一种适用于机械臂快速拆卸的卡箍装置及其应用
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及连接技术领域,具体涉及一种适用于机械臂快速拆卸的卡箍装置及其应用。
背景技术
机械臂在拆装仪器包的过程中,需要将仪器包与相应的桁架安装位置对接并进行锁定。卡箍是对接过程中最常用的装置,但是目前没有用于机械臂快速拆装的专门装置。
类似的是在一些挂架系统中的布线卡箍,一般是通过机械加工得到,目前这种卡箍的安装与固定通常为螺钉、螺母连接,但这种方式通常拆装速度较为缓慢且对轴径的容差能力较差,部分卡箍还存在刚性太大,重量重、无法进行手动拆装,在安装时需在开多个安装孔,会削弱其强度,且部分卡箍只能从其两端安装或拆卸,无法从中间直接拆卸。对于较大管径管路所采用的法兰式连接中,除了不易拆卸,最大的弊端在于对现场安装人员有较高要求,所以安装的效率也相对较为低下。
还有另外一种连接方式为螺旋卡箍连接,这种方式无论是连接还是拆卸都只能从管道一端将卡箍取下,安装时一般需要在挂架杆上开多个安装孔,削弱了挂架杆的强度,不具备徒手拆装功能,更难用于快速拆装。
其余还有两种常见的卡箍连接形式:一种是采用两个半圆形紧固环,而另一种是采用带开口的紧固环,两种结构所采用的都是螺栓锁紧的结构形式。在采用两个半圆形紧固环的卡箍结构中,螺栓和螺母锁紧时容易卡住,而在采用带开口的紧固环的卡箍结构中,螺栓和内螺纹在拧紧或松开时容易滑动和损坏,而在拆装上两种形式都较为麻烦,比较费时,现有的自锁卡箍大多都存在着安全防护性较差,固定效果较差,容易对需要固定物品的外侧面造成损伤,使用不方便的问题。此外,多数卡箍的自锁防松性能较差,在振动条件恶劣的情况下,存在松动的风险。这些缺点都无法应用于机械臂的快速拆装。
以上提及的卡箍及其连接方式都存在着一些问题,无法应用于以机械臂为主的自动化快速拆装领域。
发明内容
本发明的目的就是为了解决上述问题而提供一种适用于机械臂快速拆卸的卡箍装置及其应用,解决机械臂快速拆装仪器的需求,解决现存卡箍自锁防松性能较差的问题,通过采用一种快速安装锁紧机构实现自锁,能够应用于机械臂的快速拆装仪器,从而更好的实现仪器与相应的桁架安装位置的对接。
本发明的目的通过以下技术方案实现:
一种适用于机械臂快速拆卸的卡箍装置,包括固定箍和活动箍,所述固定箍与活动箍的一端铰接,另一端通过拆卸连接组件可拆卸连接,
所述拆卸连接组件包括把手和紧固件,所述把手铰接在所述活动箍上,所述紧固件铰接在所述把手上,
所述紧固件的端部设有卡销,所述固定箍的端部设有与所述卡销相匹配的卡槽,所述卡销卡进所述卡槽内,通过按压所述把手实现固定箍与活动箍的快速连接。
进一步地,所述的固定箍和活动箍均为半圆环结构,所述固定箍连接固定支座。
进一步地,所述紧固件包括弧形连接杆以及设置在所述弧形连接杆前端的卡销,所述弧形连接杆可转动的安装在所述把手前半部分。
进一步地,所述弧形连接杆的曲率与所述固定箍及活动箍的曲率相同。
进一步地,所述固定箍与活动箍之间通过连接销铰接。
进一步地,所述活动箍上设有连接耳座,所述把手通过连接销铰接在所述连接耳座上。
进一步地,所述活动箍上还设有固定所述把手的卡紧定位块。
进一步地,所述固定箍和活动箍内壁及端口部设有橡胶。
进一步地,所述卡箍装置安装在仪器包上,用于仪器包与桁架横杆的快速连接或拆卸。
现有的自锁卡箍大多都存在着安全防护性较差,固定效果较差,容易对需要固定物品的外侧面造成损伤,使用不方便的问题。此外,多数卡箍的自锁防松性能较差,在振动条件恶劣的情况下,存在松动的风险。这些缺点都无法应用于机械臂的快速拆装。本发明实现了卡箍的快速安装与拆卸,利用杠杆式操作,使卡箍中偏心圆曲线与卡销间能自锁,卡箍的活动箍无须用螺钉与卡箍的固定箍固定,故操作(锁定动作、解锁动作)比较省力,使用比较方便。可以很好的用于机械臂的快速安装与拆装。利用机械臂对仪器包进行抓取,并完成对卡箍的锁定与拆卸,则完成仪器包与相应桁架安装位置的对接与锁定。
与现有技术相比,本发明提供一种适用于机械臂快速拆卸的卡箍装置,应用于仪器包与桁架横杆的快速连接或拆卸,满足机械臂快速拆装仪器的需求,解决现存卡箍自锁防松性能较差问题,通过采用一种快速安装锁紧机构实现自锁,能够应用于机械臂的快速拆装仪器,从而更好的实现仪器与相应的桁架安装位置的对接。
附图说明
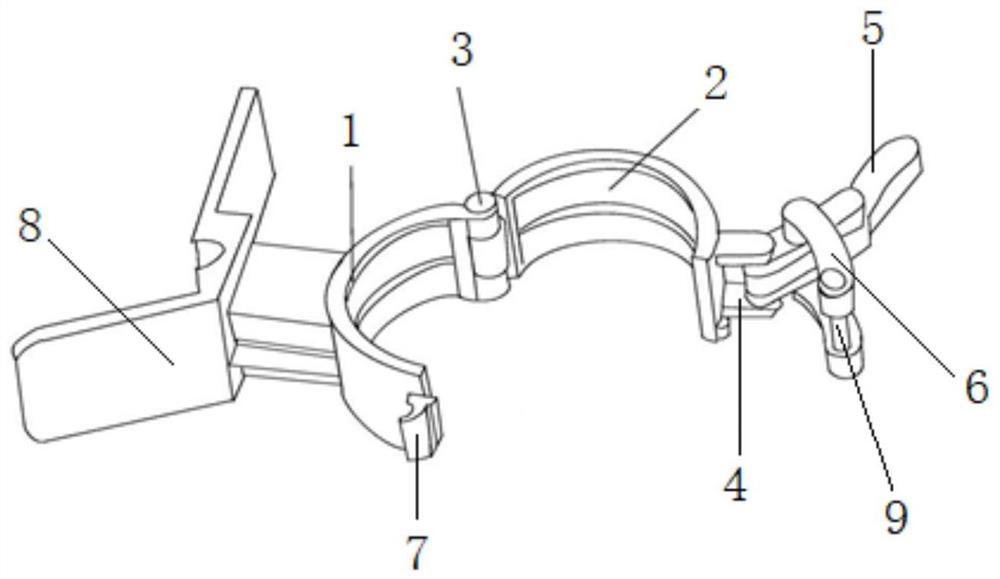
图1为本发明卡箍装置的结构示意图(打开状态);
图2为本发明卡箍装置的结构示意图(锁紧状态);
图3为卡箍装置锁紧流程图;
图4为卡箍装置解锁流程图;
图5为卡箍的工作原理分析图;
图6为仪器包的结构示意图;
图7为机械臂的结构示意图;
图8为机械臂安装仪器包的流程图;
图9为机械臂拆卸仪器包的流程图。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。
如图1、2,一种适用于机械臂快速拆卸的卡箍装置,包括固定箍1和活动箍2,固定箍1与活动箍2的一端铰接,另一端通过拆卸连接组件可拆卸连接,拆卸连接组件包括把手5和紧固件,把手5铰接在活动箍2上,紧固件铰接在把手5上,紧固件的端部设有卡销9,固定箍1的端部设有与卡销9相匹配的卡槽7,卡销9卡进卡槽7内,通过按压把手5实现固定箍1与活动箍2的快速连接。
固定箍1和活动箍2均为半圆环结构,固定箍1连接固定支座8。紧固件包括弧形连接杆6以及设置在弧形连接杆6前端的卡销9,弧形连接杆6可转动的安装在把手5前半部分。弧形连接杆6的曲率与固定箍1及活动箍2的曲率相同。固定箍1与活动箍2之间通过连接销3铰接。活动箍2上设有连接耳座4,把手5通过连接销铰接在连接耳座4上。活动箍2上还设有固定把手5的卡紧定位块10。固定箍1和活动箍2内壁及端口部设有橡胶。卡箍装置安装在仪器包上,用于仪器包与桁架横杆的快速连接或拆卸。
图3为卡箍装置锁紧流程图,当活动箍绕转动轴转动到一定位置后,卡销开始进入槽口,这时,扳动把手,锁定活动与固定箍,图4为卡箍装置解锁流程图,与锁紧过程相反。
经把手操作,使卡箍的活动箍与固定箍闭合后,锁定方向上移动距离,是由偏心圆曲率半径差产生的。设计移动距离要等于偏心圆曲线起点半径与终点半径之差。而这个距离(或偏心圆曲率半径差)控制着锁定时的夹紧力。此力不应太小,需使卡箍能承受仪器包重量及纵向振动时该处的纵向激励;也不应太大,如太大,会将桁架的杆件压裂。根据仪器包的初步重量估计,及该处的纵向激励,估算得每个卡箍(一仪器包共8个卡箍)需承受的重量约30kg。
卡箍实现快速安装与拆卸,在杠杆式槽口插件联接中杠杆体系的力点有三个,分别是机械臂的着力点、转动中心O以及卡销与曲线的接触点。因是杠杆式操作,故操作(锁定动作、解锁动作)比较省力。由于偏心圆曲线与卡销间能自锁,所以卡箍的活动箍无须用螺钉与卡箍的固定箍固定,使用比较方便,这样可以很好的用于机械臂的快速安装与拆装。
图5为卡箍的工作原理分析图,为实现卡箍的自锁装置,关键在于O1B连线超过O1A连线的位置。此外,设计中需要注意的点有:(1)P点由O1A到O1B扫过的弧长小于Q点由O2C到O2D(实际闭合过程中,Q点不能达到O2D连线的位置)扫过的弧长,这种比较是刚性位移的比较。(2)Q点由O2C到O2D连线位置过程中,卡箍箍体内壁的橡胶处于压缩过程,卡箍闭合终了时,卡箍是由橡胶提供抱紧力。
卡箍装置安装在仪器包上,用于仪器包与桁架横杆的快速连接或拆卸,仪器包共有8个卡箍,分布在仪器包的八个角上。机械臂的安装操作流程图如图8所示,机械臂的实际安装过程如图9所示,机械臂的100,300对应仪器包把手的A、B位置,进行抓取,将仪器包放至桁架的相应位置,并使分布在仪器包的八个角上的卡箍开口处皆与桁架横杆处对齐,机械臂的200、400固定住张开卡箍,完成对卡箍的锁定,完成仪器包与相应桁架安装位置的整体对接与锁定。此外,由于一个仪器包上有8个卡箍,如果一个一个安装较为费时,安装难度也会加大,本发明在装配仪器包的时候将设计一个安装导轨,然后仪器包前后卡箍进行联动设计,简化装配难度,实现一种机械臂主动拆装技术。
上述的对实施例的描述是为便于该技术领域的普通技术人员能理解和使用发明。熟悉本领域技术的人员显然可以容易地对这些实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本发明不限于上述实施例,本领域技术人员根据本发明的揭示,不脱离本发明范畴所做出的改进和修改都应该在本发明的保护范围之内。