一种基于评价指标的人在回路智能训练负载曲线优化算法
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及一种训练负载曲线优化算法,特别是一种基于评价指标的人在回路智能训练负载曲线优化算法。
背景技术
2010-2020年我国参加体育锻炼的人数明显增加,据国家统计局发布,预计到2020年我国体育产业总产值突破3万亿,经常参加锻炼的人数达到4.35亿,人均体育场地面积达到1.8平方米。随着训练人数的增加,存在一个普遍的问题是人们锻炼的目的多种多样。普通大众需要自己学习相当多的训练知识并且在私人训练员或健康教练的经验指导下,才能有效的实现目标。这种训练方式不仅对很多的健身爱好者来说是很昂贵的,而且教练只能凭借自身的经验粗略的指导,无法精准的实现基于特定目标和量化的训练方式。
针对上述情况,现有技术中已经给出过解决方案。
CN111111111A专利提出了一种健身实时监测系统及方法,实时监测系统采集用户体表的温度数据、肌肉热成像图、脸部热成像图、用户健身姿态的视频图像信息,存储到云端服务器,生成具有标准动作的标准3D人物模型和与用户当前健身动作一致的实时3D人物模型。对用户体表的温度数据、肌肉热成像图、脸部热成像图数据进行处理,计算出用户肌肉的疲劳程度,在3D模型上用不同颜色显示疲劳程度。该方法可以方便用户改正自己错误的健身动作,又可以实时了解身体肌肉的疲劳程度,避免造成损伤。
KEEP公司的手环能够通过输入人体生理参数,得到训练过程中的最佳心率大小,训练者可以在训练过程中保持这个心率大小实现最佳的训练结果。KEEP 同时可以检测人的运动角度矫正训练姿势,计算卡路里。
但是,现有技术中仍存在以下不足:
首先,目前训练者只能实现简单的健身指标,如心率,训练者能够较好的维持在某一个值。如果指标在训练的过程中是时变的,那么单靠训练者和教练也难以实现了。
其次,智能健身提出的较为复杂,更加接近人体真实情况的健身指标,譬如疲劳度、能耗、血氧含量等,训练者只能凭借自身的经验粗略的去实现,目前的智能健身系统控制回路也并没有将人包含在内,因此无法精准的实现基于健身指标的精准训练方法。
发明内容
本发明的目的是为了解决上述现有技术的不足而提供一种基于评价指标的人在回路智能训练负载曲线优化算法,其控制回路将人包含在内,可精准的实现基于时变的复杂健身指标曲线目标的训练方式,实现精准的科学的量化训练。
为了实现上述目的,本发明所设计的一种基于评价指标的人在回路智能训练负载曲线优化算法,该算法采用:
训练负载的参数化模型;
通过试验,调研和健身专家的指导,在特定训练目标下,得到针对某组健身训练动作的科学合理的训练负载曲线。训练负载曲线以训练运动相位为自变量,能够适应不同生理参数的训练者和不同的训练运动速度。根据该负载曲线,选择几个对训练效果影响较大的物理参数形成集合,通过改变参数集合,就可以生成一系列的类似的训练负载曲线,满足不同的训练目的要求和健身训练者自身体质的要求。
运动相位同步系统,实现训练负载曲线与训练者的训练周期同步,从而有效的施加预定义的训练负载;
运动相位同步系统输入训练者的关节运动参数,如关节角度,关节速度,关节力矩等,输出预测到的训练动作关节相位,根据预测出的运动关节相位施加训练负载曲线。使得在训练者训练过程中,时刻保持合理的训练负载曲线,避免受伤的同时,实现了更好的训练效果。
智能评价指标计划系统;
为精确的控制训练者的训练状态,智能评价指标计划系统根据训练者的需求,以时间为自变量,生成整个训练阶段的人体评价指标的最佳变化曲线。
生理信号测量系统;
生理信号测量系统实时检测人体的关节运动参数和肌电信号等生理参数,通过人体的生理信号评估出当前人体的评价指标。将当前人体的评价指标与智能评价指标计划系统提供的最佳评价指标变化曲线上的数值对比,输入到总控制系统。
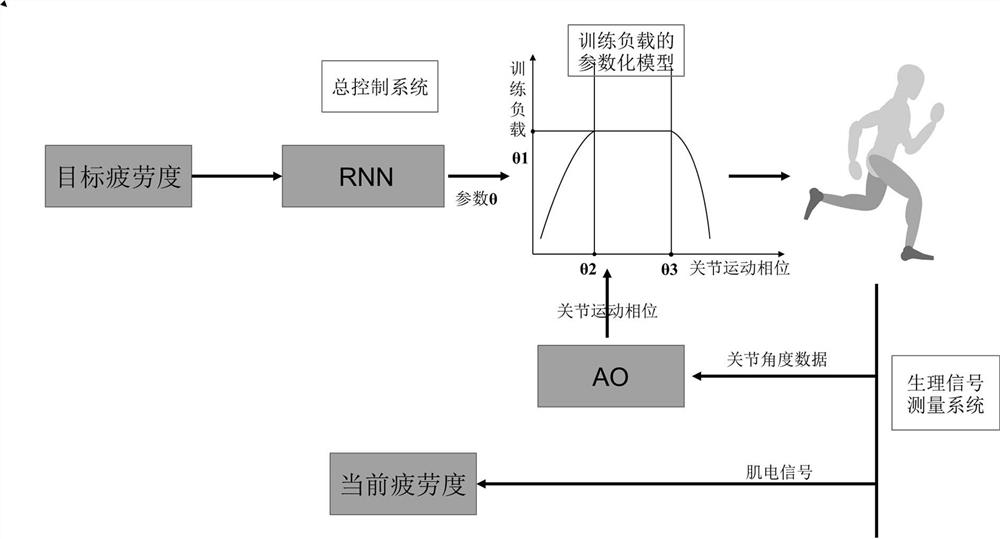
以及,总控制系统,根据人体实时评价指标和实时评价指标调节参数化的训练负载,实现人体训练过程中评价指标的精准曲线控制;
总控制系统可以据此输出符合当前人体状态的最佳的一组训练负载曲线参数,利用之前建立的训练负载的参数化模型生成完整的训练负载曲线,运动相位同步系统将负载曲线施加到训练者上。
其中,在训练者训练过程中实时监测人体的生理信号获得当前人体智能评价指标数值,并通过总控制系统控制实时改变训练负载的参数化模型,利用运动相位同步系统将模型对应的训练负载曲线应用于训练者,使得训练者的智能评价指标在训练过程中能够符合基于智能评价指标计划系统生成的评价指标最佳变化曲线。
本发明可以针对不同的训练目的(增肌、减肥塑身、缓减压力、增强体质),生成对应的最佳评价指标曲线,相比于单一常值评价指标,时变的曲线更能符合人体这个系统的复杂特性。
附图说明
图1是总系统框图;
图2是智能疲劳度计划系统图;
图3是负载调节训练平台的结构示意图。
图中:训练平台1、电机2。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所获得的所有其他实施例,都应该属于本发明保护的范围。
作为本发明的一种实施方式,在上肢往复拉伸训练运动的实例中,首先需要建立一个负载施加的小闭环。
小闭环由训练负载的参数化模型、AO算法、关节角度检测、人体组成,用于施加训练负载到人体中进行训练。针对该实例,我们可以建立一个起始时期,发力时期,收尾时期的训练负载曲线,将发力时期的负载大小作为参数θ
其中,θ是模型的参数向量,维度为1x3,t
通过修改θ参数即可调整训练负载的曲线形状和特性。模型建立完成后,需要采用运动相位同步系统将负载施加到训练者身上。运动相位同步系统可采用自适应振荡器(AO)算法。AO算法能够根据输入的运动关节曲线参数,迭代收敛获取其频率成分,从而可以获取运动关节曲线的周期大小即训练动作关节相位。AO算法如下:
其中,
通过AO算法我们可以获取输入生理信号的当前相位
其次,为实现基于生理信号评价指标(此处为疲劳度)的控制,需要建立能够反馈当前疲劳度,并基于目标疲劳度进行训练负载模型调节的大闭环控制回路,主要由总控制系统实现。首先需要智能疲劳度计划系统获取生理评价指标的最佳曲线。智能疲劳度计划系统可使用多层感知机神经模型(MLP)实现。该模型的训练数据——最佳疲劳曲线可通过采集专业的训练师或者训练者的数据获取;训练目的(增肌、减肥塑身、缓减压力、增强体质等)可分别用二进制代表,0001代表增肌,0010代表减肥塑身,0100代表减缓压力,1000代表增强体质;生理参数包括体重,身高,腰围,可直接输入模拟量;输出的最佳疲劳度曲线可用其傅里叶变换后的频率分量表示。据此,在MLP模型训练前可以建立,((训练目的,生理参数)-最佳疲劳曲线频率分量)的训练数据库。使用大数据训练后,即可得到可以应用的MLP模型。该算法需要的数据库较大,需要算力大,因此算法可搭载于服务器PC中,获取的疲劳度曲线存储于硬盘中,便于总控制系统进行调用。总控制系统使用循环神经网络神经模型(RNN)实现, RNN的输入参数不仅基于当前时刻的疲劳度,还包含以往的疲劳度,具有更加丰富的信息,控制效果更佳。该模型输入为人体当前疲劳度、疲劳度目标,输出负载曲线的一组参数。由于控制周期在几分钟以内,需要的算法算力一般,因此可搭载于树莓派中。树莓派提取服务器中的该训练者的疲劳度曲线得到目标疲劳度;同时接收生理检测系统获取的肌电信号,计算当前疲劳度。将这两个疲劳度输入到RNN网络中,得到新的训练负载参数化曲线参数θ
研究表明肌电信号同时受到力和疲劳度的影响。为解析出肌肉信号中疲劳度对其的影响,本发明使用肌电信号的幅值和频谱特征进行疲劳度识别:
电活动水平
积分肌电值
平均功率谱密度
中位频率
其中,PSD(f)是对sEMG自相关函数做傅里叶变换得到的功率谱密度函数。 EA,iENG增加,低频段能量增加高频段能量减少,则表明疲劳度增加;EA,iENG 减少,低频段能量减少高频段能量增加,则表明疲劳度减小。详细参考文献 [1,2]。
[1]Luttmann A,Matthias
[2]Cifrek M,Medved V,Tonkovi S,et al.Surface EMG based muscle fatigueevaluation in biomechanics[J].Clinical Biomechanic,2009, 24(4):327-340.
本文中所描述的具体实施例仅仅是对本发明的构思作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
- 一种基于评价指标的人在回路智能训练负载曲线优化算法
- 一种基于非对称损失与混合智能优化算法的功率曲线建模方法