一种仿生抗沉陷机械足及仿生机械
文献发布时间:2024-01-17 01:21:27
技术领域
本发明属于工程仿生技术领域,尤其涉及一种仿生抗沉陷机械足及仿生机械。
背景技术
我国有大面积的松软土地,主要是指泥泞、浅沼、湿土、稻田、滩涂地面。这些松软土地地质情况特殊,地面承载和抗剪能力差,常规行走机构难以通过,传统的轮式机械和履带式机械并不适用。
我国的大部分水田长期处于积水状态,土壤松软而粘重,粘着性大,机械强度很差,因而在水田上进行行走时,水田上的附着力较小,会产生打滑和下陷,而当打滑和下陷到一定程度时,农业机械将无法在水田上进行行走。除此之外,由于传统农业机械的车轮或履带与水田土壤之间摩擦较小,机械在水田上的行驶不够稳定,也无法得到足够的推进力。滩涂是我国重要的后备土地资源,具有面积大、分布集中、区位条件好、农牧渔业综合开发潜力大等特点,不仅是一种重要的土地资源和空间资源,而且本身也蕴藏着各种矿产、生物及其它海洋资源。同时滩涂养殖也是海洋水产业之一,指利用位于海边潮间带的软泥或沙泥地带加以平整,筑堤、建坝等进行地海水养殖。滩涂属于典型的松软湿滑地面类型,由于滩涂地面的承载和抗剪能力差,轮式运动车辆在滩涂地面运动时容易产生打滑、沉陷和牵引不足等问题。相比于轮式车辆,履带式车辆在滩涂地面的通过性较高,但是履带式车辆底盘的质量大、转向半径大、灵活性差。
然而,车辆行驶在这种地面的通过性能很差,因此,滩涂地面实现机械化作业的关键是解决移动机构的通过性问题。综上所述,土壤对车辆的粘着性以及车辆松软土壤上通过性差是土壤—车辆领域的两大技术难题。
发明内容
针对上述技术问题,本发明提供一种仿生抗沉陷机械足及仿生机械,将绿头鸭足作为仿生原型,基于绿头鸭足趾-蹼及足底形貌特征与腱骨协同运动机制展开设计,通过模仿绿头鸭足底非规则边缘曲线、跖趾关节的三点维稳和肌腱的节能减振这三点特征,以解决滩涂地面高牵引移动机构的通过性问题。
绿头鸭属游禽,大型鸭类。体长47-62厘米,体重大约1千克,外形大小和家鸭相似,通常栖息于淡水湖畔,亦成群活动于江河、湖泊、水库、海湾和沿海滩涂盐场等水域,且在滩涂、泥泞等松软地面运动时不易出现打滑、沉陷等现象,由此可以判断,绿头鸭常年生活在滩涂地带,已具备了抗沉陷的运动特性。
绿头鸭在陆地上能每分钟行走45-50米,奔跑的速度较快。绿头鸭足作为绿头鸭与地面直接接触的行走执行机构,在其进行行走、奔跑等运动时起主导作用,绿头鸭在滩涂地面的高通过性与其足趾-蹼结构形貌等特征密切相关,绿头鸭的趾-蹼协同运动在抗沉陷过程中发挥了重要作用,为抗沉陷仿生足设计提供了理想的仿生原型。
目前国内在仿生机械学领域关于滩涂、泥泞等松软地面上的研究成果不多,而关于绿头鸭脚蹼的研究资料更是有限,考虑到机械的工作环境是在滩涂、泥泞等松软地面上,特别是当工作环境是农田时,需要保证土壤不能受到破坏,以免造成不必要的损失。
本发明解决其技术问题所采用的技术方案是:一种仿生抗沉陷机械足,包括仿生足部、仿跖趾关节、仿跗跖骨和仿肌腱单元;
所述仿生足部与仿跗跖骨通过仿跖趾关节连接,仿肌腱单元一端与仿跗跖骨连接,另一端与仿生足部连接;
所述仿生足部包括足底边缘仿生曲线、足趾和足蹼,足蹼设于足趾之间,足趾与仿跗跖骨通过仿跖趾关节连接,足底边缘仿生曲线为足趾和足蹼形成的外围曲线;
所述仿跖趾关节包括关节头和关节窝,关节头和关节窝一凸一凹配合,关节头与仿跗跖骨连接,关节窝与足趾连接;
所述仿肌腱单元包括仿伸肌腱和仿屈肌腱,仿伸肌腱和仿屈肌腱在仿跗跖骨两侧相对设置,仿伸肌腱一端与仿跗跖骨连接,另一端与足趾连接,仿屈肌腱一端与仿跗跖骨连接,另一端与足趾连接。
上述方案中,所述足底边缘仿生曲线包括第一仿生曲线、第二仿生曲线和第三仿生曲线;
分别满足以下方程:
第一仿生曲线:y=0.0162x
第二仿生曲线:y=0.0246x
第三仿生曲线:y=0.0223x
上述方案中,所述包括第二趾、第三趾和第四趾,所述足蹼包括左蹼和右蹼;
所述第二趾、第三趾和第四趾相互连接,在第二趾和第四趾、第三趾和第四趾间分别设有开槽,左蹼和右蹼分别安装在开槽中。
上述方案中,所述仿生足部还包括凸起,所述凸起均匀分布在足趾底面。
上述方案中,所述凸起的最高处在同一平面内。
上述方案中,所述仿伸肌腱和仿屈肌腱的结构相同,包括弹簧、弹簧座、保护套筒和固定盖;
所述保护套筒为空心圆柱,弹簧与弹簧座的一端放置在保护套筒内,固定盖与保护套筒连接,弹簧一端与保护套筒连接,另一端与弹簧座连接,弹簧座另一端穿过固定盖外面;
所述弹簧座与仿跗跖骨连接,保护套筒与足趾连接。
上述方案中,所述足蹼位于仿生足部的中下部,与足底的距离为整个足厚度的五分之一。
上述方案中,所述关节头包括第一关节头、第二关节头和第三关节头;所述关节窝包括第一关节窝、第二关节窝和第三关节窝;
所述第一关节头与第一关节窝相互配合,第二关节头与第二关节窝相互配合,第三关节头与第三关节窝相互配合;
所述第一关节头、第二关节头和第三关节头位置分布呈“等腰三角型”,第二关节头最大,位于中间位置,并相对另两个关节头凸起,第一关节头和第三关节头大小相同,均倾斜放置,分别紧靠第二关节头左右两侧,并与第二关节头错开接触,且第一关节头和第三关节头相对于第二关节头对称;
所述第一关节窝、第二关节窝和第三关节窝位置分布呈“等腰三角型”,第二关节窝面积最大,位于中间位置,并相对另两个关节窝凹陷,第一关节窝和第三关节窝大小相同,均倾斜放置,分别位于第二关节窝左右两侧,并与第二关节窝错开,且第一关节窝和第三关节窝相对于第二关节窝对称,第一关节窝、第二关节窝和第三关节窝下凹深度一致。
上述方案中,所述凸起材质为高弹性橡胶;所述足蹼材质为高弹性橡胶。
一种仿生机械,包括上述的仿生抗沉陷机械足。
与现有技术相比,本发明的有益效果是:
1.本发明将绿头鸭足作为仿生原型,提取绿头鸭足底边缘曲线,以此为基准设计出仿生足部,并模仿绿头鸭足趾-蹼结构形貌,提高了机械足在滩涂地面的通过性。
2.本发明足蹼采用高弹性橡胶材料,模仿绿头鸭足底粗糙纹路的功能,在足趾底部均匀分布凸起,增强了仿生足的附着性和通过性,提高了机械足在滩涂地面的通过性。
3.本发明通过模仿绿头鸭足跗跖骨与趾骨的连接形式,仿跗跖骨与仿生足部通过仿跖趾关节间接相连,使得仿跖趾关节成为动作的枢纽和支点,增加了机械足的灵活性。
4.本发明模仿绿头鸭足关节头与关节窝的结构形貌与位置分布,仿跖趾关节包括关节头与关节窝,关节头与关节窝之间为球面接触,能够改善零件受力状况,提升结构稳定性,增强承重能力,起到缓冲作用,并减少磨损,延长使用寿命。
5.本发明模仿绿头鸭足中的伸、屈肌腱设计仿肌腱单元,能够实现节能减振的功能;弹簧与弹簧座设置为一体,仿跗跖骨与仿生足部运动时,通过弹簧座将运动传递给弹簧,使仿肌腱单元的结构更稳定,并可稳定仿跖趾关节,稳固仿跗跖骨与仿生足部的连接,协助仿跗跖骨与仿生足部进行正常的相对活动;固定盖将弹簧固定在保护套筒内,可保护弹簧,延长仿肌腱单元的使用寿命,并可对仿跗跖骨与仿生足部二者的相对活动进行限制,防止关节过度伸展。
附图说明
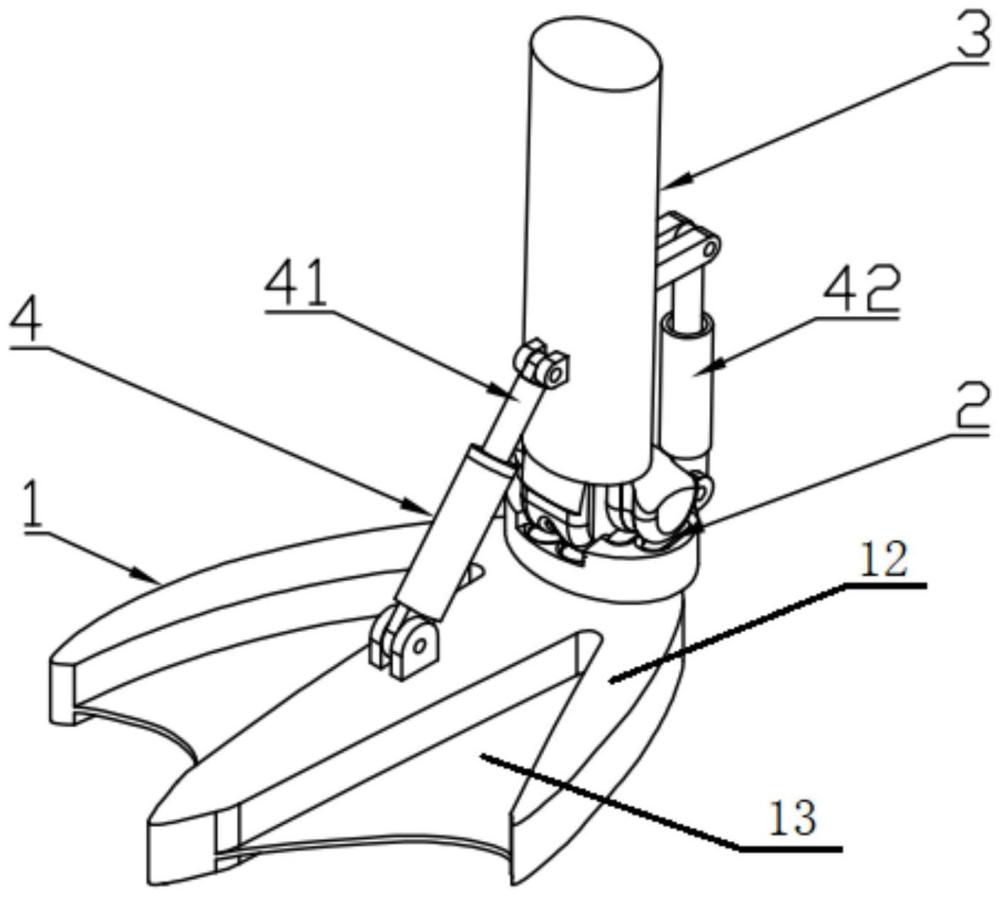
图1是本发明一实施方式的仿生抗沉陷机械足结构示意图。
图2是本发明一实施方式的仿生抗沉陷机械足右视图示意图。
图3是本发明一实施方式的仿生抗沉陷机械足后视图示意图。
图4是本发明一实施方式的仿生抗沉陷机械足俯视图示意图。
图5是本发明一实施方式的仿生抗沉陷机械足的仿生足部仰视图示意图。
图6是本发明一实施方式的仿生抗沉陷机械足的关节头和关节窝的配合放大示意图。
图7是本发明一实施方式的仿生抗沉陷机械足的关节头结构示意图。
图8是本发明一实施方式的仿生抗沉陷机械足的关节窝结构示意图。
图9是本发明一实施方式的仿生抗沉陷机械足的仿肌腱单元结构示意图。
图10是本发明一实施方式的仿生抗沉陷机械足的仿肌腱单元装配剖视图示意图。
图11是本发明一实施方式的三维扫描得到的理想绿头鸭足几何模型示意图。
图12是本发明一实施方式的校正坐标系后绿头鸭足几何模型示意图。
图13是本发明一实施方式的绿头鸭足边缘轮廓曲线示意图。
图14是本发明一实施方式的仿生抗沉陷机械足刚触地时姿态示意图。
图15是本发明一实施方式的仿生抗沉陷机械足触地中期时姿态示意图。
图16是本发明一实施方式的仿生抗沉陷机械足离地时姿态示意图。
图中:1、仿生足部;2、仿跖趾关节;3、仿跗跖骨;4、仿肌腱单元;11、足底边缘仿生曲线;111、第一仿生曲线;112、第二仿生曲线;113、第三仿生曲线;12、足趾;121、第二趾;122、第三趾;123、第四趾;13、足蹼;131、左蹼;132、右蹼;14、凸起;15、足底;21、关节头;211、第一关节头;212、第二关节头;213、第三关节头;22、关节窝;221、第一关节窝;222、第二关节窝;223、第三关节窝;41、仿伸肌腱;411、弹簧;412、弹簧座;413、保护套筒;414、固定盖;42、仿屈肌腱。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。
下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“前”、“后”、“左”、“右”、“上”、“下”、“轴向”、“径向”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
图1、图2、图3、图4所示为所述仿生抗沉陷机械足的一种较佳实施方式,所述仿生抗沉陷机械足,包括仿生足部1、仿跖趾关节2、仿跗跖骨3和仿肌腱单元4;
所述仿生足部1与仿跗跖骨3通过仿跖趾关节2连接,仿肌腱单元4一端与仿跗跖骨3连接,另一端与仿生足部1连接;
如图5、图11、图12、图13所示,所述仿生足部1包括足底边缘仿生曲线11、足趾12和足蹼13,足蹼13设于足趾12之间,足趾12与仿跗跖骨3通过仿跖趾关节2连接,足底边缘仿生曲线11为足趾12和足蹼13形成的外围曲线;仿生足部1作为直接触地机构,增强了仿生足的附着性和通过性。
如图6所示,所述仿跖趾关节2包括关节头21和关节窝22,关节头21和关节窝22一凸一凹配合,关节头21与仿跗跖骨3连接,关节窝22与足趾12连接。
优选的,关节头21与仿跗跖骨3通过螺纹连接,关节窝22与仿生足部1通过螺纹连接,关节头21与关节窝22一凸一凹使仿跗跖骨3与仿生足部1相连。
优选的,所述仿跗跖骨3为椭圆柱状的刚性杆件,一端能够与工作机构连接。
本发明通过模仿绿头鸭足跗跖骨与趾骨的连接形式,仿跗跖骨3与仿生足部1通过仿跖趾关节2间接相连,使得仿跖趾关节2成为动作的枢纽和支点,增加了机械足的灵活性。
所述仿肌腱单元4包括仿伸肌腱41和仿屈肌腱42,仿伸肌腱41和仿屈肌腱42在仿跗跖骨3两侧相对设置,仿伸肌腱41一端与仿跗跖骨3连接,另一端与足趾12连接,仿屈肌腱42一端与仿跗跖骨3连接,另一端与足趾12连接,起到稳固仿跖趾关节的连接和限位作用。
优选的,所述足底边缘仿生曲线11包括第一仿生曲线111、第二仿生曲线112和第三仿生曲线113;
分别满足以下方程:
第一仿生曲线111:y=0.0162x
第二仿生曲线112:y=0.0246x
第三仿生曲线113:y=0.0223x
本发明将绿头鸭足作为仿生原型,提取绿头鸭足底边缘曲线,以此为基准设计出仿生足部,并模仿绿头鸭足趾-蹼结构形貌,提高了机械足在滩涂地面的通过性。优选的,所述足趾12包括第二趾121、第三趾122和第四趾123;所述足蹼13包括左蹼131和右蹼132;
所述第二趾121、第三趾122和第四趾123的后端相互连接,在第二趾121和第四趾123、第三趾122和第四趾123间分别设有开槽,左蹼131和右蹼132分别安装在开槽中。
优选的,所述仿生足部1还包括凸起14,所述凸起14均匀分布在足趾12底面,凸起14为大小相同的小圆点。
优选的,所述凸起14的最高处在同一平面内,凸起14模仿绿头鸭足底粗糙纹路的功能,增大摩檫力。
本发明足蹼采用高弹性橡胶材料,模仿绿头鸭足底粗糙纹路的功能,在足趾底部均匀分布凸起14,增强了仿生足的附着性和通过性,提高了机械足在滩涂地面的通过性。如图9、图10所示,优选的,所述仿伸肌腱41和仿屈肌腱42的结构相同,功能上模仿绿头鸭足中的仿伸肌腱与仿屈肌腱,节能减振,包括弹簧411、弹簧座412、保护套筒413和固定盖414;
所述保护套筒413为空心圆柱,弹簧411与弹簧座412的一端放置在保护套筒413内,固定盖414与保护套筒413连接,弹簧411一端与保护套筒413连接,另一端与弹簧座412连接,弹簧座412另一端穿过固定盖414外面;
优选的,固定盖414与保护套筒413通过螺纹连接,方便拆卸组装。
所述弹簧座412与仿跗跖骨3连接,保护套筒413与足趾12连接。
本发明模仿绿头鸭足中的伸、屈肌腱设计仿肌腱单元,能够实现节能减振的功能;弹簧411与弹簧座412设置为一体,仿跗跖骨3与仿生足部1运动时,通过弹簧座412将运动传递给弹簧411,使仿肌腱单元的结构更稳定,并可稳定仿跖趾关节,稳固仿跗跖骨3与仿生足部1的连接,协助仿跗跖骨3与仿生足部1进行正常的相对活动;固定盖414将弹簧411固定在保护套筒413内,可保护弹簧411,延长仿肌腱单元的使用寿命,并可对仿跗跖骨与仿生足部二者的相对活动进行限制,防止关节过度伸展。
优选的,所述足蹼13位于仿生足部1的中下部,与足底的距离为整个足厚度的五分之一,有利于蹼对松软地面的附着。
如图7、图8所示,优选的,所述关节头21包括第一关节头211、第二关节头212和第三关节头213;所述关节窝22包括第一关节窝221、第二关节窝222和第三关节窝223;
所述第一关节头211与第一关节窝221相互配合,第二关节头212与第二关节窝222相互配合,第三关节头213与第三关节窝223相互配合;
所述第一关节头211、第二关节头212和第三关节头213位置分布呈“等腰三角型”,第二关节头212最大,其正放处于中间位置,并相对另两个关节头凸起,第一关节头211和第三关节头213大小相同,均倾斜放置,分别紧靠第二关节头212左右两侧,并与第二关节头212错开接触,且第一关节头211和第三关节头213相对于第二关节头212对称;
所述第一关节窝221、第二关节窝222和第三关节窝223位置分布呈“等腰三角型”,第二关节窝222面积最大,其正放处于中间位置,并相对另两个关节窝凹陷,第一关节窝221和第三关节窝223大小相同,均倾斜放置,分别位于第二关节窝222左右两侧,并与第二关节窝222错开,且第一关节窝221和第三关节窝223相对于第二关节窝222对称,第一关节窝221、第二关节窝222和第三关节窝223下凹深度一致。
优选的,所述凸起14材质为高弹性橡胶;所述足蹼13材质为高弹性橡胶。
一种仿生机械,包括上述的仿生抗沉陷机械足。
如图11-13所示,所述足底边缘仿生曲线的仿生方法:
绿头鸭运动过程中,触地中期时全掌触地,趾间蹼全开,触地面积达到最大,此触地期最为关键,故以此触地期为代表,提取绿头鸭足底边缘仿生曲线。
在本发明的一个具体实施方式中,优选的,选用新鲜的、大小合适的离体绿头鸭足,并借助纸板、胶水、铁丝和筷子等工具帮助形貌固定,获取绿头鸭足部原型。使用手持式三维扫描仪对处理好的绿头鸭足进行扫描,获取绿头鸭足的三维点云数据。
由于激光扫描时会扫到绿头鸭足周边的物体,因此得到的模型会出现很多噪声点,得到的模型并不是一个完整的绿头鸭足模型。此外,由于绿头鸭足较小且表面凹凸不平,部分区域很难扫到,因此会出现漏洞等缺陷,所以需借助逆向工程软件GeomagicStudio对模型进行一系列的修复工作才能得到理想的绿头鸭足几何模型。将扫描获取的绿头鸭足的三维点云文件保存为stl格式导入GeomagicStudio软件,借助Geomagic Studio软件对扫描获得的绿头鸭足三维点云模型进行网格医生、去噪、去除特征、填充孔和雕刻等一系列的修复工作得到光滑平顺的理想的绿头鸭足的三维几何模型,如图11所示。
结合图12所示,修复完触地中期的绿头鸭足的三维几何模型后,在GeomagicStudio软件中使用“特征”下“平面”中的“最佳拟合”,在绿头鸭足底面上建立平面1,此平面与绿头鸭足底面平行,建立此平面时尽量多地选择在绿头鸭足底面上的点;为方便直线1的建立,先将XY平面与平面1即绿头鸭足底面对齐,使用“对齐”下的“对齐到全局”,将XY平面与平面1配对;使用“特征”下“直线”中的“2个点”建立直线1,选择第Ⅲ趾的趾尖点与第Ⅲ趾的趾根中点,并将两点的Z坐标值设为一致,两点建立一条直线,此直线分别与第Ⅲ趾和平面1平行;使用“特征”下“平面”中的“垂直于轴”,以直线1为轴,建立平面2,此平面与直线1垂直;使用“特征”下“平面”中的“过点垂直于”建立平面3,此平面分别与平面1和平面2垂直;所有平面创建好后,适当对平面的边界与中心点坐标进行调整,使用“对齐”下的“对齐到全局”,将YZ平面和XZ平面分别与平面2与平面3配对,对齐完成,将文件保存为stl格式。
将Geomagic Studio软件处理过的对正的触地中期的绿头鸭足的三维几何模型导入SolidWorks软件中进行曲线提取,找到绿头鸭足底全貌平面,在原绿头鸭足的边缘轮廓的基础上使用草图中的“样条曲线”功能进行描边,在总体上保留原形貌的基础上对绿头鸭足的三维几何模型进行处理,使绿头鸭足边缘轮廓曲线更为平顺光滑,得到设计曲线。
在SolidWorks中新建工程图,导入设计曲线的三维图,构建二维图,用CAXA电子图板打开二维图,使用CAXA电子图板软件中“视图”下“用户坐标系”中的“新建原点坐标系”新建一个合适的坐标系,将绿头鸭足边缘轮廓曲线按照形状分为3条曲线,使用CAXA电子图板软件中“工具”下“查询”中的“坐标点”,依次手动尽可能均匀的选取坐标点,选完一条曲线上的点后右击鼠标保存坐标点为txt格式文件,打开EXCEL导入txt文件,插入散点图,添加趋势线,显示公式与R
本发明的工程仿生原理:
一种仿生抗沉陷机械足,将绿头鸭足作为仿生原型,主要模仿绿头鸭足底非规则边缘曲线、跖趾关节的三点维稳,以及肌腱的节能减振这三点特征。
绿头鸭足形似银杏叶,共有4趾,分别是第一、二、三和四趾,为不等趾型常态足。第一趾向后,位置较其它3趾更高,不触地。第二、三和四趾向前,三趾间有全蹼相连,蹼薄,触感粗糙干燥,间有纹络。
为了模仿绿头鸭足趾-蹼及足底形貌等特征,本发明设计了仿生足部1,包括足蹼13、足趾12、足底边缘仿生曲线11和足底的凸起14;
仿生足部1由足底边缘仿生曲线11拉伸而成,足底边缘仿生曲线11确定了仿生足部1的具体形貌;在左右两边距足底边缘仿生曲线11一定距离处各开一槽,两槽间空有一足趾12的距离,槽中安置足蹼13,足趾12与足蹼13使用不同的材料进行组装以模仿绿头鸭足趾-蹼形貌特征。
足底的凸起14为一个个凸起的大小相同的小圆点,均匀分布于足趾底部,且足底凸起的最高处在同一平面内,其模仿绿头鸭足底粗糙纹路的功能,增大摩檫力;仿生足部1作为直接触地机构,能够增强仿生足的附着性和通过性。
绿头鸭足跖趾关节处跗跖骨远端具有三个关节头,分别与第二、三、四趾中的第一趾骨的关节窝相互配合,形成了类似三角形的三点稳定结构。跖趾关节能够用于帮助绿头鸭完成蹬离地面的足屈曲运动等,在足部运动上跖趾关节发挥着重要的作用,特别是支撑足部完成后期蹬离地面的效果。
为了模仿绿头鸭足跖趾关节处关节头与关节窝的结构与位置,本发明设计了仿跖趾关节,包括第一关节头211、第二关节头212、第三关节头213、第一关节窝221、第二关节窝222和第三关节窝223;
第一关节头211、第二关节头212、第三关节头213在位置上成三角分布,第一关节窝221、第二关节窝222和第三关节窝223在位置上也成三角分布;第二关节头212最大,其正放处于中间位置,并相对另两个关节头凸起,第一关节头211和第三关节头213大小相同,均倾斜放置,分别紧靠第二关节头212左右两侧,并与第二关节头212错开接触,且两关节头的摆放高度一致,即第一关节头211和第三关节头213相对于第二关节头212对称,第一关节窝221、第二关节窝222和第三关节窝223在位置上也成三角分布,第二关节窝222面积最大,其正放处于中间位置,并相对另两个关节窝凹陷,第一关节窝221和第三关节窝223大小相同,均倾斜放置,分别位于第二关节窝222左右两侧,并与第二关节窝222错开,且两关节窝的摆放高度一致,即第一关节窝221和第三关节窝223相对于第二关节窝222对称,第一关节窝221、第二关节窝222、第三关节窝223下凹深度一致;第一关节头211与第一关节窝221配合、第二关节头212与第二关节窝222配合、第Ⅳ关节头与第三关节窝223配合,仿跖趾关节2中关节头21和关节窝22的位置分布以及关节头21和关节窝22的配合共同起到了维持仿生抗沉陷足稳定的作用。
本发明模仿绿头鸭足关节头与关节窝的结构形貌与位置分布,仿跖趾关节包括关节头与关节窝,关节头与关节窝之间为球面接触,能够改善零件受力状况,提升结构稳定性,增强承重能力,起到缓冲作用,并减少磨损,延长使用寿命。
绿头鸭足趾背分布有伸肌,控制足趾的伸展,趾底分布有屈肌,主要控制足趾的屈曲。当绿头鸭运动时,伸肌和屈肌完美配合,实现足趾的弯曲和伸展。
绿头鸭足下降触地时,肌肉控制伸肌腱拉紧,屈肌松弛,足部逐渐接触地面。
绿头鸭提腿时,肌肉控制屈肌达到拉紧状态,足背的伸肌松弛,屈肌控制足趾弯曲,足部离开地面,绿头鸭足肌系统主要用来储存和释放能量,通过足肌系统提供的能量对足部其他部位产生作用,储能减震。
为了模仿绿头鸭足腱骨协同运动机制,本发明设计了仿肌腱单元4模仿绿头鸭足肌功能,仿肌腱单元4包括仿伸肌腱41与仿屈肌腱42,仿伸肌腱41与仿屈肌腱42结构上相同,功能上模仿伸肌与屈肌,包括弹簧411、弹簧座412、保护套筒413和固定盖414,弹簧411与弹簧座412焊为一体,保护套筒413为空心薄壁圆柱,弹簧411与一部分弹簧座412放置在保护套筒中,固定盖414与保护套筒413通过螺纹连接,使弹簧411被固定在保护套筒413内,弹簧座412与仿跗跖骨3铰接,保护套筒413与仿生足部1铰接,仿肌腱单元4分别与仿生足部1和仿跗跖骨3铰接,稳固仿跖趾关节2的连接,控制仿生足部1和仿跗跖骨3间的相对运动行程。
绿头鸭运动时,其下降触地时肌肉控制伸肌腱拉紧,屈肌腱松弛,控制足前掌先触地,足部逐渐接触地面,之后全掌触地,触地面积达到最大,离地时绿头鸭提腿,肌肉控制屈肌腱达到拉紧状态,足背的伸肌腱松弛,屈肌腱控制足趾弯曲,后掌先离地。
如图14、图15、图16所示,为本发明的工作过程:
仿生抗沉陷机械足刚触地时:
与绿头鸭的运动相对应,仿生足的仿生足部1第三趾122端首先触地,此时仿跗跖骨3处于后倾状态,仿跗跖骨3逐渐前倾,仿伸肌腱41压缩,仿屈肌腱42伸长,仿生足部1逐渐接触地面;
仿生抗沉陷机械足触地中期时:
仿生足的仿生足部1的足底完全与地面接触,触地面积达到最大,仿跗跖骨3基本处于中位;
仿生抗沉陷机械足离开地面时:
仿跗跖骨3前倾,仿伸肌腱41伸长,仿屈肌腱42压缩,仿生足部1掌心处首先离地腾空,全掌慢慢从后向前抬起,仿生足部1趾尖最后离地。
在整个工作过程中,仿跗跖骨3与仿生足部1通过仿跖趾关节2相对运动,仿跖趾关节2的关节头21与关节窝22之间通过球面副相对运动;仿肌腱单元4分别连接仿跗跖骨3与仿生足部1,运动时仿跗跖骨3与仿生足部1推拉弹簧座,弹簧座412与弹簧411为一体,将运动传递给弹簧411,使弹簧411拉伸或压缩,即储能或释放。
仿跖趾关节2是仿跗跖骨3与仿生足部1相对运动的枢纽和支点,增加机构的灵活性,仿肌腱单元4稳定仿跖趾关节2,稳固仿跗跖骨3与仿生足部1的连接,协助二者进行正常的相对活动。仿跖趾关节2与仿肌腱单元4使足更顺利完成运动行程。
应当理解,虽然本说明书是按照各个实施例描述的,但并非每个实施例仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
上文所列出的一系列的详细说明仅仅是针对本发明的可行性实施例的具体说明,它们并非用以限制本发明的保护范围,凡未脱离本发明技艺精神所作的等效实施例或变更均应包含在本发明的保护范围之内。