一种智能语音垃圾桶声音拾取和低功耗控制方法
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及智能垃圾桶技术领域,特别是一种智能语音垃圾桶声音拾取和低功耗控制方法。
背景技术
智能垃圾桶是将传统的垃圾收集箱和人工智能进行结合后的产物,结合了垃圾收集箱的收集功能和人工智能的特性,形成了自行式智能垃圾桶,使人们的日常生活更加便利。
目前市场上智能语音垃圾桶通过语音控制机器的功能操作有两种模式,一种是通过外接在线语音设备,另一种是内置语音模块,无论哪种模式,在机器不操作时,为了降低语音模块的功耗,机器需进入待机状态或者睡眠状态,外接在线的语音设备模式,需要保持两端始终相连,才能保证机器第一时间可以进行操作,语音功耗在外接设备端,无法自主降低;而内置语音模块模式,目前市场现有的大多是要么始终处于激活模式或者是通过人体感应模块来检测,人体感应模块是通过检测到前方一定角度范围内有人走动或者靠近时,激活语音模块,开始进语音操作状态,而在人体感应模块前方探测不到人走动时,语音模块会进入休眠状态,降低功耗;然而这种检测方法,只对人体感应模块前方一定角度有效,适用范围有限,导致从其他方向过来时,无法操作或者操作不灵敏的现象发生。
发明内容
本发明的目的是为了解决上述问题,设计了一种智能语音垃圾桶声音拾取和低功耗控制方法。
实现上述目的本发明的技术方案为,一种智能语音垃圾桶声音拾取和低功耗控制方法。
其有益效果在于,本发明提供了智能语音垃圾桶声音拾取和低功耗控制方法,包括声音拾取控制和语音模块低功耗休眠控制,通过咪头检测环境声音的方法来控制语音模块的激活和休眠,这里通过设定环境分贝值来控制语音模块,当机器在安静的环境下,检测到周围声音分贝低于预设值时,语音模块断电进入休眠模式;当检测到周围环境声音分贝高于预设值时,语音模块由休眠模式进入上电待机状态,保持对声音的拾取状态,随时准备语音操作指令,此控制方法,在围绕机器360度的空间范围内都可以适用,不论在机器哪个方位,只需发出声音即可唤醒语音模块进行下一步指令操作,简单便捷,体验效果更佳。
附图说明
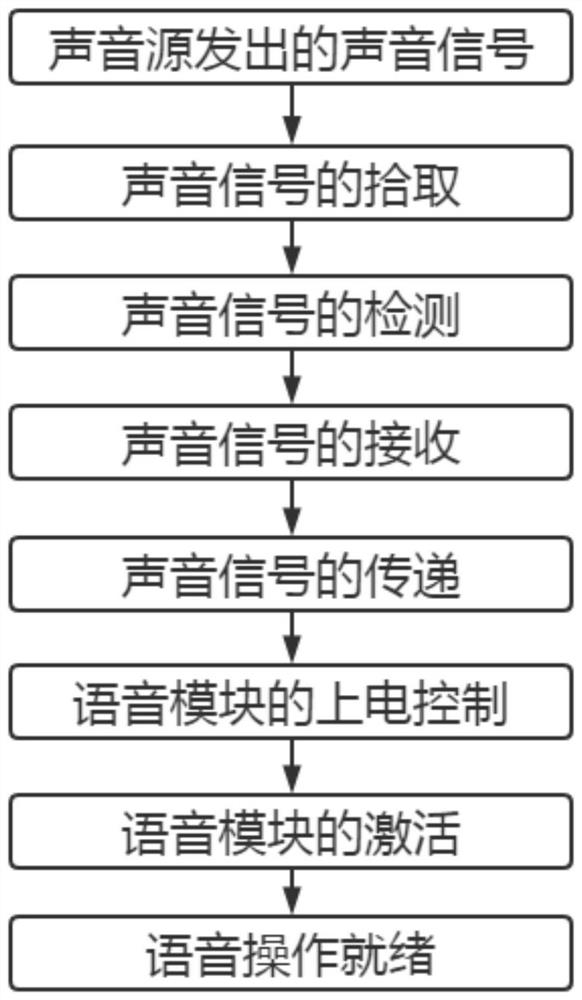
图1是本发明的声音拾取控制步骤图;
图2是本发明的语音模块低功耗休眠控制步骤图。
具体实施方式
首先说明本发明的设计初衷,目前市场上智能语音垃圾桶通过语音控制机器的功能操作有两种模式,一种是通过外接在线语音设备,另一种是内置语音模块,无论哪种模式,在机器不操作时,为了降低语音模块的功耗,机器需进入待机状态或者睡眠状态,外接在线的语音设备模式,需要保持两端始终相连,才能保证机器第一时间可以进行操作,语音功耗在外接设备端,无法自主降低;而内置语音模块模式,目前市场现有的大多是要么始终处于激活模式或者是通过人体感应模块来检测,人体感应模块是通过检测到前方一定角度范围内有人走动或者靠近时,激活语音模块,开始进语音操作状态,而在人体感应模块前方探测不到人走动时,语音模块会进入休眠状态,降低功耗;然而这种检测方法,只对人体感应模块前方一定角度有效,适用范围有限,导致从其他方向过来时,无法操作或者操作不灵敏的现象发生,因此,本发明设计了一种智能语音垃圾桶声音拾取和低功耗控制方法。
下面结合附图对本发明进行具体描述,如图1-图2所示,一种智能语音垃圾桶声音拾取和低功耗控制方法,其特征在于,包括声音拾取控制和语音模块低功耗休眠控制,所述声音拾取控制包括以下步骤:
步骤一:声音源发出的声音信号,在所述步骤一中,声音源发出的声音信号来自于环境发出的声音,人在环境中产生的声音即环境发出的声音;
步骤二:声音信号的拾取,在所述步骤二中,声音信号的拾取,采用咪头对环境发出的声音信号进行拾取采集;
步骤三:声音信号的检测,在所述步骤三中,采用咪头对拾取采集的声音信号进行检测,此检测过程检测声音信号的分贝值;
步骤四:声音信号的接收,在所述步骤四中,智能垃圾桶内设置有MCU,通过MCU实现对检测后的声音信号的接收,当步骤三中的声音信号的分贝值高于预设值时,将信号传输至下一步骤;
步骤五:声音信号的传递,在所述步骤五中,智能垃圾桶内设置有语音模块,将声音信号传输至语音模块;
步骤六:语音模块的上电控制,在所述步骤六中,语音模块接收到声音信号时,开始通电;
步骤七:语音模块的激活,在所述步骤七中,语音模块通电后,语音模块进入激活过程;
步骤八:语音操作就绪,在所述步骤八中,语音模块激活后,语音模块进入操作就绪过程,根据使用者发出的指令,即可完成一系列操作。
下面将详细介绍语音模块低功耗休眠控制的具体过程,语音模块低功耗休眠控制包括以下步骤:
步骤A:环境发出的声音信号的降低,在所述步骤A中,当使用者远离智能垃圾桶时,智能垃圾桶的附近基本没有声音,此时即为环境发出的声音信号的降低,
步骤B:声音信号的检测,在所述步骤B中,采用咪头对拾取采集的声音信号进行检测,此检测过程检测声音信号的分贝值。
步骤C:声音信号的接收,在所述步骤C中,通过MCU实现对检测后的声音信号的接收,当步骤三中的声音信号的分贝值低于预设值时,将信号传输至下一步骤,
步骤D:语音模块的断电控制,在所述步骤D中,通过MCU控制语音模块断电。
步骤E:语音模块的休眠过程,在所述步骤E中,语音模块断电30秒或者一定时间,语音模块自动进入休眠过程;
步骤F:低功耗运行过程,在所述步骤F中,语音模块自动进入休眠过程后,经过30秒或者一定时间,智能垃圾桶即进入低功耗运行过程。
本发明提供的智能语音垃圾桶语音拾取低功耗控制方法,通过咪头检测环境声音的方法来控制语音模块的激活和休眠,这里通过设定环境分贝值来控制语音模块,当机器在安静的环境下,检测到周围声音分贝低于预设值时,语音模块断电进入休眠模式;当检测到周围环境声音分贝高于预设值时,语音模块由休眠模式进入上电待机状态,保持对声音的拾取状态,随时准备语音操作指令,此控制方法,在围绕机器360度的空间范围内都可以适用,不论在机器哪个方位,只需发出声音即可唤醒语音模块进行下一步指令操作,简单便捷,体验效果更佳。
上述技术方案仅体现了本发明技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本发明的原理,属于本发明的保护范围之内。