一种导管自动拉伸贴合设备
文献发布时间:2023-06-19 13:46:35
技术领域
本发明属于导管加工技术领域,具体涉及一种导管自动拉伸贴合设备。
背景技术
在多层结构的导管制作中,常使用PTFE材料。PTFE使用温度范围较广,常压下可以长期应用于-180℃~250℃,在250℃高温下处理1000h后,其力学性能变化很小。PTFE具有很低的摩擦因数,是一种良好的减摩,自润滑材料,其静摩擦系数小于动摩擦系数,具有阻力小,运转平滑的优点。由于PTFE无极性,耐热及不吸水,因此经常被用于导管内衬。人工将超薄PTFE导管套入芯轴后,需要将超薄PTFE管均匀向两侧拉抻。使超薄PTFE管贴合到芯轴表面。在操作过程中,抻拉力不可控,出现抻拉力不足,造成超薄PTFE导管未贴合到芯轴上。出现抻拉力过大,造成超薄PTFE导管抻拉过大,超薄PTFE导管表面出现泛白现象,影响超薄PTFE导管性能。
发明内容
为了解决上述技术问题,本发明提供一种导管自动拉伸贴合设备,使导管均匀向两侧拉伸。
本发明是这样实现的,提供一种导管自动拉伸贴合设备,包括柜体、热合单元、热合运动单元、拉伸单元和控制单元,热合单元包括多组并列设置的热合组件,每组热合组件包括加热架和加热管,加热架为U型结构,包括一个竖板和两个横板,加热管中央沿轴向设有供导管通过的通孔,加热管设在加热架两个横板远离竖板的两端之间,并且在加热管的通孔上下对应的加热架上,均设有供导管通过的孔,加热架通过竖板设置在热合运动单元上,热合组件在热合运动单元上上下运动;
拉伸单元包括多组夹紧组件、竖直运动组件和水平运动组件,每组夹紧组件包括拉伸连接板和多个设置在拉伸连接板上的夹紧单元,每个夹紧单元包括推动气缸组件和夹紧气缸组件,推动气缸组件包括推动气缸,夹紧气缸组件包括夹紧气缸和夹紧爪,推动气缸固定在拉伸连接板上,夹紧气缸可移动地连接在拉伸连接板上,推动气缸的推动杆连接夹紧气缸,夹紧气缸远离推动气缸的一端设置夹紧爪,多组夹紧组件通过拉伸连接板可上下移动地连接在竖直运动组件上,竖直运动组件可水平运动地连接在水平运动组件上,拉伸单元通过水平运动组件设置在柜体内、且位于热合单元前方;
控制单元与热合单元、热合运动单元、拉伸单元连接,热合单元、热合运动单元、拉伸单元和控制单元均与柜体连接。
优选地,所述加热管包括加热管体、铜筒和温度传感器,铜筒设置在加热管体内,在铜筒的轴向设有供导管通过的通孔,温度传感器设置在铜筒上,温度传感器与所述控制单元连接;
加热管通过两个加热支柱连接在所述加热架上;在加热架两端设有供导管通过的孔的位置设有导向块,导向块上设有供导管通过的孔,且导向块上的孔的直径小于加热架和加热管上供导管通过的孔的直径;设有热合支架,加热架连接在热合支架上,热合支架连接在所述热合运动单元上。
进一步优选,所述热合单元还包括热合罩,热合罩为U型结构,包括一个长罩板和两个相同的短罩板,长罩板将多组热合组件设置所述加热管的一侧罩住,两个短罩板将两端的热合组件罩住,且设有热合罩架将热合罩连接在所述热合支架上。
进一步优选,所述推动气缸组件还包括节流阀Ⅰ、三通Ⅰ、电磁阀Ⅰ和压力表Ⅰ,节流阀Ⅰ、电磁阀Ⅰ和压力表Ⅰ分别与三通Ⅰ的三个口连接,电磁阀Ⅰ与所述推动气缸连接;所述夹紧气缸组件还包括节流阀Ⅱ、三通Ⅱ、电磁阀Ⅱ和压力表Ⅱ,节流阀Ⅱ、电磁阀Ⅱ和压力表Ⅱ分别与三通Ⅱ的三个口连接,电磁阀Ⅱ与所述夹紧气缸连接,在所述拉伸连接板上设有夹紧滑轨,夹紧滑轨上设有夹紧滑块,夹紧滑块与夹紧气缸的下端固定连接,在所述夹紧爪的内侧,设有硅胶垫。
进一步优选,所述竖直运动组件包括竖直运动模组Ⅰ、竖直运动模组Ⅱ、竖直同步盒和竖直运动驱动组件,竖直运动模组Ⅰ和竖直运动模组Ⅱ通过下端对称连接在竖直同步盒的两端,通过竖直同步盒同步竖直运动,竖直运动驱动组件设置在竖直运动模组Ⅰ的上端,驱动竖直运动模组Ⅰ和竖直运动模组Ⅱ竖直运动,每个所述拉伸连接板的两端分别可竖直移动地与竖直运动模组Ⅰ和竖直运动模组Ⅱ上的对应位置连接;所述水平运动组件包括水平运动模组Ⅰ、水平运动模组Ⅱ、水平同步盒和水平运动驱动组件,水平运动模组Ⅰ和水平运动模组Ⅱ通过一端对称连接在水平同步盒的两端,通过水平同步盒同步水平运动,水平运动驱动组件设置在水平运动模组Ⅰ的另一端,驱动水平运动模组Ⅰ和水平运动模组Ⅱ水平运动;竖直运动组件设置在拉伸框架上,拉伸框架的上下两端可水平移动地连接在水平运动模组Ⅰ和水平运动模组Ⅱ上。
进一步优选,还包括夹持组件,夹持组件固定设在所述热合运动单元的上段,夹持组件包括夹持架、夹持气缸和夹持爪,夹持气缸的数量与所述热合组件的数量相同,夹持气缸设置在夹持架上,夹持爪设置在夹持气缸的下端,夹持组件设置在热合组件的上方、且每个夹持气缸与每组热合组件的位置正对。
进一步优选,所述热合运动单元包括热合运动驱动组件和热合线性模组,热合运动驱动组件设置在热合线性模组的下端,所述热合组件可上下移动地连接在热合线性模组上,热合运动驱动组件驱动热合组件在热合线性模组上运动;在所述热合线性模组的上段和下段,分别设有一个限位传感器。
进一步优选,所述控制单元包括控制箱、电箱、触摸组件和气爪开关组件,触摸组件包括触摸屏,触摸屏通过触摸支架连接在所述柜体上,气爪开关组件包括气爪开关板和多个气爪开关,气爪开关设置在气爪开关板上,气爪开关的数量与所述热合组件的数量相同,触摸屏、气爪开关和电箱均与控制箱连接,控制箱与所述热合组件和所述热合运动单元连接。
进一步优选,在所述柜体上设有柜门,柜门内侧的柜体上设有柜门传感器,在柜门关闭时与柜门传感器接触。
与现有技术相比,本发明的优点在于:
1、实现了多层导管制作拉伸的自动化;
2、将加热、拉伸同步结合,边加热边拉伸,实现均匀拉伸,提高导管的各层的拉伸质量,提高导管的品质。
附图说明
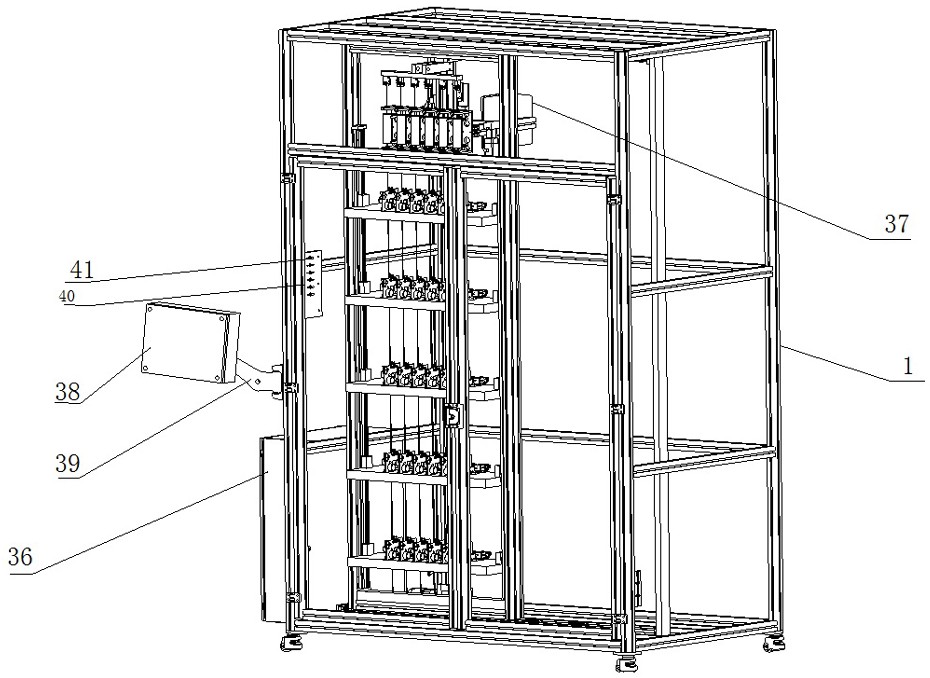
图1为本发明提供的导管自动拉伸贴合设备整体结构图;
图2为热合单元整体结构图;
图3为热合单元爆炸结构图;
图4为加热管结构图;
图5为拉伸单元整体结构图;
图6为夹紧组件立体图Ⅰ;
图7为夹紧组件立体图Ⅱ;
图8为夹紧组件立体图Ⅲ;
图9为竖直运动组件结构图;
图10为水平运动组件结构图;
图11为夹持组件结构图;
图12为热合运动单元结构图;
图13为柜体结构图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,下面结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
参考图1,图2,图3和图5,一种导管自动拉伸贴合设备,包括柜体1、热合单元、热合运动单元、拉伸单元和控制单元,热合单元包括多组并列设置的热合组件,每组热合组件包括加热架2和加热管3,加热架2为U型结构,包括一个竖板和两个横板,加热管3中央沿轴向设有供导管通过的通孔,加热管3设在加热架2两个横板远离竖板的两端之间,并且在加热管3的通孔上下对应的加热架2上,均设有供导管通过的孔,加热架2通过竖板设置在热合运动单元上,热合组件在热合运动单元上上下运动;
拉伸单元包括多组夹紧组件、竖直运动组件和水平运动组件,每组夹紧组件包括拉伸连接板7和多个设置在拉伸连接板7上的夹紧单元,每个夹紧单元包括推动气缸组件和夹紧气缸组件,推动气缸组件包括推动气缸4,夹紧气缸组件包括夹紧气缸5和夹紧爪6,推动气缸4固定在拉伸连接板7上,夹紧气缸5可移动地连接在拉伸连接板7上,推动气缸4的推动杆连接夹紧气缸5,夹紧气缸5远离推动气缸4的一端设置夹紧爪6,多组夹紧组件通过拉伸连接板7可上下移动地连接在竖直运动组件上,竖直运动组件可水平运动地连接在水平运动组件上,拉伸单元通过水平运动组件设置在柜体1内、且位于热合单元前方;
控制单元与热合单元、热合运动单元、拉伸单元连接,热合单元、热合运动单元、拉伸单元和控制单元均与柜体1连接。
在利用本发明提供的设备进行导管外层的拉伸、贴覆时,将PTFE导管套入芯轴,PTFE管长不小于芯轴长度。通过控制单元设置导管热合温度,热合单元从上往下的运动速度和运动长度。热合单元开始工作,加热管3工作,待温度达到预定值,加热管3停止工作,将准备好的导管从下向上穿过对应加热管3和加热架2,将导管上方固定,多组夹紧组件移动到热合单元正前方,夹紧气缸5在推动气缸4的推动下向前伸出,夹紧气缸5控制夹紧爪6只夹住PTFE管,通过控制单元启动热合运动单元向下运动,随着热合运动单元向下运动,拉伸单元竖直运动组件缓慢向下运动。当热合单元接近夹紧组件时,夹紧组件松开PTFE管,夹紧气缸5收回。其他夹紧组件保持夹住状态。待热合单元达到预定长度后,通过控制单元使所有单元回到原始位置,取下拉伸后的导管。
参考图4,作为加热管的一种具体结构,所述加热管3包括加热管体301、铜筒302和温度传感器303,铜筒302设置在加热管体301内,在铜筒302的轴向设有供导管通过的通孔,温度传感器303设置在铜筒302上,温度传感器303与所述控制单元连接;
加热时,给加热管体301通过电加热,然后导热给铜筒302,通过铜筒302的热辐射作用,给导管进行热合。通过温度传感器303采集加热管3的温度,传递给控制单元,由控制单元控制加热管3的温度。
为了方便安装,优化设置,加热管3通过两个加热支柱8连接在所述加热架2上;在加热架2两端设有供导管通过的孔的位置设有导向块9,导向块9上设有供导管通过的孔,且导向块9上的孔的直径小于加热架2和加热管3上供导管通过的孔的直径;设有热合支架10,加热架2连接在热合支架10上,热合支架10连接在所述热合运动单元上。
在往加热管3里插入导管的过程中,通过导向块9上的小孔给导管定位,从而使其能正确插入到加热管3中间的孔里。
为了形成保护,防止在操作过程中伤人,作为技术方案的改进,所述热合单元还包括热合罩11,热合罩11为U型结构,包括一个长罩板和两个相同的短罩板,长罩板将多组热合组件设置所述加热管3的一侧罩住,两个短罩板将两端的热合组件罩住,且设有热合罩架12将热合罩11连接在所述热合支架10上。
参考图6、图7和图8,为了对推动气缸4、夹紧气缸5进行控制,作为技术方案的改进,所述推动气缸组件还包括节流阀Ⅰ13、三通Ⅰ14、电磁阀Ⅰ15和压力表Ⅰ16,节流阀Ⅰ13、电磁阀Ⅰ15和压力表Ⅰ16分别与三通Ⅰ14的三个口连接,电磁阀Ⅰ15与所述推动气缸4连接;所述夹紧气缸组件还包括节流阀Ⅱ17、三通Ⅱ18、电磁阀Ⅱ19和压力表Ⅱ20,节流阀Ⅱ17、电磁阀Ⅱ19和压力表Ⅱ20分别与三通Ⅱ18的三个口连接,电磁阀Ⅱ19与所述夹紧气缸5连接,在所述拉伸连接板7上设有夹紧滑轨21,夹紧滑轨21上设有夹紧滑块22,夹紧滑块22与夹紧气缸5的下端固定连接,在所述夹紧爪6的内侧,设有硅胶垫23。
控制推动气缸4的气管通过节流阀Ⅰ13、三通Ⅰ14、电磁阀Ⅰ15对推动气缸4进行控制,通过压力表Ⅰ16监测压力,控制夹紧气缸5的气管通过节流阀Ⅱ17、三通Ⅱ18、电磁阀Ⅱ19对夹紧气缸5进行控制,通过压力表Ⅱ20监测压力。在推动气缸4推动夹紧气缸5运动过程中,夹紧气缸5通过夹紧滑块22在夹紧滑轨21上滑动,通过硅胶垫23的设置防止夹坏导管。为了集成设置,设有夹紧支板44固定在拉伸连接板7上,节流阀Ⅰ13、三通Ⅰ14、电磁阀Ⅰ15和压力表Ⅰ16设置在夹紧支板44的一个侧面,节流阀Ⅱ17、三通Ⅱ18、电磁阀Ⅱ19和压力表Ⅱ20设置在夹紧支板44的另一个侧面。
作为竖直运动组件和水平运动组件的具体设置方式,参考图9和图10,所述竖直运动组件包括竖直运动模组Ⅰ24、竖直运动模组Ⅱ25、竖直同步盒26和竖直运动驱动组件,竖直运动模组Ⅰ24和竖直运动模组Ⅱ25通过下端对称连接在竖直同步盒26的两端,通过竖直同步盒26同步竖直运动,竖直运动驱动组件设置在竖直运动模组Ⅰ24的上端,驱动竖直运动模组Ⅰ24和竖直运动模组Ⅱ25竖直运动,每个所述拉伸连接板7的两端分别可竖直移动地与竖直运动模组Ⅰ24和竖直运动模组Ⅱ25上的对应位置连接;
竖直运动驱动组件包括竖直电机45、竖直减速器46、竖直电机支架盒47,竖直运动模组包括竖直丝杠、竖直移动块和竖直限位杆,竖直电机45连接竖直减速器46,竖直减速器46通过竖直电机支架盒47与竖直运动模组Ⅰ24的竖直丝杠连接,带动竖直丝杠转动,竖直运动模组Ⅰ24的竖直丝杠通过竖直同步盒26带动竖直运动模组Ⅱ25的竖直丝杠转动,从而同步带动两个竖直丝杠上的竖直移动块在竖直限位杆的限位槽内竖直运动,从而带动拉伸连接板7上的多个夹紧单元做竖直运动。
所述水平运动组件包括水平运动模组Ⅰ27、水平运动模组Ⅱ28、水平同步盒29和水平运动驱动组件,水平运动模组Ⅰ27和水平运动模组Ⅱ28通过一端对称连接在水平同步盒29的两端,通过水平同步盒29同步水平运动,水平运动驱动组件设置在水平运动模组Ⅰ27的另一端,驱动水平运动模组Ⅰ27和水平运动模组Ⅱ28水平运动;竖直运动组件设置在拉伸框架30上,拉伸框架30的上下两端可水平移动地连接在水平运动模组Ⅰ27和水平运动模组Ⅱ28上。
水平运动驱动组件包括水平电机48、水平减速器49、水平电机支架盒50,水平运动模组包括水平丝杠、水平移动块和水平限位杆,水平电机48连接水平减速器49,水平减速器49通过水平电机支架盒50与水平运动模组Ⅰ27的水平丝杠连接,带动水平丝杠转动,水平运动模组Ⅰ27的水平丝杠通过水平同步盒29带动水平运动模组Ⅱ28的水平丝杠转动,从而同步带动两个水平丝杠上的水平移动块在水平限位杆的限位槽内水平运动,从而带动拉伸框架30做水平运动。
为了在热合过程中固定导管的位置,作为技术方案的改进,参考图11,还包括夹持组件,夹持组件固定设在所述热合运动单元的上段,夹持组件包括夹持架31、夹持气缸32和夹持爪33,夹持气缸32的数量与所述热合组件的数量相同,夹持气缸32设置在夹持架31上,夹持爪33设置在夹持气缸32的下端,夹持组件设置在热合组件的上方、且每个夹持气缸32与每组热合组件的位置正对。
当导管从加热管3伸出,到夹持爪33位置,夹持气缸32控制夹持爪33将导管上端抓住,实现固定。每个夹持气缸32下端优选设置三个夹持爪33。夹持气缸32与控制单元连接。
作为热合运动单元的一种具体实现方式,参考图12,所述热合运动单元包括热合运动驱动组件和热合线性模组34,热合运动驱动组件设置在热合线性模组34的下端,所述热合组件可上下移动地连接在热合线性模组34上,热合运动驱动组件驱动热合组件在热合线性模组34上运动;在所述热合线性模组34的上段和下段,分别设有一个限位传感器35。
热合运动驱动组件包括热合电机51、热合减速器52,热合线性模组34包括热合丝杠、热合滑块和热合限位杆,热合电机51通过热合减速器52带动热合丝杠转动,从而使热合滑块在热合丝杠上顺着热合限位杆上的槽上下移动。在热合组件运动到热合线性模组34的上端或下端时,通过限位传感器35将信号传递给控制单元。
具体的,为了对各个工作单元形成具体的控制,参考图1,所述控制单元包括控制箱36、电箱37、触摸组件和气爪开关组件,触摸组件包括触摸屏38,触摸屏38通过触摸支架39连接在所述柜体1上,气爪开关组件包括气爪开关板40和多个气爪开关41,气爪开关41设置在气爪开关板40上,气爪开关41的数量与所述热合组件的数量相同,触摸屏38、气爪开关41和电箱37均与控制箱36连接,控制箱36与所述热合组件和所述热合运动单元连接。
在控制箱36中设置单片机来对装置进行整体控制,通过电箱37为各个用电部件供电,通过操作人员在触摸屏38上进行参数设置,设定好的参数传递到控制箱36中,控制箱36根据设定的参数对其他部件进行控制;每个气爪开关41对应控制一个夹持气缸32的动作,根据需要热合的导管数量来决定通过气爪开关41使哪个夹持气缸32动作。
为了工作的安全性,将整体的工作部件设置在柜体1内,当柜体1闭合后,各部件开始启动,参考图13,在所述柜体1上设有柜门42,柜门42内侧的柜体1上设有柜门传感器43,在柜门42关闭时与柜门传感器43接触。