一种拍摄型水下机器人
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及水下机器人领域,具体涉及一种具有能自主巡航和拍 摄的水下作业机器人水宝。
背景技术
水下机器人(ROV)诞生已久,在日常生活中却很少出现,功能 化的水下机器人更是少之又少。水下机器人或航行器的设计涉及到不 同于地面驾驶工具的推进方式和机械结构,控制方式也有所不同,其 用途正处于探索和开发阶段。
发明内容
本发明提供了一种拍摄型水下机器人,其目的在于,调整和优化 水下机器人的结构,并采取模块化组装,能够根据使用者的需求进行 功能调整,选择水下推进器、传感器、水下摄像机等工具使得该水下 机器人作业能够实现全水深、多功能的作业。
本发明是通过以下技术方案实现的:
一种拍摄型水下机器人装置,包括水下高清摄像头装置、动力推 进器装置、尾部平衡装置,所述水下高清摄像头装置包括第一法兰连 接装置、透明防水外壳、摄像头及其控制器装置,所述动力推进器装 置包括动力推进器、抗压防水外壳、控制器装置,所述尾部平衡装置 包括第二法兰连接装置、防水外壳、涡轮推进及控制器装置,所述水 下高清摄像头装置尾部设有第一连接卡口,所述动力推进器装置设有 第二连接卡口、第三连接卡口、第四连接卡口,所述尾部平衡装置设 有第五连接卡口、第六连接卡口,所述第一连接卡口设有外螺纹结构, 所述第二连接卡口设有尺寸相同的内螺纹结构,拧紧后起到输送信息的作用,第一法兰连接装置内螺纹,和所述第三连接卡口设有的尺寸 相同的外螺纹结构匹配,拧紧后起到固定所述水下高清摄像头装置和 LED灯体承载部的作用,所述第四连接卡口设有外螺纹结构,所述和 第五连接卡口设有的尺寸相同的内螺纹结构匹配,拧紧后起到固定尾 部的作用,所述第二法兰连接装置内螺纹,和所述第六连接卡口有尺 寸相同的外螺纹结构,拧紧后起到固定所述尾部平衡装置和LED灯体 承载部的作用,所述水下高清摄像头装置和所述动力推进器装置都设 有抗压防水壳体,所述水下高清摄像头装置内部设有第一主控制器, 所述动力推进器装置设有第二主控制器,所述尾部平衡装置设有第三主控制器,所述第一主控制器和第三主控制器通过所述ROV线缆连 接,所述透明防水外壳设有防水抗压透明材质,所述摄像头通过所述 防水抗压透明材质实时对水下进行测量监控、勘探,以实现所述水下 机器人的拍摄和信息采集功能,通过所述ROV线缆将信息传输到所述 第一主控制器,所述第一法兰连接装置设有两个LED灯体承载部,以 实现水下机器人拍摄的灯光补给,所述动力推进器装置包括动力推进 器,抗压防水外壳,控制器装置三个部分,所述动力推进器设有两个 垂直螺旋推进器,两个水平螺旋推进器,以实现所述水下机器人的水 平动力源和垂直动力源,所述抗压防水外壳内部有所述ROV线缆的固 定装置,所述控制器装置位于所述水样采集装置的最内层,所述控制 器装置为一空心轴式结构,所述第二主控制器位于所述控制器装置 内,所述尾部平衡装置包括所述第二法兰连接装置,防水外壳,涡轮 推进器装置,中心控制器装置,所述第二法兰连接装置设有两个LED 灯体承载部,以实现所述水下机器人诱集鱼群的功能,所述涡轮推进 器装置为所述水下机器人的尾部垂直动力源,以实现所述水下机器人 控制平衡的作用,通过ROV线缆与第二主控制器相连,所述中心控制 器装置为空心轴式结构,所述第三主控制器位于所述中心控制器装置 内,通过ROV线缆与所述第二主控制器相连,所述第二主控制器收到 外部线缆的信号后,所述第二主控制器启动工作,所述动力推进器装 置启动,同时发出信号控制第一主控制器和第三主控制器,所述高清 摄像头装置和所述尾部平衡装置启动。
优选地,所述动力推进器装置包括动力推进器、抗压防水外壳、 控制器装置,所述动力推进器设有两个垂直螺旋推进器、两个水平螺 旋推进器、一个固定垂直螺旋推进器装置,以实现所述水下机器人的 水平动力源和垂直动力源,所述垂直螺旋推进器由垂直圆锥形齿轮、 螺丝钉、垂直圆柱形小齿轮装置,所述垂直圆柱形大齿轮与所述螺旋 桨结构装置构成,所述水平螺旋推进器包括水平螺旋桨装置、水平圆 柱形大齿轮、水平圆锥形齿轮、水平螺丝钉,所述水平螺旋推进器为 T字形圆柱型结构,起到连接所述抗压防水外壳和所述垂直螺旋推进 器的作用,所述抗压防水外壳为空心圆柱形,为抗压防水材质,设有 第二连接卡口、第三连接卡口、第四连接卡口,内部有所述ROV线缆 的固定装置,所述控制器装置位于所述水样采集装置的最内层,所述 控制器装置为一空心轴式结构,所述第二主控制器位于所述控制器装 置内,所述第二主控制器收到外部线缆的信号后,所述第二主控制器启动工作,所述动力推进器装置启动。
优选地,所述垂直螺旋推进器由垂直圆锥形齿轮、螺丝钉、垂直 圆柱形小齿轮装置、垂直圆柱形大齿轮、螺旋桨结构装置构成,所述 垂直圆锥形齿轮为空心圆柱状,一方有十个锯齿形半圆锥状,中心处 有圆柱形拉伸剪切处且与与螺丝螺纹相啮合的剪切形螺纹,所述垂直 圆柱形小齿轮装置包括一个垂直圆柱形小齿轮、圆形螺丝紧固件装 置,所述垂直圆柱形小齿轮呈空心圆饼状,侧面由十个梯形锯齿圆周 阵列排列,间隔相同距离,所述圆形螺丝紧固件装置包括圆柱形螺栓 和螺母,所述垂直圆柱形大齿轮呈空心圆饼状,侧面由二十四个梯形 锯齿圆周阵列排列,间隔相同距离;所述螺旋桨结构装置由一空心圆 柱及其侧面的空心圆台构成外部结构,内部由桨毂和桨叶组成,桨叶 为花瓣形的四片,呈圆周阵列排列,所述垂直螺旋推进器通过动力源 将功率转化为推力转移给所述垂直圆锥形齿轮,随之转移给所述垂直 圆柱形小齿轮,最后通过啮合转移给所述垂直圆柱形大齿轮以实现所 述水下机器人的垂直动力源。
优选地,所述水下高清摄像头装置包括第一法兰连接装置、透明 防水外壳、摄像头及其控制器装置,所述第一法兰连接装置由螺旋法 兰盘、法兰盘、灯体承载部装置、连接件构成;所述螺旋法兰盘内部 开有贯穿的六处小安装孔和一处大安装孔,所述大安装孔与所述第三 连接卡口拧紧后起到固定所述第一法兰连接装置的作用,所述小安装 孔与所述连接件拧紧后起到固定连接件的作用,所述法兰盘圆片状, 起到固定所述灯体承载部装置作用,所述灯体承载部装置包括所述 LED灯和所述灯体承载部,以实现水下机器人拍摄的灯光补给,所述 连接件仅有一端的外螺纹,与所述螺旋法兰盘六个小安装孔内螺纹尺 寸相同,拧紧后起到固定所述螺旋法兰盘的作用,所述连接件其他部 位焊接后起到连接及固定所述法兰盘、所述灯体承载部作用,所述透 明防水外壳呈空心半胶囊状,且设有防水抗压透明材质,方便所述摄 像头实时对水下进行测量监控、勘探,开口处设有外螺纹的所述第一 连接卡口,与有内螺纹的所述第二连接卡口拧紧后起到固定所述水下 高清摄像头装置的作用,所述摄像头及其控制器装置内部设有所述第 一主控制器,所述ROV线缆和所述摄像头装置,所述第一主控制器接 收第二主控制器的信号,控制所述摄像头的启动,同时所述第一主控 制器也可接收所述摄像头的的拍摄和采集的信息,将信息传递给第二 主控制器,所述ROV线缆用于传递信息,所述摄像头装置实时对水下 进行测量监控、勘探,以实现所述水下机器人的拍摄和信息采集功能。
优选地,所述第一法兰连接装置由一个螺旋法兰盘、四个所述法 兰盘、两个灯体承载部,十二个LED灯体、六个连接件构成;所述法 兰盘为空心圆片状,相对放置,间隔相同距离,所述连接件为细长空心 直棒状,前端有外螺纹,所述第一法兰盘、第二法兰盘、第三法兰盘、 第四法兰盘上留有六个安装孔,安装孔口径与所述连接件直径相同, 连接件通过安装孔与所述四个法兰盘相连并焊接,所述螺旋法兰盘为 内螺纹空心圆片状,上开有六个安装孔,为内螺纹状圆周阵列排布, 所述螺旋法兰盘与所述连接件直径相同,连接件通过安装孔与所述螺 旋法兰盘螺旋拧紧固定,所述灯体承载部空心圆片状,上开有六个椭 圆形LED灯体安装槽,所述椭圆形LED灯体安装槽,为胶囊状,后曲 面开有安装孔,所述LED灯体安装槽后安装孔与所述连接件直径相同, 连接件穿过安装孔并焊接,所述LED灯体成半椭圆状,安装于LED灯 体安装槽上。
优选地,所述摄像头及其控制器装置包括摄像头镜片、摄像头、 摄像头盒、摄像头基座装置、控制器装置、封闭装置,所述控制器装 置包括控制器外部外壳、摄像头内部外壳,所述摄像头镜片为透明圆 片状,直径与所述摄像头盒内部橡胶凹槽尺寸相同,起到保护所述摄 像头和防水的作用,所述摄像头为数字摄像头,呈半圆状,数字摄像 头可以将视频采集设备产生的模拟视频信号转换成数字信号,进而将 信号传输给所述第一主控制器,所述摄像头盒为空心半圆形,内部前 端有所述橡胶凹槽卡座,尺寸与所述摄像头镜片相同,内部与所述摄 像头相切,用于保护所述摄像头,所述摄像头基座的外形具有类似U 形空间,该U形空间的两臂之间的距离与该摄像头盒的长度接近相 等,使该摄像头盒恰好卡入该U形空间,并且在所述基座的U形空间 的两臂与该摄像头盒的两端卡入并接触的部位,各设置有使该摄像头 盒相对于该摄像头基座转动仰角或俯角角度的枢轴和轴承结构,所述 控制器装置包括控制器外壳和所述第一主控制器,所述控制器外壳有 内外两部分,外部外壳与所述摄像头基座通过轴承结构相连,所述内 部外壳与所述摄像头基座通过轴承结构相连,封闭处有内螺纹,起到 固定所述封闭装置的作用,所述内部外壳和外部外壳之间的空隙存放 电路连接线,所述第一主控制器通过接收第二主控制器的信号,控制 所述摄像头的启动,同时所述第一主控制器也可接收所述摄像头的的 拍摄和采集的信息,将信息传递给第二主控制器,所述封闭装置为一 圆盘,该圆盘通过一螺栓固定在所述摄像头内部外壳上,起到封闭保 护第一主控制器的作用,所述圆盘中心处有开口,开口处内螺纹与螺 丝螺纹尺寸一致,同时螺丝与所述内部外壳内螺纹尺寸相同,共同拧 紧后起到固定所述内部外壳和封闭的作用。
优选地,所述水平螺旋推进器包括水平螺旋桨装置、水平圆柱形 大齿轮、水平圆锥形齿轮、水平螺丝钉,所述螺旋桨装置由一空心圆 柱及其侧面的空心圆柱构成外部结构,内部由桨毂和桨叶组成,桨叶 为花瓣形,四片桨叶呈圆周阵列排列,桨叶在水中旋转,将动力源转 动功率转化为推进力,所述水平圆柱形大齿轮呈空心圆饼状,侧面由 二十四个梯形锯齿圆周阵列排列,间隔相同距离,与所述水平圆锥形 齿轮啮合后负责将力传导给所述水平螺旋桨装置进行推进,所述水平 圆锥形齿轮为空心圆柱状,一方有十个锯齿形半圆锥状,中心处有圆 柱形拉伸剪切处与所述水平螺丝钉外螺纹相啮合的内螺纹,拧紧后起到固定和传递转动功率的作用,所述水平螺丝钉具有与所述水平圆锥 形齿轮内螺纹尺寸相同的外螺纹,拧紧后起到固定和传递转动功率的 作用,所述水平螺旋推进器通过动力源将转动功率传递给所述水平圆 锥形齿轮,通过啮合传递给所述水平圆柱形大齿轮,进而传递给所述 水平螺旋桨装置,进行水平方向的推进工作。
优选地,所述尾部平衡装置包括第二法兰连接装置、防水外壳、 涡轮推进及控制器装置,所述第二法兰连接装置内螺纹,和所述第六 连接卡口设有的尺寸相同的外螺纹结构匹配,拧紧后起到固定所述尾 部平衡装置和所述LED灯体承载部的作用,所述第二法兰连接装置设 有两个LED灯体承载部,以实现所述水下机器人诱集鱼群的功能,所 述防水外壳设有抗压防水外壳材质,同时所述第六连接卡口的外螺纹 结构,与所述第二法兰连接装置内螺纹尺寸相同,拧紧后起到固定所 述尾部平衡装置和所述LED灯体承载部的作用,所述第五连接卡口与 所述第四连接卡口拧紧后起到固定所述尾部平衡装置的作用,所述涡轮推进及控制器装置包括所述涡轮推进器装置和所述中心控制器装 置,所述涡轮推进器装置通过ROV线缆与第二主控制器相连为所述水 下机器人的尾部垂直动力源,以实现所述水下机器人控制平衡的作 用,通过ROV线缆与第二主控制器相连,所述中心控制器装置为空心 轴式结构,所述第三主控制器位于所述中心控制器装置内,通过ROV 线缆与所述第二主控制器相连。
优选地,所述涡轮推进及控制器装置包括涡轮推进器装置、中心 控制器装置,所述涡轮推进器装置包括两个垂直圆柱齿轮、两个垂直 固定器、两个水平圆柱齿轮、两个水平固定器、两个连杆开口齿轮、 一个垂直圆锥形齿轮、一个涡轮推进器装置、一个垫圈,连杆开口齿 轮包括第一连杆开口齿轮、第二连杆开口齿轮,所述垂直圆柱齿轮为 中心开口的圆饼状,侧面由十个梯形锯齿圆周阵列排列,间隔相同距 离,与所述第二连杆开口齿轮啮合后负责将力传导给所述涡轮推进器 装置进行推进和保持平衡,所述垂直固定器呈圆柱形,用于固定所述 垂直圆柱齿轮,所述水平圆柱齿轮为中心开口的圆饼状,侧面由十个梯形锯齿圆周阵列排列,间隔相同距离,与所述第一连杆开口齿轮啮 合后负责将力传导给所述第二连杆开口齿轮进行推进,所述水平固定 器呈圆柱形,用于固定所述水平圆柱齿轮,所述连杆开口齿轮包括所 述第一连杆开口齿轮和所述第二连杆开口齿轮,所述连杆开口齿轮呈 圆饼状,中心处有连杆开口,所述第一连杆开口齿轮通过连杆将动力 源将转动功率传递给两个水平圆柱齿轮进行之后推进,所述垂直圆锥 形齿轮为空心圆柱状,中心处有连杆开口,一方有八个锯齿形的半圆 锥状,通过与所述水平圆柱齿轮啮合将推进力从所述第二水平圆柱齿 轮转移给所述涡轮推进器装置,所述涡轮推进器装置由螺旋桨装置、螺旋桨盖帽组成,所述螺旋桨装置一空心圆柱构成外部结构,内部由 桨毂和桨叶及中心一端是外螺纹组成一端是连杆,桨叶为花瓣形,十 二片桨叶呈圆周阵列排列,桨叶在水中旋转,将动力源转动功率转化 为推进力,所述螺旋桨盖帽为半圆形,中心内部有未贯穿内螺纹,尺 寸与所述螺旋桨装置外螺纹相同,拧紧后起到保护的作用。
本发明搭载水下摄像头、LED灯,在水下工作照片采集采用水下 摄像头实现,LED灯进行水下鱼类诱集鱼群以及灯光补偿,结合此两 种装置的独特工作优势构成检测拍摄系统,实现水下地质勘探,鱼群 拍摄等功能。具体来说具有如下有益效果:
(1)胶囊状外形加上支架可使其在水中受压相同,适用于全水 深作业。
(2)搭载水下摄像头可用于水下工作照片采集地质勘探。
(3)搭载LED灯可用于水下鱼类诱集鱼群以及灯光补偿。
(4)该装置的模块化结构可根据不同需求,搭载多种不同类型 的模块,如各种传感器及自身运动姿态模块等各种其他功能模块。
(5)该装置可按照既定的路线,实现自主巡航。
(6)搭载超声波传感器和红外线传感器,可实现自动避障功能。
(7)采用线缆连接水下机器人,该连接方式经济实惠,又能实 现数据实时传输和能量补充,提高续航能力和寿命,最重要的是通过 线缆实现水下机器人的释放与回收,确保了安全性。
附图说明
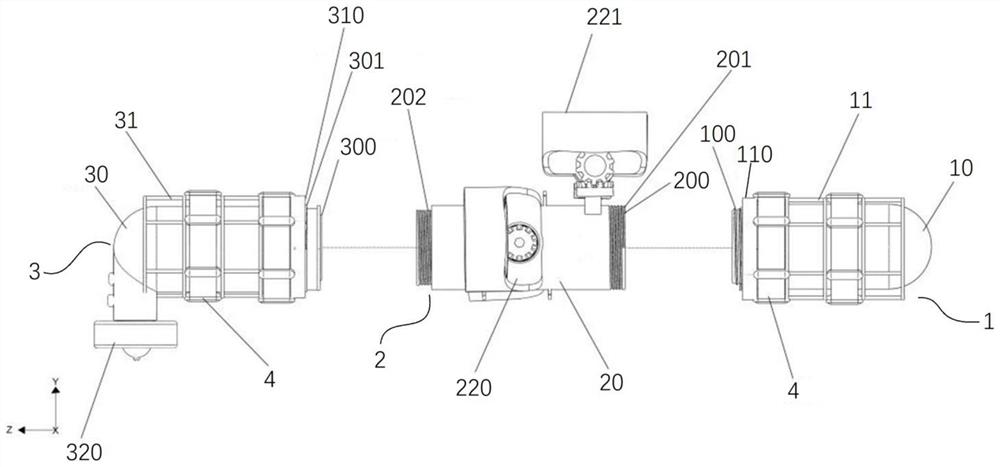
图1为本发明整体结构示意图。
图2为本发明中动力推进器装置的结构示意图。
图3为本发明中垂直螺旋推进器的结构示意图。
图4为本发明中水下高清摄像头装置的结构示意图。
图5为本发明中第一法兰连接装置的结构示意图。
图6为本发明中摄像头及其控制器装置的结构示意图。
图7为本发明中水平螺旋推进器的结构示意图。
图8为本发明中尾部平衡装置的结构示意图。
图9为本发明中涡轮推进及控制器装置的结构示意图。
图中各符号:水下高清摄像头装置1;透明防水外壳10;第一连 接卡扣100;第一法兰连接装置11;第一法兰连接装置内螺纹110; 摄像头及其控制器装置12;摄像头镜片120;摄像头121;摄像头盒 122;摄像头基座装置123;摄像头基座1230;控制器外部外壳1240;摄像头内部外壳1241;封闭装置125;动力推进器装置2;抗压防水 外壳20;第二连接卡扣200;第三连接卡扣201;第四连接卡扣202; 控制器装置21;水平螺旋推进器220;垂直螺旋推进器221;垂直圆 锥形齿轮2210、螺丝钉22100、垂直圆柱形小齿轮2212、垂直圆柱 形大齿轮2211、螺旋桨结构装置2213;固定垂直螺旋推进器装置222; 尾部平衡装置3;防水外壳30;第五连接卡口300、第六连接卡口301; 第二法兰连接装置31;第二法兰连接装置内螺纹310;涡轮推进及控 制器装置32;涡轮推进器装置320;中心控制器装置321;垂直固定 器3210;垂直圆柱齿轮3211;水平固定器3212;第一连杆开口齿轮 3213;水平圆柱齿轮3214;第二连杆开口齿轮3215;垫圈3216;LED 灯体4。
具体实施方式
下面结合附图对本发明的实施例作详细说明:本实施例在以本发 明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作 过程,但本发明的保护范围不限于下述的实施例。
如图1、4、5、6所示,包括水下高清摄像头装置1、动力推进 器装置2、尾部平衡装置3,水下高清摄像头装置1包括第一法兰连 接装置11、透明防水外壳10、摄像头及其控制器装置12,
动力推进器装置2包括动力推进器、抗压防水外壳20、控制器 装置21,
尾部平衡装置包括第二法兰连接装置31、防水外壳30、涡轮推 进及控制器装置32,水下高清摄像头装置尾部1设有第一连接卡口 100,动力推进器装置2设有第二连接卡口200、第三连接卡口201、 第四连接卡口202,尾部平衡装置3设有第五连接卡口300、第六连 接卡口301,第一连接卡口100设有外螺纹结构,第二连接卡口200 设有尺寸相同的内螺纹结构,拧紧后起到输送信息的作用,第一法兰 连接装置内螺纹110,和第三连接卡口201设有的尺寸相同的外螺纹 结构匹配,拧紧后起到固定水下高清摄像头装置1和LED灯体4承载 部的作用,第四连接卡口202设有外螺纹结构,和第五连接卡口300 设有的尺寸相同的内螺纹结构匹配,拧紧后起到固定尾部的作用,第 二法兰连接装置内螺纹310,和第六连接卡口301有尺寸相同的外螺 纹结构,拧紧后起到固定尾部平衡装置3和LED灯体4承载部的作用, 水下高清摄像头装置1和动力推进器装置2都设有抗压防水壳体,水 下高清摄像头装置1内部设有第一主控制器,动力推进器装置2设有 第二主控制器,尾部平衡装置3设有第三主控制器,第一主控制器和 第三主控制器通过ROV线缆连接,透明防水外壳10设有防水抗压透 明材质,摄像头通过防水抗压透明材质实时对水下进行测量监控、勘 探,以实现水下机器人的拍摄和信息采集功能,通过所述ROV线缆将 信息传输到所述第一主控制器,第一法兰连接装置11设有两个LED 灯体4承载部,以实现水下机器人拍摄的灯光补给,动力推进器装置 2包括动力推进器,抗压防水外壳20,控制器装置21三个部分,动 力推进器设有两个垂直螺旋推进器221,两个水平螺旋推进器220, 以实现所述水下机器人的水平动力源和垂直动力源,抗压防水外壳 20内部有所述ROV线缆的固定装置,控制器装置21位于水样采集装 置的最内层,控制器装置21为一空心轴式结构,第二主控制器位于 控制器装置21内,尾部平衡装置3包括所述第二法兰连接装置31, 防水外壳30,涡轮推进器装置320,中心控制器装置321,第二法兰 连接装置31设有两个LED灯体4承载部,以实现所述水下机器人诱 集鱼群的功能,涡轮推进器装置320为水下机器人的尾部垂直动力 源,以实现水下机器人控制平衡的作用,通过ROV线缆与第二主控制 器相连,321中心控制器装置为空心轴式结构,第三主控制器位于中 心控制器装置321内,通过ROV线缆与第二主控制器相连,第二主控 制器收到外部线缆的信号后,第二主控制器启动工作,动力推进器装 置2启动,同时发出信号控制第一主控制器和第三主控制器,水下高 清摄像头装置1和尾部平衡装置3启动。
水下高清摄像头装置1包括第一法兰连接装置11、透明防水外 壳10、摄像头及其控制器装置12,第一法兰连接装置11由螺旋法兰 盘、法兰盘、灯体承载部装置、连接件构成;螺旋法兰盘内部开有贯 穿的六处小安装孔和一处大安装孔,大安装孔与第三连接卡口拧紧后 起到固定第一法兰连接装置11的作用,小安装孔与连接件拧紧后起 到固定连接件的作用,法兰盘圆片状,起到固定灯体承载部装置作用, 灯体承载部装置包括所述LED灯和所述灯体承载部,以实现水下机器 人拍摄的灯光补给,所述连接件仅有一端的外螺纹,与所述螺旋法兰 盘六个小安装孔内螺纹尺寸相同,拧紧后起到固定所述螺旋法兰盘的 作用,连接件其他部位焊接后起到连接及固定所述法兰盘、灯体承载 部作用,透明防水外壳10呈空心半胶囊状,且设有防水抗压透明材 质,方便所述摄像头实时对水下进行测量监控、勘探,开口处设有外 螺纹的第一连接卡口100,与有内螺纹的第二连接卡口200拧紧后起 到固定水下高清摄像头装置1的作用,摄像头及其控制器装置12内 部设有第一主控制器,ROV线缆和所述摄像头装置,第一主控制器接 收第二主控制器的信号,控制摄像头的启动,同时第一主控制器也可 接收所述摄像头的的拍摄和采集的信息,将信息传递给第二主控制 器,ROV线缆用于传递信息,摄像头装置实时对水下进行测量监控、 勘探,以实现所述水下机器人的拍摄和信息采集功能。
第一法兰连接装置11由一个螺旋法兰盘112、四个法兰盘110、 两个灯体承载部111,十二个LED灯体4、六个连接件113构成;法 兰盘110为空心圆片状,相对放置,间隔相同距离,连接件113为细长 空心直棒状,前端有外螺纹,第一法兰盘、第二法兰盘、第三法兰盘、 第四法兰盘上留有六个安装孔,安装孔口径与所述连接件直径相同, 连接件113通过安装孔与四个法兰盘相连并焊接,螺旋法兰盘112为 内螺纹空心圆片状,上开有六个安装孔,为内螺纹状圆周阵列排布, 螺旋法兰盘112与连接件113直径相同,连接件113通过安装孔与螺 旋法兰盘112螺旋拧紧固定,灯体承载部111空心圆片状,上开有六 个椭圆形LED灯体安装槽,椭圆形LED灯安装槽,为胶囊状,后曲面 开有安装孔,LED灯体安装槽后安装孔与连接件113直径相同,连接 件113穿过安装孔并焊接,LED灯体成半椭圆状,安装于LED灯体安 装槽上。
摄像头及其控制器装置12包括摄像头镜片120、摄像头121、摄 像头盒122、摄像头基座装置123、控制器装置、封闭装置125,控 制器装置包括控制器外部外壳1240、摄像头内部外壳1241,摄像头 镜片120为透明圆片状,直径与摄像头盒122内部橡胶凹槽尺寸相同,起到保护所述摄像头和防水的作用,摄像头121为数字摄像头,呈半 圆状,数字摄像头可以将视频采集设备产生的模拟视频信号转换成数 字信号,进而将信号传输给所述第一主控制器,摄像头盒122为空心 半圆形,内部前端有橡胶凹槽卡座,尺寸与摄像头镜片120相同,内 部与摄像头121相切,用于保护所述摄像头,摄像头基座1230的外 形具有类似U形空间,该U形空间的两臂之间的距离与该摄像头盒 122的长度接近相等,使该摄像头盒122恰好卡入该U形空间,并且 在基座的U形空间的两臂与该摄像头盒122的两端卡入并接触的部 位,各设置有使该摄像头盒122相对于该摄像头基座1230转动仰角 或俯角角度的枢轴和轴承结构,控制器装置包括控制器外壳和第一主 控制器,所述控制器外壳有内外两部分,外部外壳与所述摄像头基座 1230通过轴承结构相连,内部外壳与摄像头基座1230通过轴承结构 相连,封闭处有内螺纹,起到固定封闭装置125的作用,内部外壳和 外部外壳分别为控制器外部外壳1240、摄像头内部外壳1241,控制 器外部外壳1240、摄像头内部外壳1241之间的空隙存放电路连接线, 第一主控制器通过接收第二主控制器的信号,控制摄像头121的启 动,同时第一主控制器也可接收摄像头121的拍摄和采集的信息,将 信息传递给第二主控制器,封闭装置125为一圆盘,该圆盘通过一螺 栓固定在所述摄像头内部外壳1241上,起到封闭保护第一主控制器 的作用,圆盘中心处有开口,开口处内螺纹与螺丝螺纹尺寸一致,同 时螺丝与内部外壳内螺纹尺寸相同,共同拧紧后起到固定所述内部外 壳和封闭的作用。
如图2、3、7所示,动力推进器装置2包括动力推进器、抗压防 水外壳20、控制器装置21,动力推进器设有两个垂直螺旋推进器221、 两个水平螺旋推进器220、一个固定垂直螺旋推进器装置222,以实 现水下机器人的水平动力源和垂直动力源,垂直螺旋推进器221由垂 直圆锥形齿轮2210、螺丝钉22142、垂直圆柱形小齿轮装置2212, 垂直圆柱形大齿轮2211与螺旋桨结构装置2213构成,水平螺旋推进 器220包括水平螺旋桨装置、水平圆柱形大齿轮、水平圆锥形齿轮、 水平螺丝钉,水平螺旋推进器220为T字形圆柱型结构,起到连接抗 压防水外壳20和垂直螺旋推进器221的作用,抗压防水外壳20为空 心圆柱形,为抗压防水材质,设有第二连接卡口200、第三连接卡口 201、第四连接卡口202部有ROV线缆的固定装置,控制器装置位于 水样采集装置的最内层,控制器装置为一空心轴式结构,第二主控制 器位于所述控制器装置内,第二主控制器收到外部线缆的信号后,第 二主控制器启动工作,动力推进器装置启动。
垂直螺旋推进器221由垂直圆锥形齿轮2210、螺丝钉22100、垂 直圆柱形小齿轮2212、垂直圆柱形大齿轮2211、螺旋桨结构装置2213 构成,垂直圆锥形齿轮2210为空心圆柱状,一方有十个锯齿形半圆 锥状,中心处有圆柱形拉伸剪切处且与与螺丝螺纹相啮合的剪切形螺 纹,垂直圆柱形小齿轮2212包括一个垂直圆柱形小齿轮、圆形螺丝 紧固件装置,垂直圆柱形小齿轮2212呈空心圆饼状,侧面由十个梯 形锯齿圆周阵列排列,间隔相同距离,圆形螺丝紧固件装置2214包 括圆柱形螺栓22141和圆柱形螺母22140,垂直圆柱形大齿轮2211 呈空心圆饼状,侧面由二十四个梯形锯齿圆周阵列排列,间隔相同距 离;螺旋桨结构装置2213由一空心圆柱及其侧面的空心圆台构成外 部结构,内部由桨毂和桨叶组成,桨叶为花瓣形的四片,呈圆周阵列 排列,垂直螺旋推进器通过动力源将功率转化为推力转移给垂直圆锥 形齿轮2210,随之转移给垂直圆柱形小齿轮2212,最后通过啮合转 移给垂直圆柱形大齿轮2211以实现水下机器人的垂直动力源。
水平螺旋推进器220包括水平螺旋桨装置、水平圆柱形大齿轮、 水平圆锥形齿轮、水平螺丝钉,螺旋桨装置由一空心圆柱及其侧面的 空心圆柱构成外部结构,内部由桨毂和桨叶组成,桨叶为花瓣形,四 片桨叶呈圆周阵列排列,桨叶在水中旋转,将动力源转动功率转化为 推进力,所述水平圆柱形大齿轮呈空心圆饼状,侧面由二十四个梯形 锯齿圆周阵列排列,间隔相同距离所述水平圆锥形齿轮啮合后负责将 力传导给所述水平螺旋桨装置进行推进,水平圆锥形齿轮为空心圆柱 状,一方有十个锯齿形半圆锥状,中心处有圆柱形拉伸剪切处与所述 水平螺丝钉外螺纹相啮合的内螺纹,拧紧后起到固定和传递转动功率的作用,所述水平螺丝钉具有与所述水平圆锥形齿轮内螺纹尺寸相同 的外螺纹,拧紧后起到固定和传递转动功率的作用,所述水平螺旋推 进器通过动力源将转动功率传递给所述水平圆锥形齿轮,通过啮合传 递给所述水平圆柱形大齿轮,进而传递给所述水平螺旋桨装置,进行 水平方向的推进工作。
如图8、9所示,尾部平衡装置3包括第二法兰连接装置31、防 水外壳30、涡轮推进及控制器装置32,第二法兰连接装置内螺纹310, 和第六连接卡口301设有尺寸相同的外螺纹结构匹配,拧紧后起到固 定尾部平衡装置3和LED灯体4承载部的作用,第二法兰连接装置 31设有两个LED灯体4承载部,以实现所述水下机器人诱集鱼群的 功能,防水外壳30设有抗压防水外壳材质,同时第六连接卡口301 的外螺纹结构,与第二法兰连接装置内螺纹310尺寸相同,拧紧后起 到固定尾部平衡装置3和LED灯体4承载部的作用,第五连接卡口300与第四连接卡口202拧紧后起到固定尾部平衡装置3的作用,涡 轮推进及控制器装置32包括涡轮推进器装置320和中心控制器装置 321,涡轮推进器装置320通过ROV线缆与第二主控制器相连为水下 机器人的尾部垂直动力源,以实现所述水下机器人控制平衡的作用,通过ROV线缆与第二主控制器相连,中心控制器装置321为空心轴式 结构,第三主控制器位于中心控制器装置321内,通过ROV线缆与所 述第二主控制器相连。
涡轮推进及控制器装置32包括涡轮推进器装置320、中心控制 器装置321,涡轮推进器装置320包括两个垂直圆柱齿轮3211、两个 垂直固定器3210、两个水平圆柱齿轮3214、两个水平固定器3212、 连杆开口齿轮、一个垂直圆锥形齿轮、一个垫圈3217,所述连杆开口齿轮呈圆饼状,中心处有连杆开口,第一连杆开口齿轮3213、第 二连杆开口齿轮3215、
垂直圆柱齿轮3211为中心开口的圆饼状,侧面由十个梯形锯齿 圆周阵列排列,间隔相同距离,与第二连杆开口齿轮3215啮合后负 责将力传导给所述涡轮推进器装置进行推进和保持平衡,垂直固定器 3210呈圆柱形,用于固定垂直圆柱齿轮3211,水平圆柱齿轮3214为 中心开口的圆饼状,侧面由十个梯形锯齿圆周阵列排列,间隔相同距 离,与第一连杆开口齿轮3213啮合后负责将力传导给所述第二连杆 开口齿轮3215进行推进,水平固定器3212呈圆柱形,用于固定水平 圆柱齿轮3214,第一连杆开口齿轮3213通过连杆将动力源将转动功 率传递给两个水平圆柱齿轮3214进行之后推进,垂直圆锥形齿轮为 空心圆柱状,中心处有连杆开口,一方有八个锯齿形的半圆锥状,通 过与水平圆柱齿轮3214啮合将推进力从第二水平圆柱齿轮转移给所 述涡轮推进器装置,涡轮推进器装置320由螺旋桨装置3201、螺旋 桨盖帽3200组成,螺旋桨装置3201一空心圆柱构成外部结构,内部 由桨毂和桨叶及中心一端是外螺纹组成一端是连杆,桨叶为花瓣形, 十二片桨叶呈圆周阵列排列,桨叶在水中旋转,将动力源转动功率转 化为推进力,所述螺旋桨盖帽3200为半圆形,中心内部有未贯穿内 螺纹,尺寸与螺旋桨装置3201外螺纹相同,拧紧后起到保护的作用。
以上显示和描述了本发明的基本原理和主要特征和本发明的优 点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上 述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明 精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改 进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权 利要求书及其等效物界定。
- 一种拍摄型水下机器人
- 一种水下巡航拍摄机器人