基板搬运机器人
文献发布时间:2023-06-19 19:23:34
技术领域
该发明涉及基板搬运机器人,特别是涉及具备从臂延伸的机器人线缆的基板搬运机器人。
背景技术
以往,公知有基板搬运机器人。例如,在日本特开2013-69914号公报中公开有这样的基板搬运机器人。
在日本特开2013-69914号公报中公开有由水平多关节机器人构成的基板搬运机器人。该基板搬运机器人具备基台、与基台连接并在水平面内旋转的臂、以及与臂连接并在水平面内旋转的基板搬运机械手。
另外,虽然在日本特开2013-69914号公报中没有明确记载,但是在日本特开2013-69914号公报所记载的那样的以往的基板搬运机器人中,存在通过升降机构使臂升降的基板搬运机器人。
专利文献1:日本特开2013-69914号公报
这里,在臂升降的基板搬运机器人中,与臂的升降一起从臂延伸的机器人线缆、和引导机器人线缆的线缆引导部伴随着臂的升降而移动。在该情况下,存在以下问题点,即,伴随着机器人线缆和线缆引导部的移动,在配置有基板搬运机器人的空间(无尘室等)内,存在粉尘等扩散的情况。
发明内容
该发明是为了解决上述那样的课题而完成的,该发明的一个目的在于提供一种在配置有基板搬运机器人的空间内能够抑制粉尘等扩散的基板搬运机器人。
基于该发明的一个方面的基板搬运机器人具备:基板保持机械手;臂,使基板保持机械手移动;臂升降机构,使臂升降;大致柱状的壳体,覆盖臂升降机构;以及线缆引导部,配置机器人线缆并以追随于与臂的升降一起移动的机器人线缆的方式变形,上述机器人线缆配置于壳体的内部并且从臂延伸。
在基于该发明的一个方面的基板搬运机器人中,如上述那样,基板搬运机器人具备线缆引导部,该线缆引导部配置机器人线缆并以追随于与臂的升降一起移动的机器人线缆的方式变形,上述机器人线缆配置于壳体的内部并且从臂延伸。由此,将机器人线缆和线缆引导部配置于壳体的内部,因此即使机器人线缆和线缆引导部在壳体的内部移动,也能够抑制粉尘等在壳体的外部扩散。其结果是,能够抑制粉尘等在配置有基板搬运机器人的空间内(无尘室内)扩散。
根据本发明,如上述那样,能够抑制粉尘等在配置有基板搬运机器人的空间内扩散。
附图说明
图1是基于本发明的一个实施方式的基板搬运机器人的立体图。
图2是基于本发明的一个实施方式的基板搬运机器人的侧视图(从Y1方向侧观察的图)。
图3是基于本发明的一个实施方式的基板搬运机器人的主视图(从X1方向侧观察的图)。
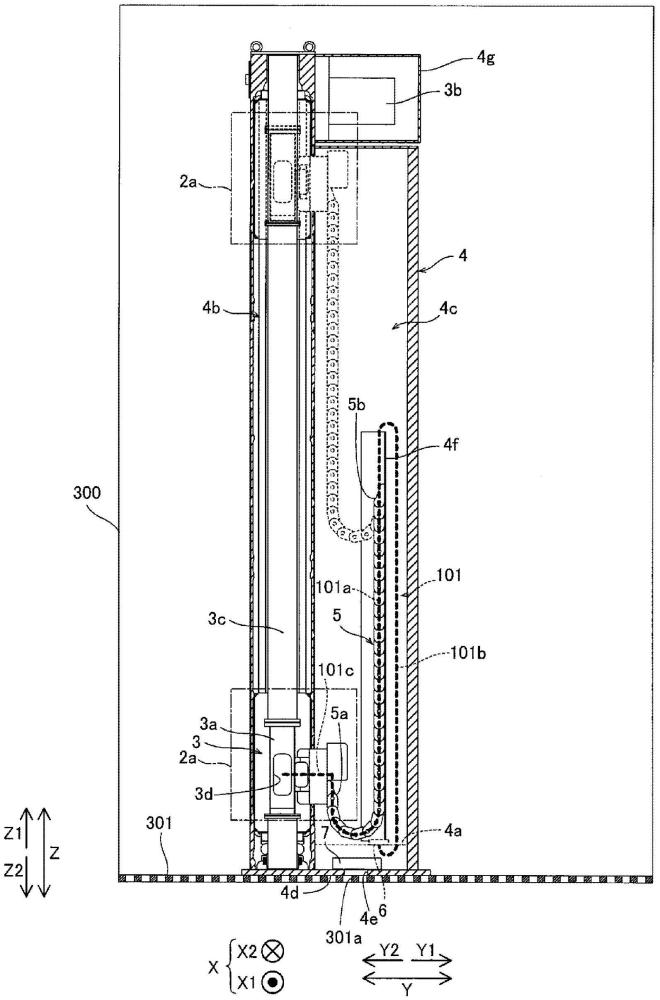
图4是基于本发明的一个实施方式的基板搬运机器人的剖视图(沿着Y-Z平面的剖视图)。
图5是沿着图3的400-400线的剖视图。
图6的(a)是表示驱动部处于壳体的上部的状态的图。图6的(b)是表示驱动部处于壳体的下方的状态的图。
图7是基于本发明的一个实施方式的基板搬运机器人的连接器的俯视图(从Z1方向侧观察的图)。
图8是沿着图3的500-500线的剖视图。
图9是基于本发明的一个实施方式的基板搬运机器人的仰视图(从X2方向侧观察的图)。
图10是基于变形例的基板搬运机器人的立体图。
具体实施方式
以下,基于附图对将本发明具体化的本发明的一个实施方式进行说明。
参照图1~图9,对基于本实施方式的基板搬运机器人100的结构进行说明。
如图1和图2所示,基板搬运机器人100具备保持基板(半导体晶圆)的基板保持机械手1、和使基板保持机械手1移动的臂2。
如图1和图2所示,臂2是水平多关节机器人臂。臂2包括第1臂201和第2臂202。第1臂201构成为能够以一个端部为转动中心而相对于后述的基座2a转动。具体而言,第1臂201的一个端部经由第1关节可转动地与基座2a连接。第2臂202构成为能够以一个端部为转动中心而相对于第1臂201转动。具体而言,第2臂202的一个端部经由第2关节可转动地与第1臂201的另一端部连接。另外,在第2臂202的另一端部,经由第3关节可转动地连接有基板保持机械手1。在第1关节、第2关节以及第3关节的各关节设置有包括作为旋转驱动的驱动源的伺服马达、检测伺服马达的输出轴的旋转位置的旋转位置传感器、以及将伺服马达的输出向关节传递的动力传递机构在内的驱动机构。
如图3~图5所示,在本实施方式中,基板搬运机器人100具备:臂升降机构3,使臂2升降;壳体4,覆盖臂升降机构3的大致柱状;以及线缆引导部5(线缆输送器(注册商标))(参照图4),配置机器人线缆101并以追随于与臂2的升降一起移动的机器人线缆101的方式变形,上述机器人线缆101配置于壳体4的内部并且从臂2延伸。
大致柱状的壳体4由金属等构成,在内部具有空间。另外,在基板搬运机器人100与机器人控制部200之间经由机器人线缆101进行信号的交换。另外,线缆引导部5具有保护在线缆引导部5配置(连接)的机器人线缆101的功能。另外,线缆引导部5具有连结有锁链那样的较小的部件的构造。
另外,在本实施方式中,如图4所示,机器人线缆101的至少一部分插入于线缆引导部5的内部。具体而言,机器人线缆101的中央部插入于线缆引导部5的内部,机器人线缆101的两端部配置于线缆引导部5的外部。
另外,在本实施方式中,线缆引导部5的一端5a是与臂2的升降一起移动的移动端,线缆引导部5的另一端5b是固定于壳体4的固定端。具体而言,机器人线缆101固定于线缆引导部5的一端5a和另一端5b。另外,线缆引导部5的一端5a固定于升降部3a。由此,线缆引导部5的一端5a和固定于线缆引导部5的一端5a的机器人线缆101与臂2的升降一起移动。另外,线缆引导部5的另一端5b固定于壳体4的内部的板状的部件4f。板状的部件4f以沿着Z方向的方式配置。
另外,在本实施方式中,机器人线缆101包括:第1线缆部分101a,配置于线缆引导部5,并与臂2的升降一起移动;和第2线缆部分101b,配置于线缆引导部5的外部,并且被固定而不与臂2的升降一起移动,沿着铅垂方向(Z方向)延伸。而且,基板搬运机器人100还具备连接器6,该连接器6设置于第2线缆部分101b的端部,并与控制基板搬运机器人100的设置于壳体4的外部的机器人控制部200(参照图3)连接。
具体而言,第1线缆部分101a是机器人线缆101的中央部。另外,第2线缆部分101b是机器人线缆101的一个端部。另外,第2线缆部分101b配置为从板状的部件4f的Y2方向侧越过上端向Y1方向侧延伸。另外,第2线缆部分101b配置为在板状的部件4f的Y1方向侧沿着板状的部件4f。另外,作为机器人线缆101的另一端部的第3线缆部分101c配置于线缆引导部5的外部。
另外,在本实施方式中,如图1和图7所示,连接器6配置于壳体4的外表面4a。具体而言,壳体4的下方侧的部分具有台阶形状,连接器6配置于作为台阶形状的上侧的面的外表面4a。另外,连接器6配置为向上方延伸。
如图1和图2所示,基板搬运机器人100还具备安装臂2的基座2a。而且,如图4所示,臂升降机构3包括安装基座2a的升降部3a、和使升降部3a升降的驱动部3b(马达)。升降部3a安装于搬运用带3c,通过驱动部3b驱动搬运用带3c,从而升降部3a升降。如图5所示,通过驱动部3b(马达)使带轮3e旋转,由此搬运用带3c移动。
搬运用带3c配置为沿着Z方向。另外,带轮3e设置于壳体4的上部和下部。搬运用带3c卷绕于带轮3e。
另外,在本实施方式中,如图4所示,驱动部3b配置于壳体4的上部。这里,如图6的(b)所示,若将驱动部3b配置于壳体4的下部,则驱动部3b成为将壳体4的内部的空气向外部排出的风扇7的风路的障碍。因此,通过将驱动部3b配置于壳体4的上部,能够抑制驱动部3b成为风扇7的风路的障碍。另外,驱动部3b安装于壳体4的外侧。另外,在壳体4设置有覆盖驱动部3b的罩盖部件4g。
另外,如图6的(a)所示,通过将驱动部3b配置于壳体4的上部,与将驱动部3b配置于壳体4的下部的情况(参照图6的(b))相比,和驱动部3b与升降部3a之间对应的搬运用带3c的长度L1比配置于下部的情况的长度L2短,并且对搬运用带3c的张力变大,因此能够抑制搬运用带3c的跳齿。即,如图6的(b)所示,若和驱动部3b与升降部3a之间对应的搬运用带3c的长度L2变长,则搬运用带3c的伸长变大,因此容易跳齿。
另外,在本实施方式中,如图3和图4所示,升降部3a从壳体4露出,并且在升降部3a设置有供从基座2a延伸的机器人线缆101插入的第1孔部3d。而且,从臂2延伸的机器人线缆101经由升降部3a的第1孔部3d配置于线缆引导部5。
另外,如图1所示,在壳体4设置有向X1方向侧突出的凸部4h。机器人线缆101的第3线缆部分101c(参照图4)配置为在凸部4h的内侧从第1空间4b(参照图8)侧向第2空间4c(参照图8)侧延伸。
另外,在本实施方式中,如图8所示,壳体4包括配置臂升降机构3的第1空间4b、和配置线缆引导部5的第2空间4c。如图4所示,第1空间4b和第2空间4c构成为向Z方向延伸。另外,第1空间4b和第2空间4c配置为在Y方向上相邻。另外,第1空间4b与第2空间4c相互连接。此外,第1空间4b是壳体4的Y2方向侧的空间。另外,第2空间4c是壳体4的Y1方向侧的空间。
另外,在本实施方式中,如图4所示,基板搬运机器人100还具备风扇7,该风扇7配置于壳体4的内部,并将壳体4的内部的空气向外部排出。
具体而言,在本实施方式中,如图4所示,基板搬运机器人100配置于无尘室300内。风扇7设置于壳体4(第2空间4c)的下部。在壳体4的下表面4d设置有供由风扇7排出的空气通过的第2孔部4e(参照图9)。构成为将由风扇7排出的空气经由第2孔部4e从设置于无尘室300的地板面301的第3孔部301a向地板面301的下方(Z2方向)排出。
[本实施方式的效果]
在本实施方式中,能够获得以下那样的效果。
在本实施方式中,如上述那样,基板搬运机器人100具备线缆引导部5,该线缆引导部5配置机器人线缆101并以追随于与臂2的升降一起移动的机器人线缆101的方式变形,上述机器人线缆101配置于壳体4的内部并且从臂2延伸。由此,将机器人线缆101和线缆引导部5配置于壳体4的内部,因此即使机器人线缆101和线缆引导部5在壳体4的内部移动,也能够抑制粉尘等在壳体4的外部扩散。其结果是,能够抑制粉尘等在配置有基板搬运机器人100的空间内(无尘室300内)扩散。
另外,在本实施方式中,如上述那样,机器人线缆101的至少一部分插入于线缆引导部5的内部。由此,由于机器人线缆101的至少一部分插入于线缆引导部5的内部,因此能够容易地使机器人线缆101伴随着线缆引导部5的移动而移动。另外,通过将机器人线缆101的至少一部分插入于线缆引导部5的内部,与将机器人线缆101全部配置于线缆引导部5的外部的情况相比,能够使壳体4内的机器人线缆101占有的空间减少,因此能够将壳体4小型化。
另外,在本实施方式中,如上述那样,线缆引导部5的一端5a是与臂2的升降一起移动的移动端,线缆引导部5的另一端5b是固定于壳体4的固定端。由此,能够在固定了线缆引导部5的另一端5b的状态下使线缆引导部5与臂2的升降一起移动(变形)。
另外,在本实施方式中,如上述那样,机器人线缆101包括:第1线缆部分101a,配置于线缆引导部5,并与臂2的升降一起移动;和第2线缆部分101b,配置于线缆引导部5的外部,被固定而不与臂2的升降一起移动,并沿着铅垂方向延伸,基板搬运机器人100还具备连接器6,该连接器6设置于第2线缆部分101b的端部,并与控制基板搬运机器人100的设置于壳体4的外部的机器人控制部200连接。由此,能够通过设置于壳体4的外部的连接器6来进行机器人线缆101、与控制基板搬运机器人100的机器人控制部200的连接,因此能够简化机器人线缆101与机器人控制部200的连接作业。
另外,在本实施方式中,如上述那样,连接器6配置于壳体4的外表面4a。由此,仅通过将机器人控制部200与配置于壳体4的外表面4a的连接器6连接,就能够容易地将机器人线缆101与机器人控制部200连接。
另外,在本实施方式中,如上述那样,还具备安装臂2的基座2a,臂升降机构3包括安装基座2a的升降部3a、和使升降部3a升降的驱动部3b。由此,通过驱动部3b使升降部3a升降,由此能够容易地使臂2升降。
另外,在本实施方式中,如上述那样,驱动部3b配置于壳体4的上部。由此,能够抑制驱动部3b对线缆引导部5的干涉。
另外,在本实施方式中,如上述那样,升降部3a从壳体4露出,并且在升降部3a设置有插入从基座2a延伸的机器人线缆101的第1孔部3d,从臂2延伸的机器人线缆101经由升降部3a的第1孔部3d配置于线缆引导部5。由此,能够容易地使经由第1孔部3d配置于线缆引导部5的机器人线缆101与升降部3a的移动一起移动。
另外,在本实施方式中,如上述那样,壳体4包括配置臂升降机构3的第1空间4b、和配置线缆引导部5的第2空间4c。由此,将臂升降机构3和线缆引导部5配置于分开的空间,因此能够抑制臂升降机构3与线缆引导部5干涉。
另外,在本实施方式中,如上述那样,还具备风扇7,该风扇7配置于壳体4的内部,并将壳体4的内部的空气向外部排出。由此,能够将在壳体4的内部产生的粉尘等向壳体4的外部排出。
另外,在本实施方式中,如上述那样,构成为:基板搬运机器人100配置于无尘室300内,风扇7设置于壳体4的下部,在壳体4的下表面4d设置有供由风扇7排出的空气通过的第2孔部4e,将由风扇7排出的空气经由第2孔部4e从设置于无尘室300的地板面301的第3孔部301a向地板面301的下方排出。由此,在将在壳体4的内部产生的粉尘等向壳体4的外部排出的情况下,能够抑制从壳体4排出的粉尘等在无尘室300的内部扩散。
[变形例]
此外,本次公开的实施方式全部的点应被认为是例示,并非是对本发明进行的限制。本发明的范围并非由上述的实施方式的说明限定,而是由权利要求书表示,还包括与权利要求书等同的意思以及在其范围内的全部变更(变形例)。
例如,在上述实施方式中,示出了应用线缆输送器(注册商标)作为线缆引导部5的例子,但是本发明并不局限于此。在本发明中,也可以应用线缆输送器(注册商标)以外的线缆引导部作为线缆引导部5。
另外,在上述实施方式中,示出了机器人线缆101的一部分插入于线缆引导部5的内部的例子,但是本发明并不局限于此。例如,也可以将机器人线缆101全部插入于线缆引导部5的内部。另外,也可以将机器人线缆101全部安装于线缆引导部5的外部。
另外,在上述实施方式中,示出了线缆引导部5的另一端5b是固定于壳体4的固定端的例子,但是本发明并不局限于此。例如,线缆引导部5的另一端5b也可以是移动端。
另外,在上述实施方式中,示出了连接器6配置于作为壳体4的台阶形状的上侧的面的外表面4a的例子,但是本发明并不局限于此。例如,连接器6也可以配置于壳体4的侧面(X方向侧的面或者Y方向侧的面)等。
另外,在上述实施方式中,示出了臂升降机构3由升降部3a、安装升降部3a的搬运用带3c、以及驱动搬运用带3c的驱动部3b(马达)构成的例子,但是本发明并不局限于此。例如,也可以通过在将马达等的旋转运动转换为直动运动的滚珠丝杠安装升降部3a而构成臂升降机构。
另外,在上述实施方式中,示出了驱动部3b配置于壳体4的上部的例子,但是本发明并不局限于此。若驱动部3b不会成为风扇7的风路的障碍,则也可以将驱动部3b配置于壳体4的下部。
另外,在上述实施方式中,示出了从臂2延伸的机器人线缆101经由升降部3a的第1孔部3d配置于线缆引导部5的例子,但是本发明并不局限于此。例如,也可以在升降部3a设置切口部来代替第1孔部3d,并将机器人线缆101经由切口部配置于线缆引导部5。
另外,在上述实施方式中,示出了风扇7设置于壳体4的下部的例子,但是本发明并不局限于此。例如,也可以将风扇7设置于壳体4的上部来将壳体4内的空气从地板面301的第3孔部301a排出。
另外,在上述实施方式中,示出了基板搬运机器人100的臂2是水平多关节机器人臂的例子,但是本发明并不局限于此。例如,也可以构成为:如基于图10所示的变形例的基板搬运机器人600那样,臂602沿着X方向直动。基板搬运机器人600构成为:臂602相对于大致柱状的壳体604沿着Z方向升降。
附图标记说明
1…基板保持机械手;2…臂;2a…基座;3…臂升降机构;3a…升降部;3b…驱动部;3d…第1孔部;4…壳体;4a…外表面;4b…第1空间;4c…第2空间;4d…下表面;4e…第2孔部;5…线缆引导部;5a…(线缆引导部的)一端;5b…(线缆引导部的)另一端;6…连接器;7…风扇;100…基板搬运机器人;101…机器人线缆;101a…第1线缆部分;101b…第2线缆部分;200…机器人控制部;300…无尘室;301…地板面;301a…第3孔部。
- 基板搬运机器人、基板搬运系统以及基板搬运方法
- 基板搬运机器人、基板搬运系统及基板搬运方法