过行程传感器可以测量升降组件升降的位移距离,通过倾角传感器可以检测出升降组件是否有倾斜。
此外,智能控制平台还包括手持终端设备,总控箱通过信号接收器接收手持终端设备的信号。操控箱内还设置有机械开关,机械开关包括启停开关、升降开关、急停开关和电源开关。
在上述方案的基础上,微处理器采用以C8051F350芯片芯片为核心的电路。
以下简要说明本发明的智能建筑脚手架的工作过程和原理。
操控箱通过传感器模块接收现场脚手架的状态信息反馈至总控箱,总控箱将接收到的反馈信息预处理后进一步反馈至微处理器,微处理器通过计算调整参数后重新分配至总控箱,总控箱再重新分配至各个操控箱,操控箱根据参数控制驱动模块,进而控制升降组件,从而实现脚手架的智能升降和启停。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。