一种基于激光传感器阵列的绝缘子检测定位方法
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及一种基于激光传感器阵列的绝缘子检测定位方法,属于电力系统运维领域。
背景技术
绝缘子在电力系统和电气设备中应用十分广泛,按照绝缘和连接形式的不同,绝缘子可分为狭义绝缘子、瓷套和套管。绝缘子清扫是变电站运维工作的重要一环。瓷套作为绝缘子的一种,是高压电气设备的外绝缘部件,保持其清洁状态尤为重要。传统的绝缘子清扫方式有人工登高清扫和人工地面清扫刷清扫两种,人工除污方式普遍存在着清洗效率低、难度大、除污质量对人员的依赖性大,清洗质量一致性不高,工作人员安全难以得到保障等缺点。因此在未来,使用机器人进行清扫的方式将变得愈加需要,其可以很好的适应变电站现场复杂的环境,极大的提升绝缘子清扫装置的自动化水平,有利于后续智能运检的推进和发展。
绝缘子清扫机器人在清扫过程中对绝缘子进行检测定位时,由于绝缘子分布场景复杂,使得机器视觉运算量过大,现有清扫机器人不能满足其运算要求,而且在清扫中还需要严格把握距离,导致机器人不能实现对绝缘子的快速检测定位。
发明内容
发明目的:本发明的目的在于提供一种基于激光传感器阵列的绝缘子检测定位方法,以解决现有绝缘子清扫机器人由于绝缘子所处物理、电磁环境复杂,机器视觉运算量过大,导致不能实现对绝缘子快速检测定位的问题。
技术方案:本发明提供一种基于激光传感器阵列的绝缘子检测定位方法,其特征在于,所述激光传感器阵列安装于“十”字形刚体轴上且随“十”字形刚体轴的移动而变化,所述激光传感器阵列由五个水平安装且朝向相同的激光传感器组成,其中一个位于“十”字形刚体轴中心处,另外四个两两呈中心对称分布在“十”字形刚体轴的竖直刚体轴和水平刚体轴上,竖直分布的两个激光传感器与中心处激光传感器的高度差为绝缘子相邻最大半径伞裙间距的整数倍,水平分布的两个激光传感器与中心处激光传感器的距离小于绝缘子最小半径,所述方法包括:
基于竖直分布的两个激光传感器和中心处激光传感器,检测待测物体侧面是否具有竖直柱状绝缘子伞裙半径的周期性特征,根据检测结果对绝缘子进行初步定位;
基于竖直分布的两个激光传感器和中心处激光传感器,对初步定位的物体检测其侧面是否同时具有绝缘子伞裙的周期性和波动性特征,根据检测结果判断是否为绝缘子,并在判定为绝缘子后定位绝缘子伞裙半径极大值点对应的高度;
基于水平分布的两个激光传感器,并根据绝缘子伞裙水平横截面的圆形特征,调整激光传感器阵列朝向,以使其对准绝缘子竖直中心轴。
进一步地,将中心处激光传感器记为1号传感器,竖直分布的两个激光传感器分别记为2号、3号传感器,所述初步定位具体包括以下步骤:
使激光传感器阵列原地转向,并读取1、2、3号传感器的测距结果,若测距结果满足如下约束条件,则初步认为检测到了绝缘子:
std({d
式中:d
进一步地,对初步定位的物体检测是否具有绝缘子伞裙的波动性特征具体包括以下步骤:
将激光传感器阵列缓慢下降2T,T为绝缘子相邻最大半径伞裙间距,在此过程中读取1、2、3号传感器测距结果的最大、最小值,根据下式进行绝缘子伞裙的波动性检测,若满足下式,则判断物体侧面具有绝缘子伞裙的波动性特征:
min(d
式中:d
进一步地,对初步定位的物体检测是否具有绝缘子伞裙的周期性特征具体包括:
根据下降2T过程中1、2、3号传感器测得的最大、最小值,根据下式进行绝缘子伞裙的周期性检测,若满足下式,则判断物体侧面具有绝缘子伞裙的周期性特征:
||(std(d
式中:std(·)表示求标准差,||·||
进一步地,所述绝缘子伞裙半径极大值点对应的高度为在2T的下降过程中1、2、3号传感器测距结果最小值对应的高度。
进一步地,调整激光传感器阵列朝向具体包括:
根据水平方向的两个传感器的测距结果的大小关系和绝缘子伞裙水平横截面的圆形特征,确定激光传感器阵列的调整方向;并以水平方向的两个传感器的测距结果的差值确定激光传感器阵列的调整角度;
根据所述调整方向和调整角度,调整激光传感器阵列的朝向直至水平方向的两个传感器的测距结果的差值在允许范围内。
进一步地,将水平方向的两个传感器分别记为4号、5号传感器,所述调整角度根据下式计算得到:
Δθ
式中,d
进一步地,所述的一种基于激光传感器阵列的绝缘子检测定位方法,还包括:对绝缘子进行前期数学建模,具体为:
选取复合正弦函数对绝缘子进行近似拟合,拟合公式如下:
式中:R
其中,参数ν>0,g>0且有νg>2;Beta函数B(ν
绝缘子表面模型建立如下:
式中,h
进一步地,所述的一种基于激光传感器阵列的绝缘子检测定位方法,还包括:对激光传感器及其阵列进行数学建模,具体为:
激光传感器的位姿由(x,y,z,θ)表示,其中(x,y,z)表示激光传感器所在的三维空间坐标,θ表示激光传感器的朝向;
激光传感阵列具备如下位姿变化能力:
前进/后退:激光传感器阵列沿着当前朝向在水平面上进行前进/后退,所有的激光传感器的高度不变、朝向不变,但在地面投影点坐标会同步改变;
转向:激光传感器阵列在原地改变自身的整体朝向,所有传感器的高度不变,朝向同步改变,安装于竖直轴的传感器位置不变,安装于水平轴的传感器绕竖直轴旋转,旋转方向与角度大小与阵列整体朝向角度变化相同;
升降:激光传感器阵列沿竖直反向进行升降,所有传感器的朝向不变、位置不变,高度同步增减。
进一步地,中心处激光传感器离地高度为100cm,竖直分布的两个激光传感器离地高度分别为100-5T cm和100+5T cm,T为绝缘子相邻最大半径伞裙间距;水平分布的两个激光传感器与中心处激光传感器的距离为10cm。
有益效果:与现有技术相比,本发明具有如下有益效果:
1)本发明基于激光传感器阵列数据,通过检测绝缘子侧面的周期性和波动性特征,实现了绝缘子空间位置的检测定位及最大伞裙半径对应高度和绝缘子竖直中心轴的定位;
2)本发明没有使用现今常用的机器视觉算法进行绝缘子检测,而是使用激光传感器阵列的测距结果进行数据分析,数据处理量小,降低了搭载算法的硬件的计算能力的需求,完全可以使用PLC等可靠性更高的工业编程方法进行实现,降低了硬件成本,并兼顾了稳定性和快速性;
3)本发明的数据来源是深度信息,基于深度信息进行后续的特征提取和从而实现绝缘子检测定位,深度信息作为输入源本质上可以更好的实现清扫过程中的绝缘子保护,安全性高;
4)本发明针对绝缘子的泛式几何特征规律进行传感器激光阵列的架构,一方面特殊严苛的筛选条件可以有效排除绝缘子所处的复杂环境影响,一方面针对绝缘子的相关特征参数在建模加以考虑,使得本发明具有良好的泛用性,适用于各式柱状绝缘子,且预留检测阈值作为调控参数也可以解决现实中检测精度和绝缘子自身尺寸等原因带来的检测误差问题。
附图说明
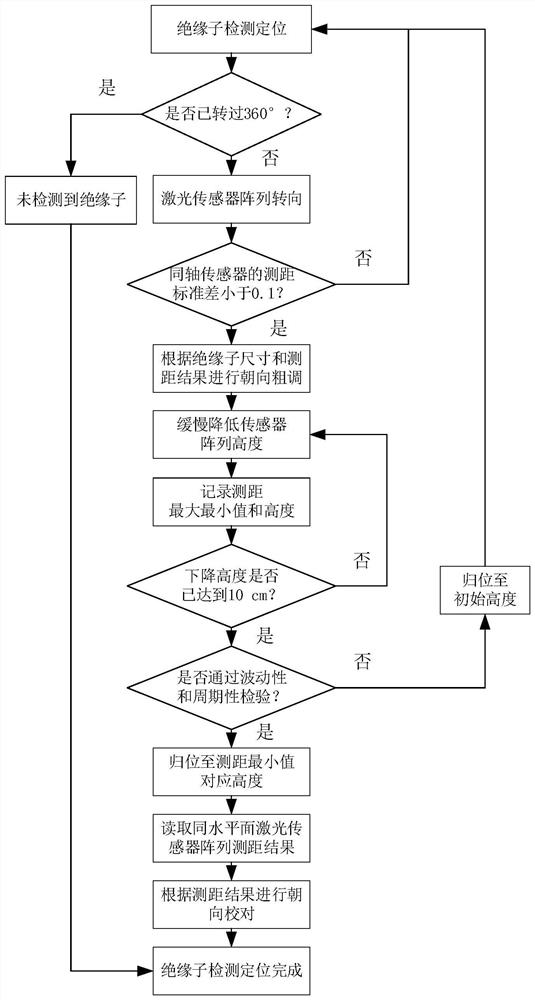
图1为本发明实施例的一种基于激光传感器阵列的绝缘子检测定位方法的详细流程图;
图2为激光传感器阵列结构的正视图;
图3为竖直同轴激光传感器阵列进行绝缘子侧面周期性和波动性检测示意图;
图4为水平等高激光传感器阵列进行绝缘子中心轴朝向校对示意图;
图5为典型绝缘子数学模型截面图;
图6为激光传感器测距过程数学建模示意图;
图7为1、2、3号传感器测距最大、最小值记录;
图8为绝缘子伞裙半径极大值点对应高度定位示意图;
图9为激光传感器阵列朝向校对过程;
图10为激光传感器阵列朝向校对完成结果展示图。
具体实施方式
下面结合具体实施例对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
如前所述,现有技术中存在由于绝缘子所处物理、电磁环境复杂,机器视觉运算量过大,导致现有机器人不能实现对绝缘子进行快速检测定位的问题,为此,本发明提供了一种基于激光传感器阵列的绝缘子检测定位方法。
首先需要说明的是,本申请的“绝缘子”作广义理解,按照绝缘和连接形式的不同,绝缘子可分为狭义绝缘子、瓷套和套管。下面以狭义绝缘子为例进行说明。
本发明实施例的一种基于激光传感器阵列的绝缘子检测定位方法主要包括绝缘子柱状特征检测、绝缘子边缘波动性与周期性特征检测及伞裙最大半径高度定位、绝缘子中心轴定位,其具体流程如图1所示。
在本发明实施例中,首先对激光传感器阵列和绝缘子进行前期数学建模,而后对绝缘子柱状特征检测(以下简称绝缘子初步检测)、绝缘子边缘波动性与周期性特征检测及伞裙最大半径高度定位(以下简称绝缘子特征检测)、绝缘子中心轴定位(以下简称阵列朝向校对)进行具体介绍。
0)前期数学建模
1.绝缘子数学建模
根据绝缘子特征,其横截面近似视作圆形,且圆形半径与横截面离地高度呈现明显的周期性变化规律,由于本申请的检测依据与圆形半径的最大、最小值相关,与曲线形状无关,本申请选取复合正弦函数进行近似拟合,拟合公式如下:
式中:式中:R
其中,参数ν>0,g>0且有νg>2;Beta函数B(ν
故据此建立绝缘子表面模型如下:
式中h
2.激光传感器及其阵列数学建模
激光传感器水平放置,故其位姿可由(x,y,z,θ)表示,其中(x,y,z)表示传感器所在的三维空间坐标,θ表示激光传感器的朝向。
所有的激光传感器均水平放置,且朝向一致,区别在于安装位置,各个激光传感器的安装方法具体为:三个安装于同一竖直刚体轴,离地高度分别为100-5T cm、100cm、100+5T cm;另外两个位于100cm高度水平面,且关于竖直轴在此高度平面投影点中心对称,且均距离竖直轴投影点10cm,安装于此三点所确定的水平刚体轴上,故所述激光传感器安装于由竖直刚体轴和水平刚体轴连接的“十”字形结构上且随“十”字形刚体轴结构移动而变化。为便于表示,规定安装于竖直轴且离地100cm的传感器为1号传感器,安装于竖直轴且离地100-5T cm的传感器为2号传感器,安装于竖直轴且离地100+5T cm的传感器为3号传感器,安装于水平轴且在激光传感器阵列朝向左侧的传感器为4号传感器,安装于水平轴且在激光传感器阵列朝向右侧的传感器为5号传感器,后续将按此方式进行表述,按此方法表述的传感器阵列模型如图2所示。
3.激光传感器阵列位姿变换约束
激光传感器阵列安装在机器人结构上,故规定其具备如下位姿变化能力,且在进行位姿变化时相关的约束介绍如下:
1)前进/后退:激光传感器阵列可以沿着当前朝向在水平面上进行前进/后退,激光传感器阵列位姿变化如下:
式中形如x
2)转向:激光传感器阵列可以在原地改变自身的整体朝向,所有传感器的高度不变,朝向同步改变,但是部分传感器的位置会有变化,具体描述如下:
3)升降:竖直刚体轴应具备伸缩功能,可以进行升降操作,在进行升降时,所有传感器的朝向不变、位置不变,高度同步增减,具体位姿描述如下:
1)绝缘子初步检测:
使激光传感器阵列开始原地转向,并读取1、2、3号传感器的测距结果,若测距结果满足如下约束,则认为检测到了可能是绝缘子的器件:
std({d
式中:d
若激光传感器阵列对向绝缘子,由于其同轴高度差为绝缘子周期的若干整数倍,根据绝缘子侧面截面圆半径的周期性特征,同轴激光传感器的测距结果应该近似相等,据此实现绝缘子的初步检测。
2)绝缘子特征检测
绝缘子的初步定位不能直接确认物体是否为绝缘子,因为许多器件,如墙面、电力屏柜等均会导致同轴传感器测距结果接近,故需要针对绝缘子的伞裙特征进行进一步的特征提取,从而确定激光传感器阵列所朝向器件为绝缘子,本申请将其划分为两项检测:波动性检测和周期性检测。下面将对其进行具体介绍,只有同时满足波动性和周期性特征,才能确认其为绝缘子。
1.绝缘子侧面波动性检测
绝缘子的伞裙结构势必会使得激光传感器在高度发生变化时的测距结果呈现明显的波动性,故激光传感器阵列在完成初步检测后缓慢下降2T,在此过程中读取1、2、3号激光传感器测距结果,为降低数据存储量和运算量,只保留其各自测距结果的最大、最小值,而后根据下式进行波动性检测:
min(d
式中:d
2.绝缘子侧面周期性检测
绝缘子的伞裙结构呈现除了明显的波动性,还呈现明显的周期性,因为各个伞裙的结构近似相同,所以不同高度的激光传感器因为其相距高度差为伞裙高度的整数倍,测距结果的波动情况应近似相等,故依旧根据下降2T过程中各个传感器测距结果的最大、最小值,根据下式进行绝缘子的周期性检测:
||(std(d
式中:d
此外,在下降2T的过程中,在读取激光传感器的测距结果的同时,也将记录1、2、3号传感器测距结果最小值对应的高度。测距结果最小意味着伞裙半径最大,记录此高度以实现绝缘子伞裙半径极大值点对应高度的定位。
3)阵列朝向校对
若完成绝缘子侧面的波动性和周期性检测,确认激光传感器已经大致对向了绝缘子,则需根据在确认所监测物体为绝缘子且完成对于绝缘子级伞裙外径极大值点的定位后,根据传感器4和5测距结果的差值控制机器人转向,从而使得机器人调整朝向对准绝缘子,为了方便起见,本申请的转向控制选取比例控制器,即转向角度△θ可由下式计算得到:
Δθ
式中d
下面通过具体实例对本发明的方案作进一步阐述:
1)数学模型参数设置及激光传感器补充建模
本发明在MATLAB中搭建数学模型验证算法的可行性。首先选取一个典型的绝缘子结构进行数学建模,经过相关资料学习后确立绝缘子参数如下:
表1典型绝缘子参数
而后按照公式(1)-(2)进行建模后,可得绝缘子相关的数学模型如图5所示。
在得到绝缘子模型后,由于未使用真实的激光传感器,需对激光传感器的测距过程进行数据建模,结合之前公式(3)-(5)进行的激光传感器建模结果,对激光传感器的测距过程进行建模,其求解过程如下:
式中(x
令公式(10)在有交点时两个根为(x
而后设置激光传感器阵列初始坐标信息如表2所示,由此完成激光传感器测距过程建模,其示意图如图6所示。
表2激光传感器初始位姿参数
2)绝缘子初步检测
使激光传感器阵列开始原地转向,激光传感器阵列的位姿变换符合如下约束:
而后读取1、2、3号传感器的测距结果,若测距结果满足如下约束,则认为检测到了可能是绝缘子的器件:
std({d
式中:d
3)绝缘子波动性特征检测
在完成初步检测后,使激光传感器阵列缓慢下降20cm,在此过程中读取1、2、3号激光传感器测距结果,记录结果如图7所示,而后根据下式进行波动性检测:
min(d
式中:d
4)绝缘子周期性检测
根据下降20cm过程中各个传感器测距结果的最大、最小值,根据下式进行绝缘子的周期性检测:
||(std(d
式中:d
5)绝缘子伞裙最大半径高度对应高度定位
此外,在下降20cm的过程中,在读取激光传感器的测距结果的同时,也将记录1、2、3号传感器测距结果最小值对应的高度,以实现绝缘子伞裙半径极大值点对应高度的定位,检测结果如图8所示。
6)绝缘子朝向校对
在确认所监测物体为绝缘子且完成对于绝缘子级伞裙外径极大值点的定位后,根据传感器4和5测距结果的差值控制机器人转向,从而使得机器人调整朝向对准绝缘子,为了方便起见,本发明的转向控制选取比例控制器,即转向角度△θ可由式(9)计算得到。
式(9)中,k值的选取会影响机器人进行朝向校对时的表现,k值越大,阵列转动越剧烈,但可能导致不收敛引发振荡且可能会破坏绝缘子,k值过小,阵列收敛过慢降低了机器人清理的效率,考虑到本实例为工业模型,此处不过多探究,选定k值为0.0025。
在朝向校对过程仿真中,实时记录机器人的横向传感器阵列(1、4、5号传感器)测距结果绘制曲线如图9所示,可见在经过13次方向微调后传感器4和传感器5测距值相差不到0.1cm,符合精度要求,表明朝向校对成功。
7)校对完成,结果展示。
至此,朝向校对完成,结果如图10所示。
由以上实施例可以看出,本发明的一种基于激光传感器阵列的绝缘子检测定位方法,具有以下有益效果:
1)本发明基于激光传感器阵列数据,通过检测绝缘子侧面的周期性和波动性特征,实现了绝缘子空间位置的检测定位及最大伞裙半径对应高度和绝缘子竖直中心轴的定位,是机器人绝缘子清扫装置的必要步骤;
2)本发明没有使用现今常用的机器视觉算法进行绝缘子检测,而是使用激光传感器阵列的测距结果进行数据分析,数据处理量小,降低了搭载算法的硬件的计算能力的需求,完全可以使用PLC等可靠性更高的工业编程方法进行实现,降低了硬件成本,并兼顾了稳定性和快速性;
3)本发明的数据来源是深度信息,基于深度信息进行后续的特征提取和从而实现绝缘子检测定位,深度信息作为输入源本质上可以更好的实现清扫过程中的绝缘子保护,安全性高;
4)本发明针对绝缘子的泛式几何特征规律进行传感器激光阵列的架构,一方面特殊严苛的筛选条件可以有效排除绝缘子所处的复杂环境影响,一方面针对绝缘子的相关特征参数在建模加以考虑,使得本发明具有良好的泛用性,适用于各式柱状绝缘子,且预留检测阈值作为调控参数也可以解决现实中检测精度和绝缘子自身尺寸等原因带来的检测误差问题。
以上已以较佳实施例公布了本发明,然其并非用以限制本发明,凡采取等同替换或等效变换的方案所获得的技术方案,均落在本发明的保护范围内。
- 一种基于激光传感器阵列的绝缘子检测定位方法
- 一种基于激光传感器阵列的贯流风叶注塑缺料缺陷检测方法与装置